Інтелектуальний контролер з нейронною мережею
Номер патенту: 120728
Опубліковано: 10.11.2017
Автори: Циганенко Василь Володимирович, Кишенько Василь Дмитрович, Рачіпа Максим Сергійович, Ладанюк Анатолій Петрович

Формула / Реферат
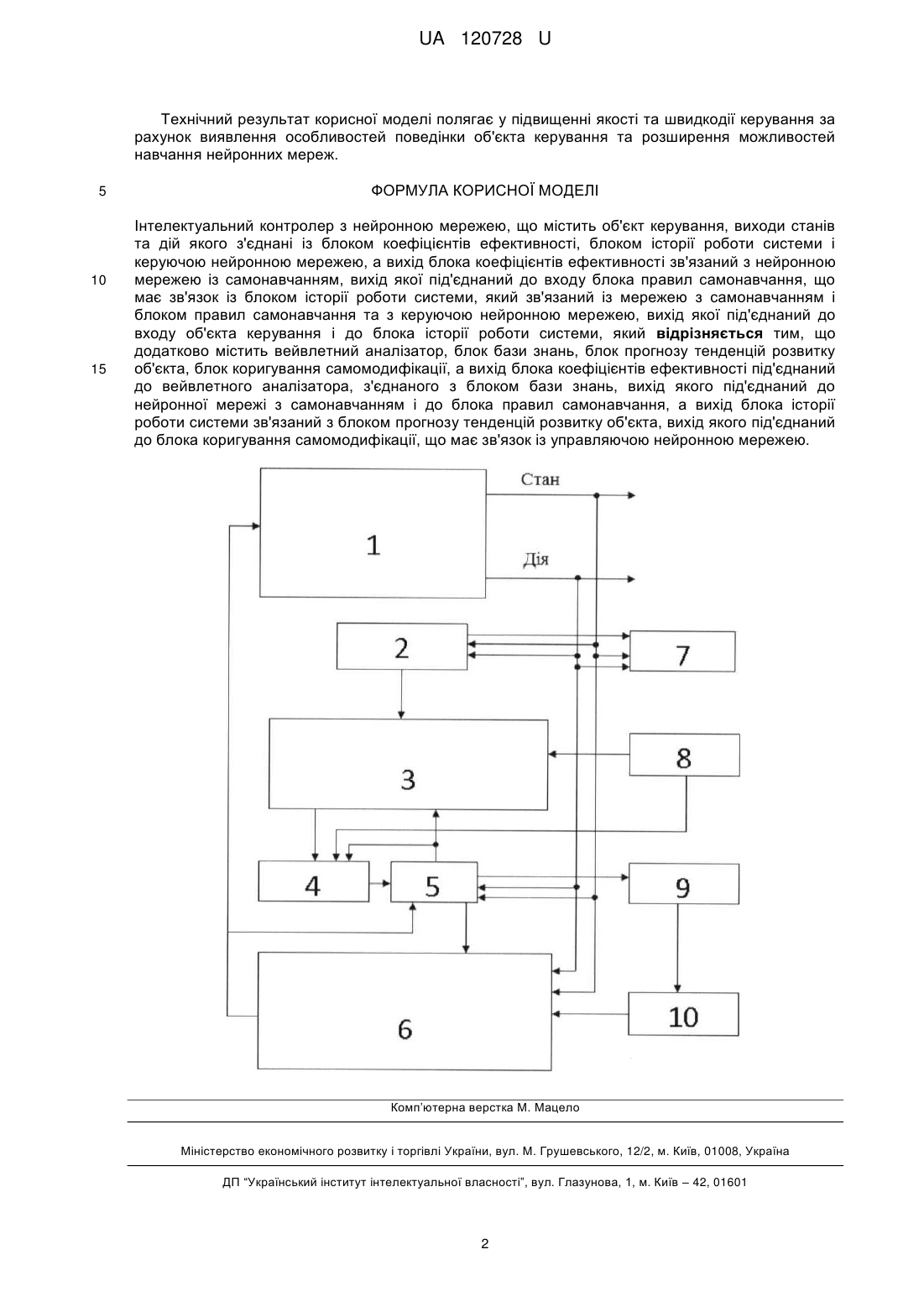
Інтелектуальний контролер з нейронною мережею, що містить об'єкт керування, виходи станів та дій якого з'єднані із блоком коефіцієнтів ефективності, блоком історії роботи системи і керуючою нейронною мережею, а вихід блока коефіцієнтів ефективності зв'язаний з нейронною мережею із самонавчанням, вихід якої під'єднаний до входу блока правил самонавчання, що має зв'язок із блоком історії роботи системи, який зв'язаний із мережею з самонавчанням і блоком правил самонавчання та з керуючою нейронною мережею, вихід якої під'єднаний до входу об'єкта керування і до блока історії роботи системи, який відрізняється тим, що додатково містить вейвлетний аналізатор, блок бази знань, блок прогнозу тенденцій розвитку об'єкта, блок коригування самомодифікації, а вихід блока коефіцієнтів ефективності під'єднаний до вейвлетного аналізатора, з'єднаного з блоком бази знань, вихід якого під'єднаний до нейронної мережі з самонавчанням і до блока правил самонавчання, а вихід блока історії роботи системи зв'язаний з блоком прогнозу тенденцій розвитку об'єкта, вихід якого під'єднаний до блока коригування самомодифікації, що має зв'язок із управляючою нейронною мережею.
