Пристрій для програмування швидкості позиційного електроприводу
Номер патенту: 15652
Опубліковано: 30.06.1997
Автори: Кліпін В'ячеслав Михайлович, Барінберг Віктор Олександрович, Саблін Вадим Дмитрович, Коцегуб Павло Харитонович, Корнієнко Анатолій Прокоп'євич, Іванченко Юрій Вікторович

Формула / Реферат
Устройство для программирования скорости позиционного электропривода, содержащее задатчик положения, датчик пути, элемент сравнения, масштабный блок, пороговый элемент, управляемый ключ, задатчик интенсивности и звено ограничения, причем задатчик положения соединен с силовым входом ключа и через масштабный блок - с первым входом элемента сравнения, ко второму входу которого подключен датчик пути, выход элемента сравнения соединен через пороговый элемент с управляющим входом ключа, выход последнего подключен через задатчик интенсивности к входу звена ограничения, выход которого предназначен для подключения к регулятору скорости электропривода, отличающееся тем, что в него введены датчик скорости и второй масштабный блок, а элемент сравнения снабжен третьим входом, к которому через второй масштабный блок подключен выход датчика скорости.
Текст
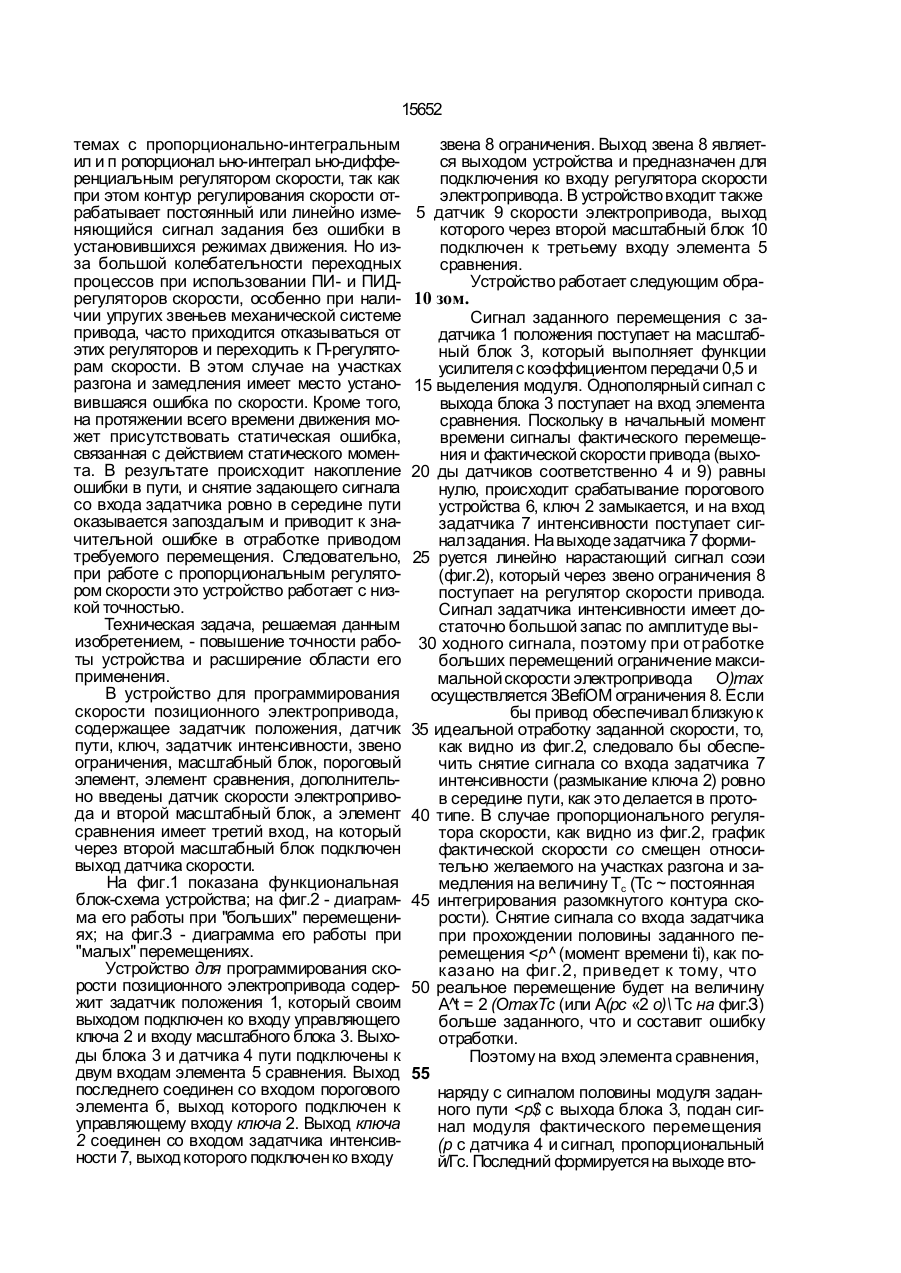
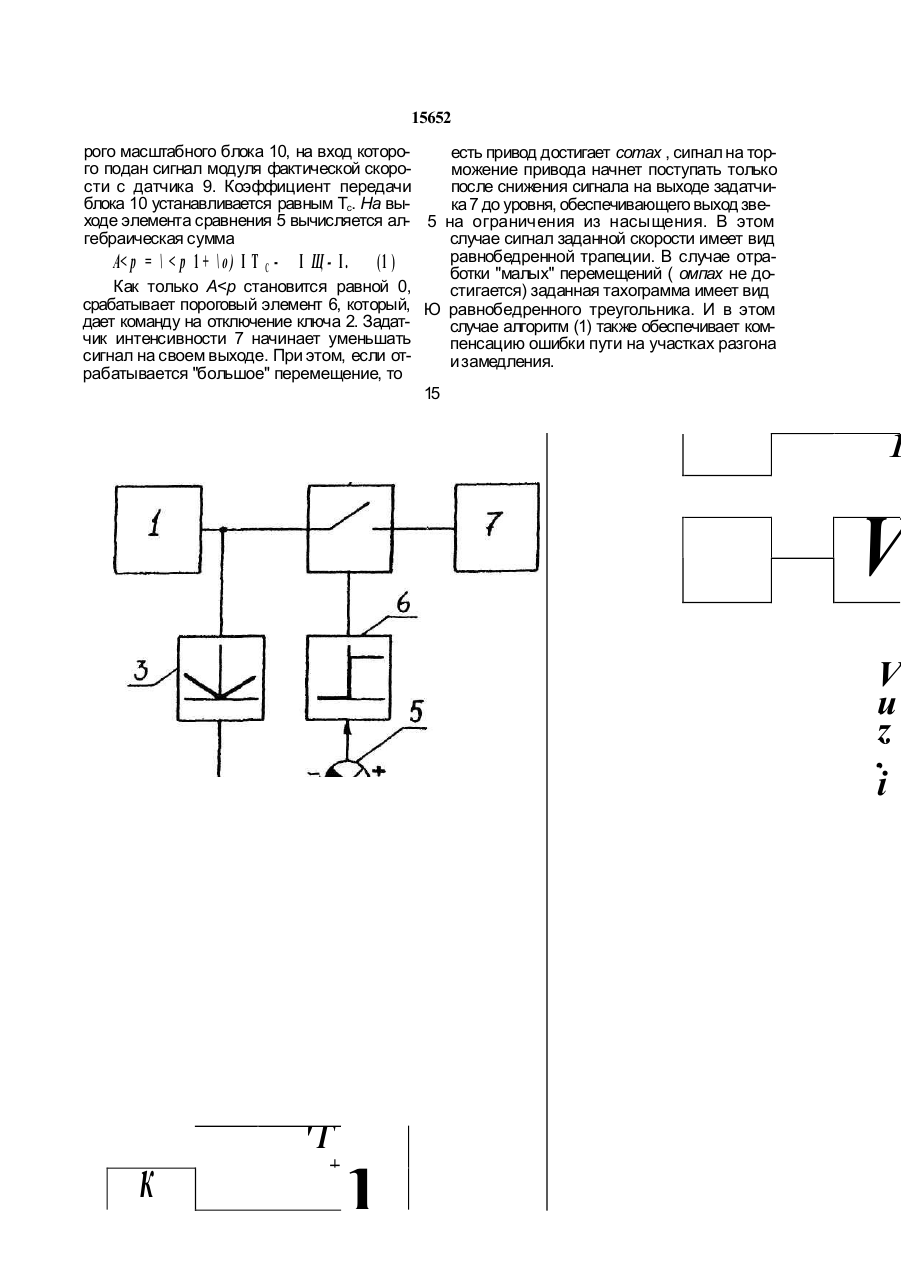
Устройство для программирования ско рости позиционного электропривода, со держащее задатчик положения, датчик пути, элемент сравнения, масштабный блок, пороговый элемент, управляемый ключ, задатчик интенсивности и звено ограничения, причем задатчик положения соединен с силовым входом ключа и через масштабный блок - с первым входом элемента сравнения, ко второму входу которого подключен датчик пути, выход элемента сравнения соединен через пороговый элемент с управляющим входом ключа, выход последнего подключен через задатчик интенсивности ко входу звена ограничения, выход которого предназначен для подключения к регулятору