Евольвентна зубчаста передача
Формула / Реферат
Евольвентна зубчаста передача, яка складається з конічної шестірні та циліндричного колеса з розташованими на них зубами, що утворюють між собою при зачепленні точковий контакт, яка відрізняється тим, що зубчасте колесо виконане конічним, причому кут початкового (ділильного) конуса шестірні θ1≤0,01 рад, а кут початкового (ділильного) конуса колеса θ2≤θ1, при цьому стандартна висота зубів шестірні і колеса h=2,25m спадає від одного торця зубчастої передачі до іншого торця за лінійним законом, досягаючи мінімальних значень, що дорівнюють hш min = h-bwθ1/2 для шестірні, та hк min = h-bwθ2/2 для колеса, де bw - ширина зубчастих коліс; m - модуль зачеплення, крім того, точки перетину твірних бічних поверхонь конусів шестірні та колеса з осями їх обертання розташовані ліворуч або праворуч відносно торців зубчастої передачі залежно від напрямку кутів θ1 та θ2.
Текст
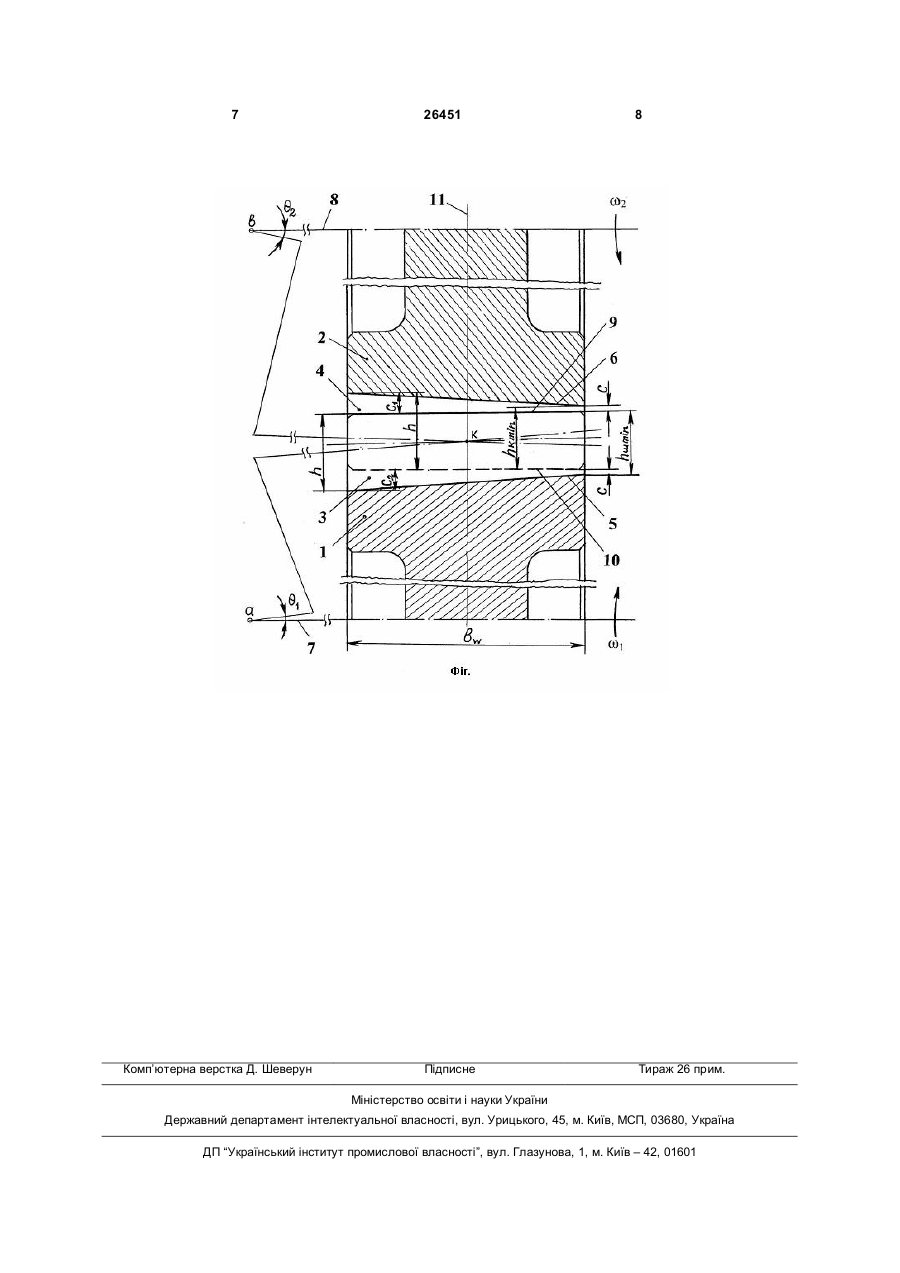
Евольвентна зубчаста передача, яка складається з конічної шестірні та циліндричного колеса з розташованими на них зубами, що утворюють між собою при зачепленні точковий контакт, яка відрізняється тим, що зубчасте колесо виконане конічним, причому кут початкового (ділильного) конуса 3 конуса шестірні q1 £ 0,01рад , а кут початкового (ділильного) конуса колеса q2 £ q1 при цьому стандартна висота зубів шестірні і колеса h=2.25m спадає від одного торця зубчатої передачі до іншого торця за лінійним законом, досягаючи мінімальних значень, що дорівнюють для шестірні, та hш min h - b w q1 / 2 = hк min = h - b w q2 / 2 для колеса, крім того, точки перетину твірних бічних поверхонь конусів шестірні та колеса з осями їх обертання розташовані ліворуч або праворуч відносно торців зубчастої передачі в залежності від напрямку кутів q1 та q 2 , де bw - ширина зубчастих коліс; m - модуль зачеплення. Порівняння технічного рішення, що заявляється, не тільки з прототипом, але й з іншими технічними рішеннями, не виявило в них ознак, які б відрізняли технічне рішення, що заявляється, від прототипу, що дозволяє зробити висновок щодо відповідності критерію «винахідницький рівень». На фіг. Зображена евольвентна зубчаста передача з конічними шестірнею та зубчастим колесом. Згідно до вказаної фігури маємо наступні позначення: w 1, w 2 - кутові швидкості шестірні і колеса; q1, q2 - кути початкових (ділильних) конусів шестірні і колеса; bw - ширина зубчастих коліс (зубчастої передачі); c - стандартна величина радіального зазору; с1, с2 - максимальні величини радіальних зазорів; h - стандартна висота зубів; hш min, hк min мінімальні висоти відповідно шестірні та колеса; а, b - точки перетину твірних бічних поверхонь зубів шестірні та колеса, проведених через точку К, з осями відповідних зубчастих коліс. Зубчаста передача складається із конічної шестірні 1 та колеса 2 з розташованими на них евольвентними зубами відповідно 3 і 