Автомат для насікання надфілів
Номер патенту: 14285
Опубліковано: 25.04.1997
Автори: Бєліцкий Ігор Володимирович, Видрін Володимир Петрович, Бєліцкий Аркадій Володимирович
Формула / Реферат
1. Автомат для насекания надфилей, на станине которого установлены жестко закрепленный стол и с возможностью прямолинейного перемещения каретка, несущая ударное устройство, включающее корпус и размещенные в нем пресс-лапку и механизм автоматического управления энергией удара молотка, содержащий вал управления, при этом ударное устройство установлено с возможностью подъема и опускания посредством поворота корпуса вокруг горизонтальной оси от цилиндра, отличающийся тем, что, с целью расширения технологических возможностей, автомат снабжен введенным в ударное устройство механизмом управления усилием воздействия пресс-лапки на заготовку надфилей, выполненным в виде установленного на станине двуплечего рычага с опорой вращения, размещенной на конце штока цилиндра подъема и опускания ударного устройства, причем ось вращения опоры параллельна оси поворота корпуса ударного устройства ролика, закрепленного на корпусе с возможностью перемещения по одному плечу рычага, и груза, смонтированного на другом плече рычага, при этом в механизм управления энергией удара молотка введена кинематическая связь вала управления со станиной, представляющая собой зубчатую передачу, одно колесо которой расположено на валу управления, реечную передачу с расположением рейки в направлении перемещения каретки и винтовую пару, винт которой расположен на станине с возможностью вращения.
2. Автомат по п. 1, отличающийся тем, что ось другого колеса зубчатой передачи кинематической связи вала управления со станиной и ось реечного колеса реечной передачи совпадают с осью поворота ударного устройства.
Текст
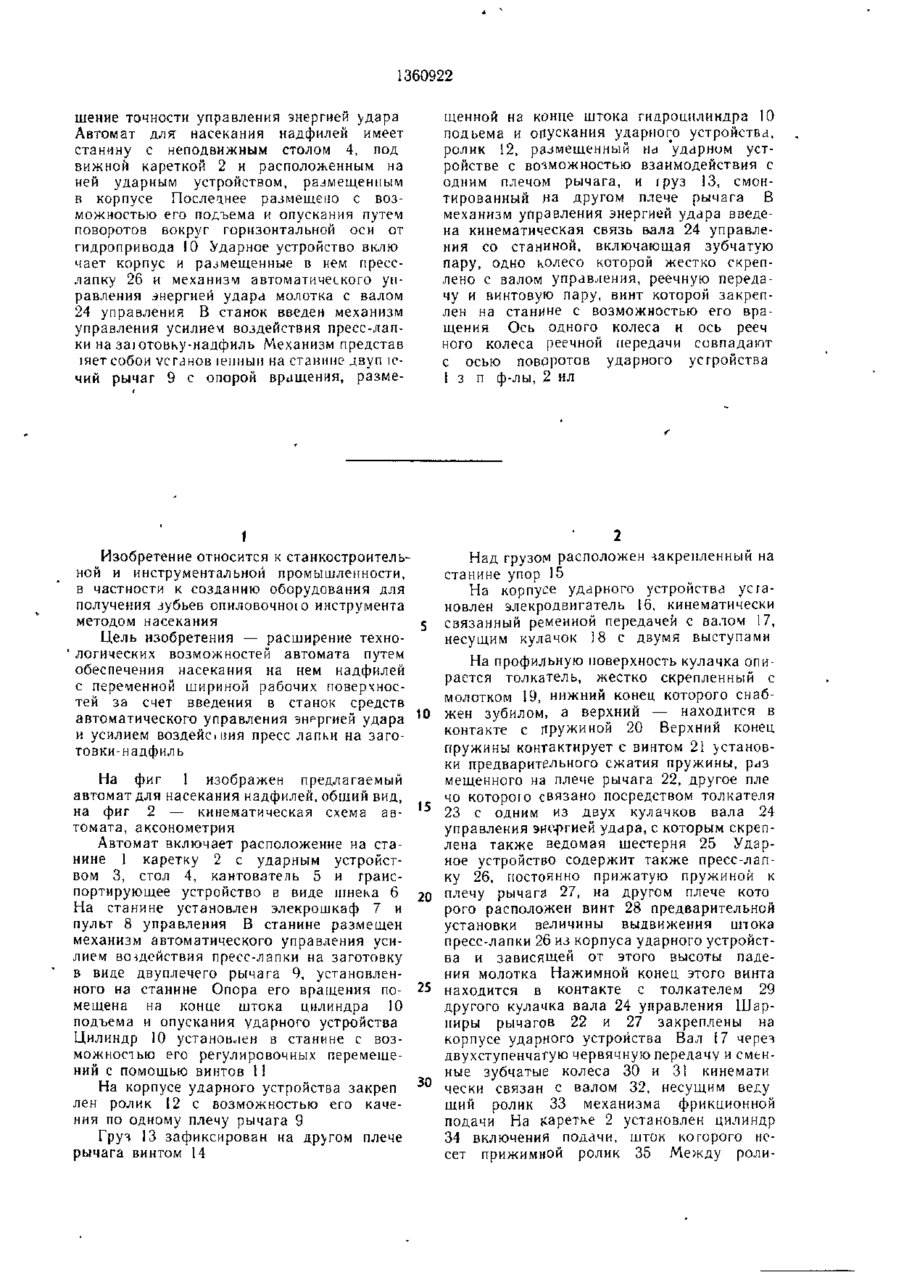
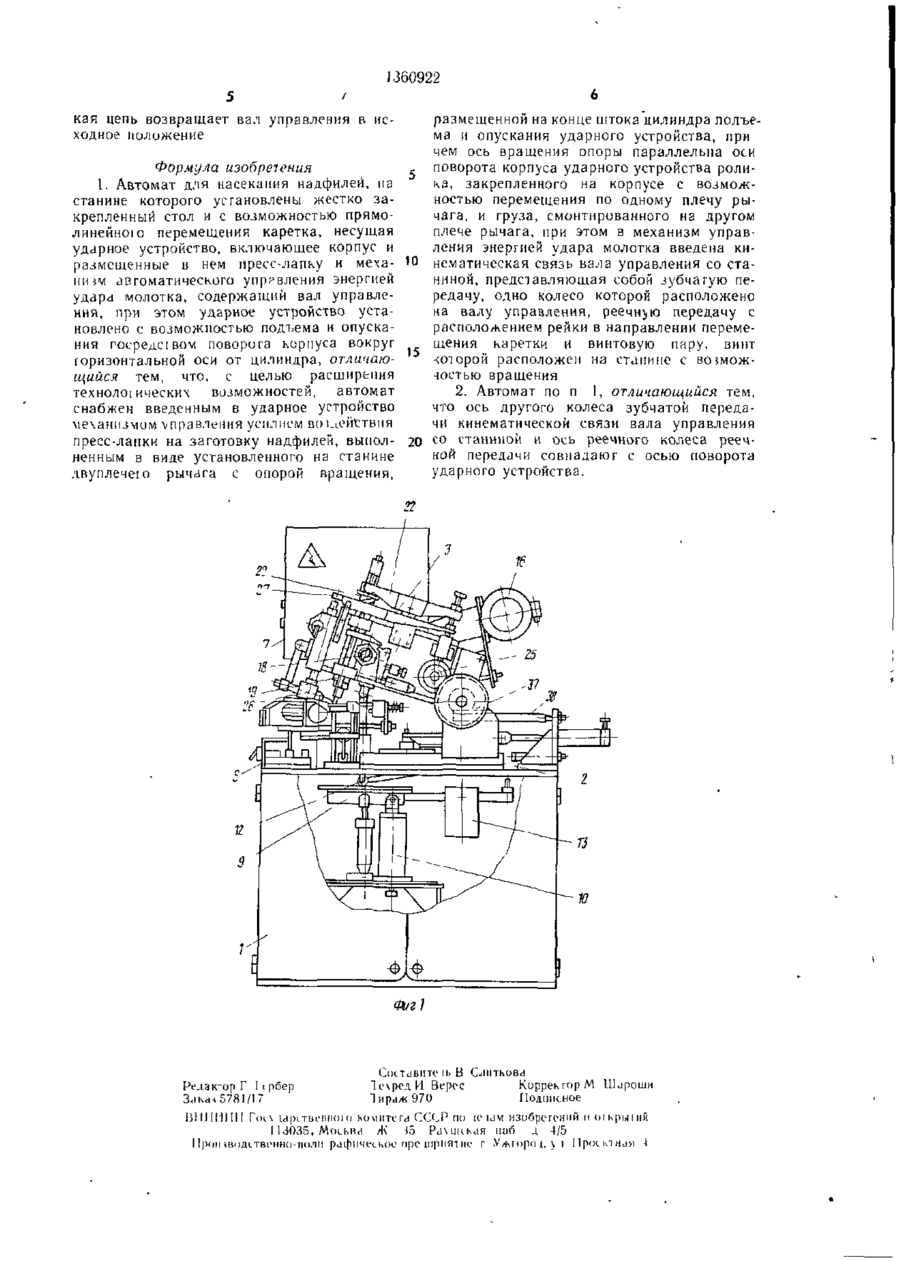
Изобретение относится к станкостроительной и инструментальной промышленности, в частности к созданию обор\дования для получения зубьев опиловоч ного инструмента методом насекания Цель изооретения — расширение технологических возможностей автомата путем обеспечения автоматического управления усилием воздействия пресс-лапки на заготовку и повы 19 22 18 ,16 23 29 (Л • 26 со о со к? Фиг. 2 1360922 шение точности управления энергией \дара Автомат для насекания надфилей имеет станину с неподвижным столом 4, под вижной кареткой 2 и расположенным на ней ударным устройством, размещенным в корпусе Последнее размещено с возможностью его подъема и опускания путем поворотов вокруг горизонтальной оси от гидропривода 10 Ударное устройство вклю чает корпус и размещенные в нем