Пристрій управління зі стабілізацією точки гальмування в перехідному режимі
Номер патенту: 122211
Опубліковано: 26.12.2017
Автори: Смірнов Володимир Вікторович, Смірнова Наталія Володимирівна
Формула / Реферат
Пристрій управління зі стабілізацією точки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з входом блока порівняння, релейного елемента, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з об'єктом управління, диференціатора, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком вибірки-зберігання, вхід якого з'єднаний з виходом диференціатора, а вихід - з коректором, один вхід якого з'єднаний з виходом блока вибірки-зберігання, другий - з джерелом впливу, що задається, а вихід з'єднаний з суматором, який відрізняється тим, що додатково введений статистичний блок, вхід якого з'єднаний з виходом блока вибірки-зберігання, а вихід - з коректором.
Текст
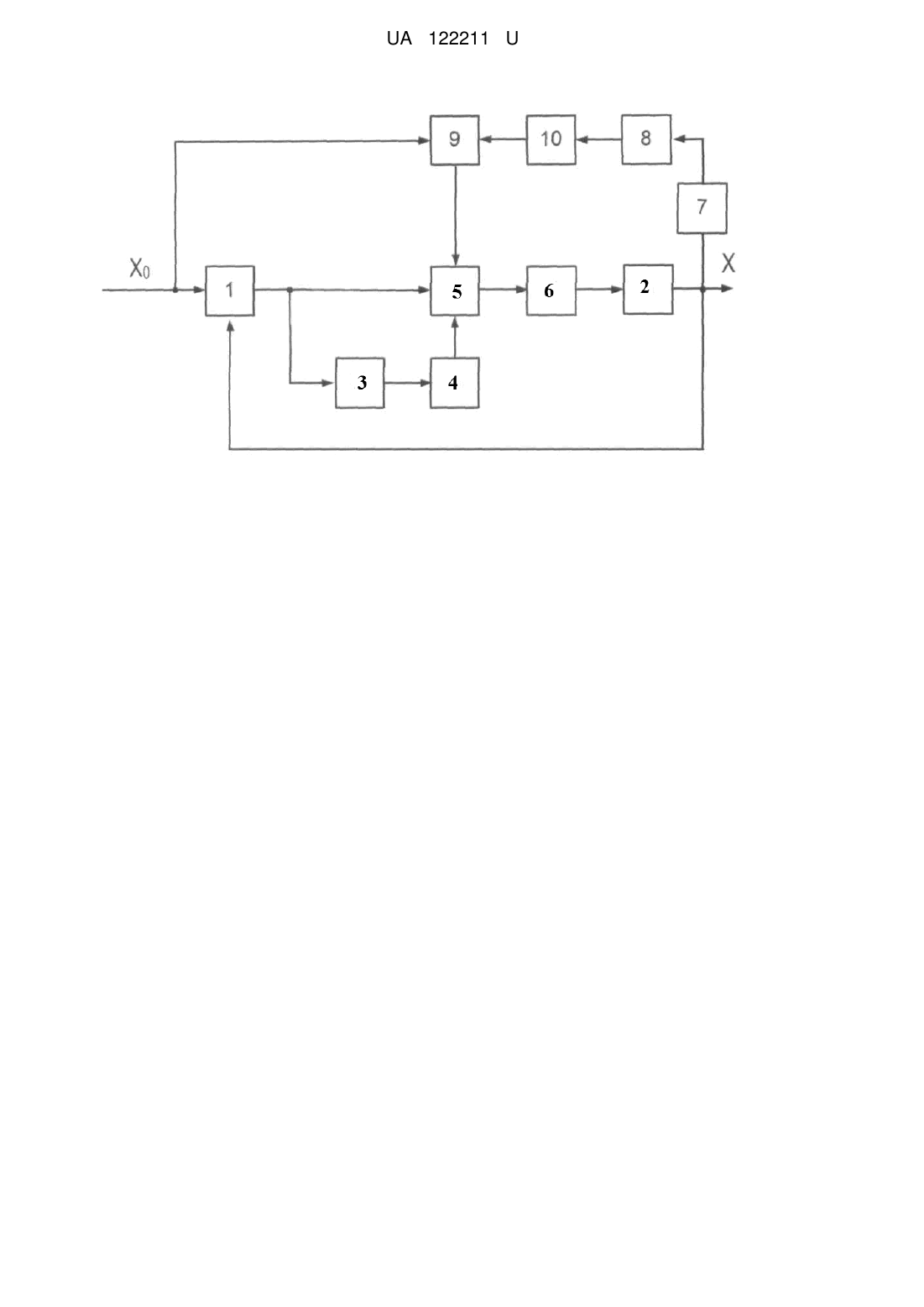
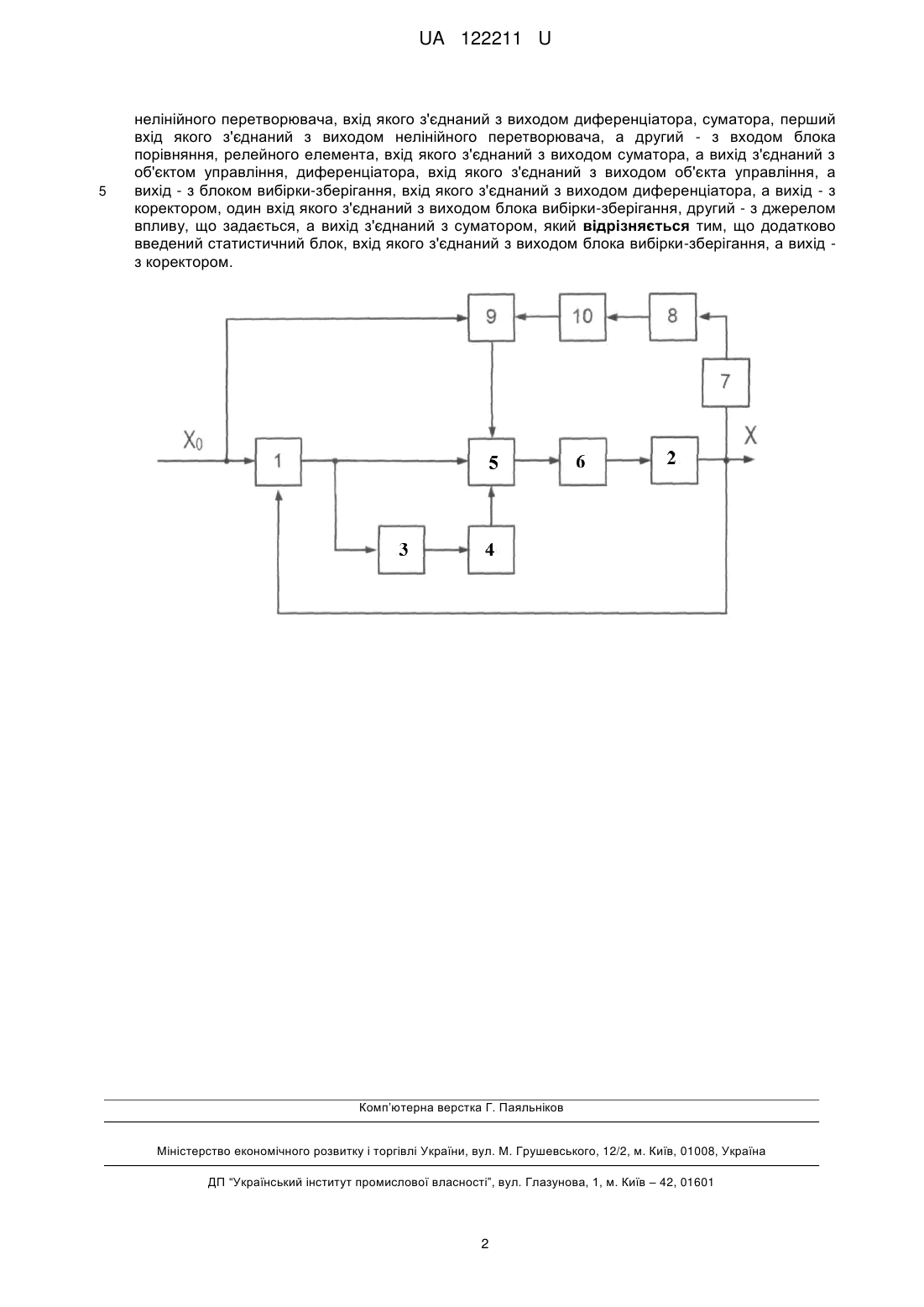
Реферат: Пристрій управління зі стабілізацією точки гальмування в перехідному режимі складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з входом блока порівняння, релейного елемента, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з об'єктом управління, диференціатора, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком вибірки-зберігання, вхід якого з'єднаний з виходом диференціатора, а вихід - з коректором, один вхід якого з'єднаний з виходом блока вибірки-зберігання, другий - з джерелом впливу, що задається, а вихід з'єднаний з суматором. Додатково введений статистичний блок, вхід якого з'єднаний з виходом блока вибірки-зберігання, а вихід - з коректором. UA 122211 U (54) ПРИСТРІЙ УПРАВЛІННЯ ЗІ СТАБІЛІЗАЦІЄЮ ТОЧКИ ГАЛЬМУВАННЯ В ПЕРЕХІДНОМУ РЕЖИМІ UA 122211 U UA 122211 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі приладобудування і може бути використана в системах автоматичного управління (САУ) технічними об'єктами і в системах автоматичного регулювання (CAP) параметрів технічних об'єктів різного призначення. Найбільш близьким до технічного рішення, що заявляється, є рішення, яке використовується в системах оптимального управління [1]. Недоліком цього рішення є нестабільність положення знайденої точки гальмування внаслідок впливу збурень на виході об'єкта управління. В основу корисної моделі поставлена задача, яка полягає у поліпшенні якості управління об'єктом за рахунок стабілізації розрахункового значення точки гальмування регулятора в перехідному режимі за рахунок зниження впливу збурень на результати визначення точки гальмування. Поставлена задача вирішується за рахунок того, що у відомий пристрій додатково введений статистичний блок, вхід якого з'єднаний з виходом блока вибірки-зберігання, а вихід - з коректором. На кресленні зображено схему пристрою, що пропонується. Пристрій складається з блока порівняння 1, перший вхід якого з'єднаний з джерелом впливу, що задається Х0, а другий - з виходом об'єкта управління 2, диференціатора 3, вхід якого з'єднаний з виходом блока порівняння 1, нелінійного перетворювача 4, вхід якого з'єднаний з виходом диференціатора 3, суматора 5, перший вхід якого з'єднаний з виходом нелінійного перетворювача 4, а другий - з входом блока порівняння 1, релейного елемента 6, вхід якого з'єднаний з виходом суматора 5, а вихід з'єднаний з об'єктом управління 2, диференціатора 7, вхід якого з'єднаний з виходом об'єктом управління 2, а вихід - з блоком вибірки-зберігання 8, статистичного блока 10, вхід якого з'єднаний з виходом блока вибірки-зберігання 8, коректора 9, один вхід якого з'єднаний з джерелом впливу, що задається Х0, другий – з виходом статистичного блока 10, а вихід з'єднаний з суматором 5. Пристрій працює наступним чином. На перший вхід блока порівняння 1 надходить значення впливу Х0, що задається, а на другий вхід - значення регульованого параметра X з виходу об'єкта управління 2. На виході блока порівняння 1 формується значення помилки відхилення, яке подається на вхід диференціатора 3. Диференціатор 3 формує величину відношення зміни значення помилки відхилення до інтервалу вимірювання, яка подається на вхід нелінійного перетворювача 4. Вихідне значення функції, обчислене нелінійним перетворювачем 4, надходить на другий вхід суматора 5. Значення на виході суматора 5 надходить на вхід релейного елемента 6, який здійснює перемикання рівня управляючого впливу від максимально позитивного значення до максимально від'ємного значення, яке надходить на вхід об'єкта управління 2. Диференціатор 7 визначає точку закінчення нелінійного ділянки характеристики розгону, значення якої фіксується в блоці вибірки-зберігання 8. Коректор 9 визначає значення точки гальмування, яка відповідає початку ділянки гальмування, шляхом віднімання від значення джерела впливу, що задається, Х0 значення на виході статистичного блока 10. Статистичний блок 10 перешкоджає впливу збурень з виходу об'єкта управління на процес визначення точки гальмування коректором 9. Поправка для визначення точки гальмування з виходу коректора 9 надходить на третій вхід суматора 5. Таким чином, в процесі управління об'єктом положення точки перемикання, відповідної початку ділянки гальмування, змінюється від розрахункового значення до реального значення в залежності від умов функціонування об'єкта управління і не залежить від впливу збурень з виходу об'єкта управління. Це дозволяє враховувати статичні і динамічні характеристики об'єкта управління, не визначені на початку траєкторії розгону. Нові ознаки дозволяють використовувати пристрій управління з оптимальним положенням та стабілізацією точки перемикання, відповідної початку ділянки гальмування, покращуючи динамічні характеристики системи управління оптимальної за швидкодією. Джерело інформації: 1. Пат. 112688 Україна, МПК (2016.01) G05B21/00, G05B1/00. Пристрій управління зі змінним значенням початку ділянки гальмування в перехідному режимі / В.