Спосіб керування електромаховичним двигуном постійного струму в режимі двосторонніх включень
Номер патенту: 10508
Опубліковано: 25.12.1996
Автори: Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович
Формула / Реферат
1. Способ управления электромаховичным двигателем (ЭМД) постоянного тока в режиме двусторонних включений, содержащий операции включения и выключения ЭМД по сигналам системы управления ориентацией, отличающийся тем, что разбивают рабочий диапазон угловой скорости маховика на ряд интервалов, измеряют угловую скорость маховика W и величину напряжения питания ЭМД U формируют в зависимости от номера интервала і, в котором в момент включения ЭМД находилась угловая скорость W.
2. Способ по п. 1, отличающийся тем, что для формирования положительного (отрицательного) заданного значения электромагнитного момента Мэмз(-Мэмз) прикладывают к обмотке статора ЭМД напряжение Un (Uо) в соответствии с выражением:
где rа - активное сопротивление обмотки статора ЭМД;
См - коэффициент пропорциональности;
Ф - величина магнитного потока;
Cе - коэффициент пропорциональности;
Wі - постоянная величина угловой скорости маховика, соответствующая і-тому интервалу.
3. Способ по п. 1, отличающийся тем, что снимают экспериментально зависимость Un(Uo) от номера интервала из условия обеспечения требуемого значения Мэмз(-Мэмз) и допуска на его изменение.
4. Способ по пп. 1,2,3, отличающийся тем, что напряжения питания ЭМД Un и Uo изменяют при помощи изменения числа последовательно коммутируемых элементов аккумуляторной батареи, причем число последовательно подключаемых элементов тем больше, чем больше требуемое напряжение.
5. Способ по пп. 1, 2, 3, отличающийся тем, что напряжение питания ЭМД изменяют при помощи подключения последовательно с обмоткой ЭМД активного сопротивления, величина которого зависит от порядкового номера интервала, в пределах которого находятся угловая скорость маховика в момент включения ЭМД.
6. Способ по п. 5, отличающийся тем, что при обратном включении ЭМД в режиме его двустороннего включения, к обмотке ЭМД подключают активные сопротивления, величины которых зависят от интервала, в котором находится угловая скорость маховика, при этом угловая скорость маховика должна быть больше чем
Текст
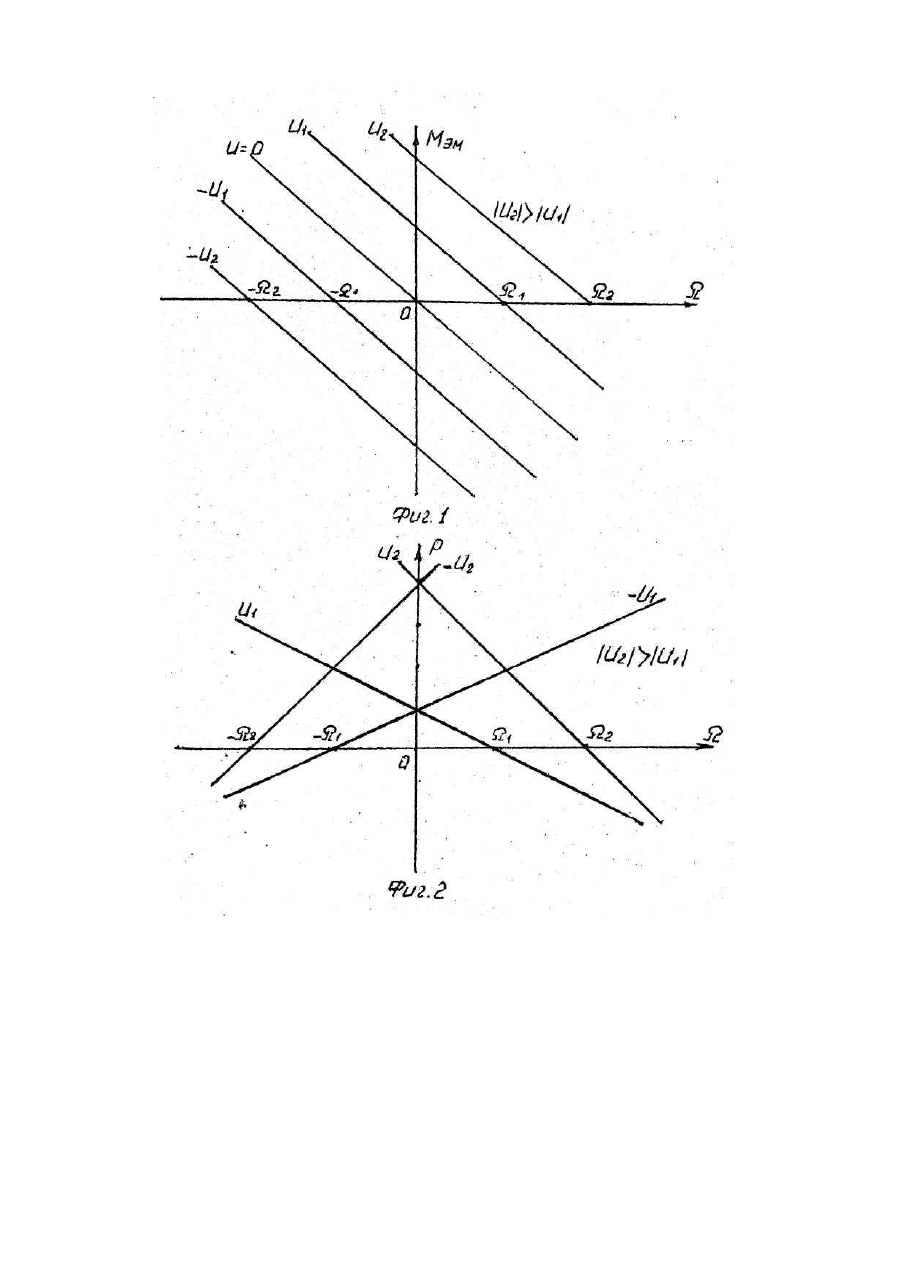
