Верстат-гексапод

Формула / Реферат
Верстат-гексапод, що містить рухому платформу, на якій змонтовано шпиндельну головку, та кінематичні ланки змінної довжини, який відрізняється тим, що додатково містить вісім кінематичних ланок змінної довжини, які встановлено на поверхні деталі, що обробляється.
Текст
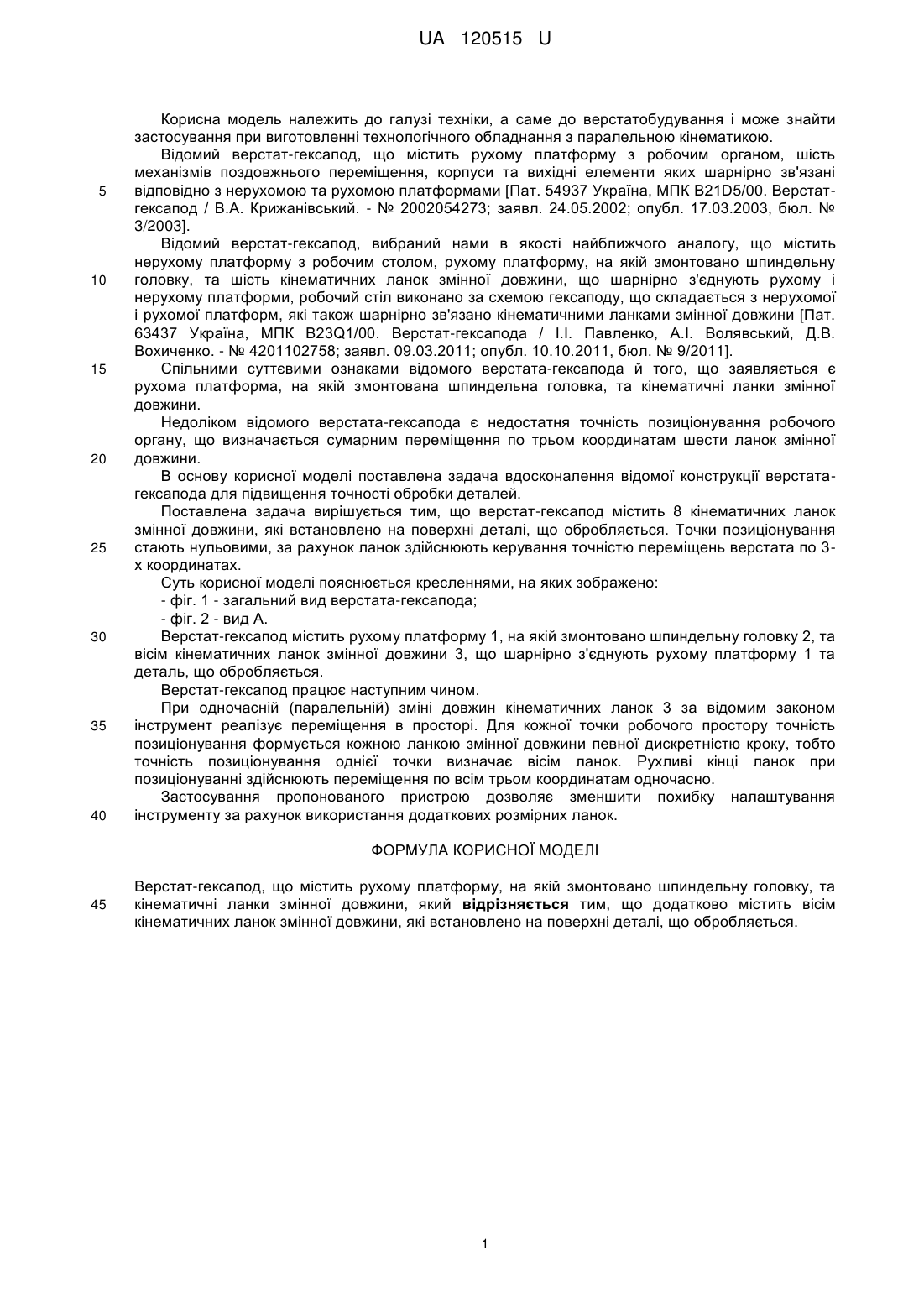
Реферат: UA 120515 U UA 120515 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі техніки, а саме до верстатобудування і може знайти застосування при виготовленні технологічного обладнання з паралельною кінематикою. Відомий верстат-гексапод, що містить рухому платформу з робочим органом, шість механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами [Пат. 54937 Україна, МПК B21D5/00. Верстатгексапод / В.А. Крижанівський. - № 2002054273; заявл. 24.05.2002; опубл. 17.03.2003, бюл. № 3/2003]. Відомий верстат-гексапод, вибраний нами в якості найближчого аналогу, що містить нерухому платформу з робочим столом, рухому платформу, на якій змонтовано шпиндельну головку, та шість кінематичних ланок змінної довжини, що шарнірно з'єднують рухому і нерухому платформи, робочий стіл виконано за схемою гексаподу, що складається з нерухомої і рухомої платформ, які також шарнірно зв'язано кінематичними ланками змінної довжини [Пат. 63437 Україна, МПК B23Q1/00. Верстат-гексапода / І.І. Павленко, А.І. Волявський, Д.В. Вохиченко. - № 4201102758; заявл. 09.03.2011; опубл. 10.10.2011, бюл. № 9/2011]. Спільними суттєвими ознаками відомого верстата-гексапода й того, що заявляється є рухома платформа, на якій змонтована шпиндельна головка, та кінематичні ланки змінної довжини. Недоліком відомого верстата-гексапода є недостатня точність позиціонування робочого органу, що визначається сумарним переміщення по трьом координатам шести ланок змінної довжини. В основу корисної моделі поставлена задача вдосконалення відомої конструкції верстатагексапода для підвищення точності обробки деталей. Поставлена задача вирішується тим, що верстат-гексапод містить 8 кінематичних ланок змінної довжини, які встановлено на поверхні деталі, що обробляється. Точки позиціонування стають нульовими, за рахунок ланок здійснюють керування точністю переміщень верстата по 3х координатах. Суть корисної моделі пояснюється кресленнями, на яких зображено: - фіг. 1 - загальний вид верстата-гексапода; - фіг. 2 - вид А. Верстат-гексапод містить рухому платформу 1, на якій змонтовано шпиндельну головку 2, та вісім кінематичних ланок змінної довжини 3, що шарнірно з'єднують рухому платформу 1 та деталь, що обробляється. Верстат-гексапод працює наступним чином. При одночасній (паралельній) зміні довжин кінематичних ланок 3 за відомим законом інструмент реалізує переміщення в просторі. Для кожної точки робочого простору точність позиціонування формується кожною ланкою змінної довжини певної дискретністю кроку, тобто точність позиціонування однієї точки визначає вісім ланок. Рухливі кінці ланок при позиціонуванні здійснюють переміщення по всім трьом координатам одночасно. Застосування пропонованого пристрою дозволяє зменшити похибку налаштування інструменту за рахунок використання додаткових розмірних ланок. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Верстат-гексапод, що містить рухому платформу, на якій змонтовано шпиндельну головку, та кінематичні ланки змінної довжини, який відрізняється тим, що додатково містить вісім кінематичних ланок змінної довжини, які встановлено на поверхні деталі, що обробляється. 1 UA 120515 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: верстат-гексапод
Код посилання
<a href="https://ua.patents.su/4-120515-verstat-geksapod.html" target="_blank" rel="follow" title="База патентів України">Верстат-гексапод</a>
Верстат-гексапод
Номер патенту: 63437
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович, Павленко Іван Іванович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, що шарнірно з'єднують рухому і нерухому платформи, робочий стіл виконаний за схемою гексапода і складається з нерухомої і рухомої платформ, які також шарнірно зв'язані кінематичними ланками змінної довжини, який відрізняється тим, що застосовується робочий стіл,...
Верстат-гексапод
Номер патенту: 63432
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Павленко Іван Іванович, Валявський Іван Анатолійович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, шпиндельна головка складається з нерухомої та рухомої платформ, що шарнірно зв'язані шістьма кінематичними ланками змінної довжини, який відрізняється тим, що використовується шпиндельна головка, виконана за схемою гексапод, що надає інструменту додатково шість...
Верстат-гексапод
Номер патенту: 88988
Опубліковано: 10.04.2014
Автори: Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Вахніченко Руслан Володимирович, Павленко Іван Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи рухомої платформи, які шарнірно зв'язані кінематичними ланками змінної довжини, робочого столу, змонтованого на платформі, робочий стіл складається з нерухомої платформи, кінематичних ланок та рухомої платформи із заготовкою, на рухомій платформі змонтована шпиндельна головка, яка складається з нерухомої платформи, кінематичних ланок та рухомої платформи, де встановлюється інструмент,...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Верстат-гексапод
Номер патенту: 64804
Опубліковано: 25.11.2011
Автори: Павленко Іван Іванович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що містить нерухому шестигранну конічну основу, на площинах якої розташовані напрямні, рухомий виконавчий орган з відповідним інструментом, шість кінематичних ланок та механізм лінійних переміщень опорних шарнірів, який відрізняється тим, що використовуються кінематичні ланки змінної довжини, які з'єднують рухомий виконавчий орган з нерухомою основою.
Попередній патент: Гідровузол для відводу води з польдерної осушувальної системи
Наступний патент: Карта-чек рисової системи з різноглибоким закладанням дренажу
Випадковий патент: Аспіраційно-механічна система уловлювання і збору газів з радіоактивним пилом, викидуваних з реактивного блока атомної електростанції