Спосіб визначення кутових координат джерела оптичного випромінювання
Номер патенту: 22866
Опубліковано: 25.04.2007
Автори: Воронько Андрій Олександрович, Потапова Галина Костянтинівна
Формула / Реферат
Спосіб визначення кутових координат джерела оптичного випромінювання, що полягає у тому, що випромінювання джерела за допомогою оптичної системи фокусують на позиційно-чутливу матрицю у пляму розміром більше одного елемента матриці, на елементах матриці перетворюють оптичні сигнали в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів від елементів матриці кожного непарного рядка, розташованих у непарних стовпцях, сумам електричних сигналів від елементів матриці кожного парного рядка, розташованих у парних стовпцях, сумам електричних сигналів від елементів матриці кожного непарного стовпця, розташованих у парних рядках, сумам електричних сигналів від елементів матриці кожного парного стовпця, розташованих у непарних рядках, зазначені сумарні електричні сигнали порівнюють із порогом, за результатами цього порівняння ухвалюють рішення щодо наявності світлової плями на відповідному елементі або групі елементів матриці, а за положенням світлової плями на матриці визначають кутові координати джерела випромінювання, який відрізняється тим, що додатково визначають стовпець та рядок, у яких сумарні електричні сигнали найбільші, визначають, у якому із сусідніх зі стовпцем та рядком з найбільшими сумарними електричними сигналами сигнал більший, визначають відношення електричних сигналів зі стовпця та рядка з найбільшими сигналами до сумарного електричного сигналу з тим із сусідніх стовпців та рядків, сумарний сигнал з якого більший, ніж з іншого, а положення світлової плями на матриці і кутове положення джерела оптичного випромінювання уточнюють в залежності від величини вказаних відношень.
Текст
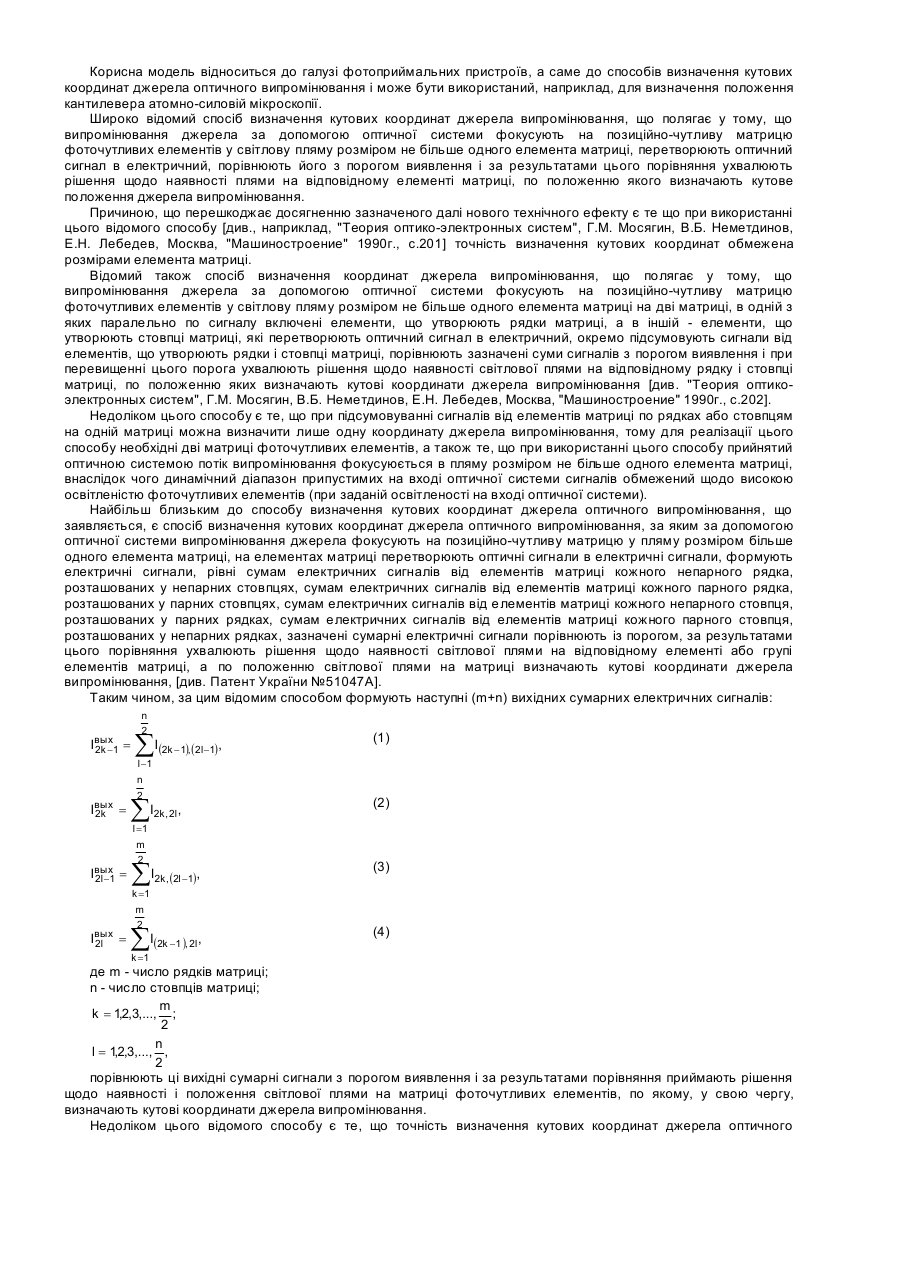
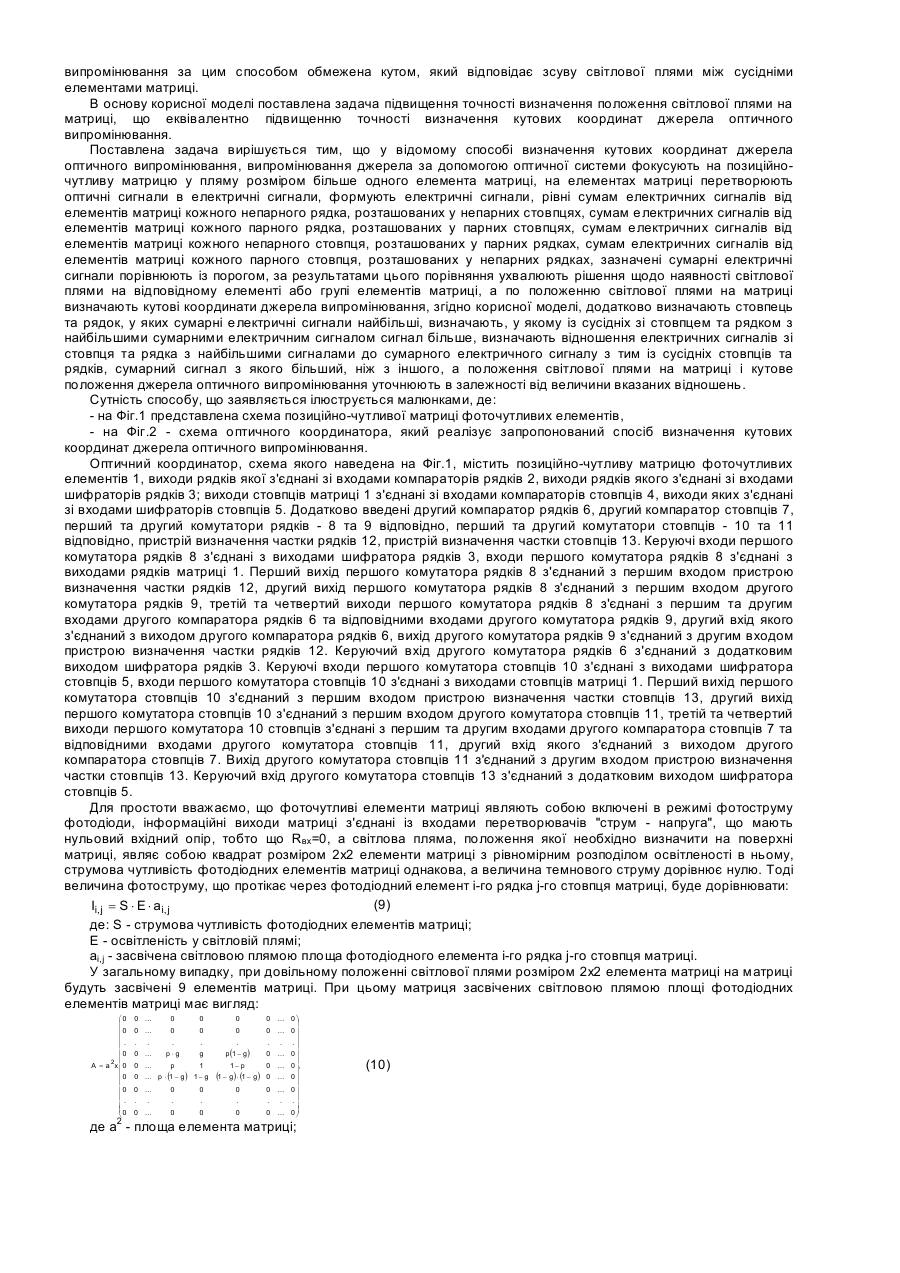
Корисна модель відноситься до галузі фотоприймальних пристроїв, а саме до способів визначення кутових координат джерела оптичного випромінювання і може бути використаний, наприклад, для визначення положення кантилевера атомно-силовій мікроскопії. Широко відомий спосіб визначення кутових координат джерела випромінювання, що полягає у тому, що випромінювання джерела за допомогою оптичної системи фокусують на позиційно-чутливу матрицю фоточутливих елементів у світлову пляму розміром не більше одного елемента матриці, перетворюють оптичний сигнал в електричний, порівнюють його з порогом виявлення і за результатами цього порівняння ухвалюють рішення щодо наявності плями на відповідному елементі матриці, по положенню якого визначають кутове положення джерела випромінювання. Причиною, що перешкоджає досягненню зазначеного далі нового технічного ефекту є те що при використанні цього відомого способу [див., наприклад, "Теория оптико-электронных систем", Г.