Спосіб захисту стрічкового конвейєра від аврійного буксування
Номер патенту: 15651
Опубліковано: 30.06.1997
Автори: Колчев Євген Васильович, Чікалов Віталій Іванович, Пісковатськая Ольга Вікторівна, Макаров Віктор Михайлович, Саблін Вадим Дмитрович
Формула / Реферат
1. Способ защиты ленточного конвейера от аварийного буксования, включающий измерение скорости скольжения ленты относительно поверхности приводного барабана, отличающийся тем, что задают величину допустимого значения работы сил трения, дополнительно формируют сигнал, пропорциональный силам трения в очаге буксования, умножают его на сигнал скорости скольжения и из полученной величины мощности сил трения в очаге буксования вычитают один сигнал, пропорциональный мощности потерь в окружающую среду, и второй - пропорциональный мощности, выносимой из очага буксования движущейся лентой, интегрируют результирующий сигнал и полученную величину работы сил трения, поглощенной в очаге буксования, сравнивают с допустимым значением и в случае его превышения вырабатывают сигнал на отключение привода конвейера
2. Способ по п.1, отличающийся тем, что сигнал, пропорциональный мощности, выносимой из очага буксования движущейся лентой, формируют путем перемножения сигналов, пропорциональных скорости движения ленты конвейера и количеству энергии, поглощенной в очаге буксования.
Текст
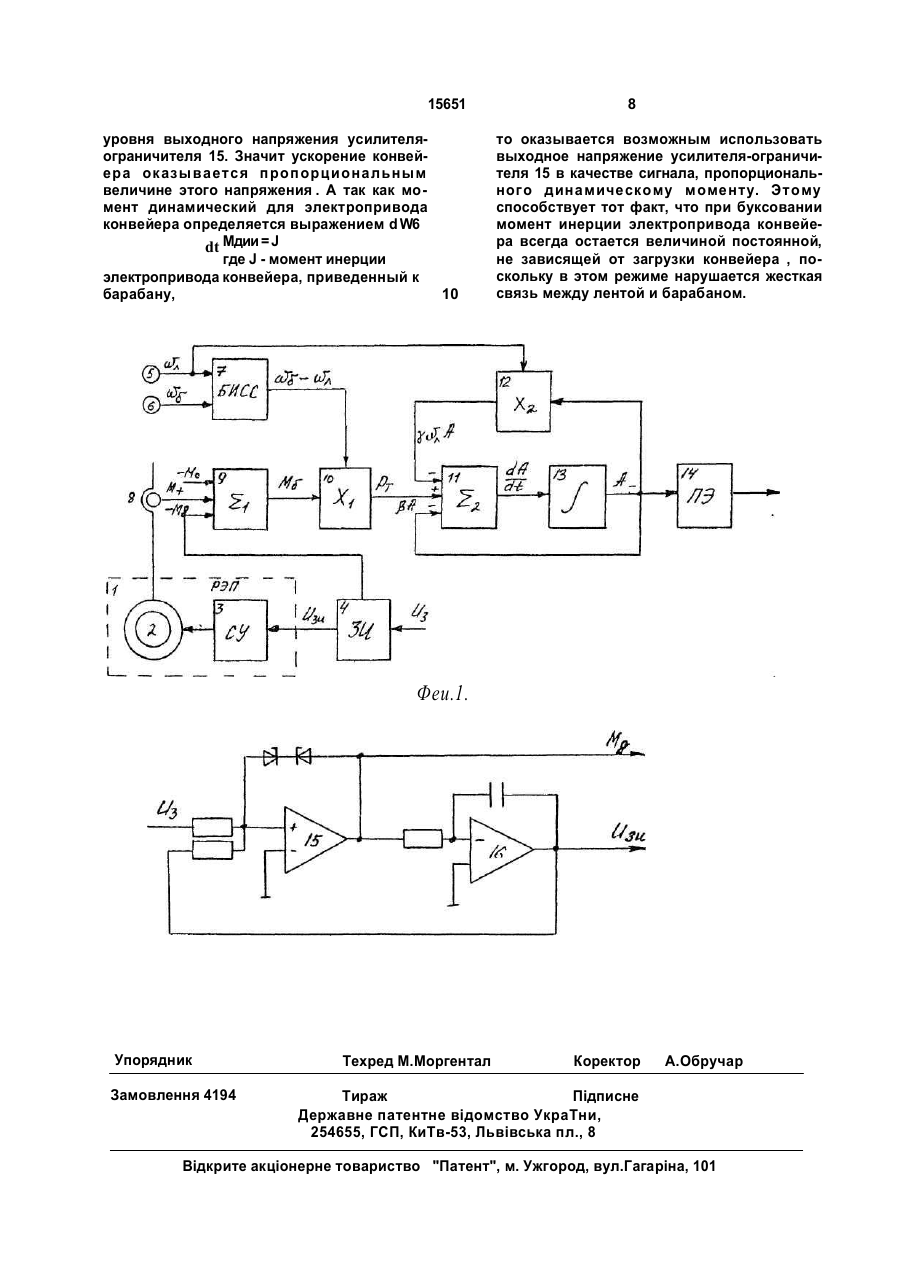
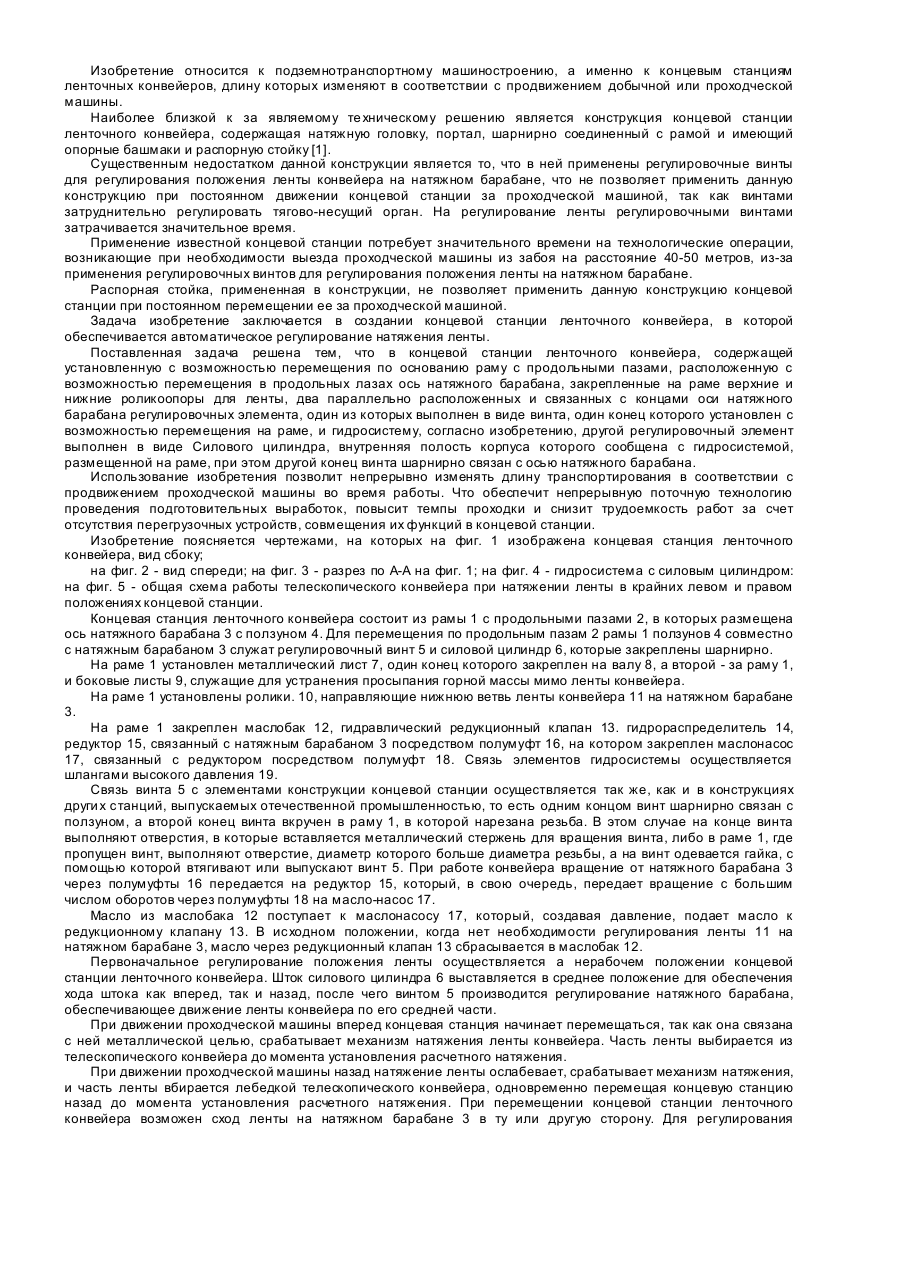
1. Способ защиты ленточного конвейєра от аварийного буксования, включающий из мерение скорости скольжения ленты отно сительно поверхности приводного барабана, о т л и ч а ю щ и й с я тем, что задают величину допустимого значения ра боты сил трения, дополнительно формиру ют сигнал, пропорциональный силам трения в очаге буксования, умножают его на сигнал скорости скольжения и из полученной величины мощности сил трения в очаге буксования вычитают один сигнал, пропорциональный мощности потерь в окружающую среду, и второй - пропорциональный мощности, выносимой из очага буксования движущейся лентой, интегрируют результирующий сигнал и полученную величину работы сил трения, поглощенной в очаге буксования, сравнивают с допустимым значением и в случае его превышения вырабатывают сигнал на отключение привода конвейера 2. Способ по п.1, о т л и ч а ю щ и й с я тем, что сигнал, пропорциональный мощности, выносимой из очага буксования движущейся лентой, формируют путем перемножения сигналов, пропорциональных скорости движения ленты конвейера и количеству энергии, поглощенной в очаге буксования. Изобретение относится к средствам автоматизации конвейерного транспорта и может быть использовано для автоматической защиты ленточных конвейеров от аварийного буксования. рого формируют сигнал на отключение привода конвейера. Этому способу присущ такой существенный недостаток, как оценка процесса буксования только по величине скорости скольжения без учета энерго-силовых факторов, от которых в значительной мере зависит интенсивность нагрева