Текст
Реферат: Інтелектуальний контролер з нейронною мережею містить об'єкт керування, виходи станів та дій якого з'єднані із блоком коефіцієнтів ефективності, блоком історії роботи системи і керуючою нейронною мережею, а вихід блока коефіцієнтів ефективності зв'язаний з нейронною мережею із самонавчанням, вихід якої під'єднаний до входу блока правил самонавчання, що має зв'язок із блоком історії роботи системи, який зв'язаний із мережею з самонавчанням і блоком правил самонавчання та з керуючою нейронною мережею, вихід якої під'єднаний до входу об'єкта керування і до блока історії роботи системи. Додатково містить вейвлетний аналізатор, блок бази знань, блок прогнозу тенденцій розвитку об'єкта, блок коригування самомодифікації. UA 120728 U (54) ІНТЕЛЕКТУАЛЬНИЙ КОНТРОЛЕР З НЕЙРОННОЮ МЕРЕЖЕЮ UA 120728 U UA 120728 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем автоматичного керування складними об'єктами, що функціонують в умовах невизначеностей. Як прототип вибрано інтелектуальний контролер з нейронною мережею і правилами самомодифікації [Пат. РФ № 2266558; заявл. 20031138/97/09 від 13.12.2003 р., опубл. 10.06.2005 р., бюл. № 35], який містить: об'єкт керування, блок коефіцієнтів ефективності, нейронну мережу з самонавчанням, блок правил самонавчання, блок історії роботи системи, керуючу нейронну мережу. До недоліків цього інтелектуального контролера можна віднести низьку швидкодію в умовах невизначеності внаслідок збільшення часу навчання нейронних мереж. Задача корисної моделі - збільшення швидкодії системи керування за рахунок визначення особливостей інформації про стан об'єкта. Поставлена задача вирішується тим, що контролер містить об'єкт керування, виходи станів та дій якого з'єднані з блоком коефіцієнтів ефективності, блоком історії роботи системи, керуючою нейронною мережею, вейвлетним аналізатором. Вихід блока коефіцієнтів ефективності під'єднаний до входу нейронної мережі з самонавчанням і до вейвлетного аналізатора. Вихід нейронної мережі з самонавчанням з'єднаний з блоком правил самонавчання. Вихід блока правил самонавчання зв'язаний з блоком історії роботи системи, вихід якого під'єднаний до нейронної мережі з самонавчанням, до блока правил самонавчання, до блока прогнозу тенденцій розвитку об'єкта, до керуючої нейронної мережі. Вихід керуючої нейронної мережі під'єднаний до об'єкта керування і до блока історії роботи системи. Вейвлетний аналізатор під'єднаний до блока бази знань. Виходи блока бази знань під'єднані до нейронної мережі з самонавчанням і до блока правил самонавчання. Вихід блока прогнозу тенденцій розвитку об'єкта під'єднаний до блока коригування самомодифікації. Вихід блока коригування самомодифікації під'єднаний до керуючої нейронної мережі. Запропонована