М. Мосягин, В.Б. Неметдинов, Е.Н. Лебедев, Москва, "Машиностроение" 1990г., с.201] точність визначення кутових координат обмежена розмірами елемента матриці. Відомий також спосіб визначення координат джерела випромінювання, що полягає у тому, що випромінювання джерела за допомогою оптичної системи фокусують на позиційно-чутливу матрицю фоточутливих елементів у світлову пляму розміром не більше одного елемента матриці на дві матриці, в одній з яких паралельно по сигналу включені елементи, що утворюють рядки матриці, а в іншій - елементи, що утворюють стовпці матриці, які перетворюють оптичний сигнал в електричний, окремо підсумовують сигнали від елементів, що утворюють рядки і стовпці матриці, порівнюють зазначені суми сигналів з порогом виявлення і при перевищенні цього порога ухвалюють рішення щодо наявності світлової плями на відповідному рядку і стовпці матриці, по положенню яких визначають кутові координати джерела випромінювання [див. "Теория оптикоэлектронных систем", Г.М. Мосягин, В.Б. Неметдинов, Е.Н. Лебедев, Москва, "Машиностроение" 1990г., с.202]. Недоліком цього способу є те, що при підсумовуванні сигналів від елементів матриці по рядках або стовпцям на одній матриці можна визначити лише одну координату джерела випромінювання, тому для реалізації цього способу необхідні дві матриці фоточутливих елементів, а також те, що при використанні цього способу прийнятий оптичною системою потік випромінювання фокусуюється в пляму розміром не більше одного елемента матриці, внаслідок чого динамічний діапазон припустимих на вході оптичної системи сигналів обмежений щодо високою освітленістю фоточутливих елементів (при заданій освітленості на вході оптичної системи). Найбільш близьким до способу визначення кутових координат джерела оптичного випромінювання, що заявляється, є спосіб визначення кутових координат джерела оптичного випромінювання, за яким за допомогою оптичної системи випромінювання джерела фокусують на позиційно-чутливу матрицю у пляму розміром більше одного елемента матриці, на елементах матриці перетворюють оптичні сигнали в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів від елементів матриці кожного непарного рядка, розташованих у непарних стовпцях, сумам електричних сигналів від елементів матриці кожного парного рядка, розташованих у парних стовпцях, сумам електричних сигналів від елементів матриці кожного непарного стовпця, розташованих у парних рядках, сумам електричних сигналів від елементів матриці кожного парного стовпця, розташованих у непарних рядках, зазначені сумарні електричні сигнали порівнюють із порогом, за результатами цього порівняння ухвалюють рішення щодо наявності світлової плями на відповідному елементі або групі елементів матриці, а по положенню