и износа ленты и футеровки барабана. Это приводит к неадекватной оценке ситуации, возникающей при буксовании. С одной стороны, при кратковременных пробуксовках в период пуска, защита, построенная на этом принципе, может выдавать сигнал на отключение Наиболее близким к предлагаемому является способ, реализованный в устройстве для измерения величины проскальзывания ленты конвейера, согласно которому осуществляют измерение скорости скольжения ленты конвейера относительно поверхности приводного барабана и сравнивают ее с пороговым значением, при достижении кото С > сл ON (Л О 15651 привода конвейера раньше, чем этого требует фактическое состояние параметров процесса. С другой стороны, может иметь место и обратное явление, когда при большой нагрузке на конвейер возникает длительный режим буксования, но скорость скольжения ленты при этом не достигает установленного порогового значения. В этих условиях такая защита не срабатывает и износ оборудования (ленты и футеровки барабана) превосходит допустимые границы, что существенно снижает надежность системы защиты конвейера от аварийного буксования. В основу изобретения поставлена задача повышения надежности защиты за счет исключения ложных преждевременных срабатываний в период пуска при одновременном повышении ее чувствительности к длительным пробуксовкам под нагрузкой с малыми величинами скорости скольжения ленты относительно поверхности приводно о барабана. Поставленная задача решается тем, что в способе, включающем измерение скоро сти скольжения ленты относительно повер хности приводного барабана, согласно изобретению, задают величину допустимо го значения работы сил трения, дополни тельно формируют сигнал, пропорциональный силам трения в очаге буксования. Путем умножения последнего на сигнал скорости скольжения получают величину мощности сил трения в очаге бук сования, из которой вычитают один сигнал, пропорциональный мощности потерь в ок ружающую среду, и второй - пропорцио нальный мощности, выносимой из очага буксования движущейся лентой. Путем ин тегрирования результирующего сигнала получают величину работы сил трения, по глощенную в очаге буксования, последнюю сравнивают с допустимым значением и в случае превышения вырабатывают сигнал на отключение привода конвейера. Сигнал, пропорциональный мощности выносимой из очага буксования движущейся лентой, формируют путем перемножения сигналов, пропорциональных скорости движения ленты конвейера и количеству энергии, поглощенной в очаге буксования. В основе изобретения лежит уравнение энергетического баланса для очага буксования, которое для бесконечно малого промежутка времени dt записывается в таком виде: Рт dt - С dA +/? A dt + у A wn dt (1) где Рт - мощность сил трения в очаге буксования; С - коэффициент поглощения энергии барабаном и лентой; А- энергия, поглощаемая в зоне буксо вания; 5 /?- коэффициент рассеяния энергии; \«л - скорость ленты, приведенная к вращательному движению барабана; у - коэффициент поглощения энергии лентой. 