Система контролю за траєкторією руху транспортного засобу
Номер патенту: 114177
Опубліковано: 27.02.2017
Автори: Ломака Степан Йосифович, Рижих Леонід Олександрович, Кліменко Валерій Іванович, Леонтьєв Дмитро Миколайович
Формула / Реферат
1. Система контролю за траєкторією руху транспортного засобу, що містить супутниковий навігаційний пристрій, який має антену та курсопокажчик з індикатором і бічним датчиком прискорення, яка відрізняється тим, що система контролю дообладнана блоком обробки вхідної інформації з накопичувальною пам'яттю і модулем для можливості приєднання пересувного комп'ютера, каналами зв'язку з датчиками швидкості обертання автомобільних коліс, датчиком переміщення гальмівної педалі, датчиком переміщення педалі акселерометра, датчиком переміщення педалі зчеплення, датчиком повороту рульового колеса, шістьма датчиками тиску робочого тіла в гальмівній системі транспортного засобу, модулем відео- та аудіофіксації.
2. Система за п. 1, яка відрізняється тим, що курсопокажчик з індикатором має трикоординатний датчик прискорення.
Текст
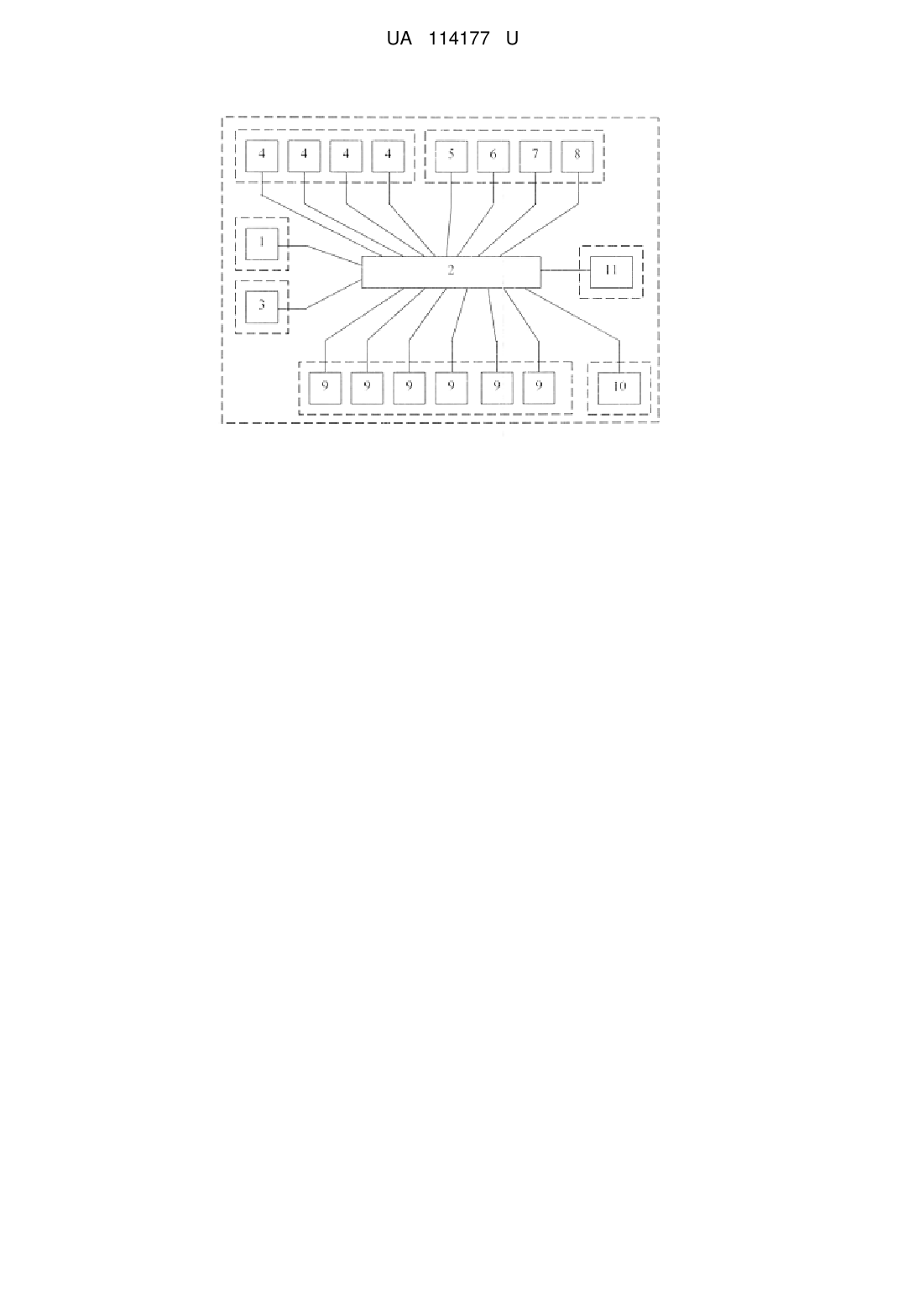
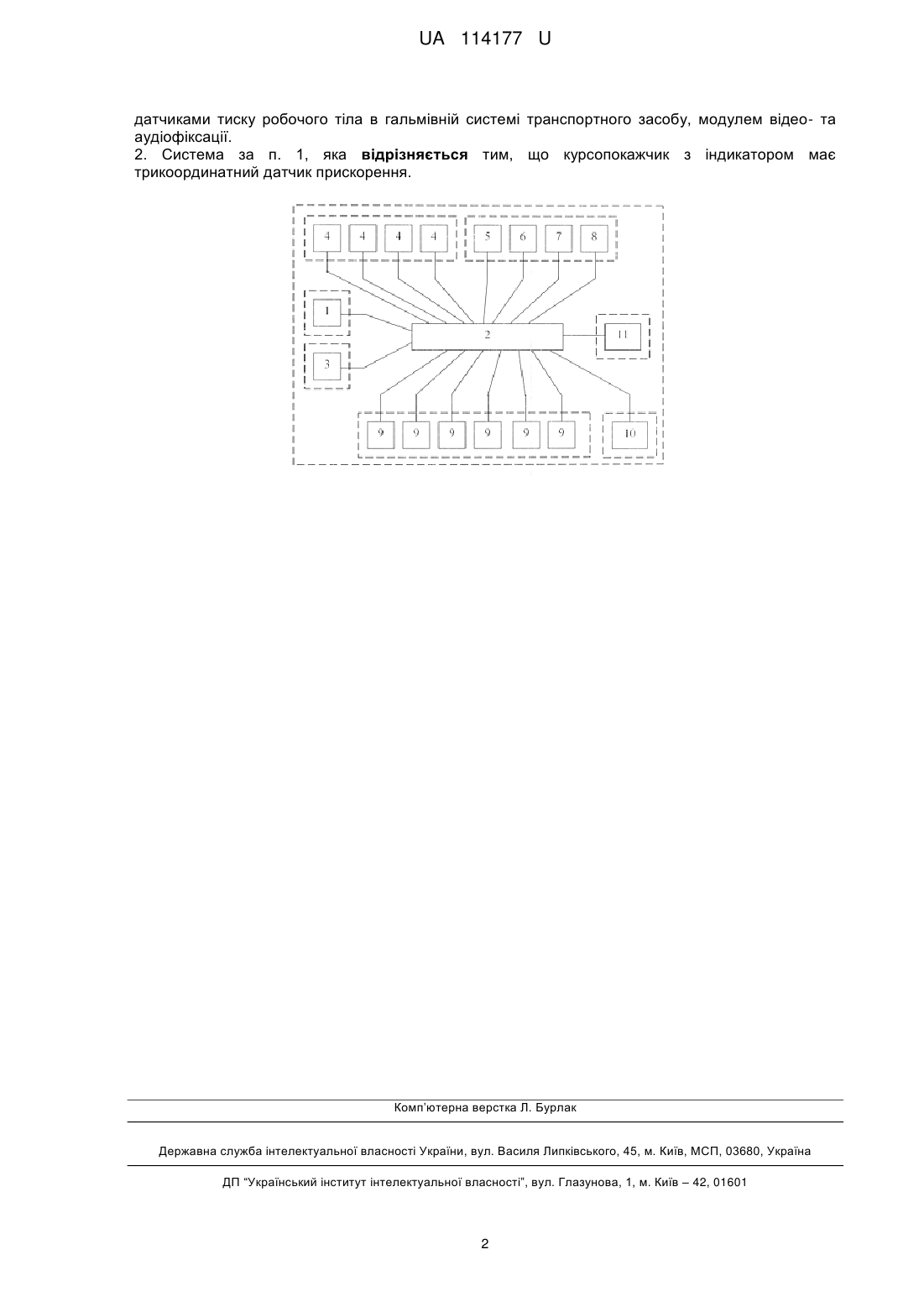
Реферат: Система контролю за траєкторією руху транспортного засобу містить супутниковий навігаційний пристрій, який має антену та курсопокажчик з індикатором і бічним датчиком прискорення. Система контролю дообладнана блоком обробки вхідної інформації з накопичувальною пам'яттю і модулем для можливості приєднання пересувного комп'ютера, каналами зв'язку з датчиками швидкості обертання автомобільних коліс, датчиком переміщення гальмівної педалі, датчиком переміщення педалі акселерометра, датчиком переміщення педалі зчеплення, датчиком повороту рульового колеса, шістьма датчиками тиску робочого тіла в гальмівній системі транспортного засобу, модулем відео- та аудіофіксації. Курсопокажчик з індикатором має трикоординатний датчик прискорення. UA 114177 U (12) UA 114177 U UA 114177 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до автомобільної техніки, а саме до технічних засобів контролю техніці в експлуатації. Найбільш близькою до корисної моделі є система контролю за траєкторією руху, яка у своєму складі має супутниковий навігаційний пристрій з антеною та курсопокажчиком обладнаним індикатором і датчиком прискорення, (див.: Патент на корисну модель UA 53393 U, МПК (2009), G08G 1/00, опубл. 