Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми
Номер патенту: 27311
Опубліковано: 25.10.2007
Автори: Пуляєв Валерій Олександрович, Лисенко Валерій Миколайович

Формула / Реферат
Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми, в процесі якого для випадку некогерентного розсіяння використовують вираз:
![]()
де ![]() h - висота,
h - висота,
PS(h), Te(h) і Ti(h) - висотні залежності потужності сигналу розсіяння, електронної та іонної температур плазми,
С - константа радіолокатора, яка спочатку розраховується в один із сеансів в еталонну добу за виразом:

де PS(hF2)ET, Te(hF2)ET і Ti(hF2)ET - одержані радіолокатором з висоти максимуму (hF2)ET іоносферного шару F2 потужність сигналу розсіяння, а також електронна та іонна температури,
(fhF2)ET - значення критичної частоти для цієї висоти з іоносферної станції (іонозонда),
а потім константа уточнюється в поточний день згідно з виразом:
С = СЕТ/k,
де k - ітераційний множник, що враховує зміну коефіцієнта підсилення приймача радіолокатора по відношенню до його стану в еталонний день та знаходиться при фіксації мінімуму суми середньоквадратичних відхилень в процедурі, що має вигляд:

де ![]() ET - залежність потужності фонового шуму протягом інтервалу Т на виході приймача в еталонний день, що одержана в кожному сеансі в кінці радіолокаційної розгортки дальності, де сигнал некогерентного розсіяння вже не реєструється,
ET - залежність потужності фонового шуму протягом інтервалу Т на виході приймача в еталонний день, що одержана в кожному сеансі в кінці радіолокаційної розгортки дальності, де сигнал некогерентного розсіяння вже не реєструється,
![]() - ця ж потужність в поточний день, віднесена до моменту часу еталонної доби, d - ітераційна добавка до постійної складової потужності шуму,
- ця ж потужність в поточний день, віднесена до моменту часу еталонної доби, d - ітераційна добавка до постійної складової потужності шуму,
який відрізняється тим, що поточне значення константи С замінюється на СПОТ з урахуванням зміни в ![]() разів енергетики радіолокатора, а саме:
разів енергетики радіолокатора, а саме:
СПОТ = С.![]() ,
,
при цьому ![]() розраховується за виразом:
розраховується за виразом:
 ,
,
де (![]() - добавка фонового шуму, яка знаходиться як різниця між постійними складовими потужності фонового шуму при ввімкненому та вимкненому радіопередавачеві, причому в той момент еталонної доби, коли має місце мінімум змінної складової потужності шуму (мінімум сигналу від зоряних скупчень).
- добавка фонового шуму, яка знаходиться як різниця між постійними складовими потужності фонового шуму при ввімкненому та вимкненому радіопередавачеві, причому в той момент еталонної доби, коли має місце мінімум змінної складової потужності шуму (мінімум сигналу від зоряних скупчень).