10 При переходе к нормальной форме Коши, из (1) следует ^=l(PT-/?A-yAwfl) (2) Решение уравнения (2) позволяет опре-15 делить величину энергии сил трения А, поглощенную в очаге буксования. Если она превышает заданное допустимое значение Адоп, вырабатывают команду на отключение привода конвейера. 20 Сигнал, пропорциональный мощности сил трения, в очаге буксования формируют на основе зависимости 25 Рт = FT (3) где FT - сила трения на поверхности приводного барабана при буксовании; R6 - радиус барабана; WCK - приведенная к вращательному 30 движению скорость скольжения ленты относительно поверхности приводного барабана. На фиг.1 показана принципиальная схема устройства защиты ленточного конвейе35 ра от аварийного буксования, реализующая заявляемый способ, на фиг.2 - принципиальная схема задатчика интенсивности с дополнительным выходом. Устройство защиты ленточного конвей40 ера от аварийного буксования содержит регулируемый электропривод 1, включающий в себя приводной электродвигатель 2 конвейера с системой управления 3, причем, электродвигатель 2 подключен к силовому 45 выходу системы управления 3. К управляющему входу регулируемого электропривода 1 основным выходом подключен задатчик интенсивности 4, имеющий дополнительный выход. Входящие в состав устройства 50 датчики скорости ленты 5 и скорости барабана б выходами подключены к блоку измерения скорости скольжения ленты 7.' Введенный в состав устройства датчик момента электродвигателя 8 подключен выхо55 дом к одному из входов первого сумматора 9, второй вход которого соединен с дополнительным выходом задатчика интенсивности 4, а третий вход является входом сигнала коррекции. Выход первого сумматора 9 подключен к первому входу первого 15651 перемножителя 10, который вторым входом жение первого перемножителя 10 также соединен с выходом блока измерения ско- равно нулю. В этих условиях последовательно рости скольжения ленты 7. Выход первого включенные второй сумматор 11 и интегратор перемножителя 10 соединен с первым вхо- 13 оказываются охваченными 5 двумя дом второго сумматора 11, второй вход ко- цепочками отрицательной обратной связи . торого подключен к выходу второго Одна из них образована связью , неперемножителя 12, входы которого соеди- посредственно передающей сигнал с выхода нены с выходами датчика скорости ленты 5 интегратора 13 на третий вход второго и интегратора 13, своим входом подключен- сумматора 11, а вторая осуществляется ченого к выходу второго сумматора 11. Третий 10 рез второй перемножитель 12. Поэтому при вход второго сумматора 11 соединен с выхоотсутствии буксования выходное напряжедом интегратора 13, к которому подключен ние интегратора 13 стремится к нулю. Это пороговый элемент 14. приводит к тому, что пороговый элемент 14 Устройство защиты ленточного конвейнаходится в исходном состоянии и выдает ера от аварийного буксования, реализую- 15 сигнал, разрешающий работу приводного щее данный способ, работает следующим электродвигателя 2 