11 жовтня 2010, Бюл. № 19). Недоліком аналога є те, що система може аналізувати параметри руху транспортного засобу тільки на основі відеобічного датчика прискорення і не враховує параметрів, які виникають внаслідок дій водія в конкретних умовах руху. В основу корисної моделі поставлена задача підвищення безпеки руху транспортного засобу за рахунок контролю траєкторії його руху при раціональному використанні вхідної інформації з різних інформаційних джерел. Поставлена задача вирішується тим, що система контролю за траєкторією руху транспортного засобу містить супутниковий навігаційний пристрій, який має антену та курсопокажчик з індикатором і трикоординатним датчиком прискорення, блок обробки вхідної інформації з накопичувальною пам'яттю і модуль для можливості приєднання пересувного комп'ютера, канали зв'язку з датчиками швидкості обертання автомобільних коліс, датчиком переміщення гальмівної педалі, датчиком переміщення педалі акселерометра, датчиком переміщення педалі зчеплення, датчиком повороту рульового колеса, шістьма датчиками тиску робочого тіла в гальмівній системі транспортного засобу, модулем відео- та аудіофіксації. Технічний результат полягає в поліпшенні безпеки руху транспортного засобу за рахунок контролю траєкторії його руху при раціональному використанні вхідної інформації з різних інформаційних джерел. Корисна модель пояснюється кресленням, де зображена функціональна схема корисної моделі контролю за траєкторією руху транспортного засобу. Система контролю за траєкторією руху транспортного засобу містить супутниковий навігаційний пристрій 1, який має антену та курсопокажчик з індикатором і три координатним датчиком прискорення, блок обробки вхідної інформації 2 з накопичувальною пам'яттю і модуль 3 для можливості приєднання пересувного комп'ютера, канали зв'язку з датчиками швидкості обертання автомобільних коліс 4, датчиком переміщення гальмівної педалі 5, датчиком переміщення педалі акселерометра 6, датчиком переміщення педалі зчеплення 7, датчиком повороту рульового колеса 8, шістьма датчиками тиску 9 робочого тіла в гальмівній системі транспортного засобу, модулем і 0 відео- та аудіофіксації. Система контролю за траєкторією руху транспортного засобу також має автономний блок живлення 11, який в разі необхідності заряджається від електричної мережі транспортного засобу. Робота системи контролю за траєкторією руху транспортного засобу полягає в наступному. Супутниковий навігаційний пристрій 1 надає інформацію оператору про стан руху транспортного засобу на віддалених ділянках за межами підприємства. Інформація отримана оператором формується блоком обробки вхідної інформації 2, який виконує аналіз та розрахунки на підставі датчиків 4-9 та інформації з відеорегістратора 10. Також інформація паралельно зберігається в пам'яті блока обробки вхідної інформації 2. Під час збереження