Привідне обладнання ескалатора
Номер патенту: 1763
Опубліковано: 15.05.2003
Автори: Кірєєв Юрій Владіміровіч, Хрістіч Віктор Константіновіч
Формула / Реферат
1. Привідне обладнання ескалатора, яке містить електродвигун, вихідний вал котрого кінематично зв’язаний з установленими на розміщених на похилій секції ескалатора принаймні двох валах привідними цівковими зірочками з можливістю взаємодії кожної із них з одним із тягових ланцюгів, що проходять з обох боків ступінчастого полотна ескалатора, яке відрізняється тим, що привідні цівкові зірочки, установлені на всіх, окрім одного, валах у взаємодії тільки з робочими гілками тягових ланцюгів, а кінематичний зв’язок вихідного вала електродвигуна з валами привідних цівкових зірочок виконано через міжосьовий диференціал.
2. Привідне обладнання ескалатора за п. 1, яке відрізняється тим, що кожний з валів привідних цівкових зірочок виконано у вигляді півосей, зв’язаних між собою зубчастою передачею з одночасним кінематичним зв’язком обох півосей кожного вала з міжосьовим диференціалом.
3. Привідне обладнання ескалатора за пп. 1 - 2, яке відрізняється тим, що зубчаста передача, яка зв’язує між собою півосі привідних цівкових зірочок, установлених у взаємодії з обома гілками тягових ланцюгів, виконана у вигляді міжколісного диференціала.
4. Привідне обладнання ескалатора по пп.1-3, яке відрізняється тим, що електродвигун установлений на ескалаторі уздовж осі ступінчастого полотна, а його вихідний вал кінематично зв’язаний з міжосьовим диференціалом через карданний вал.
Текст
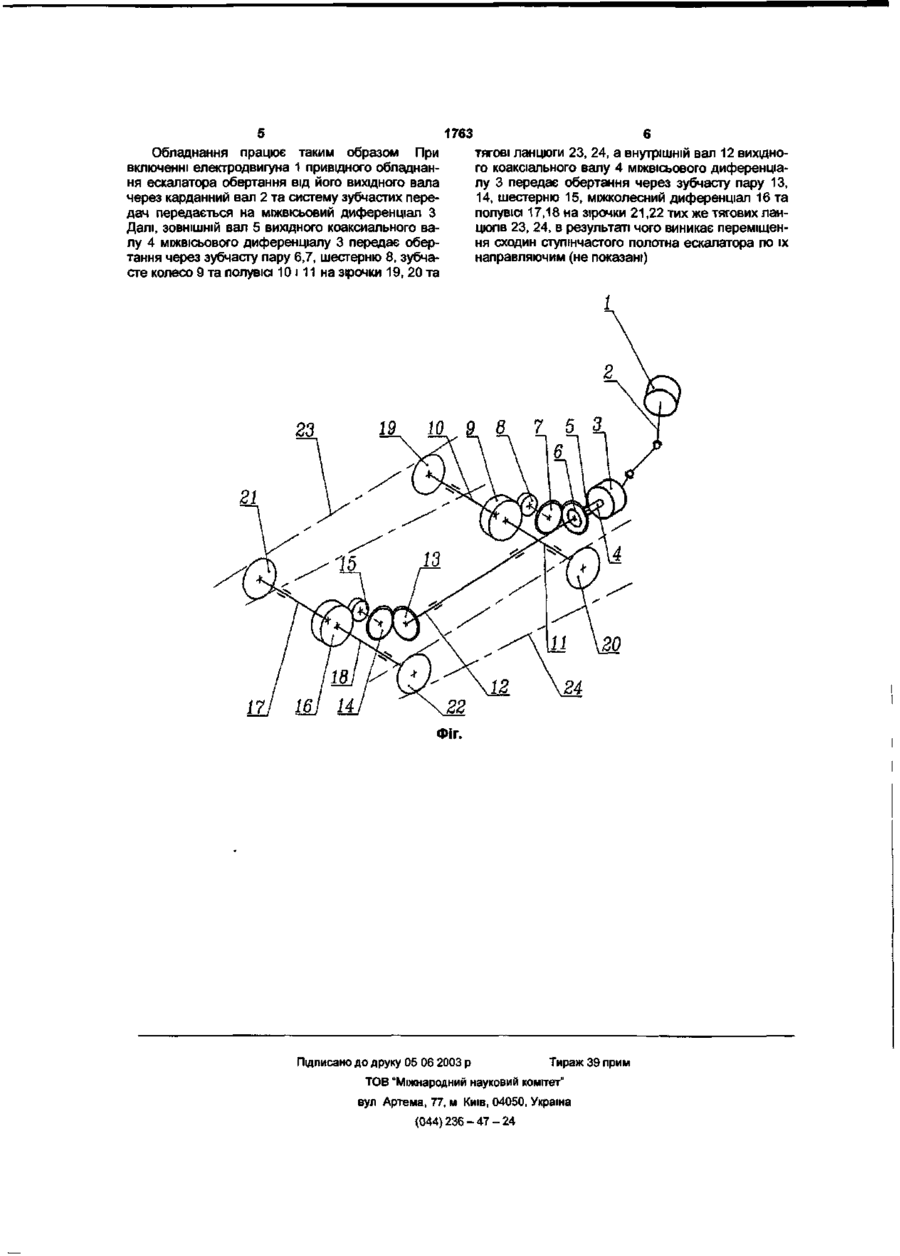
1. Привідне обладнання ескалатора, яке містить електродвигун, вихідний вал котрого кінематично зв'язаний з установленими на розміщених на похилій секції ескалатора принаймні двох валах привідними цівковими зірочками з можливістю взаємодії кожної із них з одним із тягових ланцюгів, що проходять з обох боків ступінчастого полотна ескалатора, яке відрізняється тим, що привідні цівкові зірочки, установлені на всіх, окрім одного, валах у взаємодії тільки з робочими гілками тягових ланцюгів, а кінематичний зв'язок вихідного вала електродвигуна з валами привідних цівкових зірочок виконано через міжосьовий диференціал. 2. Привідне обладнання ескалатора за п. 1, яке відрізняється тим, що кожний з валів привідних цівкових зірочок виконано у вигляді півосей, зв'язаних між собою зубчастою передачею з одночасним кінематичним зв'язком обох півосей кожного вала з міжосьовим диференціалом. 3. Привідне обладнання ескалатора за пп. 1 - 2, яке відрізняється тим, що зубчаста передача, яка зв'язує між собою півосі привідних цівкових зірочок, установлених у взаємодії з обома гілками тягових ланцюгів, виконана у вигляді міжколісного диференціала. 4. Привідне обладнання ескалатора по пп.1-3, яке відрізняється тим, що електродвигун установлений на ескалаторі уздовж осі ступінчастого полотна, а його вихідний вал кінематично зв'язаний з міжосьовим диференціалом через карданний вал. Корисна модель відноситься до під'ємнотранспортного устаткування, зокрема к ескалаторам. Відоме привідне обладнання ескалаторів (див. наприклад, Поминов И.Н. Эскалаторы метрополитена. -М.