скорости электропривода, отличающее с я тем, что в него введены датчик скорости и второй масштабный блок, а элемент сравнения снабжен третьим входом, к которому через второй масштабный блок подключен выход датчика скорости. С > СЛ ON СЛ ю Изобретение относится к устройствам управления автоматизированным электроприводом и может быть использовано для формирования сигналов задания в системах управления позиционными электроприводами, например, роторных экскаваторов, шахтных подъемных установок и т.д. Известно устройство для программирования скорости позиционного электропривода [2], выбранное в качестве прототипа, содержащее задатчик положения, датчик пути, ключ, задатчик интенсивности, звено ограничения, масштабный блок, пороговый элемент, элемент сравнения. Выход задатчика положения соединен с силовым входом ключа и через масштабный блок с первым входом элемента сравнения, ко второму входу которого подключен датчик пути. Выход элемента сравнения соединен через пороговый элемент с управляющим входом ключа, выход которого через задатчик интенсивности подключен ко входу звена огран ичен ия. Выход пос ледн ег о предназначен для подключения ко входу регулятора скорости электропривода. Устройство обеспечивает прохождение заданного пути по треугольной или трапецеидальной тахограмме благодаря тому, что обеспечивается снятие задания со входа задатчика ровно в середине пути. Однако это устройство имеет ограниченную область применения - только в сие О 15652 темах с пропорционально-интегральным ил и п ропорционал ьно-интеграл ьно-дифференциальным регулятором скорости, так как при этом контур регулирования скорости отрабатывает постоянный или линейно изменяющийся сигнал задания без ошибки в установившихся режимах движения. Но изза большой колебательности переходных процессов при использовании ПИ- и ПИДрегуляторов скорости, особенно при наличии упругих