пресслапку 26 и механизм автоматического управления энергией удара молотка с валом 24 управления В станок введен механизм управления усилием воздействия пресс-лапки на заютовку-надфиль Механизм представ іяет собой установ ієнныи на станине двуп іечий рычаг 9 с опорой вращения, разме щенной на конце штока гидроцилиндра 10 подьема и опускания ударного устройства, ролик 12, размещенный H *уД а Р н о м У01" d ройстве с возможностью взаимодействия с одним плечом рычага, и і руз 13, смонтированный на другом плече рычага В механизм управления энергией удара введена кинематическая связь вала 24 управления со станиной, включающая зубчатую пару, одно колесо которой жестко скреплено с валом управления, реечную передачу и винтовую пару, винт которой закреплен на станине с возможностью его вращения Ось одного колеса и ось рееч ного колеса реечной передачи совпадают с осью поворотов ударного устройства 1 з п ф-лы, 2 ил t Изобретение относится к станкостроительной и инструментальной промышленности, в частности к созданию оборудования для получения зубьев опиловочноіо инструмента методом насекания 5 Цель изобретения — расширение технологических возможностей автомата путем обеспечения насекания на нем надфилей с переменной шириной рабочих поверхностей за счет введения в станок средств автоматического управления энергией удара 10 и усилием воздействия пресс лапки на заготовки-надфиль Над грузом расположен закрепленный на станине упор 15 На корпусе ударного устройства установлен элекродвигатель 16, кинематически связанный ременной передачей с валом 17, несущим кулачок 18 с двумя выступами На профильную поверхность кулачка опирается толкатель, жестко скрепленный с молотком 19, нижний конец которого снабжен зубилом, а верхний — находится в контакте с пружиной 20 Верхний конец пружины контактирует с винтом 21 \становки предварительного сжатия пружины, раз мещенного на плече рычага 22, другое пле На фиг 1 изображен предлагаемый чо которого связано посредством толкателя автомат для насекания надфилей, общий вид, 23 с одним из двух кулачков вала 24 на фиг 2 — кинематическая схема авуправления энергией удара, с которым скрептомата, аксонометрия лена также ведомая шестерня 25 УдарАвтомат включает расположение на станое устройство содержит также пресс-лапнине 1 каретку 2 с ударным устройстку 26, постоянно прижатую пружиной к вом 3, стол 4, кантователь 5 и транспортирующее устройство в виде шнека 6 20 плечу рычага 27, на другом плече кото рого расположен винт 28 предварительной На станине установлен элекрошкаф 7 и установки величины выдвижения цпока пульт 8 управления В станине размешен механизм автоматического управления