конвейера. образом. При возникновении буксования, на выВ процессе пуска или работы конвейера ходе блока измерения скорости скольжения источником механической энергии является 7 появляется сигнал, отличный от нуля, в регулируемый электропривод 1, состоящий 20 результате чего на выходе первого пере из электродвигателя 2 и системы управле множителя 10 формируется напряжение, ния 3, при этом выходные сигналы датчиков пропорциональное мощности буксования. скорости ленты 5 и барабана 6 непрерывно Будучи поданным через второй сумматор 11 поступают на входы блока измерения скоро на вход интегратора 13, оно вызывает рост сти скольжения ленты 7, на выходе которо 25 его выходного напряжения, характеризуюго формируется напряжение, щего количество энергии, накапливающейпропорциональное разности сигналов от ся в зоне буксования . Однако темп ее датчиков скорости. При отсутствии буксова накопления и конечное установившееся ния оно равно нулю. В то же время с по значение зависят не только от величины мощью датчика момента 8 непрерывно 30 мощности буксования, но и от потерь энеризмеряется момент приводного электродви гии в окружающую среду, что воспроизвогателя 2 конвейера. Выходное напряжение дится в устройстве путем подачи части датчика момента 8 подается на первый вход сигнала с выхода интегратора 13 по цепи первого сумматора 9. На промежуточном отрицательной обратной связи непосредствыходе задатчика интенсивности 4 напря 35 венно на третий вход второго сумматора 11. жение, пропорциональное динамическому Кроме того, часть энергии, выделившейся в моменту электродвигателя, формируется зоне буксования, уносится с движущейся только в периоды пуска и торможения кон конвейерной лентой. Этот процесс воспровейера. Будучи поданным на второй вход изводится с помощью передачи части выпервого сумматора 9, оно в период пуска 40 ходного сигнала интегратора 13 через уменьшает выходное напряжение послед перемножитель 12 на второй вход второго него на величину, пропорциональную дина сумматора 11. Благодаря тому, что на втомическому моменту, позволяя получить рой вход перемножителя 12 подается насигнал, пропорциональный статическому пряжение, пропорциональное скорости моменту. Благодаря поступающему на тре 45 движения ленты, интенсивность действия тий вход первого сумматора 9 напряжению этой связи напрямую связана с этим паракоррекции, пропорциональному моменту метром. Так, при неподвижной конвейерхолостого хода привода барабана, на выхо ной ленте, эта связь окажется отключенной де этого сумматора получают сигнал , про и защита сработает быстрей. Наоборот, по порциональный моменту, приложенному к 50 мере роста скорости движения ленты, проприводному барабану со стороны ленты . исходит как бы загрубление защиты, так как При возникновении пробуксовки этот мо при этом условия в зоне буксования облегмент определяется силами трения между чаются. лентой и барабаном. Принципиальная схема задатчика инНа входы первого перемножителя 10 55 тенсивности с дополнительным