Спосіб регулювання відцентрового насоса
Номер патенту: 12072
Опубліковано: 16.01.2006
Автори: Малєєв Віктор Борисович, Прищенко Володимир Анатолійович
Формула / Реферат
Спосіб регулювання відцентрового насоса, що включає вимір і регулювання параметрів роботи насоса, виконаного з поворотними лопатками, який відрізняється тим, що здійснюють вимірювання фактичного значення подачі і формування сигналу керування кута нахилу лопаток вхідного направляючого апарата, причому кут нахилу лопаток визначають за формулою:
![]()
де:
![]() - колова швидкість потоку на вхідній кромці робочого колеса,
- колова швидкість потоку на вхідній кромці робочого колеса,
![]() - меридіональна швидкість потоку на вхідній кромці робочого колеса,
- меридіональна швидкість потоку на вхідній кромці робочого колеса,
![]() - показник режиму роботи насоса,
- показник режиму роботи насоса,
![]() - кут нахилу вхідної кромки лопатки робочого колеса.
- кут нахилу вхідної кромки лопатки робочого колеса.
Текст
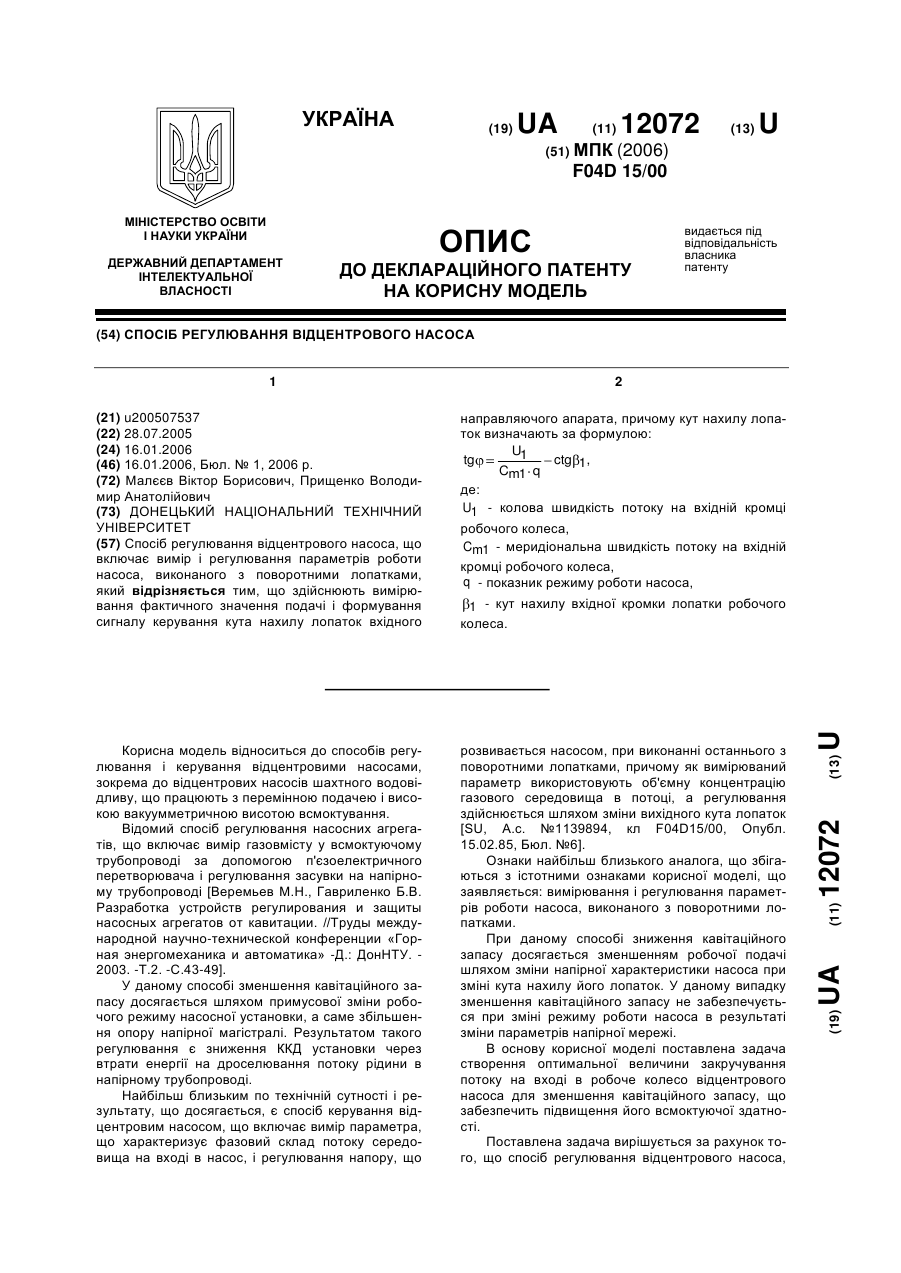
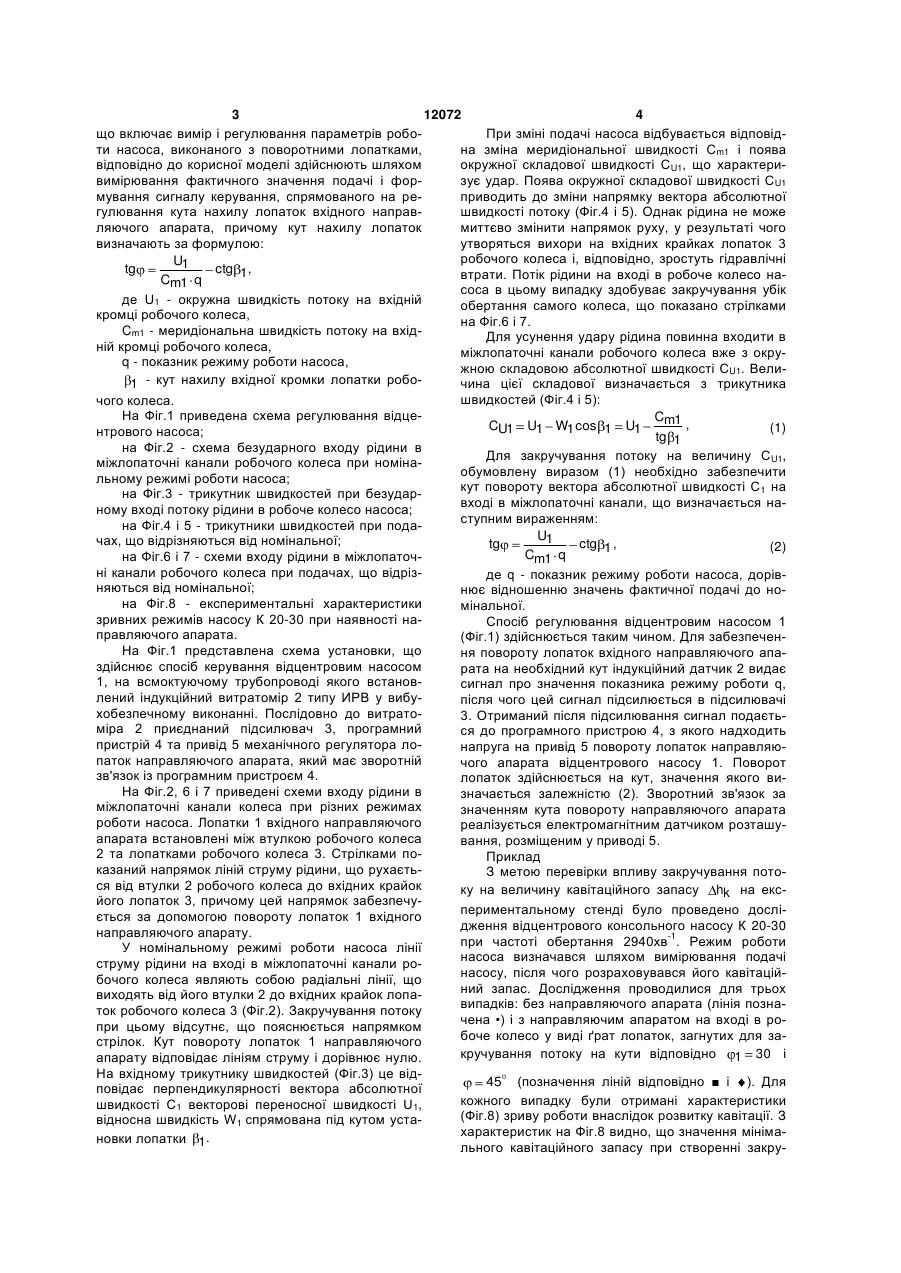
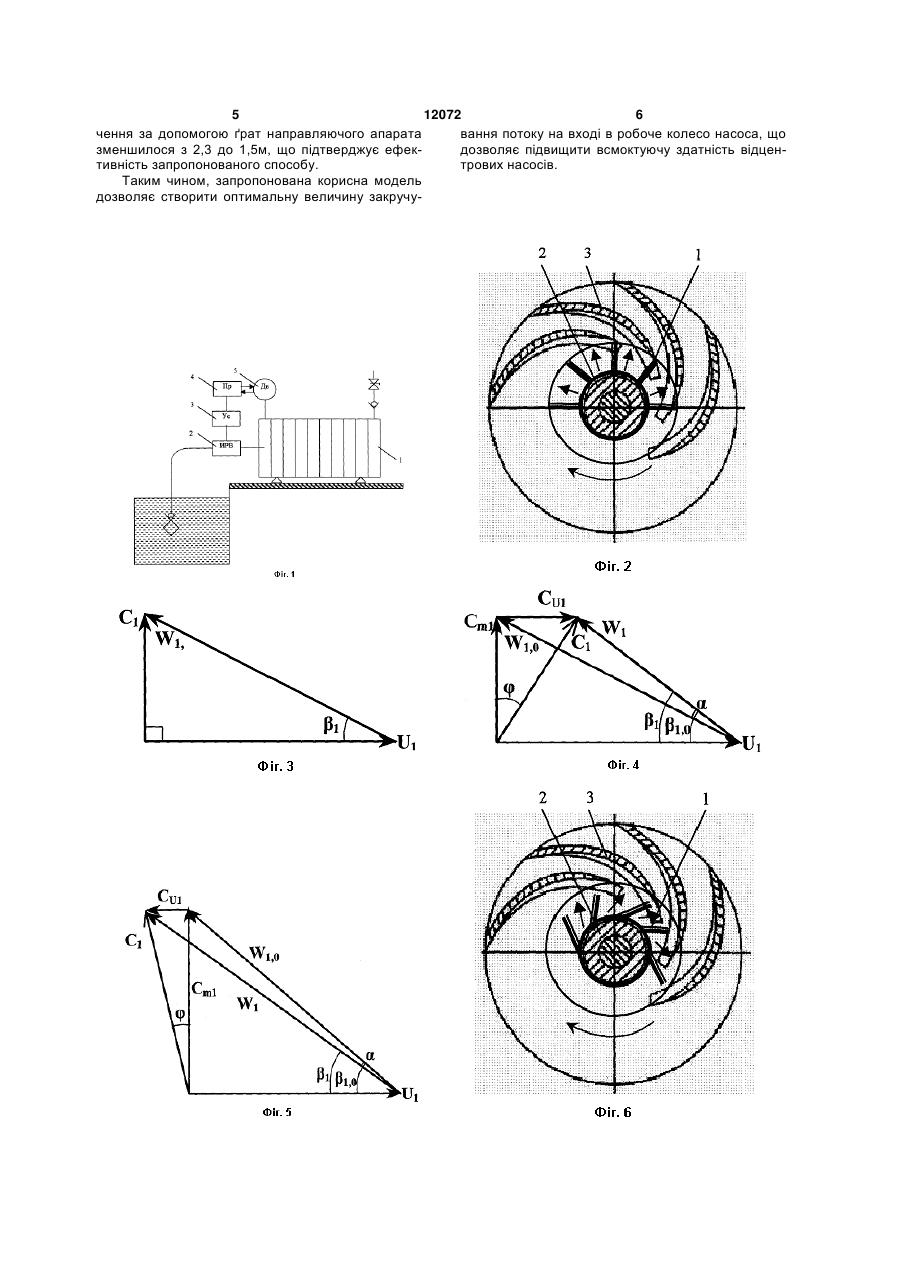
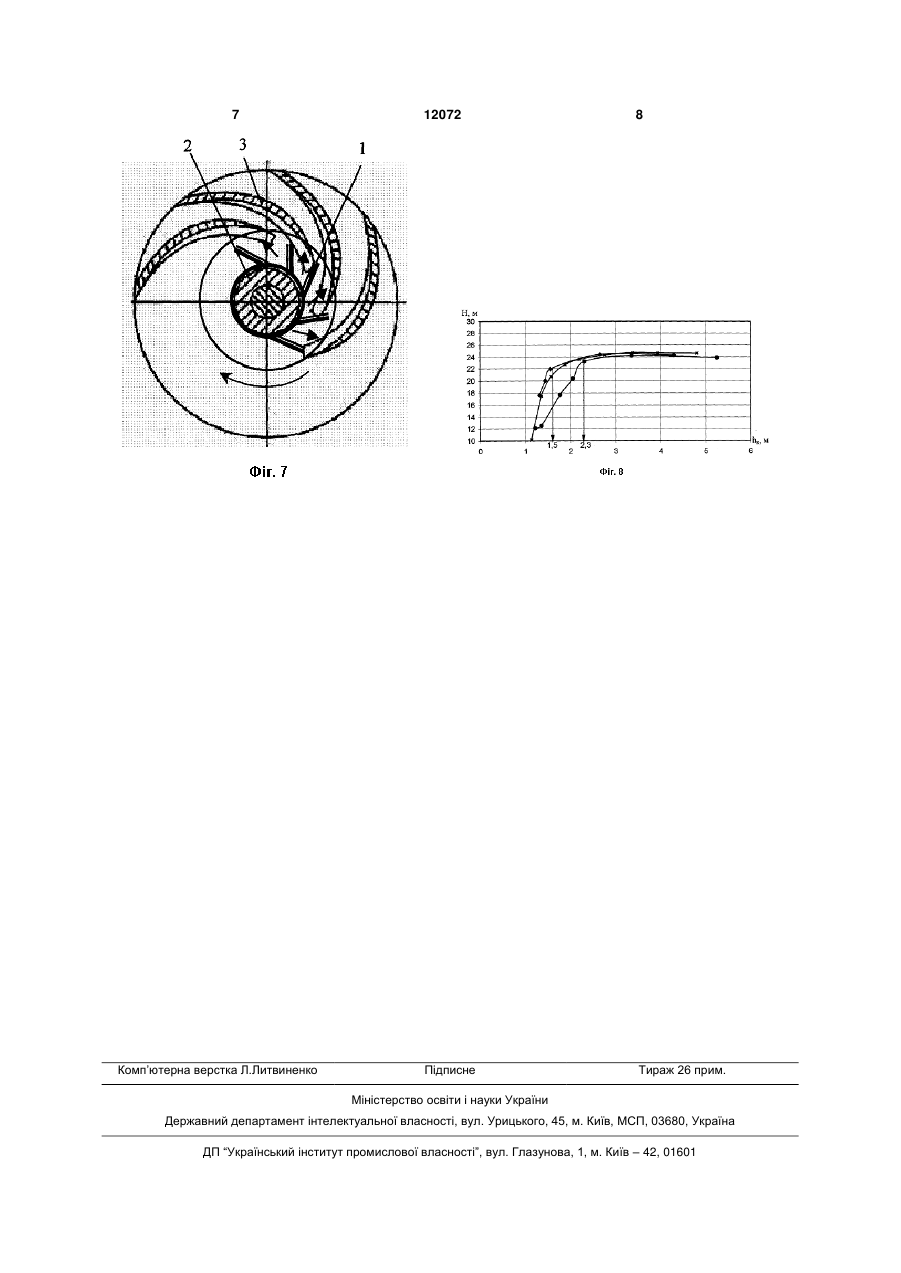
Спосіб регулювання відцентрового насоса, що включає вимір і регулювання параметрів роботи насоса, виконаного з поворотними лопатками, який відрізняється тим, що здійснюють вимірювання фактичного значення подачі і формування сигналу керування кута нахилу лопаток вхідного направляючого апарата, причому кут нахилу лопаток визначають за формулою: U1 tg ctg 1, Cm1 q де: U1 - колова швидкість потоку на вхідній кромці робочого колеса, Cm1 - меридіональна швидкість потоку на вхідній кромці робочого колеса, q - показник режиму роботи насоса, Корисна модель відноситься до способів регулювання і керування відцентровими насосами, зокрема до відцентрових насосів шахтного