4. При цьому твірні 5 і 6 вказаних зубів складають з осями обертання 7 та 8 шестірні та колеса, які паралельні вершинам 9 та 10 зубів 3 та 4, кути нахилу, рівні q1 та q 2 початкових (ділильних) конусів вказаних коліс. Вісь 11 є віссю симетрії зубчастої передачі відносно її торців. Конструктивно висоти зубів шестірні та колеса в межах ширини передачі змінюються за лінійним законом від деяких мінімальних значень hш min та hк min до стандартної величини зубів h, що є характерною для евольвентного зубчастого зачеплення. У відповідності до зміни висоти зубів шестірні та колеса змінюються також за лінійним законом і радіальні зазори між зубами в напрямку їхньої довжини від стандартної величини с=0,25m (правий торець передачі) до деяких максимальних величин с 1, с2 (лівий торець передачі), що визначаються під час виготовлення зубчастих коліс. Вказане розташування зубів можна розглядати як їх поворот відносно один одного на кути q1 та q 2 , при якому початковий лінійний контакт перероджується в точковий контакт зубів. В зв'язку 26451 4 з цим запропоновану зубчасту передачу слід розглядати як передачу з точковою системою зачеплення евольвентних зубів. Зубчаста передача працює наступним чином. Під час роботи двигуна , приєднаного через вал до шестірні 1, остання набуває кутової швидкості w 1. При цьому зуб 3, що належить шестірні, впливає на зуб 4, що належить колесу 2, внаслідок чого вказане колесо починає обертатись з кутовою швидкістю w 2, сприймаючи при цьому корисне навантаження. В процесі роботи евольвентної зубчастої передачі зуби 3 та 4, що належать відповідно шестірні та колесу, здатні компенсувати кути перекосу осей валів y 1 та y 2, які можуть мати напрямки, що співпадають з напрямками кутів q1 та q2, або бути протилежно напрямленими. Найгіршим є випадок, коли кути y 1 та y 2 співпадають за напрямком з кутами q1 та q2, в зв'язку з чим робота зубчастої передачі повинна бути оціненою з урахуванням сумарних кутів q1S=q1+y 1 та q2S=q2+y 2. Величини кутів y 1 та y 2 визначаються через відомі величини помилок монтажу зубчастих коліс, опор та виготовлення зубів з урахуванням деформацій згину та кручення елементів зубчастої передачі та наявності експлуатаційних чинників. Враховуючи початковий контакт зубів, запропонована зубчаста передача під час роботи надійно компенсує вищезазначені конструктивні, технологічні та експлуатаційні чинники, зберігаючи при цьому необхідну навантажувальну здатність разом із покращеними віброакустичними характеристиками. Для розрахунку запропонованої евольвентної зубчастої передачі з метою оцінки її ефективності скористаємося розв'язками задачі, викладеної у [2]: Декл. патент №16691 на корисну модель. Україна. Евольвентна зубчаста передача з точковим контактом зубів /Попов О.П., Каіров О.С. u200602435; Заявл. 06.03.06; Опубл. 