звеньев механической системе привода, часто приходится отказываться от этих регуляторов и переходить к П-регуляторам скорости. В этом случае на участках разгона и замедления имеет место установившаяся ошибка по скорости. Кроме того, на протяжении всего времени движения может присутствовать статическая ошибка, связанная с действием статического момента. В результате происходит накопление ошибки в пути, и снятие задающего сигнала со входа задатчика ровно в середине пути оказывается запоздалым и приводит к значительной ошибке в отработке приводом требуемого перемещения. Следовательно, при работе с пропорциональным регулятором скорости это устройство работает с низкой точностью. Техническая задача, решаемая данным изобретением, - повышение точности работы устройства и расширение области его применения. В устройство для программирования скорости позиционного электропривода, содержащее задатчик положения, датчик пути, ключ, задатчик интенсивности, звено ограничения, масштабный блок, пороговый элемент, элемент сравнения, дополнительно введены датчик скорости электропривода и второй масштабный блок, а элемент сравнения имеет третий вход, на который через второй масштабный блок подключен выход датчика скорости. На фиг.1 показана функциональная блок-схема устройства; на фиг.2 - диаграмма его работы при "больших" перемещениях; на фиг.З - диаграмма его работы при "малых" перемещениях. Устройство для программирования скорости позиционного электропривода содержит задатчик положения 1, который своим выходом подключен ко входу управляющего ключа 2 и входу масштабного блока 3. Выходы блока 3 и датчика 4 пути подключены к двум входам элемента 5 сравнения. Выход последнего соединен со входом порогового элемента б, выход которого подключен к управляющему входу ключа 2. Выход ключа 2 соединен со входом задатчика интенсивности 7, выход которого подключен ко входу