світлової плями на матриці визначають кутові координати джерела випромінювання, [див. Патент України №51047А]. Таким чином, за цим відомим способом формують наступні (m+n) вихідних сумарних електричних сигналів: Iвых1 = 2k n 2 åI ( 2k - 1), (2l -1), (1) l -1 Iвых = 2k n 2 åI 2k , 2l , (2) l =1 Iвых = 2l -1 m 2 åI 2k , (2l -1), (3) k =1 Iвых = 2l m 2 åI( 2k -1 ), 2l , (4) k =1 де m - число рядків матриці; n - число стовпців матриці; m k = 1,2,3,..., ; 2 n l = 1,2,3,..., , 2 порівнюють ці вихідні сумарні сигнали з порогом виявлення і за результатами порівняння приймають рішення щодо наявності і положення світлової плями на матриці фоточутливих елементів, по якому, у свою чергу, визначають кутові координати джерела випромінювання. Недоліком цього відомого способу є те, що точність визначення кутових координат джерела оптичного випромінювання за цим способом обмежена кутом, який відповідає зсуву світлової плями між сусідніми елементами матриці. В основу корисної моделі поставлена задача підвищення точності визначення положення світлової плями на матриці, що еквівалентно підвищенню точності визначення кутових координат джерела оптичного випромінювання. Поставлена задача вирішується тим, що у відомому способі визначення кутових координат джерела оптичного випромінювання, випромінювання джерела за допомогою оптичної системи фокусують на позиційночутливу матрицю у пляму розміром більше одного елемента матриці, на елементах матриці перетворюють оптичні сигнали в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів від елементів матриці кожного непарного рядка, розташованих у непарних стовпцях, сумам електричних сигналів від елементів матриці кожного парного рядка, розташованих у парних стовпцях, сумам електричних сигналів від елементів матриці кожного непарного стовпця, розташованих у парних рядках, сумам електричних сигналів від елементів матриці кожного парного стовпця, розташованих у непарних рядках, зазначені сумарні електричні сигнали порівнюють із порогом, за результатами цього порівняння ухвалюють рішення щодо наявності світлової плями на відповідному елементі або групі елементів матриці, а по положенню світлової плями на матриці визначають кутові координати джерела випромінювання, згідно корисної моделі, додатково визначають стовпець та рядок, у яких сумарні електричні сигнали найбільші, визначають, у якому із сусідніх зі стовпцем та рядком з найбільшими сумарними електричним сигналом сигнал більше, визначають відношення електричних сигналів зі стовпця та рядка з найбільшими сигналами до сумарного електричного сигналу з тим із сусідніх стовпців та рядків, сумарний сигнал з якого більший, ніж з іншого, а положення світлової плями на матриці і кутове положення джерела оптичного випромінювання уточнюють в залежності від величини вказаних відношень. Сутність