усипресс-лапки 26 из корпуса ударного устройстлием воздействия пресс-лапки на заготовку ва и зависящей от этого высоты падев виде двуплечего рычага 9, установленния молотка Нажимной конец этого винта ного на станине Опора его вращения по- 25 находится в контакте с толкателем 29 мещена на конце штока цилиндра 10 другого кулачка вала 24 управления Шарподъема и опускания ударного устройства ниры рычагов 22 и 27 закреплены на Цилиндр 10 установлен в станине с возкорпусе ударного устройства Вал і 7 через можностью его регулировочных перемещедвухступенчатую червячную передачу и сменний с помощью винтов 11 ные зубчатые колеса 30 и 31 кинемати чески связан с валом 32, несущим ве;;у На корпусе ударного устройства закреп щий ролик 33 механизма фрикционной лен ролик 12 с возможностью его качеподачи На каретке 2 установлен цилиндр ния по одному плечу рычага 9 34 включения подачи, шток которого неГруз 13 зафиксирован на другом плече сет прижимной ролик 35 Между ролирычага винтом 14 1360922 обеспечивается вращением ведущею ролика ками размещена фрикционная планка 36, 33, необходимый шаг насечки устанавливаетскрепленная со станиной ся сменными колесами 30 и 31 Вал 24 управления кинематически связан 5 При опускании ударного механизма через блок 37 реечной и ведущей шеспресс-лапка 26 опускается на обрабатываетерен с зубчатой рейкой 38 и жестко мую заготовку и прижимает ее к столу, скрепленной с ней гайкой, в которую ввина упругая линейка 45 под действием носка чен винт 39, закрепленный на станине заготовки прогибается Во время возврас возможностью его вращения В ударном тов ударного механизма пружинная линеймеханизме установлен пневмоцилиндр 40 включения и выключения работы молотка. 10 ка приподнимает заготовку над столом, облегчая ее кантование или смену в позиВал 24 и блок 37 закреплены на корпусе ции обработки Линейка 45 контактирует с ударного механизма с возможностью их заготовкой в зоне технологического припусвращения, причем ось блока 37 совпадает с ка, отделяемого при последующих операциях. осью ведущего ролика 33, являющейся одновременно осью поворотов корпуса удар- 1 5 Действие механизма управления усиного механизма лием воздействия пресс-лапки на заготовку происходит следующим образом При возвраКаретка 2 скреплена со штоком ците ударного механизма шюк цилиндра 10 линдра 41 возврата, закреплена "О на ставыдвинут, ролик 12 катится по коромысл\ нине На станине закреплен привод шнев направлении к шарниру, груз 13 нахока, включающий цилиндр 42, кинематически связанный со шнеком 6 зубчато- 20 дится в контакте с упором Е5 После реечной передачей и храповым механизмом. возврата каретки в исходное положение шток Длина