В. Смірнов; заявник і власник патенту Кіровогр. нац. тех. ун-т. - № u 201606871, заявл. 23.06.2016; опубл. 26.12.2016, бюл. № 24. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Пристрій управління зі стабілізацією точки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, 1 UA 122211 U 5 нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з входом блока порівняння, релейного елемента, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з об'єктом управління, диференціатора, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком вибірки-зберігання, вхід якого з'єднаний з виходом диференціатора, а вихід - з коректором, один вхід якого з'єднаний з виходом блока вибірки-зберігання, другий - з джерелом впливу, що задається, а вихід з'єднаний з суматором, який відрізняється тим, що додатково введений статистичний блок, вхід якого з'єднаний з виходом блока вибірки-зберігання, а вихід з коректором. Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 21/00, G05B 1/00
Мітки: пристрій, гальмування, управління, режимі, стабілізацією, перехідному, точки
Код посилання
<a href="https://ua.patents.su/4-122211-pristrijj-upravlinnya-zi-stabilizaciehyu-tochki-galmuvannya-v-perekhidnomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Пристрій управління зі стабілізацією точки гальмування в перехідному режимі</a>
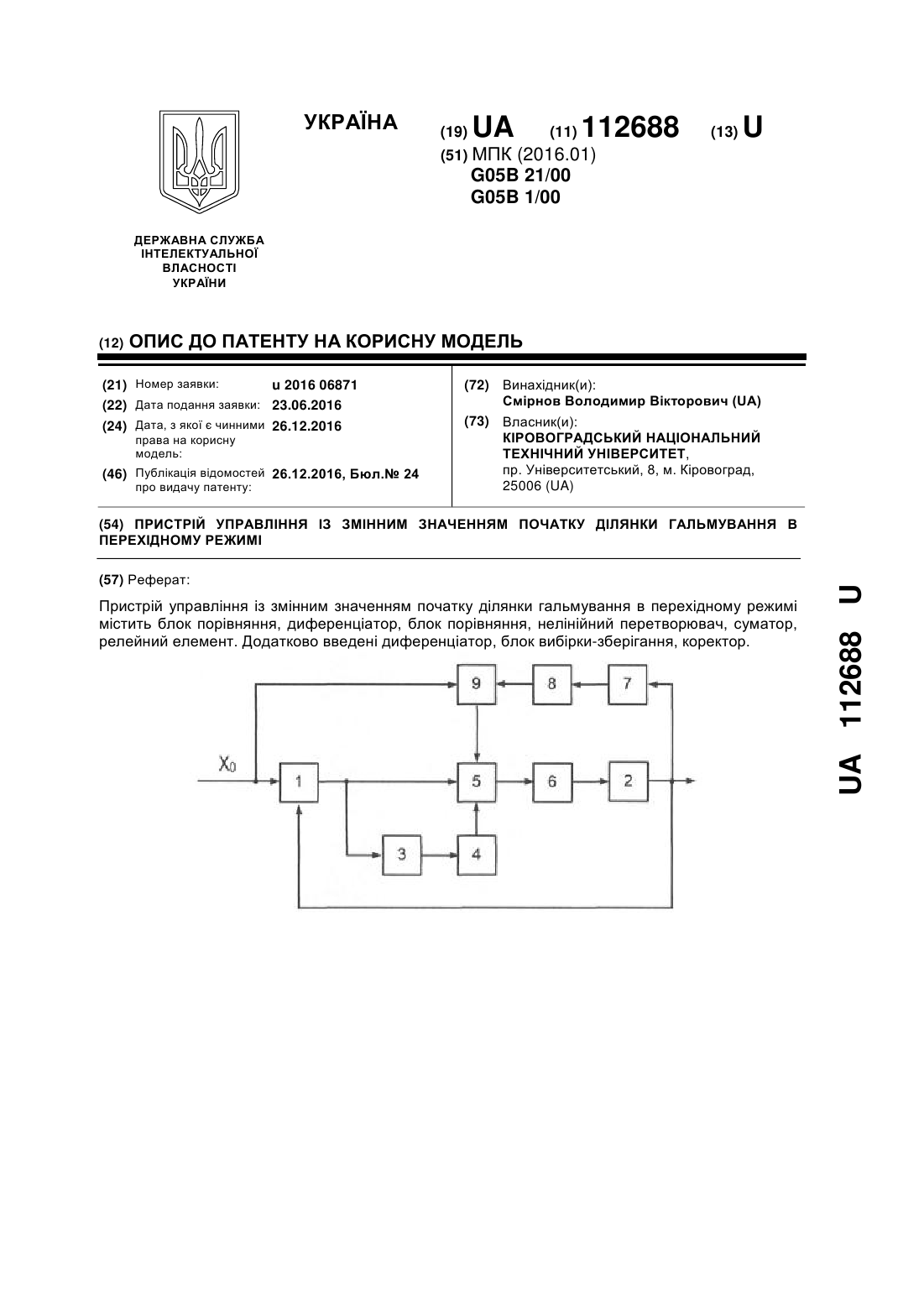
Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі
Номер патенту: 112688
Опубліковано: 26.12.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 21/00, G05B 1/00
Мітки: гальмування, управління, перехідному, ділянки, початку, змінним, режимі, пристрій, значенням
Формула / Реферат:
Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а...