-Транспорт, 1993, стр.47 - 56), у котрому звичайно для переміщення ступінчастого полотна ескалатора використовуються пластинчаті втулочно-роликові ланцюги, що оперізують привідні зірочки, встановлені на головному валу привідного обладнання. Недоліком таких передач з'являється нерівномірність руху ланцюга при заході на зірочку та сході з неї. Можлива плавність руху ланцюга при цьому досягається при використанні зірочок з великою кількістю зубців (біля ЗО), що при кроці тягових ланцюгів на ескалаторах 200мм викликає потрібність мати ділильний діаметр зірочок біля 2,5м. В поєднанні з багатотонними зусиллями в тягових ланцюгах (для ескалаторів великої височини підйому 10 - 15т і більше в кожному ланцюгу) це приводить до утворення значних моментів обертання, для передачі яких потрібні головні вали та привідне обладнання (звичайно, багатоступінчасті зубчасті редуктори) великої маси та габаритів. Такі приводи настільки громіздкі, що звичайно встановлюються поряд з ескалатором, а головні вали навантажені додатково вигинальними моментами від натягнення тягових ланцюгів робочої та холостої віток ескалатора, що при високих вимаганнях до їх жорсткості потребує ще більшого збільшення маси та габаритів. І ще одним суттєвим недоліком цепної передачі з'являється те, що поворот ланок ланцюга при заході на зірочку відбувається при великих питомих тисках в шарнірах ланцюга, що викликає знос поверхні, що треться, та витяжку ланцюга. Відомо «Привідне обладнання ескалатора с тяговим ланцюгом « по авторському свідоцтву СССР № 1526577, МПК В66В 23/02, публікація 23.08.87, в якому як привідний орган для тягових ланцюгів ступінчастого полотна використані цевочні зірочки, розташовані на похилій секції ескалатора при взаємодії через привідний ланцюг з ро СО 1763 бочою та холостою вітками тягового ланцюга Цевочна зірочка при рівних умовах має значно менші габарити, чим звичайна ланцюгова зірочка, та взаємодіє з тяговим ланцюгом на прямолінійній ДІЛЯНЦІ траси, в результаті чого усуваються перечисленні вище недоліки, яки мають звичайні ланцюгові приводи Приведене тут привідне обладнання розглядується нами як прототип заявленого нами обладнання Але, потрібно вказати, що в описаній вище конструкції недоліком з'являється те, що в одночасному зчепленні з тяговим ланцюгом можуть знаходитися не більше 2-х зубців цевочної зірочки, що обумовлює високий контактний тиск на поверхню зубців зірочки та роликів ланцюга Як слідство - вживання такого привода можливо лише в обмеженому діапазоні висот підйому Використання в одному приводі більш ніж один привідний вал в разі зчеплення цевочних зірочок одночасно з робочою та холостою вітками тягових ланцюгів ескалатора не виявляється можливим, бо відстань між встановленими на похилій секції валами з закріпленими на них привідними цевочними зірочками привідного обладнання постійно, а, як слідство, постійна и довжина відрізків обох віток тягового ланцюга на ДІЛЯНЦІ МІЖ ЦИМИ зірочками Для нормальної роботи привода натяг робочої та холостої віток тягового ланцюга на цій ДІЛЯНЦІ ПОВИННІ бути рівні Однак, при роботі ескалатора, через появу на працюючий ВІТЦІ пасажирського навантаження з'являються нерівні навантаження на робочій та холостій вітках, а як слідство, і нерівність величини пружної деформації на обох вітках, що викликає нерівномірність роботи