інформації використовується технологія запису в режимі реального часу, що дає змогу проаналізувати обставини зміни траєкторії руху транспортного засобу, що не можливо зробити тільки на основі супутникового навігаційного пристрою 1, який має достатньо великий інтервал опитування бортових систем транспортного засобу. Система контролю за траєкторією руху транспортного засобу також дає змогу керівництву транспортного підприємства або власнику транспортного засобу оцінити кваліфікацію водія під час експлуатації транспортного засобу на дорогах загального користування або в умовах бездоріжжя. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 1. Система контролю за траєкторією руху транспортного засобу, що містить супутниковий навігаційний пристрій, який має антену та курсопокажчик з індикатором і бічним датчиком прискорення, яка відрізняється тим, що система контролю дообладнана блоком обробки вхідної інформації з накопичувальною пам'яттю і модулем для можливості приєднання пересувного комп'ютера, каналами зв'язку з датчиками швидкості обертання автомобільних коліс, датчиком переміщення гальмівної педалі, датчиком переміщення педалі акселерометра, датчиком переміщення педалі зчеплення, датчиком повороту рульового колеса, шістьма 1 UA 114177 U датчиками тиску робочого тіла в гальмівній системі транспортного засобу, модулем відео- та аудіофіксації. 2. Система за п. 1, яка відрізняється тим, що курсопокажчик з індикатором має трикоординатний датчик прискорення. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/00
Мітки: руху, контролю, система, транспортного, засобу, траєкторією
Код посилання
<a href="https://ua.patents.su/4-114177-sistema-kontrolyu-za-traehktoriehyu-rukhu-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Система контролю за траєкторією руху транспортного засобу</a>
Система контролю вихідних параметрів руху транспортного засобу
Номер патенту: 114176
Опубліковано: 27.02.2017
Автори: Ломака Степан Йосифович, Рижих Леонід Олександрович, Кліменко Валерій Іванович, Леонтьєв Дмитро Миколайович
МПК: G01C 23/00, H04N 21/00, G06F 13/00
Мітки: транспортного, контролю, засобу, вихідних, руху, параметрів, система
Формула / Реферат:
Система контролю вихідних параметрів руху транспортного засобу, яка містить модуль відео- та аудіофіксації і має можливість запису отриманої інформації, яка відрізняється тим, що має блок обробки вхідної інформації з датчиків швидкості обертання коліс транспортного засобу, датчика переміщення гальмівної педалі, датчика переміщення педалі акселерометра, датчика переміщення педалі зчеплення, датчика повороту рульового колеса, трикоординатного...
