G06N 3/02 — використовують моделі нейронних мереж
Інтелектуальний контролер з нейронною мережею
Номер патенту: 120728
Опубліковано: 10.11.2017
Автори: Кишенько Василь Дмитрович, Ладанюк Анатолій Петрович, Рачіпа Максим Сергійович, Циганенко Василь Володимирович
МПК: G05B 13/02, G06N 3/02
Мітки: мережею, контролер, інтелектуальний, нейронною
Формула / Реферат:
Інтелектуальний контролер з нейронною мережею, що містить об'єкт керування, виходи станів та дій якого з'єднані із блоком коефіцієнтів ефективності, блоком історії роботи системи і керуючою нейронною мережею, а вихід блока коефіцієнтів ефективності зв'язаний з нейронною мережею із самонавчанням, вихід якої під'єднаний до входу блока правил самонавчання, що має зв'язок із блоком історії роботи системи, який зв'язаний із мережею з...
Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням
Номер патенту: 111027
Опубліковано: 10.03.2016
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/08, B63H 21/21, B63H 25/42 ...
Мітки: система, керування, регулятора, передбаченням, апарата, підводного, автоматичного, базі, руху, швидкістю
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу,...
Система автоматичного керування просторовим рухом підводного апарата

Номер патенту: 110447
Опубліковано: 25.12.2015
Автор: Блінцов Сергій Володимирович
МПК: B63H 21/21, B63G 8/08, B63H 25/42 ...
Мітки: підводного, рухом, автоматичного, система, керування, апарата, просторовим
Формула / Реферат:
Система автоматичного керування просторовим рухом підводного апарата, яка містить задавач вхідного сигналу, датчик горизонтальної та датчик кутової швидкості руху, зв'язані з корпусом підводного апарата, датчики частоти обертання лівого і правого гребних гвинтів, зв'язані з відповідними гвинтами, перший канал виконавчого механізму, що об'єднує послідовно з'єднані перший силовий перетворювач, перший електродвигун та лівий гребний гвинт,...
Система автоматичного керування швидкістю руху підводного апарата на базі штучних нейронних мереж з еталонною моделлю
Номер патенту: 110179
Опубліковано: 25.11.2015
Автор: Блінцов Сергій Володимирович
МПК: B63H 21/21, G05B 13/00, G05D 1/02 ...
Мітки: штучних, автоматичного, руху, підводного, еталонною, апарата, нейронних, керування, моделлю, швидкістю, базі, система, мереж
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі штучних нейронних мереж з еталонною моделлю, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун з гребним гвинтом, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки...
Система автоматичного керування швидкістю руху підводного апарата на базі narma-l2 ругулятора
Номер патенту: 110178
Опубліковано: 25.11.2015
Автор: Блінцов Сергій Володимирович
МПК: B63H 21/21, B63H 25/42, B63G 8/08 ...
Мітки: автоматичного, базі, керування, апарата, ругулятора, система, швидкістю, narma-l2, підводного, руху
Формула / Реферат:
Система автоматичного керування швидкістю руху підводного апарата на базі NARMA-L2 регулятора, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок затримки вихідного сигналу, зв'язаний з першим...
Комбінована система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням та narma-l2-совітником
Номер патенту: 110082
Опубліковано: 10.11.2015
Автор: Блінцов Сергій Володимирович
МПК: B63G 8/08, B63H 21/21, B63H 25/42 ...
Мітки: руху, автоматичного, підводного, система, регулятора, передбаченням, базі, керування, швидкістю, комбінована, narma-l2-совітником, апарата
Формула / Реферат:
Комбінована система автоматичного керування швидкістю руху підводного апарата на базі регулятора з передбаченням та NARMA-L2-совітником, яка містить задавач вхідного сигналу, датчик швидкості, послідовно з'єднані силовий перетворювач, електродвигун, гребний гвинт, а також підводний апарат як об'єкт керування, яка відрізняється тим, що до неї додатково введено перший блок затримки вихідного сигналу, зв'язаний з датчиком швидкості, другий блок...