звена 8 ограничения. Выход звена 8 является выходом устройства и предназначен для подключения ко входу регулятора скорости электропривода. В устройство входит также 5 датчик 9 скорости электропривода, выход которого через второй масштабный блок 10 подключен к третьему входу элемента 5 сравнения. Устройство работает следующим обра 10 зом. Сигнал заданного перемещения с задатчика 1 положения поступает на масштабный блок 3, который выполняет функции усилителя с коэффициентом передачи 0,5 и 15 выделения модуля. Однополярный сигнал с выхода блока 3 поступает на вход элемента сравнения. Поскольку в начальный момент времени сигналы фактического перемещения и фактической скорости привода (выхо20 ды датчиков соответственно 4 и 9) равны нулю, происходит срабатывание порогового устройства 6, ключ 2 замыкается, и на вход задатчика 7 интенсивности поступает сигнал задания. На выходе задатчика 7 форми25 руется линейно нарастающий сигнал соэи (фиг.2), который через звено ограничения 8 поступает на регулятор скорости привода. Сигнал задатчика интенсивности имеет достаточно большой запас по амплитуде вы30 ходного сигнала, поэтому при отработке больших перемещений ограничение максимальной скорости электропривода О)тах осуществляется 3BefiOM ограничения 8. Если бы привод обеспечивал близкую к 35 идеальной отработку заданной скорости, то, как видно из фиг.2, следовало бы обеспечить снятие сигнала со входа задатчика 7 интенсивности (размыкание ключа 2) ровно в середине пути, как это делается в прото40 типе. В случае пропорционального регулятора скорости, как видно из фиг.2, график фактической скорости со смещен относительно желаемого на участках разгона и замедления на величину Тс (Тс ~ постоянная 45 интегрирования разомкнутого контура скорости). Снятие сигнала со входа задатчика при прохождении половины заданного перемещения