способу, що заявляється ілюструється малюнками, де: - на Фіг.1 представлена схема позиційно-чутливої матриці фоточутливих елементів, - на Фіг.2 - схема оптичного координатора, який реалізує запропонований спосіб визначення кутових координат джерела оптичного випромінювання. Оптичний координатор, схема якого наведена на Фіг.1, містить позиційно-чутливу матрицю фоточутливих елементів 1, виходи рядків якої з'єднані зі входами компараторів рядків 2, виходи рядків якого з'єднані зі входами шифраторів рядків 3; виходи стовпців матриці 1 з'єднані зі входами компараторів стовпців 4, виходи яких з'єднані зі входами шифраторів стовпців 5. Додатково введені другий компаратор рядків 6, другий компаратор стовпців 7, перший та другий комутатори рядків - 8 та 9 відповідно, перший та другий комутатори стовпців - 10 та 11 відповідно, пристрій визначення частки рядків 12, пристрій визначення частки стовпців 13. Керуючі входи першого комутатора рядків 8 з'єднані з виходами шифратора рядків 3, входи першого комутатора рядків 8 з'єднані з виходами рядків матриці 1. Перший вихід першого комутатора рядків 8 з'єднаний з першим входом пристрою визначення частки рядків 12, другий вихід першого комутатора рядків 8 з'єднаний з першим входом другого комутатора рядків 9, третій та четвертий виходи першого комутатора рядків 8 з'єднані з першим та другим входами другого компаратора рядків 6 та відповідними входами другого комутатора рядків 9, другий вхід якого з'єднаний з виходом другого компаратора рядків 6, вихід другого комутатора рядків 9 з'єднаний з другим входом пристрою визначення частки рядків 12. Керуючий вхід другого комутатора рядків 6 з'єднаний з додатковим виходом шифратора рядків 3. Керуючі входи першого комутатора стовпців 10 з'єднані з виходами шифратора стовпців 5, входи першого комутатора стовпців 10 з'єднані з виходами стовпців матриці 1. Перший вихід першого комутатора стовпців 10 з'єднаний з першим входом пристрою визначення частки стовпців 13, другий вихід першого комутатора стовпців 10 з'єднаний з першим входом другого комутатора стовпців 11, третій та четвертий виходи першого комутатора 10 стовпців з'єднані з першим та другим входами другого компаратора стовпців 7 та відповідними входами другого комутатора стовпців 11, другий вхід якого з'єднаний з виходом другого компаратора стовпців 7. Вихід другого комутатора стовпців 11 з'єднаний з другим входом пристрою визначення частки стовпців 13. Керуючий вхід другого комутатора стовпців 13 з'єднаний з додатковим виходом шифратора стовпців 5. Для простоти вважаємо, що фоточутливі елементи матриці являють собою включені в режимі фотоструму фотодіоди, інформаційні виходи матриці з'єднані із входами перетворювачів "струм - напруга", що мають нульовий вхідний опір, тобто що Rвx=0, а світлова пляма, положення якої