хода цилиндра 42 соответствует цилиндра втягивается, ось шарнира коромысполному обороту шнека. Шнек снабжен винла опускается до тех пор, пока пресстовой канавкой, в которой размещены лапка не зафиксирует заготовку на сголе хвостовики 43 заготовок. Параллельно оси Последующее опускание штока вызывает шнека расположена упорная линейка 44 На 25 прекращение контакта груза с упором станине закреплена упругая линейка 45, на которую оперты носки заготовок В стаВ начале рабочего хода ролик 12 нанине размещены пневмоаппараты системы ходится на установленном заранее расстояуправления и командоаппарат (не показаны) нии от оси шарнира Воздействие груза Действие механизмов автомата происхо- Зо на одно плечо коромысла вызывает воздит в такой последовательности- возврат действие другого плеча на ролик и ударкаретки с ударным механизмом в исходный механизм с установленной заранее ное положение, в это же время шнек разгружающей силой, вызывающей снижесовершает один полный оборот, что обесние усилия воздействия пресс-лапки на загопечивает перемещение на нем заготовок товку. При рабочем ходе расстояние ролика на один шаг канавки и смену заготовок 35 от шарнира увеличивается, поэтому постев позиции обработки; опускание ударного пенно изменяется соотношение п. и і коромысмеханизма, включение молотка для насела, результатом чего является постепенное кания первой стороны заготовки; выключеснижение разгружаемого усилия и увелиние молотка, подъем ударного механизчение силы воздействия пресс-лапки на ма, выключение подачи Цикл насекания заготовку После завершения рабочего хода первой стороны заготовки завершен При 4 0 шток цилиндра 10 выдвигается без подъема следующем возврате шнек не работает, ударного механизма, пока не поступит конвместо этого происходит кантование заготакт груза с упором После этого при товки для насекания ее следующей стороны дальнейшем выдвижении штока начинается Очередность работы шнека и кантователя подъем ударного механизма до исчеробусловлена числом сторон типа обрабатыпания хода штока цилиндра ваемых надфилей Механизм автоматического управления энергией удара работает следующим обраПоследовательность действия механизмов зом. В начале рабочего хода вал управавтомата обеспечивают пневмоцилиндры, ления находится в исходном угловом поуправляемые пневмоаппаратами релейной ложении В этом положении винтами 28 и 21 системы управления с жесткой логикой Ударный механизм работает следующим об- 50 предварительно установлены высота падения разом молотка и степень сжатия его пружины При движении подачи реечная шестерня Во время насекания кулачок 18, вракатится по зубчатой рейке 38, что вызыщаясь, через каждые