Система контролю за траєкторією руху
Номер патенту: 53393
Опубліковано: 11.10.2010
Автори: Лебедєв Анатолій Тихонович, Калінін Євген Іванович
МПК: G08G 1/00
Мітки: система, траєкторією, контролю, руху
Формула / Реферат:
Система контролю за траєкторією руху, що включає супутниковий навігаційний пристрій, який складається з антени та курсопокажчика, яка відрізняється тим, що курсопокажчик обладнують електронним блоком з індикатором і датчиком бічних прискорень, причому виходи курсопокажчика та датчика бічних прискорень з'єднані з входами електронного блока.
Система контролю за траєкторією руху та витратою палива
Номер патенту: 51162
Опубліковано: 12.07.2010
Автори: Антощенков Роман Вікторович, Мазоренко Дмитро Іванович, Лебедєв Анатолій Тихонович, Антощенков Віктор Миколайович, Артьомов Микола Прокопович
МПК: G05B 7/00
Мітки: контролю, система, траєкторією, руху, палива, витратою
Формула / Реферат:
Система контролю за траєкторією руху та витратою палива, що включає супутниковий навігаційний пристрій, який складається з антени та курсопокажчика, який відрізняється тим, що додатково вводиться електронний блок з індикатором і датчик витрати палива, причому виходи курсопокажчика та датчика витрати палива з'єднані з входами електронного блока.
Система контролю експлуатаційних характеристик транспортного засобу

Номер патенту: 36189
Опубліковано: 10.10.2008
Автори: Пашкевич Леонід Полікарпович, Новіков Юрій Юрійович
МПК: G07C 5/00
Мітки: засобу, транспортного, система, контролю, експлуатаційних, характеристик
Формула / Реферат:
1. Система контролю експлуатаційних характеристик транспортного засобу, що містить датчики параметрів, систему обробки даних, яка відрізняється тим, що містить блок живлення, з'єднаний з бортовим комп'ютером, модулем і блоком збору та відображення інформації, який з'єднано з бортовим комп'ютером і з яким з'єднано датчики параметрів, причому модуль з'єднано з бортовим комп'ютером та за допомогою GSM-зв'язку з центральним сервером.2....
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху
Номер патенту: 96433
Опубліковано: 10.02.2015
Автори: Бандура Іван Миколайович, Саратова Тетяна Сергіївна, Дергачов Константин Юрійович, Кулік Анатолій Степанович
МПК: G08G 1/01
Мітки: координації, комплексного, засобів, безпекою, транспортного, транспортних, контролю, руху, система
Формула / Реферат:
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого...
Попередній патент: Система контролю вихідних параметрів руху транспортного засобу
Наступний патент: Спосіб лікування хронічних вірусних гепатитів
Випадковий патент: Спосіб бромування фуранів