Изобретение относится к автоматическому управлению и может найти применение для прецизионной ориентации в пространстве космических объектов с помощью электромаховичных двигателей (ЭМД) постоянного тока с постоянными магнитами, Прототипом является известный способ управления ЭМД постоянного тока, при выполнении которого включают и выключают ЭМД по сигналам системы управления ориентацией, измеряют ток в обмотке ЭМД и сравнивают с заданной величиной, соответствующей заданному значению управляющего момента, при токе большем заданного значения ЭМД выключают, даже если по сигналу системы управления ориентацией ЭМД должен быть включен. Таким образом, ток в обмотке ЭМД не может превысить заданного значения, а, следовательно, управляющий момент не может превысить заданного значения. Недостатком известного способа прототипа является то, что: имеется расход энергии при включенном по сигналам системы управления ориентацией ЭМД на коммутирующих и измерительных элементах системы слежения за величиной тока; энергия расходуется как при прямом включении ЭМД (в направлении увеличения скорости вращения маховика), так и при обратном включении ЭМД (в направлении торможения скорости вращения маховика) при двусторонних включениях ЭМД в режиме прецизионной ориентации, когда зона нечувствительности релейного элемента системы управления ориентацией мала или просто отсутствует; механическая характеристика ЭМД, т.е. зависимость управляющего момента от скорости вращения маховика теряет свойство уменьшаться с увеличением его скорости, что, как известно, способствует демпфированию колебаний аппарата около требуемого направления и особенно ценно в прецизионных режимах. Задача изобретения - устранение пульсаций управляющего момента, снижение расхода энергий, особенно при двусторонних включениях ЭМД, сохранение падающего характера механической характеристики ЭМД. Задача достигается тем, что в известном способе управления ЭМД постоянного тока, включающем операции включения и выключения ЭМД по сигналам системы ориентации, разбивают рабочий интервал угловой скорости маховика на подинтервалы, измеряют угловую скорость маховика и напряжение питания ЭМД при его включении делают зависимым от подынтервала, в котором в момент включения ЭМД находилась угловая скорость маховика. Первый частный случай предлагаемого способа заключается в том, что напряжение питания ЭМД изменяют при помощи изменения числа последовательно коммутируемых элементов аккумуляторной батареи. Второй частный случай предлагаемого способа заключается в том, что напряжение питания ЭМД изменяют при помощи подключения