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for position electrical drive speed programming
Автори англійськоюKotsehub Pavlo Harytonovych, Ivanchenko Yurii Viktorovych, Korniienko Anatolii Prokopovych, Barinberg Viktor Oleksandrovych, Sablin Vadym Dmytrovych, Klipin Viacheslav Mykhailovych
Назва патенту російськоюУстройство для программирования скорости позиционного электропривода
Автори російськоюКоцегуб Павел Харитонович, Иванченко Юрий Викторович, Корниенко Анатолий Прокофьевич, Баринберг Виктор Александрович, Саблин Вадим Дмитриевич, Клипин Вячеслав Михайлович
МПК / Мітки
МПК: H02P 7/06
Мітки: програмування, швидкості, позиційного, пристрій, електроприводу
Код посилання
<a href="https://ua.patents.su/5-15652-pristrijj-dlya-programuvannya-shvidkosti-pozicijjnogo-elektroprivodu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для програмування швидкості позиційного електроприводу</a>
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Свідлер Ігор Давидович
МПК: G01R 25/00
Мітки: пристрій, фазового, зсуву, вимірювання
Формула / Реферат:
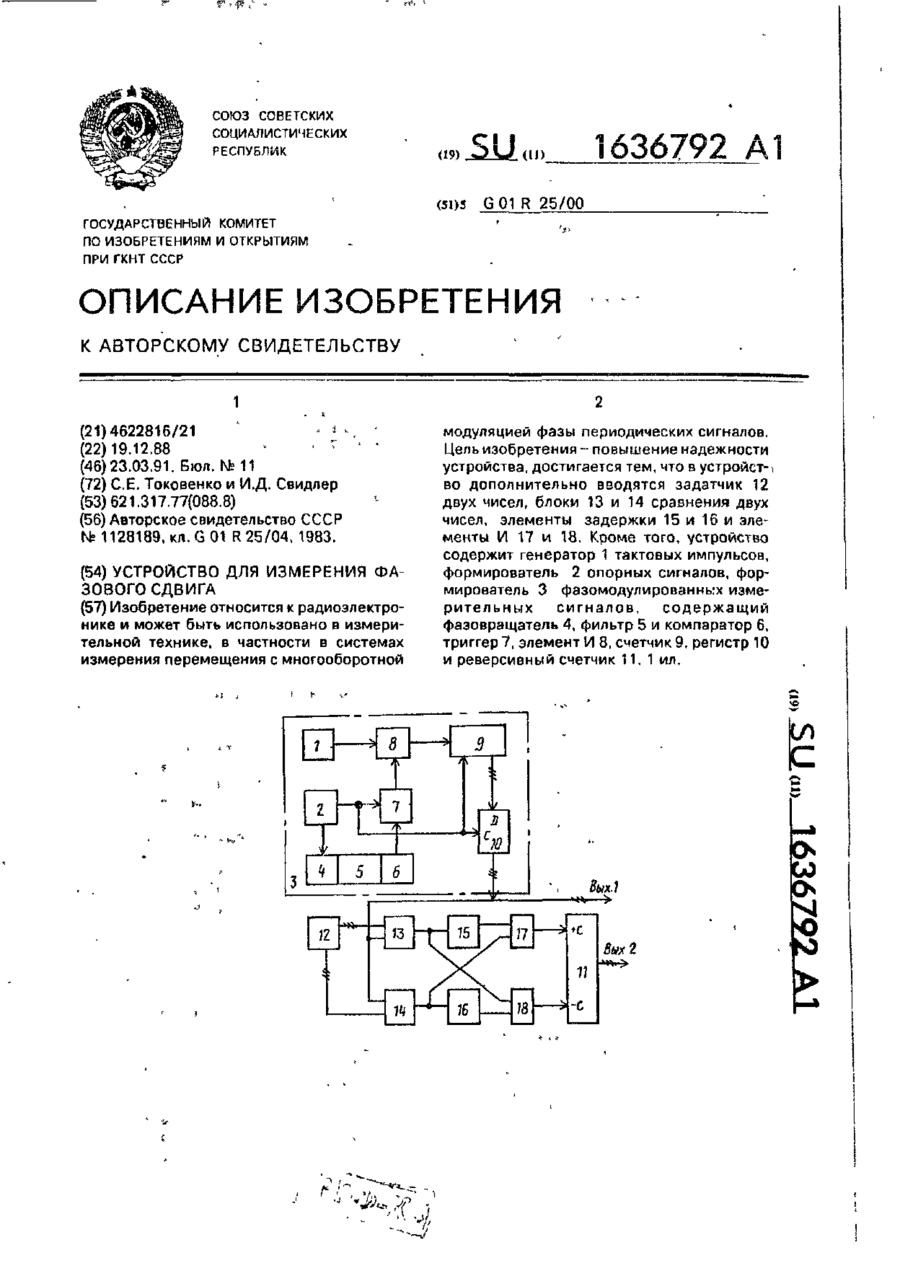
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7597
Опубліковано: 29.09.1995
Автори: Бакуменко Володимир Степанович, Захаров Володимир Миколаєвич, Кіріченко Костянтин Іванович, Сірченко Володимир Миколайович, Клименко Володимир Іванович
МПК: E21C 35/24
Мітки: управління, автоматичного, машиною, виїмковою, пристрій
Формула / Реферат:
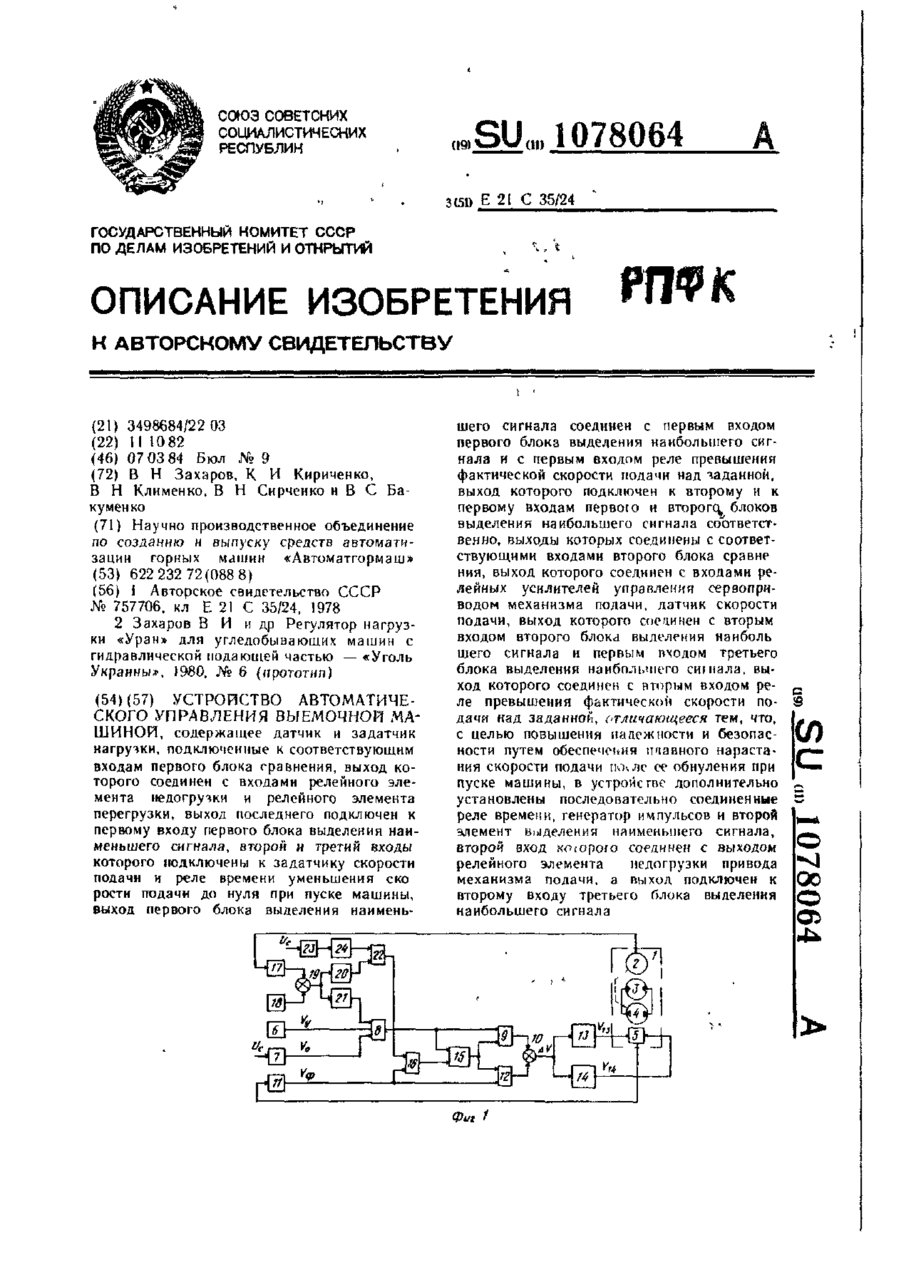
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик нагрузки, подключенные к соответствующим входам первого блока сравнения, выход которого соединен с входами релейного элемента недогрузки и релейного элемента перегрузки, выход последнего подключен к первому входу первого блока выделения наименьшего сигнала, второй и третий входы которого подключены к задатчику скорости подачи и реле времени уменьшения...