выходом поступают выходные напряжения первого состоит из усилителя-ограничителя 15 и инсумматора 9 и блока измерения скорости тегрирующего усилителя 16. В этой схеме скольжения ленты 7. В нормальном режиме темп изменения основного выходного наработы, при отсутствии буксования, последпряжения задатчика интенсивности, сниманее равно нулю, поэтому и выходное напряемого с выхода интегратора 16, зависит от мшш 15651 уровня выходного напряжения усилителяограничителя 15. Значит ускорение конвейера оказы вается пропорциональным величине этого напряжения . А так как момент динамический для электропривода конвейера определяется выражением d W6 dt Мдии = J где J - момент инерции электропривода конвейера, приведенный к барабану, 10 8 то оказывается возможным использовать выходное напряжение усилителя-ограничителя 15 в качестве сигнала, пропорционального динамическому моменту. Этому способствует тот факт, что при буксовании момент инерции электропривода конвейера всегда остается величиной постоянной, не зависящей от загрузки конвейера , поскольку в этом режиме нарушается жесткая связь между лентой и барабаном. Феи.1. Упорядник Замовлення 4194 Техред М.Моргентал Коректор А.Обручар Тираж Підписне Державне патентне відомство УкраТни, 254655, ГСП, КиТв-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of protection of belt conveyer against emergency slipping
Автори англійськоюChikalov Vitalii Ivanovych, Kolchev Yevhen Vasyliovych, Piskovatskaia Olha Viktorivna, Sablin Vadym Dmytrovych, Makarov Viktor Mykhailovych
Назва патенту російськоюСпособ защиты ленточного конвейера от аварийного буксования
Автори російськоюЧикалов Виталий Иванович, Колчев Евгений Васильевич, Писковатская Ольга Викторовна, Саблин Вадим Дмитриевич, Макаров Виктор Михайлович
МПК / Мітки
МПК: B65G 43/04
Мітки: спосіб, захисту, аврійного, конвейєра, буксування, стрічкового
Код посилання
<a href="https://ua.patents.su/4-15651-sposib-zakhistu-strichkovogo-konvejjehra-vid-avrijjnogo-buksuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб захисту стрічкового конвейєра від аврійного буксування</a>
Завантажувальна секція стрічкового конвейєра

Номер патенту: 13237
Опубліковано: 28.02.1997
Автори: Черкаський Фелікс Борисович, Горбач Борис Михайлович, Кайтанджан Едуард Гургенович, Козлов Євгеній Міхайловіч, Монастирський Віталій Федорович, Філонов Володимир Опанасович, Соколан Валентин Іванович, Новіков Євген Єрмолайович
МПК: B65G 15/60, B65G 21/00
Мітки: секція, стрічкового, завантажувальна, конвейєра
Формула / Реферат:
1. Загрузочная секция ленточного конвейера, включающая связанные друг с другом неподвижную и подвижную рамы, установленные на последней с возможностью взаимодействия с лентой конвейера и связанные между собой посредством поперечных связей, боковые ролики, опорную ленту с натяжным приспособлением, расположенную на поперечных связях боковых роликов, и закрепленные на опорной ленте средние ролики, отличающаяся тем, что она снабжена установленной...