водовідливу, що працюють з перемінною подачею і високою вакуумметричною висотою всмоктування. Відомий спосіб регулювання насосних агрегатів, що включає вимір газовмісту у всмоктуючому трубопроводі за допомогою п'єзоелектричного перетворювача і регулювання засувки на напірному трубопроводі [Веремьев М.Н., Гавриленко Б.В. Разработка устройств регулирования и защиты насосных агрегатов от кавитации. //Труды международной научно-технической конференции «Горная энергомеханика и автоматика» -Д.: ДонНТУ. 2003. -Т.2. -С.43-49]. У даному способі зменшення кавітаційного запасу досягається шляхом примусової зміни робочого режиму насосної установки, а саме збільшення опору напірної магістралі. Результатом такого регулювання є зниження ККД установки через втрати енергії на дроселювання потоку рідини в напірному трубопроводі. Найбільш близьким по технічній сутності і результату, що досягається, є спосіб керування відцентровим насосом, що включає вимір параметра, що характеризує фазовий склад потоку середовища на вході в насос, і регулювання напору, що розвивається насосом, при виконанні останнього з поворотними лопатками, причому як вимірюваний параметр використовують об'ємну концентрацію газового середовища в потоці, а регулювання здійснюється шляхом зміни вихідного кута лопаток [SU, А.с. №1139894, кл F04D15/00, Опубл. 15.02.85, Бюл. №6]. Ознаки найбільш близького аналога, що збігаються з істотними ознаками корисної моделі, що заявляється: вимірювання і регулювання параметрів роботи насоса, виконаного з поворотними лопатками. При даному способі зниження кавітаційного запасу досягається зменшенням робочої подачі шляхом зміни напірної характеристики насоса при зміні кута нахилу його лопаток. У даному випадку зменшення кавітаційного запасу не забезпечується при зміні режиму роботи насоса в результаті зміни параметрів