последовательно с обмоткой двигателя активного сопротивления в зависимости от порядкового номера подинтервала. Третий частный случай предлагаемого способа заключается в том, что при обратном включении ЭМД в режиме его двусторонних включений к обмотке двигателя вместо напряжения подключают активное сопротивление. Это позволяет управлять ЭМД при отсутствии отдельных элементов аккумулятора. Сущность изобретения поясняется рисунками, где на фиг.1 и фиг.2 изображены соответственно механическая и энергетическая характеристики ЭМД постоянного тока (при этом приняты следующие обозначения: Мэм и Р электромагнитный момент и мощность ЭМД, W - относительная угловая скорость вращения маховика, UI - напряжение питания (i=1;2); W1 и W2 - скорости, при которых электродвижущая сила становится равной напряжению питания. Для уменьшения потерь на вихревые токи и гистерезис ЭМД постоянного тока выполняют с диэлектрическим статором, состоящим из обмотки, пропитанной эпоксидной смолой с высокой теплопроводностью. При таком выполнении электрической машины влиянием индуктивности и взаимоиндуктивности элементов обмотки статора можно пренебречь и рассматривать принцип ее работы аналогично коллекторному двигателю постоянного тока. Напряжение U, приложенное к обмотке электродвигателя постоянного тока, уравновешивается противоэлектродвижущей силой Еа и падением напряжения І аrа на активном сопротивлении обмотки. Электродвижущая сила Еа пропорциональна относительной угловой скорости ротора W (в нашем случае маховика) по отношению к статору и полному магнитному потоку Ф: где Со - постоянный коэффициент, пропорциональный числу пар полюсов и числу проводников обмотки якоря. Электромагнитный момент, развиваемый двигателем, равен: где См - постоянный коэффициент, пропорциональный как и Се числу пар полюсов и числу проводников обмотки якоря. Полная мощность, потребляемая из электросети электродвигателем, равна Из уравнений (1), (2), (3), (4) определяем выражение для вращающего электромагнитного момента и потребляемой мощности через напряжение U и относительную угловую скорость W маховика относительно корпуса КА: На фиг. 1 и фиг.2 в соответствии с (5) и (6) представлены графики механической Мэм = f 1(W) и энергетической Р = f 2 (W) характеристики для положительных и отрицательных значений U при I U1 I 0, ему соответствует уравнение (16). Будем считать, что Un = U > Се Ф W, т.