Секція стрічкового конвейєра

Номер патенту: 1728
Опубліковано: 25.10.1994
Автори: Городецький Анатолій Васильович, Золотопух Володимир Миколайович, Жукова Нінель Гнатівна
МПК: B65G 21/00
Мітки: конвейєра, секція, стрічкового
Формула / Реферат:
1. Секция ленточного конвейєра, содержащая подвесные роликоопоры с боковыми и средними роликами, закрепленными по концам на направляющих через амортизаторы, отличающаяся тем, что, с целью повышения надежности работы секции за счет снижения просыпи между бортом и лентой, она снабжена дополнительными роликами, размещенными между подвесными ролико-опорными и закрепленными на направляющих консольно посредством кронштейнов с возможностью...
Перехідна секція стрічкового конвейєра
Номер патенту: 8408
Опубліковано: 29.03.1996
Автори: Андреєв Анатолій Григорович, Сорока Георгій Митрофанович, Макаров Віктор Михайлович
МПК: B65G 41/00
Мітки: стрічкового, секція, перехідна, конвейєра
Формула / Реферат:
Переходная секция ленточного конвейера, имеющая опорный стол, установленный на несущих конструкциях конвейера, и роликоопоры, отличающаяся тем, что, с целью исключения неравномерного нагружения роликоопор, каждая несущая конструкция снабжена направляющими с криволинейной поверхностью, расположенными по краям опорного стола и вдоль него, при этом опорный стол соединен шарнирно с одной несущей конструкцией, а на другой несущей конструкции...
Кінцева станція стрічкового конвейєра
Номер патенту: 1477
Опубліковано: 25.07.1994
Автор: Гаврюков Олександр Володимирович
МПК: E21F 13/08, B65G 41/00
Мітки: кінцева, стрічкового, станція, конвейєра
Формула / Реферат:
Концевая станция ленточного конвейера, содержащая установленную с Возможностью перемещения по основанию раму с продольными пазами, расположенную с возможностью перемещения в продольных пазах ось натяжного барабана, закрепленные на раме верхнее и нижние роликоопоры для ленты, два параллельно расположенных и связанных с концами оси натяжного барабана регулировочных элемента, один из которых выполнен в виде винта, один конец которого установлен...
Пристрій для розвантаження матеріалу із стрічкового конвейєра

Номер патенту: 2412
Опубліковано: 26.12.1994
Автори: Недобор Станіслав Дмитрович, Галацький Вадим Євсійович, Дубинський Микола Борисович
МПК: B65G 47/74
Мітки: конвейєра, стрічкового, розвантаження, матеріалу, пристрій
Формула / Реферат:
1. Устройство для разгрузки материала с лей-точного конвейєра, включающее расположенные над лентой последнего подвижные в горизонтальной плоскости створки-отвалы, смонтированный на раме ленточного конвейера привод, кинематически связанный со створками-отвалами, и отводящие течки, отличающееся тем, что, с целью повышения эффективности работы устройства путем обеспечения дифференцированного удаления материала с ленты конвейера, оно снабжено...
Попередній патент: Опорно-упорний підшипник ковзання
Наступний патент: Пристрій для програмування швидкості позиційного електроприводу
Випадковий патент: Система контролю зайнятості ділянок колії