Спосіб ідентифікації відхилення зовнішніх навантажень від номінальних значень за допомогою спостереження за деформаціями

Номер патенту: 99460
Опубліковано: 10.06.2015
Автори: Пацюк Анатолій Григорович, Гук Наталія Анатоліївна, Полішко Олексій Миколайович, Ободан Наталія Іллівна
МПК: G06N 7/02, G06N 3/02
Мітки: номінальних, спосіб, допомогою, спостереження, деформаціями, навантажень, значень, зовнішніх, ідентифікації, відхілення
Нейронна мережа “min_1″
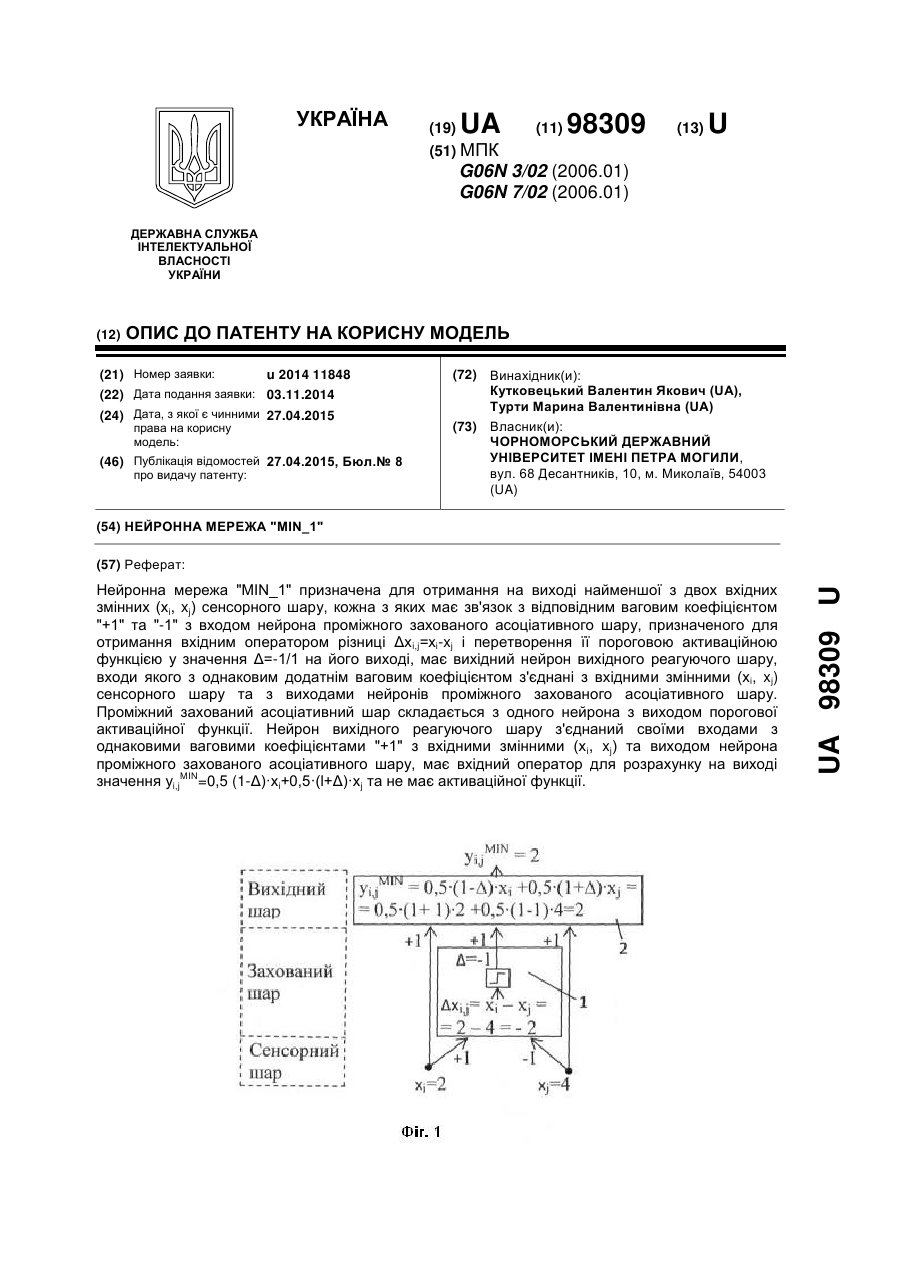
Номер патенту: 98309
Опубліковано: 27.04.2015
Автори: Кутковецький Валентин Якович, Турти Марина Валентинівна
МПК: G06N 3/02, G06N 7/02
Мітки: мережа, нейронна, min_1
Формула / Реферат:
Нейронна мережа, яка призначена для отримання на виході найменшої з двох вхідних змінних (хi, xj) сенсорного шару, кожна з яких має зв'язок з відповідним ваговим коефіцієнтом "+1" та "-1" з входом нейрона проміжного захованого асоціативного шару, призначеного для отримання вхідним оператором різниці Δхi,j=хi-xj і перетворення її пороговою активаційною функцією у значення Δ=-1/1 на його виході, має вихідний...