система (див. креслення) містить об'єкт керування 1, виходи станів та дій якого з'єднані з блоком коефіцієнтів ефективності 2, блоком історії роботи системи 5, керуючою нейронною мережею 6, вейвлетним аналізатором 7. Вихід блока коефіцієнтів ефективності 2 під'єднаний до входу нейронної мережі з самонавчанням 3 і до вейвлетного аналізатора 7. Вихід нейронної мережі з самонавчанням 3 з'єднаний з блоком правил самонавчання 4. Вихід блока правил самонавчання 4 зв'язаний з блоком історії роботи системи 5, вихід якого під'єднаний до нейронної мережі з самонавчанням 3, до блока правил самонавчання 4, до блока прогнозу тенденцій розвитку об'єкта 9 та до керуючої нейронної мережі 6. Вихід керуючої нейронної мережі 6 під'єднаний до об'єкта керування 1 і до блока історії роботи системи 5. Вейвлетний аналізатор 7 під'єднаний до блока бази знань 8. Виходи блока бази знань 8 під'єднані до нейронної мережі з самонавчанням 3 і до блока правил самонавчання 4. Вихід блока прогнозу тенденцій розвитку об'єкта 9 під'єднаний до блока коригування самомодифікації 10. Вихід блока коригування самомодифікації 10 під'єднаний до керуючої нейронної мережі 6. Запропонований інтелектуальний контролер з нейронною мережею працює наступним чином. Інформація про поточний стан та поточну дії об'єкта керування 1 надходить на блок коефіцієнтів ефективності 2, на блок історії роботи системи 5, на вхід керуючої нейронної мережі 6 та вейвлетний аналізатор 7. В блоці коефіцієнтів ефективності 2 визначається ефективність функціонування об'єкта керування 1 в поточний час і здійснюється оцінка змінювання тенденції ефективності. У випадку, коли відбувається зниження ефективності або коли вона є низькою, за сигналом від блока коефіцієнтів ефективності 2 вейвлетним аналізатором 7 проводиться оцінка особливостей поведінки об'єкта керування 1. Виявлені особливості поведінки об'єкта керування 1 на основі знань, які зберігаються в блоці бази знань 8 і оцінки ефективності, здійснюваній в блоці коефіцієнтів ефективності 2, приводять до змінювання параметрів самонавчання нейронної мережі з самонавчанням 3, а також до змінювання правил в блоці правил самонавчання 4. Результати самонавчання в нейронній мережі з самонавчанням 3 здійснюють модифікацію правил самонавчання в блоці правил самонавчання 4, які формують параметри блока історії роботи системи 5. Блок історії роботи системи 5 на основі інформації про стан та дії об'єкта керування 1 та управляючих дій, що надходять на об'єкт керування 1 згідно з правилами, які сформовані в блоці правил самонавчання 4, надає необхідну інформацію для навчання нейронної мережі 3 та керуючої нейронної мережі 6, а також забезпечує модифікацію правил в блоці правил самонавчання 4 і створює умови для формування прогнозу тенденцій розвитку об'єкта в блоці 9, який дозволяє скоригувати в блоці коригування самомодифікації 10 правила навчання в керуючій нейронній мережі 6. Керуюча нейронна мережа 6 здійснює подання керуючих дії на об'єкт керування 1. 