15.08.06. Бюл. №8. На основі вказаного патенту функції контактних деформацій в двох взаємно перпендикулярних площинах ZOX та ZOY матимуть вигляд: W (x ) = W1 (x ) + W 2 (x ) = 2 2 b2 b x2 x2 0 1 - x + b0 1= 0 12 2r1 2r пр b0 2r 2 b2 b2 0 0 W (y ) = W 1 (y ) + W 2 (y ) = b 2 q2 k 1 2r 1 1 y2 b2 k + 2 bk q 2 2 2r 2 1 y2 b2 k = 2 bk 2rw 1 y2 ; (1) ; (2) b2 k де W 1(x),W 2(x),W 1(y),W 2(y) - функції контактних деформацій кожного із спряженої пари зубів шестірні та колеса у вказаних площинах; b0, bkмала та велика піввісі еліптичної площадки контакту; rпр=r1r2/(r1+r2) - приведений радіус кривизни еквівалентних (апроксимуючих) циліндрів зубів у площині ZOY; r1=0,5mz1sina w, r2=0,5mz2sina w радіуси кривизни евольвентних бічних профілів зубів в полюсі зачеплення; m - модуль зачеплення; z1 z2 - числа зубів шестірні та колеса; a w - кут зачеплення. При х=0 та у=0 функції (1) та (2) характеризуються максимальними та рівними одне одному значеннями, у зв'язку з чим, отримаємо залежність: 5 26451 2 b2 0 = bk 2rпр 2r w sH = 0.418 виходячи з якої знайдемо вираз коефіцієнта rпр b a= 0 = (3) bk rw Маючи відому величину коефіцієнта а з рівняння (3) можливо знайти залежність rпр r w = 2 , (4) a Маючи задане значення кута q1 з рівняння r1r 2 rw = 2 r1q1 + r 2 q 2 2 запишемо вираз кута q2, який має вигляд 2 æ 1 q1 ö ÷ (5) q2 = r1ç ç rц r2 ÷ è ø На основі наведених виразів і у відповідності до вищевказаного патенту [2] представимо залежність максимальних контактних напру sтах та трансцендентне рівняння для знаходження коефіцієнта a у кінцевому вигляді: a(a + v ) E2 Fn пр 2 smax = 0.333 2 rпр ; (6) rпрFn 2. 44 = 1 , (7) 3 2 bw a (a + v )Eпр де Епр=2Е1Е2/(Е1+Е2) - приведений модуль пружності; Е1, Е2 - модулі пружності матеріалів шестірні та колеса; v- коефіцієнт Пуассона; Fn нормальна сила, що діє на спряжену пару зубів. Виконаємо розрахунки запропонованої зубчастої передачі, виходячи з z1=36; z2=110; m=6мм; a w=20°; bw=215мм; Fn=3,93*104Н; v=0,3; Епр=2,1*105МПа при Е1=Е2. За вищенаведеними формулами знаходимо r1=36,936мм; r2=112,86мм; rпр=27,828мм. Потім, задавшись значеннями a=(l; 2; 4; 6; 8; 10)*10-3, за формулою (7) знайдемо значення функції j(a ) = 6 rпрFn 2. 44 , 3 2 bw a (a + v )Eпр відповідні вказаним величинам коефіцієнта a та рівні j(a)=2,935; 1,847; 1,161; 0,844; 0,729; 0,626. Шляхом графічного розв'язку рівняння (7) за відомих величин j(a) та a визначимо коефіцієнт a=5,17*10 -3, виходячи з якого за формулою (6) розрахуємо в полюсі зачеплення smах=338МПа. Максимальні контактні напруження в полюсі зачеплення для традиційної евольвентної зубчастої передачі з початковим лінійним контактом зубів у відповідності до формули Герца EпрFn b wrпр дорівнюватимуть sн=491МПа. Таким чином, в запропонованій зубчастій передачі максимальні контактні напруги у порівнянні з традиційною евольвентою передачею зменшилися в jк=sн/smax=491/338=1.451 разів, що є еквівалентним підвищенню навантажувальної здатності за цими напруженнями в jн=jк3=1,4513=3,057 разів. Ці