привода цілком, що порушує його внутрішню динаміку Заявлена нами конструкція привідного обладнання ескалатора направлена на усування вказаних недоліків Новий технічний результат міститься в значному (в кілька разів) зниженні контактного тиску між зубцем привідної цевочної зірочки та роликом тягового ланцюга При цьому забезпечується можливість зниження питомого тиску в шарнірах тягового ланцюга на ділянках, де відбувається поворот ланок ланцюга одне відносно другої та, як слідство, і знижується основний знос поверхні тертя для тягових ланцюгів ескалаторів любої висоти підйому, що позитивно впливає на збільшення тривалості служби цих тягових ланцюгів та надійності роботи ескалатора Рівень вказаних питомих тисків в порівнянні з ескалаторами існуючих конструкцій може бути знижений у 20-40 разів (при однакових розмірах шарнірів) Вказаний технічний результат досягається завдяки тому, що привідні цевочні зірочки, встановлені на усіх, зокрема одного валах, встановлені у взаємодії тільки з робочими вітками тягових ланцюгів, а кінематичний зв'язок вихідного вала електродвигуна з валами привідних цевочних зірочок виконаний через МІЖВІСЬОВИЙ диференціал (з забезпеченням надійної суспільної роботи валів цевочних зірочок при рівномірнім розподіленні момента обертання між валами та, ВІДПОВІДНО, рівності контактних тисків між зубцями усіх приводних зірочок та роликами тягового ланцюга, включаючи зубці зірочки, що знаходиться у взаємодії з холостою віткою тягового ланцюга) При взаємодії лише одної привідної зірочки з обома вітками ланцюга, у той час як друга (другі) зірочка (зірочки) взаємодіють тільки з робочою віткою, а також враховуючи розподілення тягових зусиль через МІЖВІСЬОВИЙ диференціал, уся нагрузка на усі зчеплення буде розподілятися рівномірно Даний принцип дозволяє мати компактний вбудований привід для ескалаторів висотою підйому до 75 метрів Наступний технічний результат міститься у зниженні деформації обертання та зниженні вигинального моменту, впливаючих на вали, що досягається виконанням кожного із валів привідних цевочних зірочок у вигляді полувісей, зв'язаних між собою зубчастою передачею з забезпеченням одночасного кінематичного зв'язку обох полувісей кожного валу з МІЖВІСЬОВИМ диференціалом Далі, віддається перевага такому виконанню конструкції, щоб зубчаста передача, що зв'язує між собою полувісі привідних цевочних зірочок, встановлених у взаємодії з обома вітками тягових ланцюгів, була виконана у вигляді міжколесного диференціала І нарешті, наступний технічний результат - компактне розміщення привідного обладнання, рівномірний розподіл навантажень на опори та рівномірність передачі вигинального моменту досягається тому, що електродвигун розміщено на ескалаторі по уздовжній ВІСІ ступінчастого полотна, а його вихідний вал з'єднано кінематичне з МІЖВІСЬОВИМ диференціалом через карданний вал На прикладеному кресленні (Фіг) в аксонометричній проекції приведено схематичне зображення заявляемого обладнання у варіанті з двома валами привідних цевочних зірочок, виконаних у вигляді полувісей (як було сказано вище, можливо обладнання трьох і більше валів з привідними цевочними зірочками) Електродвигун 1 кінематичне зв'язаний через карданний вал 2 та систему зубчастих