полоборота поднимает вает вращение вала 24 управления с кумолоток 19 с закрепленным в нем зубилачками Кулачки через толкатели и рылом. При дальнейшем вращении кулачка его высгуп выходит из-под толкателя мо- 55 чаги сообщают соответственные приращелотка, и молоток под действием пружины ния сжатия пружины и высоты падения мои собственного веса опускается до тех пор, лотка, обуславливающие необходимое возпока лезвие зубила не произведет насечрастание энергии удара При возвратах ку на заготовке Непрерывная подача ударного механизма та же кинематичес 1360922 кая цепь возвращает вал управления в исходное положение размещенной на конце штока цилиндра подъема и опускания ударного устройства, при чем ось вращения опоры параллельна оси Формула изобретения поворота корпуса ударного устройства ролика, закрепленного на корпусе с возможI. Автомат для насекания надфилей, па ностью перемещения по одному плечу рыстанине которого установлены жестко зачага, и груза, смонтированного на другом крепленный стол и с возможностью прямоплече рычага, при этом в механизм управлинейною перемещения каретка, несущая ления энергией удара молотка введена киударное устройство, включающее корпус и размещенные в нем пресс-лапку и меха- 10 нематическая связь вала управления со станиной, представляющая собой зубчатую пенизм автоматического управления энергией редачу, одно колесо которой расположено удара молотка, содержащий вал управлена валу управления, реечную передачу с ния, при этом ударное устройство устарасположением рейки в направлении переменовлено с возможностью подъема и опускащения каретки и винтовую пару, винт ния гоередсівоч поворота корпуса вокруг 15 которой расположен на станине с возможгоризонтальной оси от цилиндра, отличаюностью вращения щийся тем, что, с целью расширения 2. Автомат по п I, отличающийся тем, технолої ических возможностей, автомат что ось другого колеса зубчатой передаснабжен введенным в ударное устройство чи кинематической связи вала управления механизмом \
ДивитисяДодаткова інформація
Назва патенту англійськоюApparatus for cutting needle files
Автори англійськоюBielitskyi Arkadii Volodymyrovych, Bielitskyi Ihor Volodymyrovych, Vydrin Volodymyr Petrovych
Назва патенту російськоюАвтомат для насекания надфилей
Автори російськоюБелицкий Аркадий Владимирович, Белицкий Игорь Владимирович, Выдрин Владимир Петрович
МПК / Мітки
МПК: B23D 73/00
Мітки: автомат, насікання, надфілів
Код посилання
<a href="https://ua.patents.su/4-14285-avtomat-dlya-nasikannya-nadfiliv.html" target="_blank" rel="follow" title="База патентів України">Автомат для насікання надфілів</a>
Автомат для насікання круглих надфілів