Пристрій автоматичного управління виїмкової машини
Номер патенту: 7573
Опубліковано: 29.09.1995
Автори: Сірченко Володимир Миколаєвич, Поволоцький Сергій Олександрович, Сілаєв Віктор Іванович, Жданов Костянтин Федорович
МПК: E21C 35/24
Мітки: виїмкової, автоматичного, машини, пристрій, управління
Формула / Реферат:
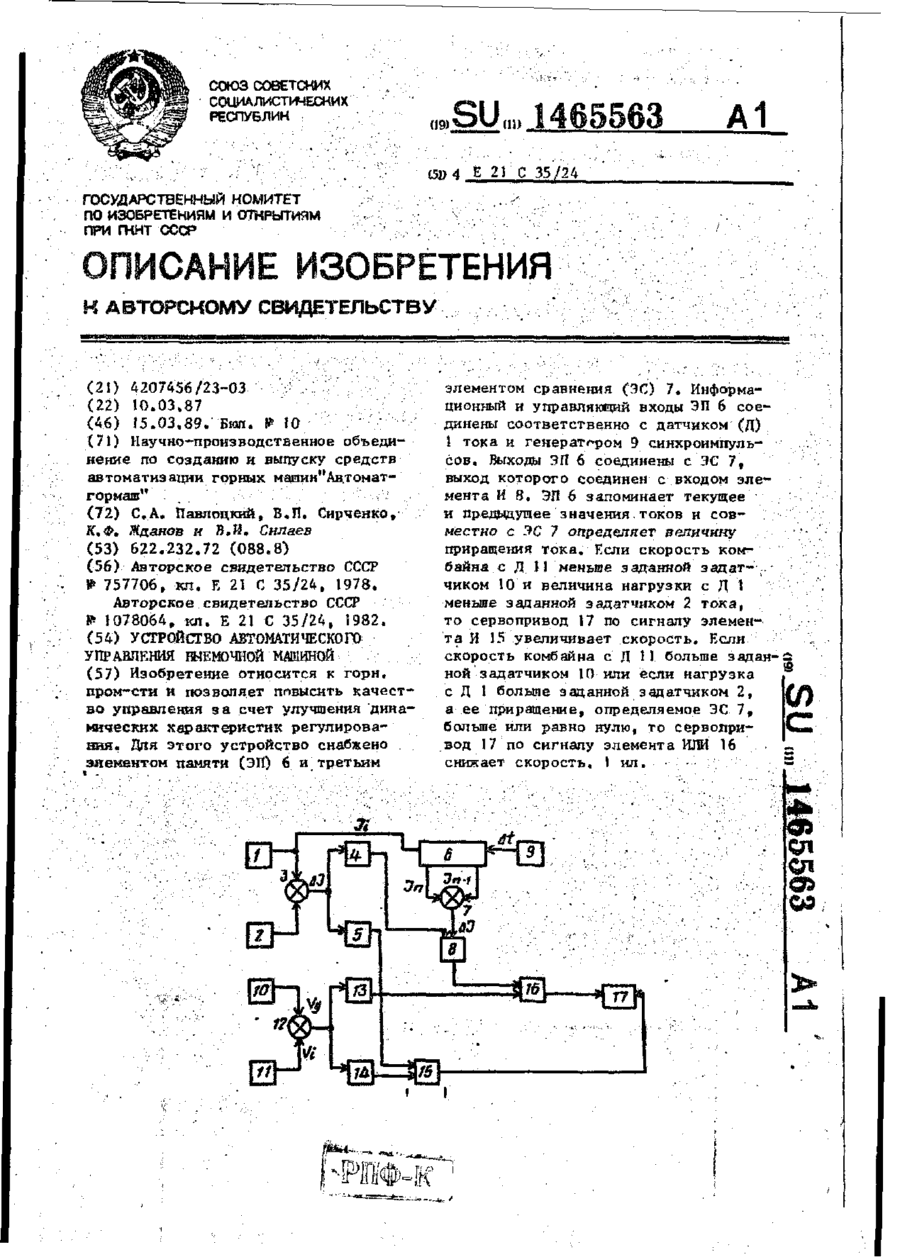
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик тока, соединенные с первым элементом сравнения, выход которого через первый и второй пороговые элементы соединен с первыми входами соответственно первого и второго элементов И, датчик и задатчик скорости, соединенные с вторым элементом сравнения, выход которого через третий и четвертый пороговые элементы соединен соответственно с вторым входом второго...