передач (на кресленні не показана, може мати будь яке виконання) з МІЖВІСЬОВИМ диференціалом З В приведеному тут виконанні вихідний вал 4 МІЖВІСЬОВОГО диференціала 3 виконаний коаксіальним (хоча можуть мати місце і другі види виконання), де ЗОВНІШНІЙ вал 5 коаксиального вала 4 через конічну зубчасту пару 6, 7 зв'язаний з шестернею 8, що знаходиться у зчепленні з зубчастим колесом 9, закріпленим разом на полувісях 10 і 11, розташованого на верхній ДІЛЯНЦІ похилої секції валу привідних цевочних зірочок, а внутрішній вал 12 коаксіального валу 4 через конічну зубчасту пару 13, 14 зв'язаний з шестернею 15, що знаходиться у зчепленні з міжколесним диференціалом 16, зв'язаним одночасно з полувісями 17 та 18 найбільш віддаленого від привідного обладнання ескалатора вала привідних зірочок При чому, на полувісях 10, 11 встановлені привідні цевочні зірочки, ВІДПОВІДНО, 19 та 20, а на полувісях 17 та 18 встановлені привідні цевочні зірочки, ВІДПОВІДНО, 21 та 22, при чому в той час, як зірочки 21, 22 встановлені у взаємодії як з робочою, так і з холостою вітками тягових ланцюгів 23, 24 ступінчастого полотна, зірочки 19, 20 встановлені у взаємодії тільки з робочими вітками цих ланцюгів 23, 24 1763 Обладнання працює таким образом При включенні електродвигуна 1 привідного обладнання ескалатора обертання від його вихідного вала через карданний вал 2 та систему зубчастих передач передається на МІЖВІСЬОВИЙ диференціал З Далі, ЗОВНІШНІЙ вал 5 вихідного коаксиального валу 4 МІЖВІСЬОВОГО диференціалу 3 передає обертання через зубчасту пару 6,7, шестерню 8, зубчасте колесо 9 та полувісі 10 і 11 на зірочки 19, 20 та 6 тягові ланцюги 23, 24, а внутрішній вал 12 вихідного коаксіального валу 4 МІЖВІСЬОВОГО диференціалу 3 передає обертання через зубчасту пару 13, 14, шестерню 15, міжколесний диференціал 16 та полувісі 17,18 на зірочки 21,22 тих же тягових ланцюгів 23, 24, в результаті чого виникає переміщення сходин ступінчастого полотна ескалатора по їх направляючим (не показані) 23 21 Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236 - 47 - 24
ДивитисяДодаткова інформація
Автори англійськоюKhristich Viktor Konstantinovich
Автори російськоюХристич Виктор Константинович
МПК / Мітки
МПК: B66B 23/00
Мітки: привідне, ескалатора, обладнання
Код посилання
<a href="https://ua.patents.su/4-1763-prividne-obladnannya-eskalatora.html" target="_blank" rel="follow" title="База патентів України">Привідне обладнання ескалатора</a>
Обладнання для стопоріння тягового ланцюга конвеєра, наприклад ескалатора, у випадку його обриву
Номер патенту: 1764
Опубліковано: 15.05.2003
Автори: Кірєєв Юрій Владіміровіч, Хрістіч Віктор Константіновіч
МПК: B66B 29/00, B65G 43/06
Мітки: наприклад, конвеєра, стопоріння, ескалатора, тягового, випадку, обладнання, ланцюга, обриву
Формула / Реферат:
Обладнання для стопоріння тягового ланцюга конвеєра, наприклад ескалатора, у випадку його обриву, яке має закріплені на металоконструкції ескалатора стопорний елемент, встановлений з можливістю взаємодії з тяговим ланцюгом, та слідкуючий елемент, контактуючий з втулками тягового ланцюга, який відрізняється тим, що стопорний елемент виконано у вигляді зубчатого сектора, зубці якого повернені під кутом до втулок тягового ланцюга, і...