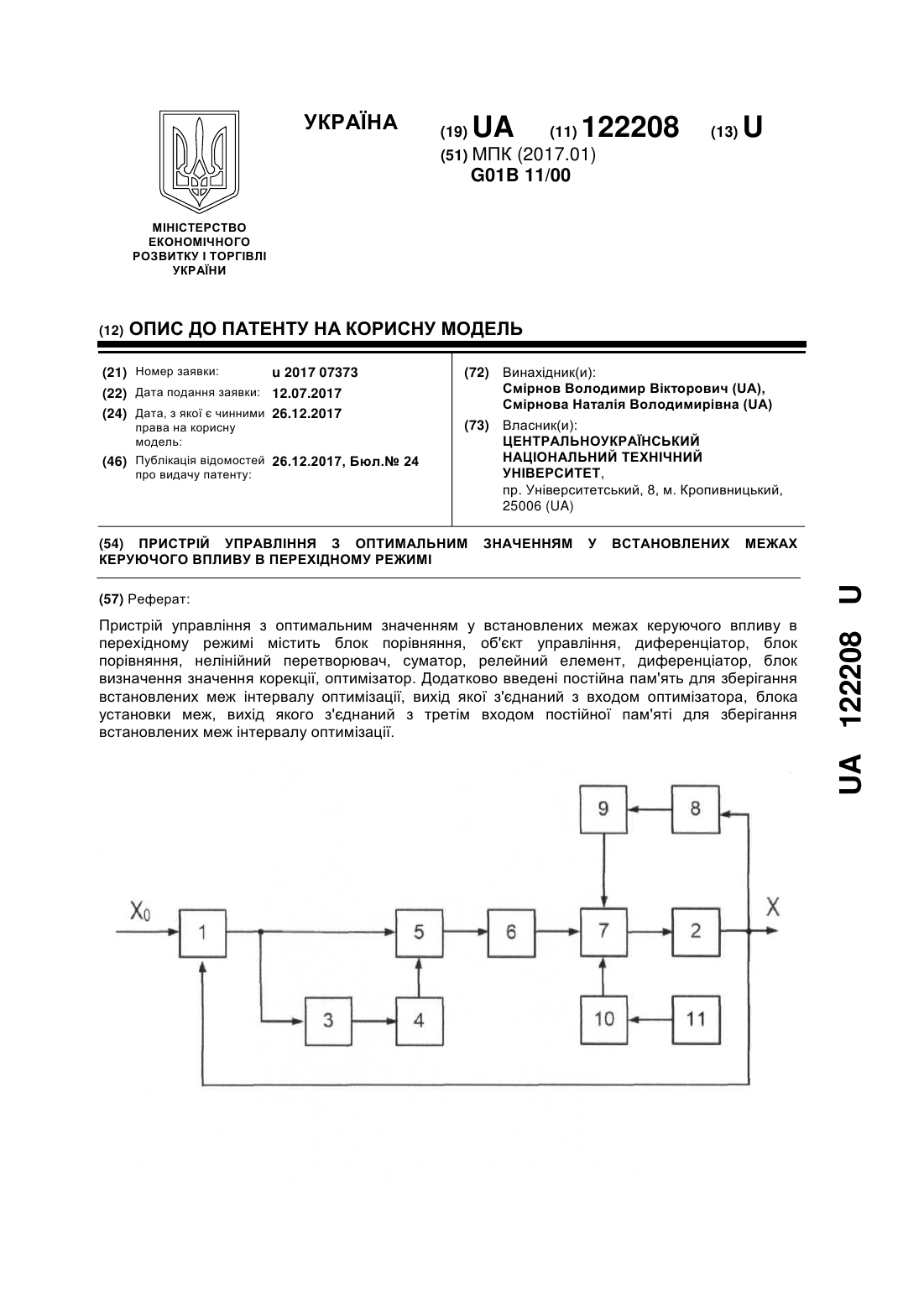
Пристрій управління з оптимальним значенням у встановлених межах керуючого впливу в перехідному режимі
Номер патенту: 122208
Опубліковано: 26.12.2017
Автори: Смірнова Наталія Володимирівна, Смірнов Володимир Вікторович
МПК: G01B 11/00
Мітки: перехідному, значенням, керуючого, оптимальним, режимі, пристрій, межах, управління, встановлених, впливу
Формула / Реферат:
Пристрій управління з оптимальним значенням у встановлених межах керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного...