напірної мережі. В основу корисної моделі поставлена задача створення оптимальної величини закручування потоку на вході в робоче колесо відцентрового насоса для зменшення кавітаційного запасу, що забезпечить підвищення його всмоктуючої здатності. Поставлена задача вирішується за рахунок того, що спосіб регулювання відцентрового насоса, (19) UA (11) 12072 (13) U 1 - кут нахилу вхідної кромки лопатки робочого колеса. 3 12072 4 що включає вимір і регулювання параметрів робоПри зміні подачі насоса відбувається відповідти насоса, виконаного з поворотними лопатками, на зміна меридіональної швидкості Сm1 і поява відповідно до корисної моделі здійснюють шляхом окружної складової швидкості CU1, що характеривимірювання фактичного значення подачі і форзує удар. Поява окружної складової швидкості CU1 мування сигналу керування, спрямованого на реприводить до зміни напрямку вектора абсолютної гулювання кута нахилу лопаток вхідного направшвидкості потоку (Фіг.4 і 5). Однак рідина не може ляючого апарата, причому кут нахилу лопаток миттєво змінити напрямок руху, у результаті чого визначають за формулою: утворяться вихори на вхідних крайках лопаток 3 робочого колеса і, відповідно, зростуть гідравлічні U1 tg ctg 1, втрати. Потік рідини на вході в робоче колесо наCm1 q соса в цьому випадку здобуває закручування убік де U1 - окружна швидкість потоку на вхідній обертання самого колеса, що показано стрілками кромці робочого колеса, на Фіг.6 і 7. Cm1 - меридіональна швидкість потоку на вхідДля усунення удару рідина повинна входити в ній кромці робочого колеса, міжлопаточні канали робочого колеса вже з окруq - показник режиму роботи насоса, жною складовою абсолютної швидкості CU1. Вели1 - кут нахилу вхідної кромки лопатки робочина цієї складової визначається з трикутника швидкостей (Фіг.4 і 5): чого колеса. На