необхідно визначити на поверхні матриці, являє собою квадрат розміром 2х2 елементи матриці з рівномірним розподілом освітленості в ньому, струмова чутливість фотодіодних елементів матриці однакова, а величина темнового струму дорівнює нулю. Тоді величина фотоструму, що протікає через фотодіодний елемент і-го рядка j-го стовпця матриці, буде дорівнювати: (9) Ii, j = S × E × a i, j де: S - струмова чутливість фотодіодних елементів матриці; Е - освітленість у світловій плямі; ai,j - засвічена світловою плямою площа фотодіодного елемента i-го рядка j-го стовпця матриці. У загальному випадку, при довільному положенні світлової плями розміром 2х2 елемента матриці на матриці будуть засвічені 9 елементів матриці. При цьому матриця засвічених світловою плямою площі фотодіодних елементів матриці має вигляд: æ0 ç ç0 ç. ç ç0 ç A = a 2x ç 0 ç0 ç ç0 ç. ç ç0 è 0 ... 0 . 0 0 0 0 0 ... 0 0 . . . ... p×g g ... p 1 ... p × (1 - g) 1 - g 0 ... . . 0 ... 0 . 0 0 . 0 0 0 . p(1 - g) 1- p (1 - g) × (1 - g) 0 . 0 0 ... 0 ö ÷ ... 0 ÷ . .÷ ÷ ... 0 ÷ ÷ ... 0 ÷, ... 0 ÷ ÷ 0 ... 0 ÷ . . .÷ ÷ 0 ... 0 ÷ ø 0 . 0 0 0 де а2 - площа елемента матриці; (10) р - частка плойці елемента матриці (і+1)-го рядка j-го стовпця, засвіченої світловою плямою, 0
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of optical emmision source angular data
Автори англійськоюVoronko Andrii Oleksandrovych, Potapova Halyna Kostiantynivna, Potapova Galyna Kostiantynivna
Назва патенту російськоюСпособ определения угловых координат источника оптического излучения
Автори російськоюВоронько Андрей Александрович, Потапова Галина Константиновна
МПК / Мітки
МПК: H01L 31/05, H01L 31/042
Мітки: спосіб, джерела, координат, випромінювання, оптичного, визначення, кутових
Код посилання
<a href="https://ua.patents.su/4-22866-sposib-viznachennya-kutovikh-koordinat-dzherela-optichnogo-viprominyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кутових координат джерела оптичного випромінювання</a>
Спосіб визначення кутових координат джерела оптичного випромінювання та позиційно-чутлива матриця фоточутливих елементів
Номер патенту: 51047
Опубліковано: 15.11.2002
Автори: Москаленко Михайло Андрійович, Потапова Галина Костянтинівна
МПК: H01L 31/042, H01L 31/05
Мітки: випромінювання, координат, джерела, фоточутлівих, позиційно-чутлива, спосіб, матриця, оптичного, визначення, елементів, кутових
Формула / Реферат:
1. Спосіб визначення кутових координат джерела оптичного випромінювання, який полягає у тому, що за допомогою оптичної системи випромінювання джерела фокусують на позиційно-чутливу матрицю у світлову пляму, перетворюють оптичні сигнали на елементах матриці в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів з елементів матриці, порівнюють ці сигнали з порогом виявлення, за результатами порівняння приймають...