Номер патенту: 13392
Опубліковано: 28.02.1997
Автори: Семененко Валерій Олександрович, Видрін Володимир Петрович, Бєліцкий Аркадій Володимирович
МПК: B23D 73/00
Мітки: надфілів, автомат, насікання, круглих
Формула / Реферат:
(57) Автомат для насекания круглых надфилей, включающий установленную на станине с возможностью возвратно-поступательного перемещения каретку с размещенным в ней с возможностью вращения патроном для заготовки, наковальню, копирный механизм, расположенный в корпусе ударный механизм с пресс-лапкой, установленным с возможностью возвратно-поступательного перемещения молотком с зубилом и устройством для регулирования энергии удара молотка,...
Автомат для насікання надфілів
Номер патенту: 14286
Опубліковано: 25.04.1997
Автор: Бєліцкий Аркадій Володимирович
МПК: B23D 73/00
Мітки: надфілів, насікання, автомат
Формула / Реферат:
Автомат для насекания надфилей с установленной на станине кареткой, на которой с возможностью подъема и опускания расположен помещенный в корпусе ударный механизм, а для заготовки надфилей предусмотрены транспортирующее устройство с приводом в виде зубчато-реечного и храпового механизмов и кантователь, отличающийся тем, что, с целью повышения производительности при насекании плоских надфилей, в автомат введены кинематическая связь...
Автомат для виготовлення вафельних стаканчиків для морозива
Номер патенту: 13836
Опубліковано: 25.04.1997
Автори: Батурін Володимир Петрович, Калинкін Вадим Іванович, Оттиско Федір Федорович
МПК: A21B 5/00
Мітки: стаканчиків, автомат, вафельних, морозива, виготовлення
Формула / Реферат:
Автомат для изготовления вафельных стаканчиков для мороженого, содержащий ротор с планшайбой, по периметру которой расположены блок-формы, состоящие из двух полуформ, копир перемещения полуформ, конуса и механизм заливки теста, отличающийся тем, что автомат снабжен устройством для среза кромки стаканчика, выполненным в виде дискового ножа, установленного на кронштейне с возможностью вертикального перемещения и вращательного движения,...
Ігровий автомат “хто сильніший?”
Номер патенту: 88
Опубліковано: 30.04.1993
Автор: Марголін Євген Хананович
МПК: A63F 13/02
Мітки: сильніший, автомат, ігровий, хто
Формула / Реферат:
Игровой автомат, содержащий блок предъявления задания и установленный на основании силовой рычаг, отличающийся тем, что он дополнительно содержит установленные на основании с возможностью взаимодействия с соответствующими переключателями подлокотник и опорные штанги, монетоприемник и блок слежения за игрой, содержащий блок управления приводом силового рычага, задатчик усилия, последовательно соединенные датчик положения силового рычага,...