Пристрій для вимірювання переміщень
Номер патенту: 454
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Тализін Григорій Володимирович, Свідлер Ігор Давидович, Вдовиченко Валерій Іванович, Виговський Олександр Володимирович, Оснач Віктор Григорович
МПК: H03M 1/50
Мітки: пристрій, переміщень, вимірювання
Формула / Реферат:
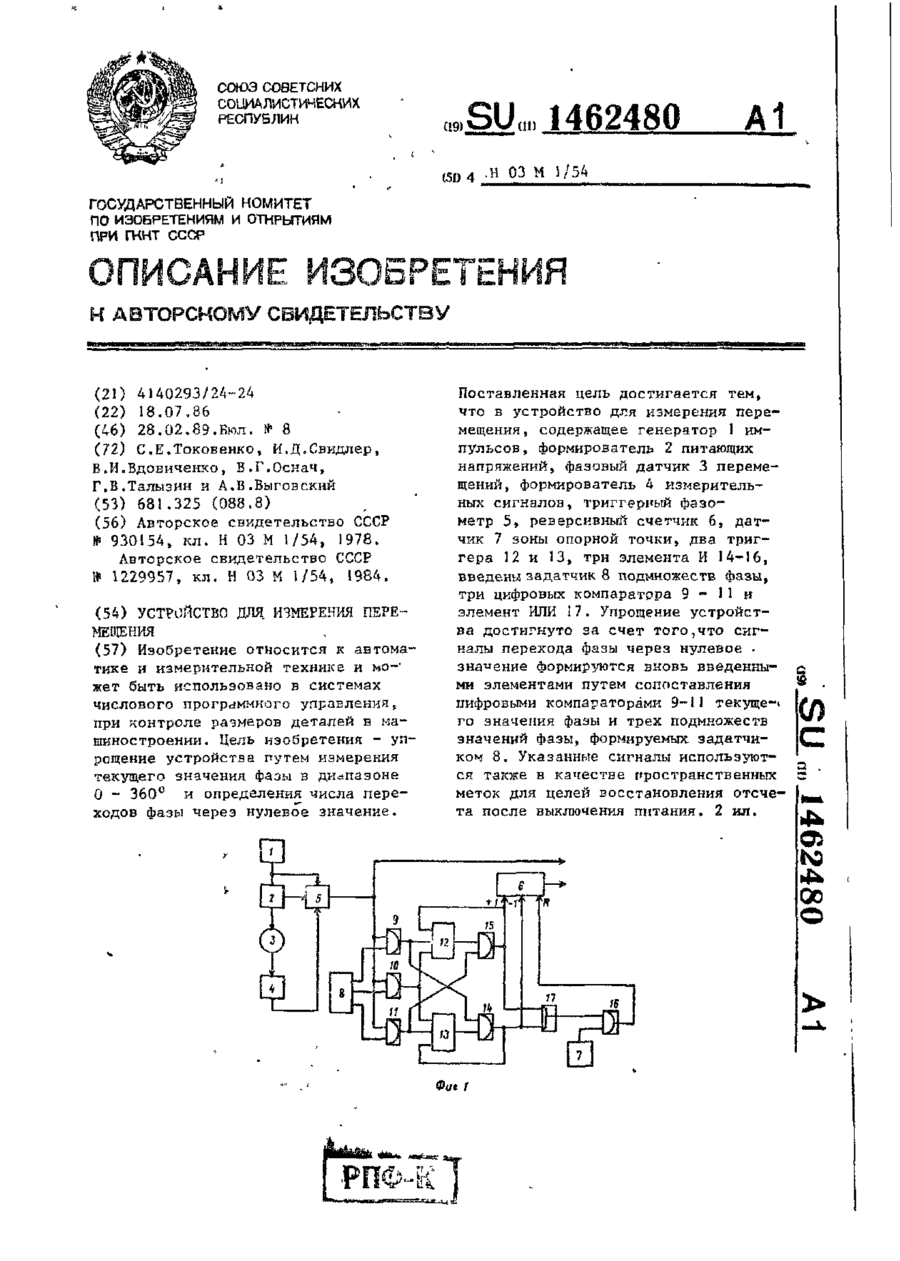
Формула изобретенияУстройство для измерения перемещения, содержащее генератор импульсов, выход которого соединен с входом формирователя питающих напряжений и с первым входом триггерного фазометра, второй вход которого подключен к первому выходу формирователя питающих напряжений, второй выход которого соединен с входом фазового датчика перемещений, выход которого через формирователь измерительных сигналов подключен к третьему входу...