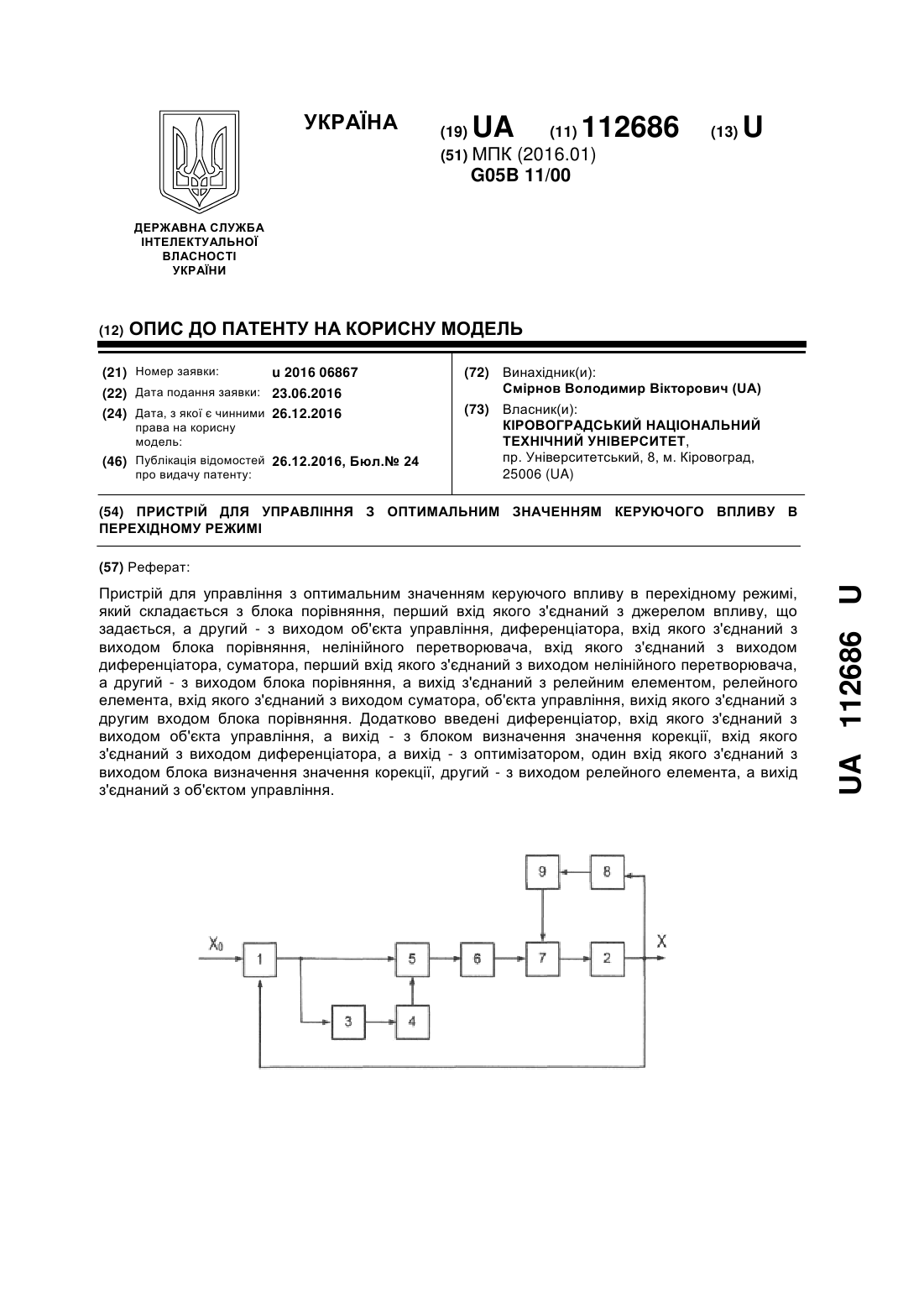
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі
Номер патенту: 112686
Опубліковано: 26.12.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 11/00
Мітки: впливу, режимі, пристрій, управління, перехідному, значенням, керуючого, оптимальним
Формула / Реферат:
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а...