е. при максимальной скорости Wmах электродвижущая сила не превосходит напряжение питания, а, следовательно, при прямом включении создается электромагнитный момент положительной полярности, что соответствует уравнению (5) при подставке ra+R вместо rа. Из (16) видно, что при возрастании угловой скорости W величина Rn должна падать. Как при минимальной скорости W=0, так и в конце диапазона ее изменения Wmах добавочное сопротивление должно быть не меньше нуля. Для этого из (16) должны выполняться два условия: Из (18) и (19) видно, что, если выполняется уравнение (19), то (18) выполняется автоматически. При одном и том же двигателе и заданном Qmax условие (19) может быть выполнено при надлежащем подборе Un и/или Мэмз. Считаем, что условие (19) выполняется и известны Un=const и Мэмз. При наличии добавочного сопротивления R, последовательно подключенного к обмотке статора, уравнения (5) и (6) примут следующий вид: Если допускается в процессе управления ориентацией аппарата изменение электромагнитного момента ЭМД в пределах ±DМэм, тогда из (20) следует, что при R=const и U=const допустимое изменение угловой скорости W равно: Из {22) видно, что допустимые интервалы изменения угловой скорости W, в которых при U=const и R=const изменение электромагнитного момента не выходит на заданные пределы ± D Мэм, зависят от величины дополнительного сопротивления R, чем больше R, тем больше допустимый интервал изменения угловой скорости. Для выполнения предлагаемого способа вначале при Ф=0 из уравнения (16) определяют Rn1, соответствующее первому интервалу I=1. Затем определяют концы первого интервала по угловой скорости W из уравнения (22); Подставив в уравнение (16) вместо W величину D Wi2 (правое крайнее значение первого интервала) и Мэмз + DМэм (максимальное допустимое значение электромагнитного момента), определяем величину Rn2, а затем из уравнения (22) ширину второго интервала по формуле Правое крайнее значение второго интервала будет равно: Вновь, используя это значение скорости и величину Мэмз + DМэм, находим значение дополнительного сопротивления для третьего интервала из (16), а затем аналогично вышеописанному его ширину и правое крайнее значение третьего интервала и т.д., пока не будет найден интервал, куда попадает максимальное значение скорости Wmax из рабочего диапазона. Из уравнений (20) и (21) следует, что при таком способе управления при прямом включении ЭМД потребляемая мощность на единицу электромагнитного момента озона Формулы (26) и (10) по виду совпадают, однако по содержанию они разные. Во втором случае (26) Un = const и по существу соответствует максимальной величине Un при использовании элементов аккумулятора, т.