Натяжне обладнання ескалатора
Номер патенту: 1193
Опубліковано: 15.04.2002
Автор: Хрістіч Віктор Константіновіч
МПК: B66B 23/00
Мітки: ескалатора, натяжне, обладнання
Формула / Реферат:
1. Натяжне обладнання ескалатора, яке включає установлену на валу натяжну зірочку тягового ланцюга ступінчастого полотна ескалатора та натяжний елемент, а також поліспастну систему, рухливий блок якої установлено на валу натяжної зірочки, а нерухомий блок і один із кінців поліспастної системи закріплені на металоконструкції ескалатора, яке відрізняється тим, що воно має установлений на металоконструкції ескалатора стопорний механізм, в який...
Поручень ескалатора та його привідний механізм
Номер патенту: 1761
Опубліковано: 15.05.2003
Автор: Хрістіч Віктор Константіновіч
МПК: B66B 23/22, B66B 23/00
Мітки: поручень, механізм, привідний, ескалатора
Формула / Реферат:
1. Поручень ескалатора, який має С-подібний переріз з закругленими бортами та містить закріплений вздовж нижньої його сторони тяговий елемент з можливістю взаємодії поручня з його привідним механізмом, який відрізняється тим що він має поперечно встановлені усередині його по всій його довжині опорні вкладиші, контур зовнішньої поверхні яких виконаний відповідно до внутрішнього контуру поперечного перерізу поручня, на внутрішніх сторонах...
Ескалатор
Номер патенту: 1762
Опубліковано: 15.05.2003
Автор: Хрістіч Віктор Константіновіч
МПК: B66B 23/00
Мітки: ескалатор
Формула / Реферат:
Ескалатор, який містить зв’язані між собою похилу та верхню і нижню горизонтальні секції з розміщеними на них сходинами ступінчастого полотна, шарнірно з'єднаними з ланками втулково-роликових тягових ланцюгів, нескінченно замкнутих навколо установлених на горизонтальних секціях кінцевих відхиляючих елементів, і розміщений на похилій секції принаймні один привідний механізм ескалатора, виконаний у вигляді привідних цівкових зірочок, кожна із...
Металоконструкція ескалатора
Номер патенту: 981
Опубліковано: 16.07.2001
Автор: Хрістіч Віктор Константіновіч
МПК: B66B 21/00
Мітки: ескалатора, металоконструкція
Формула / Реферат:
1. Металоконструкція ескалатора, що встановлена на фундаменті та утримуюча верхню горизонтальну секцію та похилу секцію, яка відрізняється тим, що верхня ділянка донної частини похилої секції виконана роз‘ємною відносно останньої частини цієї секції, і один кінець роз‘ємної ділянки шарнірно з‘єднаний з нероз‘ємною донною частиною, а на другому кінці його створено стикувальний вузол, який виконаний з можливістю зчеплення з аналогічним...
Попередній патент: Ескалатор
Наступний патент: Комплектний розподільчий пристрій квм-10
Випадковий патент: Спосіб визначення температури контактної взаємодії поверхонь вузла тертя