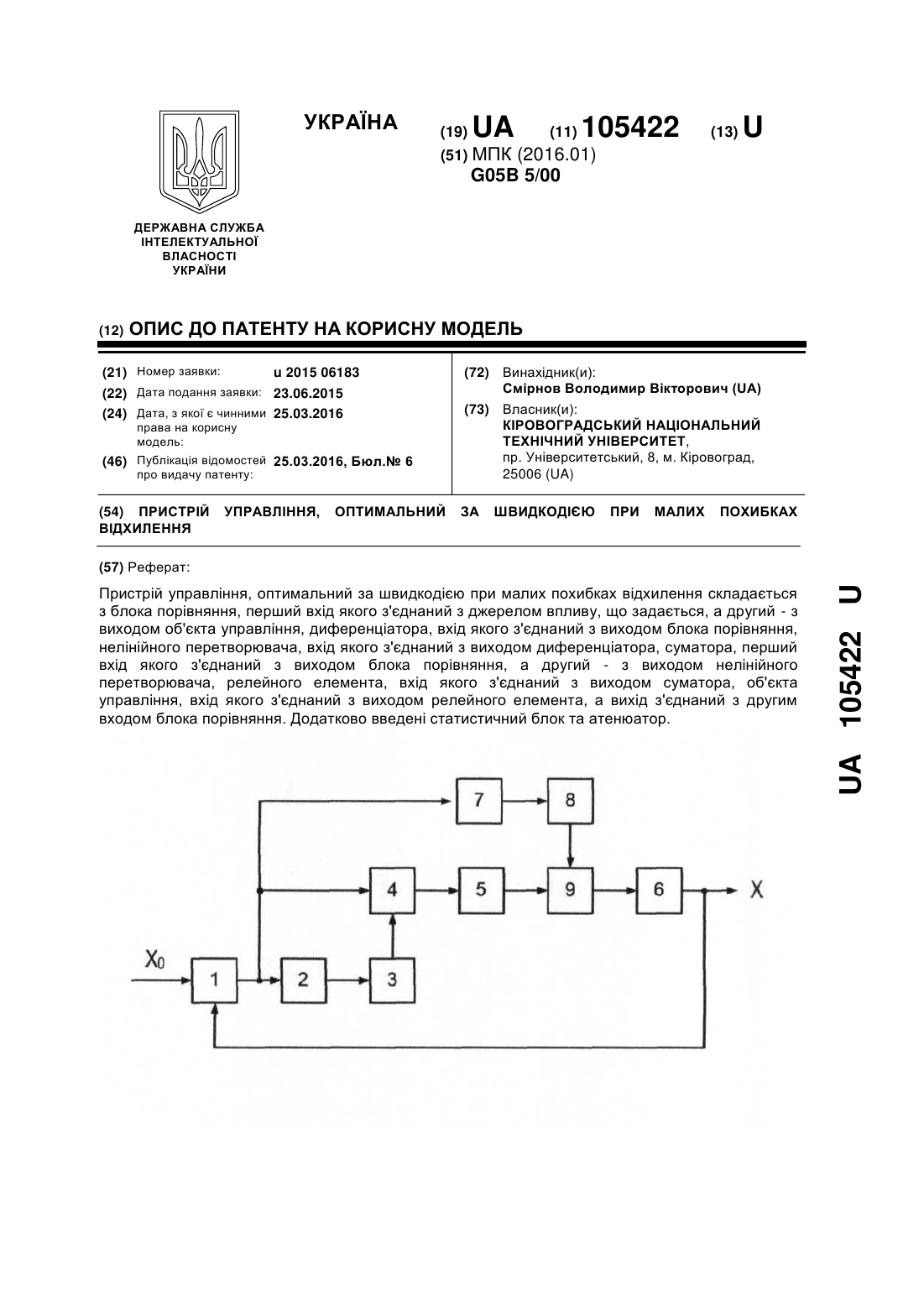
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення
Номер патенту: 105422
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: малих, пристрій, оптимальний, відхілення, похибках, управління, швидкодією
Формула / Реферат:
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом...