Пристрій для вимірювання амплітудного значення імпульсів зварювального струму
Номер патенту: 8463
Опубліковано: 30.09.1996
Автори: Гавриш Валерій Семенович, Подола Микола Васильович, Руденко Петро Михайлович
МПК: B23K 11/24
Мітки: вимірювання, зварювального, струму, амплітудного, імпульсів, пристрій, значення
Формула / Реферат:
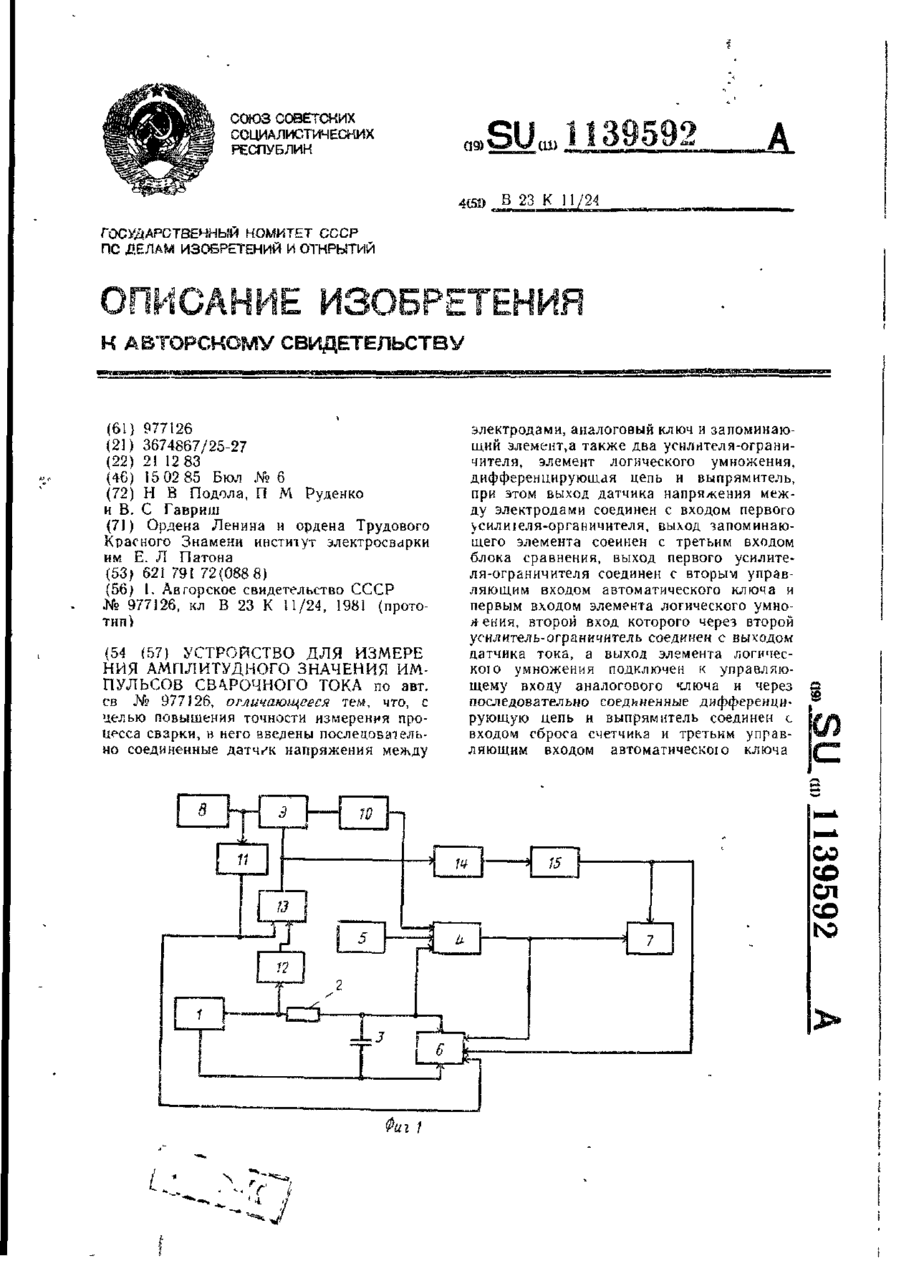
Устройство для измерения амплитудного значения импульсов сварочного тока по авт. св. № 977126, отличающееся тем, что, с целью повышения точности измерения процесса сварки, в него введены последовательно соединенные датчик напряжения между электродами, аналоговый ключ и запоминающий элемент, а также два усилителя-ограничителя, элемент логического умножения, дифференцирующая цепь и выпрямитель, при этом выход датчика напряжения между...
Попередній патент: Спосіб захисту стрічкового конвейєра від аврійного буксування
Наступний патент: Пристрій для гідравлічної класифікації
Випадковий патент: Імпульсний дозуючий вентиль