е. при малых скоростях W энергопотребление с дополнительными сопротивлениями больше, чем при использовании элементов аккумулятора. Из (26) следует, что при использовании дополнительных сопротивлений потребление электроэнергии не зависит от скорости W при прямых включениях ЭМД. Теперь рассмотрим режим обратного включения ЭМД для W>0, ему соответствует уравнение (17). Добавочное сопротивление Ro должно быть по смыслу только положительное, Напряжение Uo по абсолютной величине равно I U I и больше чем электродвижущая сила I Се Ф Q I. Поэтому полярность напряжения Uo должна быть отрицательной, т.е. уравнение (17) можно записать следующим образом (при W> 0): На первом интервале изменения угловой скорости при W=0 добавочное сопротивление, как следует из (27) должно быть равно Из (27) видно, что при возрастании угловой скорости величина должна возрастать. Подставив в (22) полученное значение Ro1 определяем первый интервал угловой скорости для обратного включения ЭМД: Длина последующих интервалов будет, равна, аналогично как (25), а именно: где индекс I обозначает номер интервала (i=2,3...). Подставив в уравнение (17) вместо Uo величину - I U I, W=DW12 и Мэм3 - D Мэм, получаем величину добавочного сопротивления Ro2 для второго интервала, а саму величину второго интервала DW2 определяем из уравнения (31), подставив вместо Rо1 полученную величину Rо2. Правый конец второго интервала будет равен Аналогично вышеописанному определяется величина Ro3 и W32 и т.д. Как видно из (17), учтя, что Uo = - I U I, добавочное сопротивление увеличивается с увеличением угловой скорости W, а, следовательно, (см.(31)) увеличивается и величина самих интервалов по скорости W с увеличением порядкового номера интервала при обратных включениях ЭМД. Из уравнений (16) и (17) при учете, что Uo = -IUI следует, что Rn и Ro при возрастании W соответственно уменьшаются и увеличиваются, аналогичный закон имеет место и для величин интервалов по скорости для прямого и обратного включения ЭМД. Из (20) и (21) следует, что при обратном включении ЭМД, как и при прямом, мощность, расходуемая на единицу электромагнитного момента, не зависит от скорости вращения и равна Таким образом, при использовании дополнительных сопротивлений электроэнергия потребляется из сети как при прямом, так и при обратном включении ЭМД, т.