Нейронна мережа “min_0″
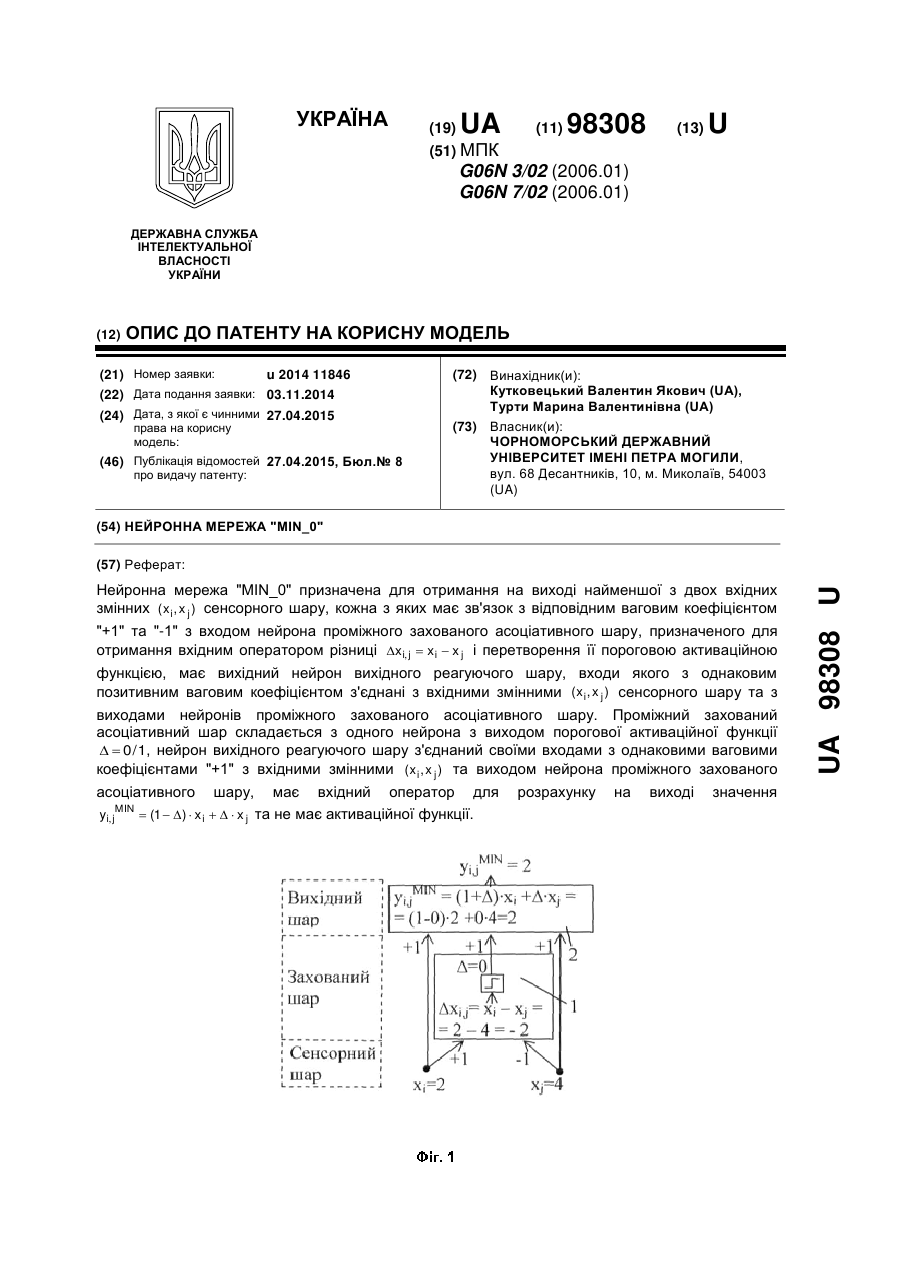
Номер патенту: 98308
Опубліковано: 27.04.2015
Автори: Кутковецький Валентин Якович, Турти Марина Валентинівна
МПК: G06N 7/02, G06N 3/02
Мітки: нейронна, min_0, мережа
Формула / Реферат:
Нейронна мережа "MIN_0", яка призначена для отримання на виході найменшої з двох вхідних змінних сенсорного шару, кожна з яких має зв'язок з відповідним ваговим коефіцієнтом "+1" та "-1" з входом нейрона проміжного захованого асоціативного шару, призначеного для отримання вхідним оператором різниці
Нейронна мережа “max_0″
Номер патенту: 97940
Опубліковано: 10.04.2015
Автори: Кутковецький Валентин Якович, Турти Марина Валентинівна
МПК: G06N 3/02, G06N 7/02
Мітки: нейронна, мережа, max_0
Формула / Реферат:
Нейронна мережа "МАХ_0", що призначена для отримання на виході найбільшої з двох вхідних змінних (хi, xj) сенсорного шару, кожна з яких має зв'язок з відповідним ваговим коефіцієнтом "+1" та "-1" з входом нейрона проміжного захованого асоціативного шару, призначеного для отримання вхідним оператором різниці Dхi,j=xi-xj і перетворення її пороговою активаційною функцією, має вихідний нейрон вихідного реагуючого...
Нечітка нейронна мережа

Номер патенту: 97763
Опубліковано: 10.04.2015
Автори: Турти Марина Валентинівна, Кутковецький Валентин Якович
МПК: G06N 7/02, G06N 3/02
Мітки: мережа, нейронна, нечітка
Формула / Реферат:
Нечітка нейронна мережа з прямим розповсюдженням сигналів, призначена для моделювання деякої функціональної залежності Υ(x1, x2, …, xj, …, xn), з нечіткими множинами, розміщеними вздовж осей входу xj та виходу Y, кожна з яких має лінгвістичну назву і функцію належності, яка монотонно змінюється у межах від "0" до "1" у діапазоні значень нечіткої множини, яка відрізняється тим, що як нечітка множина враховується її...