1 UA 120728 U Технічний результат корисної моделі полягає у підвищенні якості та швидкодії керування за рахунок виявлення особливостей поведінки об'єкта керування та розширення можливостей навчання нейронних мереж. 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Інтелектуальний контролер з нейронною мережею, що містить об'єкт керування, виходи станів та дій якого з'єднані із блоком коефіцієнтів ефективності, блоком історії роботи системи і керуючою нейронною мережею, а вихід блока коефіцієнтів ефективності зв'язаний з нейронною мережею із самонавчанням, вихід якої під'єднаний до входу блока правил самонавчання, що має зв'язок із блоком історії роботи системи, який зв'язаний із мережею з самонавчанням і блоком правил самонавчання та з керуючою нейронною мережею, вихід якої під'єднаний до входу об'єкта керування і до блока історії роботи системи, який відрізняється тим, що додатково містить вейвлетний аналізатор, блок бази знань, блок прогнозу тенденцій розвитку об'єкта, блок коригування самомодифікації, а вихід блока коефіцієнтів ефективності під'єднаний до вейвлетного аналізатора, з'єднаного з блоком бази знань, вихід якого під'єднаний до нейронної мережі з самонавчанням і до блока правил самонавчання, а вихід блока історії роботи системи зв'язаний з блоком прогнозу тенденцій розвитку об'єкта, вихід якого під'єднаний до блока коригування самомодифікації, що має зв'язок із управляючою нейронною мережею. Комп’ютерна верстка М. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G06N 3/02, G05B 13/02
Мітки: інтелектуальний, нейронною, контролер, мережею
Код посилання
<a href="https://ua.patents.su/4-120728-intelektualnijj-kontroler-z-nejjronnoyu-merezheyu.html" target="_blank" rel="follow" title="База патентів України">Інтелектуальний контролер з нейронною мережею</a>
Система управління телекомунікаційною мережею
Номер патенту: 82963
Опубліковано: 27.08.2013
Автор: Савченко Аліна Станіславівна
МПК: H04L 12/70
Мітки: телекомунікаційною, система, мережею, управління
Формула / Реферат:
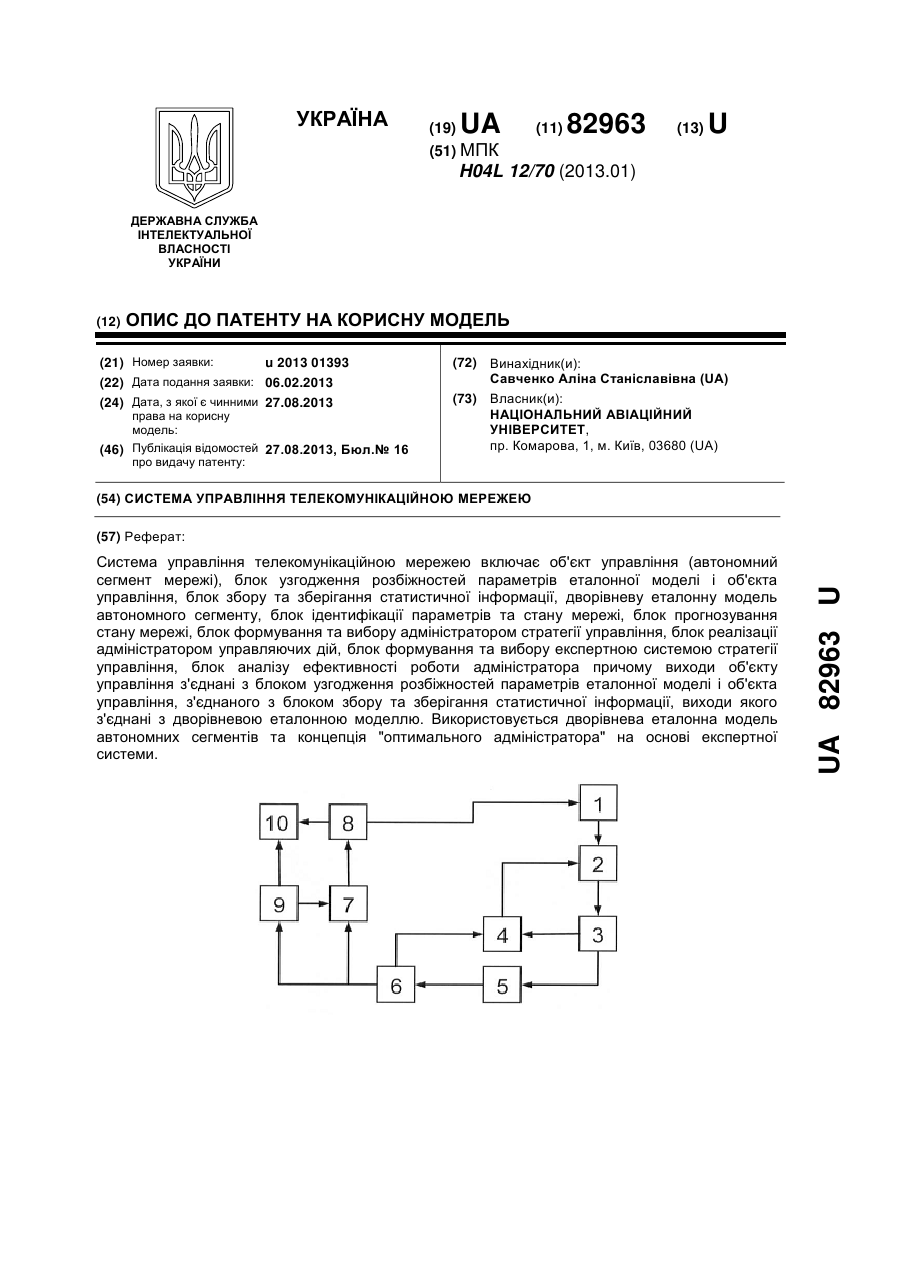
Система управління телекомунікаційною мережею включає об'єкт управління (автономний сегмент мережі), блок узгодження розбіжностей параметрів еталонної моделі і об'єкта управління, блок збору та зберігання статистичної інформації, дворівневу еталонну модель автономного сегменту, блок ідентифікації параметрів та стану мережі, блок прогнозування стану мережі, блок формування та вибору адміністратором стратегії управління, блок реалізації...