Фіг.1 приведена схема регулювання відцеCm1 , CU1 U1 W1 cos 1 U1 (1) нтрового насоса; tg 1 на Фіг.2 - схема безударного входу рідини в Для закручування потоку на величину СU1, міжлопаточні канали робочого колеса при номінаобумовлену виразом (1) необхідно забезпечити льному режимі роботи насоса; кут повороту вектора абсолютної швидкості С1 на на Фіг.3 - трикутник швидкостей при безударвході в міжлопаточні канали, що визначається наному вході потоку рідини в робоче колесо насоса; ступним вираженням: на Фіг.4 і 5 - трикутники швидкостей при подаU1 чах, що відрізняються від номінальної; tg ctg 1 , (2) Cm1 q на Фіг.6 і 7 - схеми входу рідини в міжлопаточні канали робочого колеса при подачах, що відрізде q - показник режиму роботи насоса, дорівняються від номінальної; нює відношенню значень фактичної подачі до нона Фіг.8 - експериментальні характеристики мінальної. зривних режимів насосу К 20-30 при наявності наСпосіб регулювання відцентровим насосом 1 правляючого апарата. (Фіг.1) здійснюється таким чином. Для забезпеченНа Фіг.1 представлена схема установки, що ня повороту лопаток вхідного направляючого апаздійснює спосіб керування відцентровим насосом рата на необхідний кут індукційний датчик 2 видає 1, на всмоктуючому трубопроводі якого встановсигнал про значення показника режиму роботи q, лений індукційний витратомір 2 типу ИРВ у вибупісля чого цей сигнал підсилюється в підсилювачі хобезпечному виконанні. Послідовно до витрато3. Отриманий після підсилювання сигнал подаєтьміра 2 приєднаний підсилювач 3, програмний ся до програмного пристрою 4, з якого надходить пристрій 4 та привід 5 механічного регулятора лонапруга на привід 5 повороту лопаток направляюпаток направляючого апарата, який має зворотній чого апарата відцентрового насосу 1. Поворот зв'язок із програмним пристроєм 4. лопаток здійснюється