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють
Номер патенту: 105423
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: управління, швидкодією, впливів, збурюють, оптимальний, стійкий, короткочасних, пристрій
Формула / Реферат:
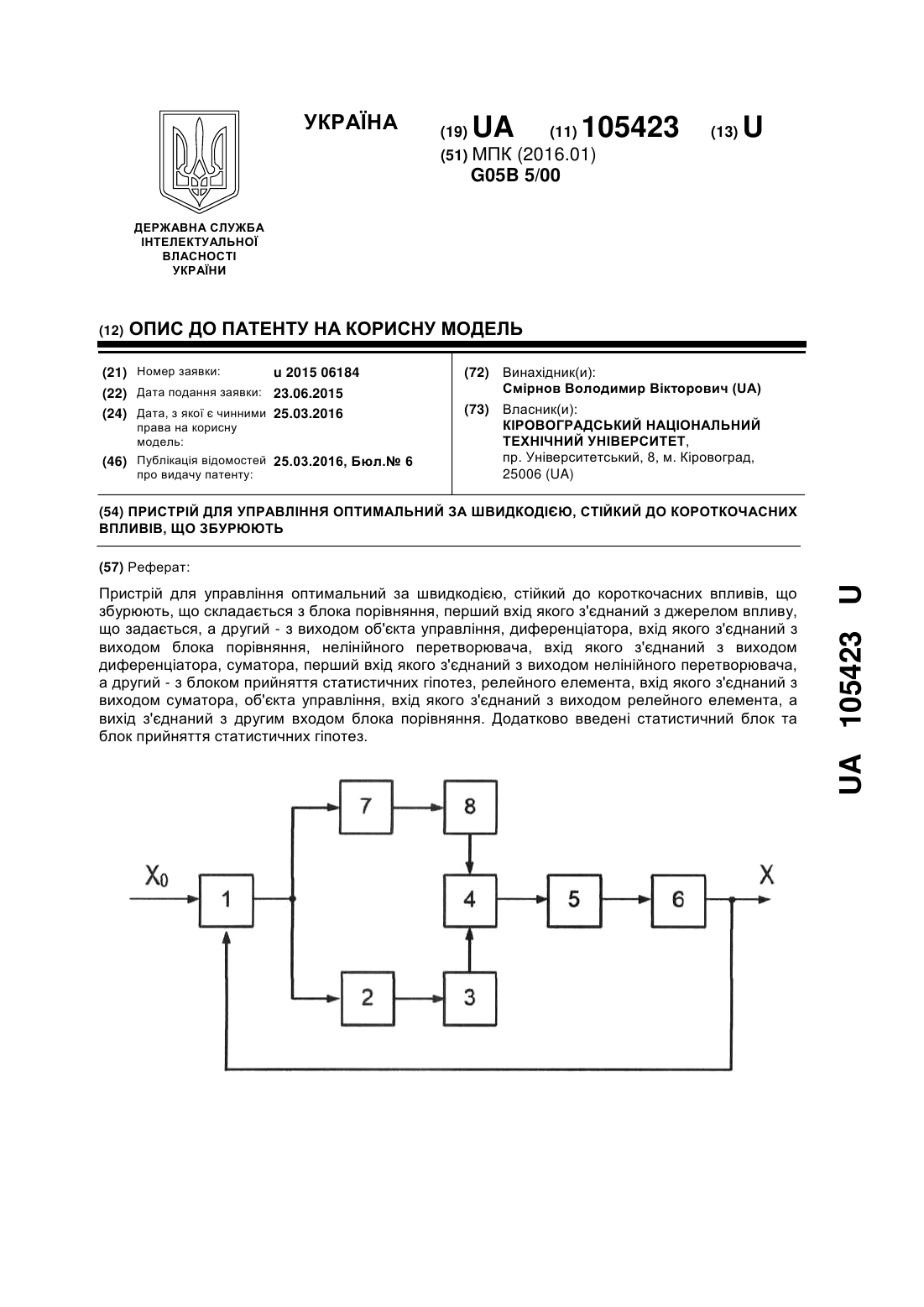
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного...
Попередній патент: Узв блочно-модульний водоочисний комплекс aqua-u-elion.9r
Наступний патент: Пристрій вибірки вимірювального інтервалу для визначення ваги об’єкта в умовах впливу збурень
Випадковий патент: Сушильний пристрій