розрахунки підтверджують високу ефективність запропонованої зубчастої передачі. За відомих величин кута q1=(5,17; 5,5; 6; 7; 8)* 10-3рад за формулою (5) визначимо відповідні цим кутам величини кутів q2=(5,17; 5,05; 4,87; 4,41; 3,81)*10-3 рад. Отже, кути q1 та q2 суворо взаємопов'язані один з одним. Наведені вище розрахунки проведені без урахування розцентровок осей валів зубчастих коліс, що враховують конструктивні, технологічні та експлуатаційні чинники. У зв'язку з цим виконаємо розрахунки запропонованої зубчастої передачі при q1=q2=5,17*10-3рад з урахуванням y 1=y 2=4*10-3рад, виходячи з умови, що кути q1 та y 1 а також q2 та y 2 співпадають за напрямком (найгірший випадок), у зв'язку з чим отримаємо q1S=q1+y 1 та q2S=q2+y 2. При значеннях q1S та q2S за формулою (4) визначимо rw=3,31*105мм, а за формулою (6) smax=413МПа. У відповідності до цього знаходимо jк=491/413=1,19 та jн=jк3=1,193=1,678. Таким чином, навантажувальна здатність запропонованої зубчастої передачі за наявністю перекосу осей виявилася вище навантажувальної здатності традиційної зубчастої передачі з початковим лінійним контактом евольвентних зубів, що працює без перекосу осей, в 1,678 разів, але нижче запропонованої передачі за відсутністю перекосу осей в 3,057/1,678=1,82 разів. Як відомо, традиційні евольвентні зубчасті передачі з початковим лінійним контактом зубів не працездатні при кутах перекосу осей ³10-3рад. В розглянутому випадку кут перекосу осей збільшений в 4*10-3/10 -3=4 рази. При цьому запропонована евольвентна зубчаста передача не тільки працездатна , але ще й характеризується підвищеною навантажувальною здатністю по контактних напруженнях. Екологічний ефект від впровадження пропонованого технічного рішення слід очікувати за рахунок кардинального підвищення навантажувальної здатності, терміну служби та ефективності роботи. Суспільна користь технічного рішення, що заявляється, полягає в значному покращенні віброакустичних характеристик передачі, в тому числі при розцентровках осей, за рахунок зниження вібрації та шуму (промсанітарія) внаслідок наявності точкового контакту зубів та їх повороту відносно один одного на визначені кути. 7 Комп’ютерна верстка Д. Шеверун 26451 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInvolute gearing
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюЭвольвентная зубчатая передача
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16H 1/00
Мітки: передача, евольвентна, зубчаста
Код посилання
<a href="https://ua.patents.su/4-26451-evolventna-zubchasta-peredacha.html" target="_blank" rel="follow" title="База патентів України">Евольвентна зубчаста передача</a>
Евольвентна зубчаста передача
Номер патенту: 25078
Опубліковано: 25.07.2007
Автор: Попов Олексій Павлович
МПК: F16H 1/10
Мітки: передача, зубчаста, евольвентна
Формула / Реферат:
Евольвентна зубчаста передача, яка складається із конічної шестірні і циліндричного колеса з розташованими на них зубами однакової висоти з точковою системою зачеплення, яка відрізняється тим, що висота зубів конічної шестірні і циліндричного колеса виконана змінною, яка змінюється по лінійному закону, при цьому максимальна і мінімальна
Зубчаста передача
Номер патенту: 22384
Опубліковано: 25.04.2007
Автори: Піпа Борис Федорович, Марченко Анатолій Іванович, Хомяк Олег Миколайович
МПК: F16H 1/24
Формула / Реферат:
Зубчаста передача, що містить шестірню та зубчасте колесо, яка відрізняється тим, що додатково обладнана циліндричними роликами, вільно встановленими між зубами шестірні та виступними над їх головками, причому циліндричні ролики з'єднують шестірню та зубчасте колесо між собою.
Евольвентна зубчаста передача попова о.п. з точковою системою зачеплення поздовжньо модифікованих зубів
Номер патенту: 11952
Опубліковано: 16.01.2006
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, системою, зачеплення, попова, зубчаста, точковою, передача, модифікованих, евольвентна, зубів, поздовжньої
Формула / Реферат:
Евольвентна зубчаста передача з точковою системою зачеплення поздовжньо модифікованих зубів, що містить ведуче та ведене зубчасті колеса з розташованими на них евольвентними зубами, які взаємодіють один з одним по лінії контакту, яка відрізняється тим, що прямолінійні твірні бічних поверхонь зубів ведучого зубчастого колеса замінені криволінійними твірними з радіусом кривизни
Евольвентна зубчаста передача з точковим контактом зубів
Номер патенту: 16691
Опубліковано: 15.08.2006
Автори: Попов Олексій Павлович, Каіров Олексій Сергійович
МПК: F16H 1/00
Мітки: зубів, евольвентна, передача, зубчаста, точковим, контактом
Формула / Реферат:
Зубчаста передача, що складається із ведучого зубчастого колеса з криволінійними твірними бічних поверхонь зубів і веденого зубчастого колеса з прямолінійними твірними бічних поверхонь зубів, які утворюють між собою точковий контакт, яка відрізняється тим, що ведуче зубчасте колесо виконано у вигляді зрізаного конуса з кутом ділильного конуса , на твірній поверхні якого...
Конічна зубчаста передача
Номер патенту: 25462
Опубліковано: 10.08.2007
Автори: Тарасенко Анатолій Іванович, Чабан Віталій Васильович, Піпа Борис Федорович, Марченко Анатолій Іванович
МПК: F16H 1/00
Мітки: передача, конічна, зубчаста
Формула / Реферат:
1. Конічна зубчаста передача, що містить конічну шестірню та конічне зубчасте колесо, встановлені відповідно на ведучому та веденому валах, яка відрізняється тим, що додатково обладнана пружиною стиску, встановленою на веденому валу зі сторони більшого діаметра конічного зубчастого колеса, та засобом регулювання зусилля пружини стиску.2. Конічна зубчаста передача за п. 1, яка відрізняється тим, що засіб регулювання зусилля пружини...
Попередній патент: Конусна дробарка
Наступний патент: Косозуба зубчаста передача
Випадковий патент: Лікарський засіб кардіопротекторної дії