Автомат для виготовлення вафельних стаканчиків для морозива
Номер патенту: 1338
Опубліковано: 25.03.1994
Автори: Калинкін Вадим Іванович, Оттиско Федір Федорович
МПК: A21B 5/00
Мітки: вафельних, морозива, виготовлення, автомат, стаканчиків
Формула / Реферат:
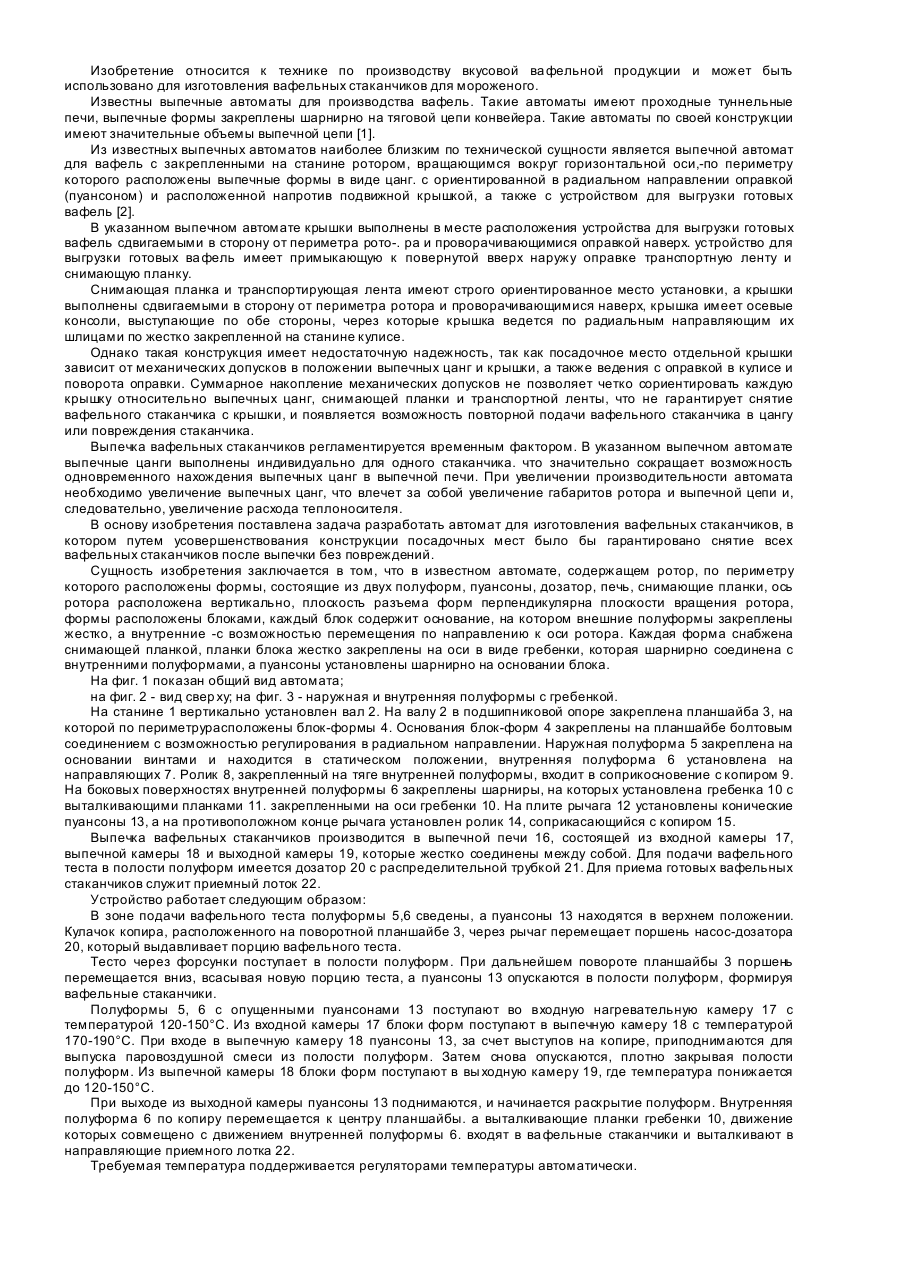
Автомат для изготовления вафельных стаканчиков для мороженого, содержащий ротор, по периметру которого расположены формы, состоящие из двух полуформ, пуансоны, дозатор, печь и планки для съема стаканчиков, отличающийся тем, что ось вращения ротора расположена вертикально, плоскость разъема форм перпендикулярна плоскости вращения ротора, формы расположены блоками, каждый из которых содержит основание, на котором внешние полуформы закреплены...
Попередній патент: Пристрій для вібраційної діагностики циклічних механізмів
Наступний патент: Спосіб прасування текстильних виробів
Випадковий патент: Радіатор системи охолодження двигуна внутрішнього згоряння