на кут, значення якого виНа Фіг.2, 6 і 7 приведені схеми входу рідини в значається залежністю (2). Зворотний зв'язок за міжлопаточні канали колеса при різних режимах значенням кута повороту направляючого апарата роботи насоса. Лопатки 1 вхідного направляючого реалізується електромагнітним датчиком розташуапарата встановлені між втулкою робочого колеса вання, розміщеним у приводі 5. 2 та лопатками робочого колеса 3. Стрілками поПриклад казаний напрямок ліній струму рідини, що рухаєтьЗ метою перевірки впливу закручування потося від втулки 2 робочого колеса до вхідних крайок ку на величину кавітаційного запасу hk на ексйого лопаток 3, причому цей напрямок забезпечупериментальному стенді було проведено досліється за допомогою повороту лопаток 1 вхідного дження відцентрового консольного насосу К 20-30 направляючого апарату. при частоті обертання 2940хв-1. Режим роботи У номінальному режимі роботи насоса лінії насоса визначався шляхом вимірювання подачі струму рідини на вході в міжлопаточні канали ронасосу, після чого розраховувався його кавітаційбочого колеса являють собою радіальні лінії, що ний запас. Дослідження проводилися для трьох виходять від його втулки 2 до вхідних крайок лопавипадків: без направляючого апарата (лінія познаток робочого колеса 3 (Фіг.2). Закручування потоку чена •) і з направляючим апаратом на вході в ропри цьому відсутнє, що пояснюється напрямком боче колесо у виді ґрат лопаток, загнутих для застрілок. Кут повороту лопаток 1 направляючого кручування потоку на кути відповідно 1 30 і апарату відповідає лініям струму і дорівнює нулю. На вхідному трикутнику швидкостей (Фіг.3) це від45 (позначення ліній відповідно і ). Для повідає перпендикулярності вектора абсолютної кожного випадку були отримані характеристики швидкості С1 векторові переносної швидкості U1, (Фіг.8) зриву