е. нет режима генератора. Энергия не будет потребляться из сети, если при обратном включении ЭМД вместо подключения напряжения Uo = -IUI подключать сопротивление R. Тогда при обратном включении ЭМД электромагнитный момент будет равен (используя (5): Для того, чтобы Мэм был равен заданному значению, необходимо подключать сопротивление, равное следующему: Из (35) видно, что заданный момент Мэмз может быть получен только при достижении определенной скорости Wmin, т.к. R должно быть равно или больше нуля: При W
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of electro-flywheel engine of direct current in mode of double-sided starts
Автори англійськоюAnuprienko Hennadii Yefremovych, Karpachov Yurii Andriiovych
Назва патенту російськоюСпособ управления электромаховичным двигателем постоянного тока в режиме двусторонних включений
Автори російськоюАнуприенко Геннадий Ефремович, Карпачев Юрий Андреевич
МПК / Мітки
МПК: B64G 1/40
Мітки: двосторонніх, включень, спосіб, постійного, електромаховичним, двигуном, режимі, керування, струму
Код посилання
<a href="https://ua.patents.su/6-10508-sposib-keruvannya-elektromakhovichnim-dvigunom-postijjnogo-strumu-v-rezhimi-dvostoronnikh-vklyuchen.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування електромаховичним двигуном постійного струму в режимі двосторонніх включень</a>
Пристрій для керування електричним режимом дугової сталеплавильної печі постійного струму
Номер патенту: 3022
Опубліковано: 26.12.1994
Автори: Саньков Сергій Анатолійович, Магда Володимир Васильович, Філіпов Олексій Костянтинович, Маш'янов Володимир Гаврилович, Малиновський Володимир Сергійович
МПК: H05B 7/148
Мітки: електричним, постійного, керування, пристрій, дугової, печі, сталеплавильної, режимом, струму
Формула / Реферат:
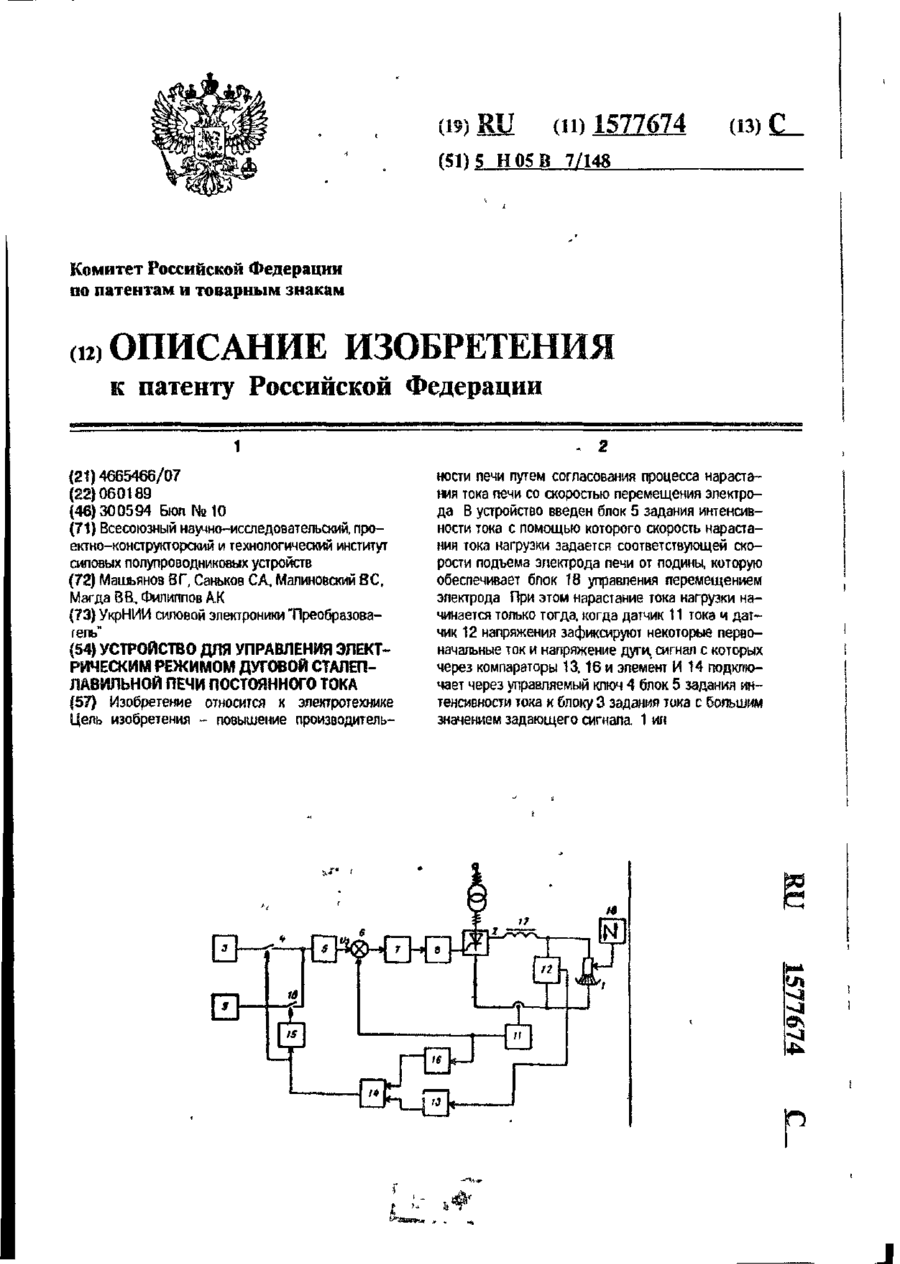
Устройство для управления электрическим режимом дуговой сталеплавильной печи постоянного тока, содержащее блок управления перемещением электрода, датчик тока электрода, выход которого соединен с первым входом блока сравнения, соединенного выходом с входом регулятора тока, выход которого соединен с входом системы импульсно-фазового управления источника питания, первый и второй блоки задания тока, первый и второй управляемые ключи и датчик...
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: двигуном, асинхронним, частотного, керування, спосіб
Формула / Реферат:
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Електропривід постійного струму
Номер патенту: 8872
Опубліковано: 30.09.1996
Автори: Кутрань Ігор Сергійович, Мороз Юрій Вікторович, Янченко Леонід Петрович
МПК: H02P 7/06
Мітки: електропривід, струму, постійного
Формула / Реферат:
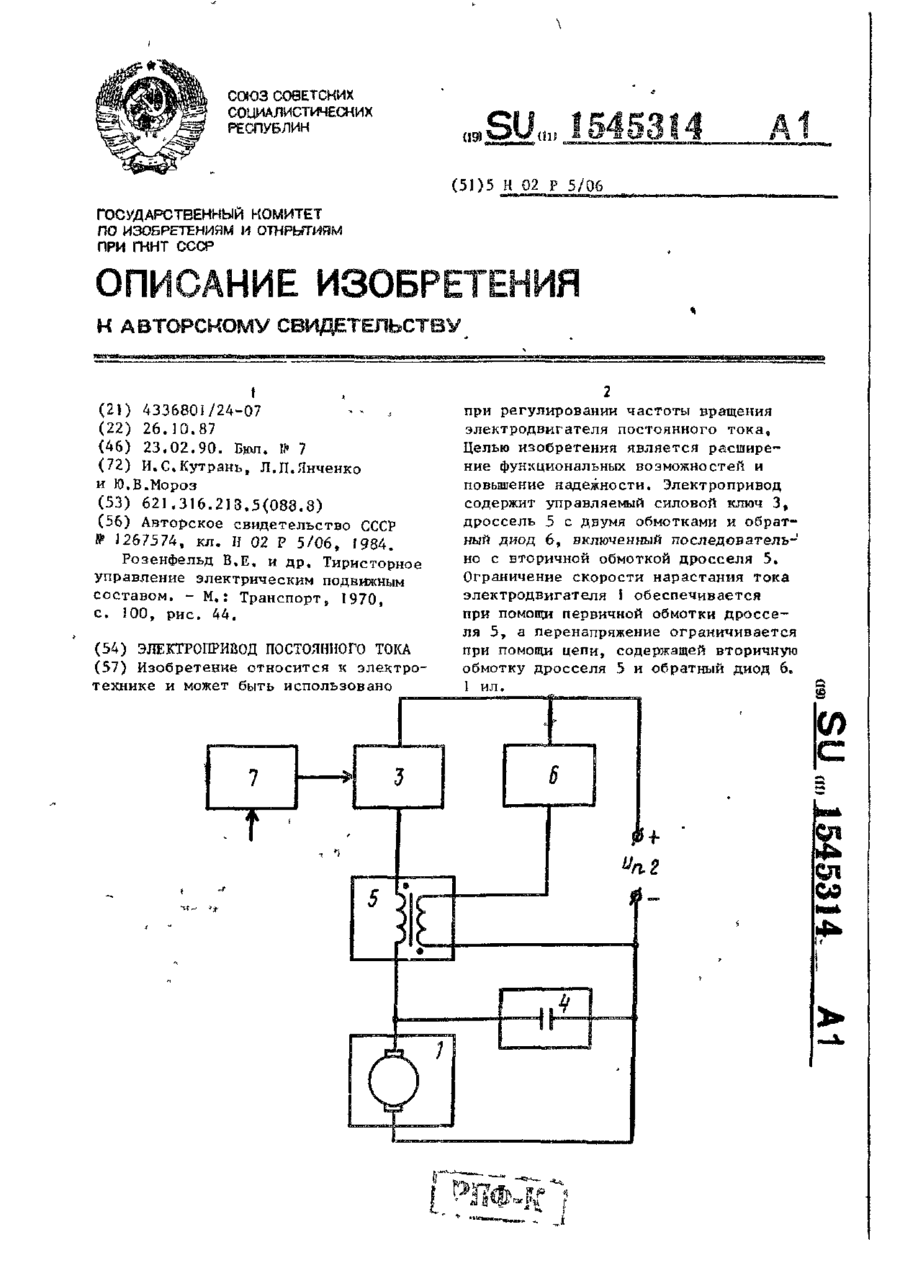
Электропривод постоянного тока, содержащий электродвигатель, первым выводом подключенный к первому выводу источника питания, управляемый силовой ключ, первым выводом подключенный к второму выводу источника питания, конденсатор, дроссель с двумя обмотками и диод, включенный последовательно с вторичной обмоткой дросселя, отличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности, конденсатор подключен...
Електропривод постійного струму
Номер патенту: 6724
Опубліковано: 29.12.1994
Автор: Кутрань Ігор Сергійович
МПК: H02P 7/06
Мітки: струму, електропривод, постійного
Формула / Реферат:
(57) Электропривод постоянного тока, содержащий электродвигатель, первым выводом подключенный к первому выводу источника питания, первый управляемый силовой ключ, первым выводом подключенный к второму выводу источника питания, дроссель, начало и конец первичной обмотки которого соединен с вторыми выводами соответственно первого управляемого силового ключа и электродвигателя, диод, конденсатор, подключенный параллельно электродвигателю и блок...
Перетворювач енергії змінного струму на вході в енергію постійного струму на виході для живлення дугового навантаження
Номер патенту: 3021
Опубліковано: 26.12.1994
Автори: Саньков Сергій Анатолійович, Магда Володимир Васильович, Маш'янов Володимир Гаврилович, Бродський Гелій Михайлович
МПК: H05B 7/144, H02M 7/10
Мітки: перетворювач, змінного, дугового, постійного, енергії, енергію, виході, вході, струму, навантаження, живлення
Формула / Реферат:
Преобразователь энергии переменного тока на входе в энергию постоянного тока на выходе для питания дуговой нагрузки, содержащий первую и вторую трехфазные нулевые управляемые вентильные группы, выводы переменного тока которых предназначены для соединения через вторичные обмотки питающего трансформатора, и уравнительный реактор с первым выводом для подключения нагрузки, трехфазную мостовую неуправляемую вентильную группу, выводы переменного...
Попередній патент: Спосіб кількісного визначення ітрію в оксиді скандію
Наступний патент: Електроакустичний пристрій
Випадковий патент: Метальник сипучих матеріалів