Система адаптивного керування інформаційною безпекою
Номер патенту: 119265
Опубліковано: 25.09.2017
Автор: Баришев Юрій Володимирович
МПК: G05B 13/00
Мітки: керування, безпекою, система, інформаційною, адаптивного
Формула / Реферат:
Система адаптивного керування інформаційною безпекою, що містить об'єкт керування, з'єднаний з блоком визначення експертних знань, редактор системи правил висновування, блок отримування чітких вхідних даних, вхід якого є виходом об'єкта керування, а його виходи, як і виходи блока визначення експертних знань, з'єднані з блоком перетворення вхідної інформації, а також блок виконання, яка відрізняється тим, що в неї введено нейронну мережу,...
Пристрій для автоматичного керування п’ятипровідною електричною мережею

Номер патенту: 65783
Опубліковано: 12.12.2011
Автор: Мірошник Олександр Олександрович
МПК: H02J 3/26
Мітки: п'ятипровідною, мережею, керування, електричною, автоматичного, пристрій
Формула / Реферат:
Пристрій для автоматичного керування п'ятипровідною електричною мережею, що містить три фазних проводи А, В і С, провід вуличного освітлення D, нульовий провід N, фотодатчик, семістори, лампи освітлення, причому перший семістор з'єднує нульовий провід N з проводом вуличного освітлення D, другий семістор з'єднує фазу С та провід вуличного освітлення D, лампи освітлення приєднані до проводу вуличного освітлення D та нульового N проводу, який...
Пристрій для автоматичного керування п’ятипровідною електричною мережею
Номер патенту: 97079
Опубліковано: 26.12.2011
Автор: Мірошник Олександр Олександрович
МПК: H02J 3/26
Мітки: мережею, автоматичного, пристрій, п'ятипровідною, керування, електричною
Формула / Реферат:
Пристрій для автоматичного керування п'ятипровідною електричною мережею, що містить три фазних проводи А, В і С, провід вуличного освітлення D, нульовий провід N, фотодатчик, симістори, лампу освітлення, причому перший симістор з'єднує нульовий провід N з проводом вуличного освітлення D, другий симістор з'єднує фазу С та провід вуличного освітлення D, лампа освітлення приєднана до проводу вуличного освітлення D та нульового N проводу, який...
Спосіб бездротового зв’язку між першою мережею та другою мережею
Номер патенту: 83485
Опубліковано: 25.07.2008
Автори: Коллінз Брюс, Джаін Нікхіл
МПК: H04M 1/66
Мітки: першою, зв'язку, другою, мережею, бездротового, спосіб
Формула / Реферат:
Спосіб бездротового зв'язку між першою мережею й другою мережею, який дає можливість мобільній станції (MS), абонованій в першій мережі, здійснювати зв'язок, використовуючи другу мережу, який містить:- зберігання ідентифікатора мобільної станції;- одержання інформації автентичності від першої мережі в загальному глобальному шлюзі;- використання алгоритму, що використовує інформацію автентичності для синтезу ключа...
Попередній патент: Біодеградабельна їстівна плівка для харчових продуктів
Наступний патент: Цукерки кристалічної структури з низьким показником глікемічності