роботи внаслідок розвитку кавітації. З відносна швидкість W1 спрямована під кутом устахарактеристик на Фіг.8 видно, що значення мініма. новки лопатки 1 льного кавітаційного запасу при створенні закру 5 12072 6 чення за допомогою ґрат направляючого апарата вання потоку на вході в робоче колесо насоса, що зменшилося з 2,3 до 1,5м, що підтверджує ефекдозволяє підвищити всмоктуючу здатність відцентивність запропонованого способу. трових насосів. Таким чином, запропонована корисна модель дозволяє створити оптимальну величину закручу 7 Комп’ютерна верстка Л.Литвиненко 12072 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of centrifugal pump
Автори англійськоюMalieiev Viktor Borysovych, Pryschenko Volodymyr Anatoliiovych
Назва патенту російськоюСпособ регулировки центробежного насоса
Автори російськоюМалеев Виктор Борисович, Прищенко Владимир Анатольевич
МПК / Мітки
МПК: F04D 15/00
Мітки: відцентрового, спосіб, регулювання, насоса
Код посилання
<a href="https://ua.patents.su/4-12072-sposib-regulyuvannya-vidcentrovogo-nasosa.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання відцентрового насоса</a>
Вхідний регульований напрямниий апарат відцентрового насоса
Номер патенту: 12092
Опубліковано: 16.01.2006
Автори: Прищенко Володимир Анатолійович, Малєєв Віктор Борисович
МПК: F04D 29/46
Мітки: апарат, напрямниий, відцентрового, регульованій, вхідний, насоса
Формула / Реферат:
Вхідний регульований напрямний апарат відцентрового насоса, який містить коаксіально розміщені одна до одної зовнішню і внутрішню обичайки і розміщені між ними лопатки, який відрізняється тим, що вхідний регульований напрямний апарат містить механізм одночасного повороту всіх лопаток, який являє собою поворотне кільце із напрямними гвинтами, пропущеними крізь похилі радіальні пази в хвостовиках поворотних лопаток.