Пристрій для визначення координат джерела випромінювання
Номер патенту: 6730
Опубліковано: 16.05.2005
Автор: Литвин Ігор Сергійович
МПК: H01L 31/08
Мітки: координат, джерела, пристрій, визначення, випромінювання
Формула / Реферат:
Пристрій визначення координат джерела випромінювання, що містить напівпровідникову структуру, виконану із шарів із різним типом провідності, оснащених електродами, попарно нанесеними на кожен шар, підключені до кожного електрода блоки реєстрації та обробки сигналів і джерело напруги, який відрізняється тим, що напівпровідникові шари структури розділені діелектричним шаром, товщина напівпровідникового шару, що опромінюється першим, вибрана із...
Спосіб визначення координат джерела випромінювання
Номер патенту: 4188
Опубліковано: 17.01.2005
Автор: Литвин Ігор Сергійович
МПК: H01L 31/08
Мітки: спосіб, джерела, випромінювання, визначення, координат
Формула / Реферат:
Спосіб визначення координат джерела випромінювання шляхом реєстрації поздовжніх фотострумів, що виникають в напівпровідниковій структурі при локальному опроміненні, перетворення величин фотострумів в координати, який відрізняється тим, що до напівпровідникової структури прикладають електричне поле, яке викликає збагачення основними носіями зарядів поверхонь напівпровідникових шарів, повернутих один до одного, з напруженістю, вибраною із...
Пеленгатор для визначення кутових координат джерела імпульсного несинусоїдального сигналу
Номер патенту: 15412
Опубліковано: 30.06.1997
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Хом'яков Олег Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: координат, несинусоїдального, джерела, пеленгатор, визначення, сигналу, імпульсного, кутових
Формула / Реферат:
Пеленгатор для определения угловых координат источника импульсного несинусоидального сигнала, содержащий приемную антенну с механизмом вращения антенны по азимуту, последовательно соединенную с приемником, отличающийся тем, что приемная антенна выполнена в виде металлического уголкового рефлектора, в нижней плоскости которого установлен экран из поглощающего материала, и вертикально расположенного проволочного вибратора, выход которого...
Спосіб визначення координат наземного джерела радіовипромінювання
Номер патенту: 43565
Опубліковано: 17.12.2001
Автори: Деденок Віктор Петрович, Худов Генадій Володимирович, Голкін Дмитро Васильович, Бутенко Ольга Станіславівна, Березіна Світлана Іванівна
МПК: G01S 5/06
Мітки: спосіб, джерела, визначення, радіовипромінювання, наземного, координат
Формула / Реферат:
Спосіб, визначення координат наземного джерела радіовипромінювання, який полягає в тому, що приймачі випромінювання встановлюють в двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від джерела випромінювання до приймачів і запам'ятовують час виміру, виміряне значення різниці дальностей використовують для індикації першого різницево-дальномірного пеленга, який відрізняється тим, що радіоприймачі випромінювання...
Попередній патент: Спосіб отримання надтонкого шару оксиду для транзисторів з ефектом пам’яті
Наступний патент: Пристрій для охолодження та термостабілізації напівпровідникового приладу
Випадковий патент: Самомастильний підшипник