Спосіб регулювання режиму роботи відцентрового вентилятора
Номер патенту: 5486
Опубліковано: 15.03.2005
Автори: Ковалевська Вікторія Іонівна, Васильєв Юрій Валерійович, Хоружий Олександр Миколайович, Співак Володимир Андрійович, Долотов Вячеслав Вячеславович
МПК: F04D 15/00
Мітки: режиму, регулювання, відцентрового, спосіб, роботи, вентилятора
Формула / Реферат:
Спосіб регулювання режиму роботи відцентрового вентилятора, що має робоче колесо з виконаними з плоско-випуклих обичайок профільними лопатками, шляхом укорочування лопаток їх обрізуванням по окружності заданого радіуса, який відрізняється тим, що обичайки кожної лопатки обрізають на однакову довжину від вихідної частини лопатки, потім до лінії розрізу прикріплюють, наприклад, за допомогою зварювання елемент у формі двогранного кута, грані...
Робоче колесо насоса відцентрового або напіваксіального типу
Номер патенту: 32612
Опубліковано: 15.02.2001
Автор: Арбеус Ульф
МПК: F04D 7/00, F04D 29/18
Мітки: насоса, типу, колесо, робоче, відцентрового, напіваксіального
Текст:
...градусів переважно 140 180 градусів Особливістю пропонованого робочого коле са насоса є й те що вхідна кромка лопаті розміще на в площині що перпендикулярна до вала робо чого колеса і в межах зони розташування має ци ліндричну форму входу насоса де абсолютна швидкість перекачуваного середовища має по су ті о сьовий напрямок Особливістю пропонованого робочого коле са насоса є и те що з єднання вхідної кромки з ма точиною примикає до торця...
Установка для заливу відцентрового насоса
Номер патенту: 34203
Опубліковано: 15.02.2001
Автор: Філіпович Юрій Юрійович
МПК: F04D 9/00
Мітки: установка, відцентрового, насоса, заливу
Текст:
...повітря, внаслідок чого рівень води у вакуумному баці-конденсаторі 3 буде понижуватися. При досягненні ниж нього установленого рівня води вмикається релесигналізатор рівня води у котлі 5 і дає команду на заповнення вакуумного бака-конденсатора 3 новою порцією перегрітого пару. Збільшення тривалості робочого часу можливе за рахунок поступового охолодження перегрітого пару. З цією метою стінки вакуумного бака-конденсатора виконано...
Відведення відцентрового насоса

Номер патенту: 16038
Опубліковано: 29.08.1997
Автор: Савицький Всеволод Олександрович
МПК: F04D 29/42
Мітки: відведення, насоса, відцентрового
Формула / Реферат:
Отвод центробежного насоса, содержащий выходной патрубок с фланцем и спиральную отводящую камеру с языком и расположенным на нем сменным элементом, выполненным по форме языка, отличающийся тем, что, с целью снижения трудоемкости ремонта при эксплуатации путем упрощения замены или ремонта сменного элемента, последний выполнен в виде изогнутой пластины с фланцем, закрепленным на фланце выходного патрубка.
Попередній патент: Спосіб функціональної ультразвукової оцінки спроможності внутрішнього вічка шийки матки при вагітності
Наступний патент: Спосіб діагностики дисфункції дистального відділу лікворошунтуючих систем
Випадковий патент: Гірничий комбайн