Текст
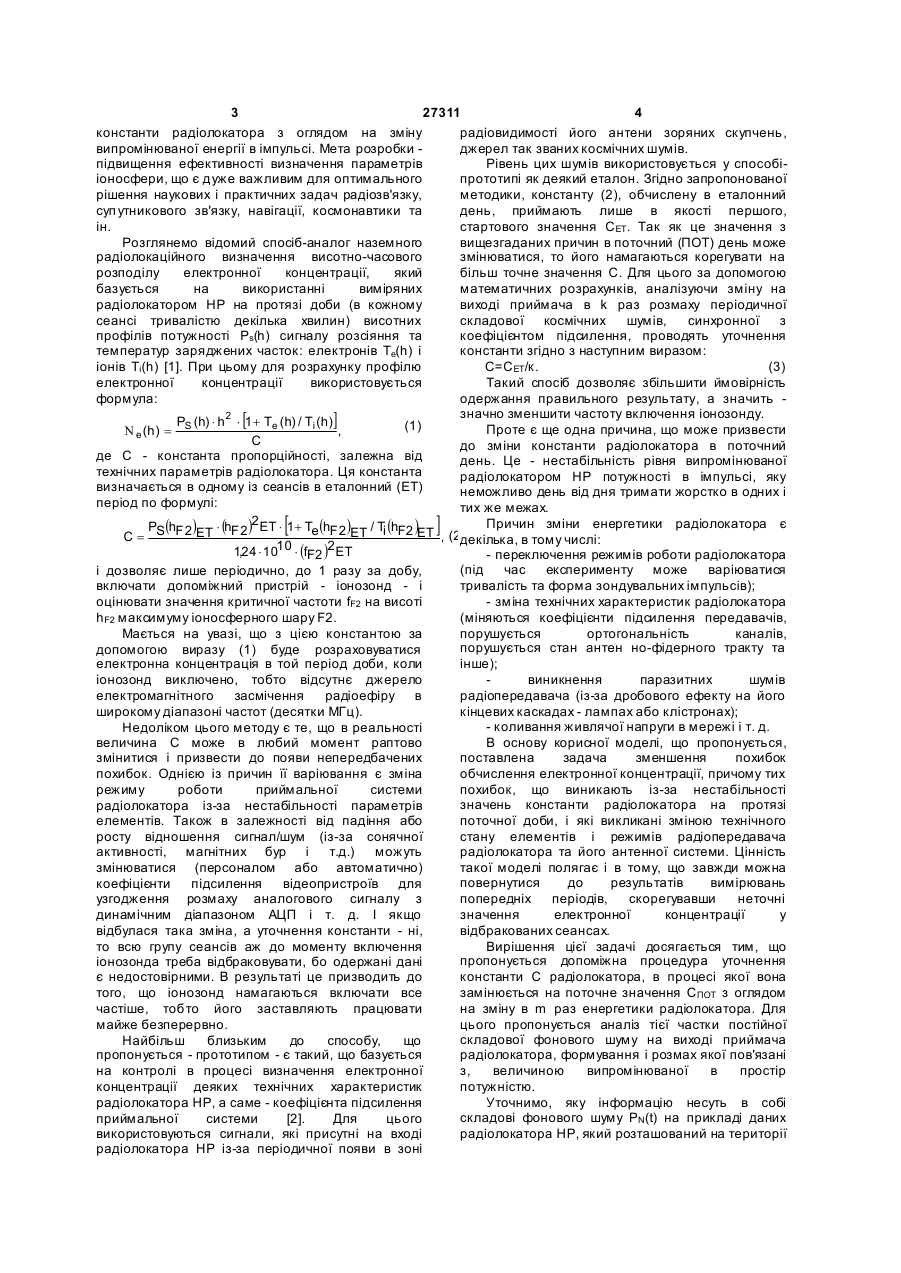
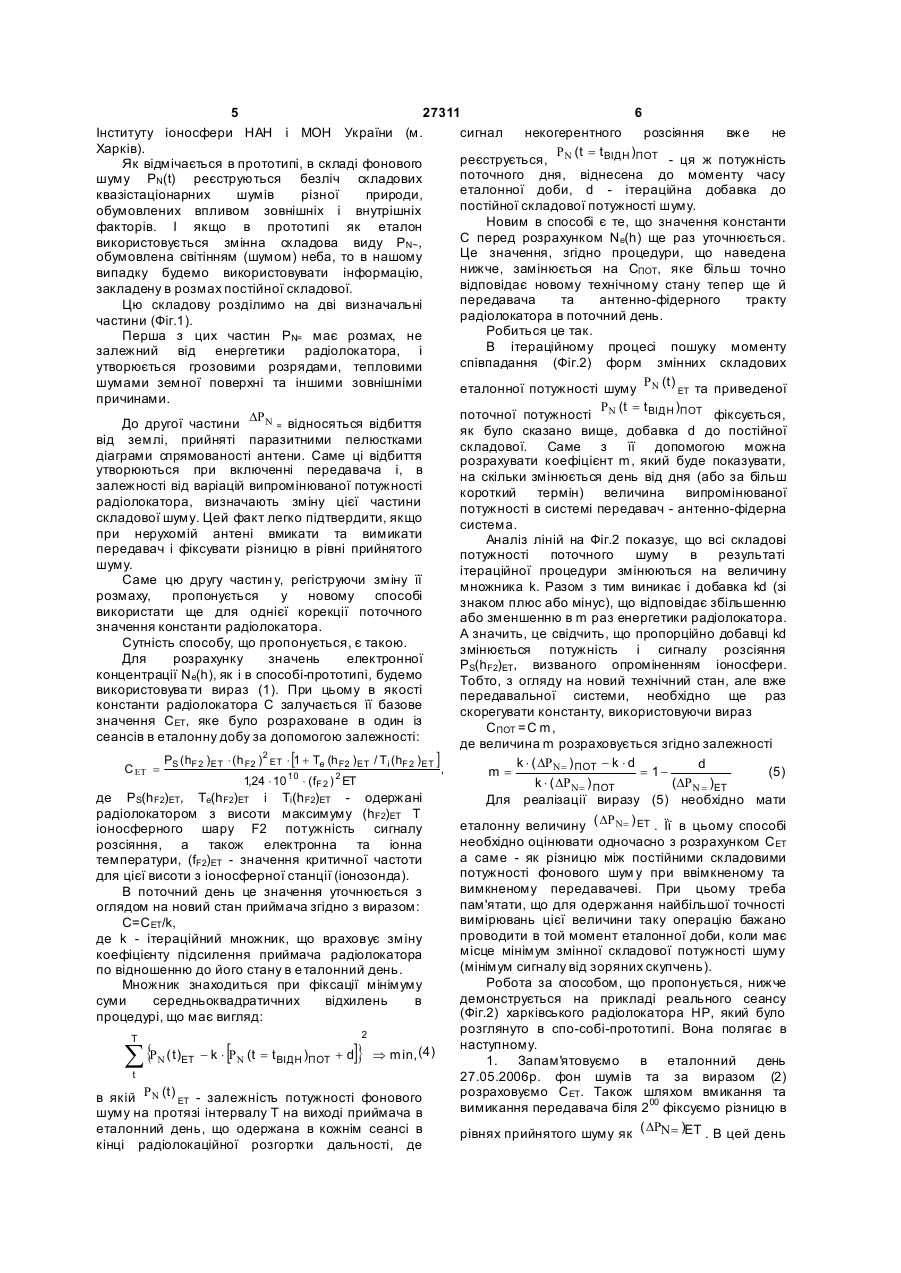
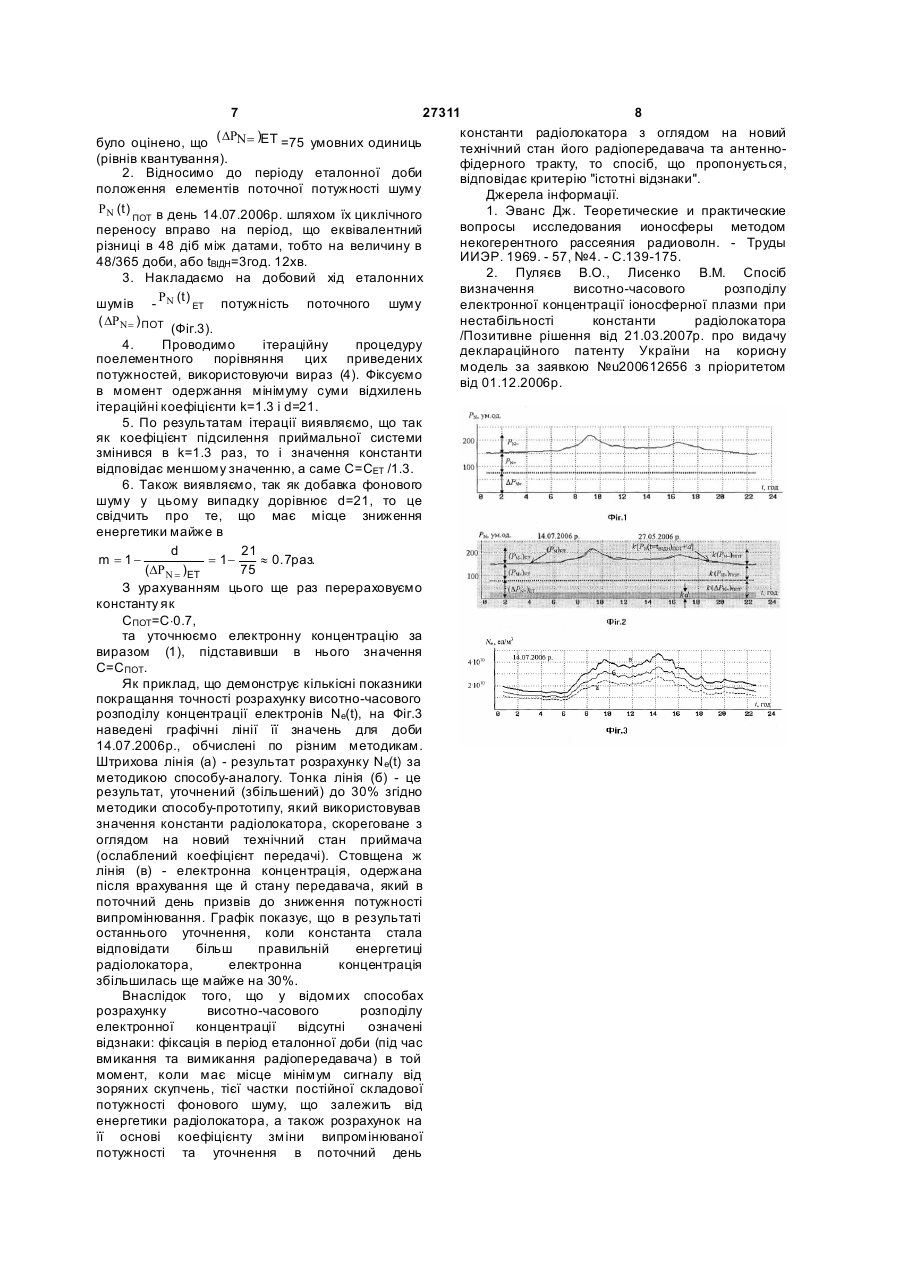
Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми, в процесі якого для випадку некогерентного розсіяння використовують вираз: N e (h ) = КОНЦ ЕНТРАЦІЇ (11) (54) СПОСІБ ВИЗНАЧЕННЯ ІОНОСФ ЕРНОЇ ПЛАЗМИ ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ UA ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ в идається під в ідпов ідальність в ласника патенту Корисна модель належить до радіолокації, зокрема до радіотехнічних вимірювань параметрів іоносфери методом некогерентного розсіяння (HP). Ця модель може бути застосована для зменшення похибок обчислення висотно-часового розподілу концентрації електронів, використовуючи як в процесі, так і по результатам радіофізичного експерименту операцію уточнення 3 27311 4 константи радіолокатора з оглядом на зміну радіовидимості його антени зоряних скупчень, випромінюваної енергії в імпульсі. Мета розробки джерел так званих космічних шумів. підвищення ефективності визначення параметрів Рівень цих шумів використовується у способііоносфери, що є дуже важливим для оптимального прототипі як деякий еталон. Згідно запропонованої рішення наукових і практичних задач радіозв'язку, методики, константу (2), обчислену в еталонний суп утникового зв'язку, навігації, космонавтики та день, приймають лише в якості першого, ін. стартового значення С ET. Так як це значення з Розглянемо відомий спосіб-аналог наземного вищезгаданих причин в поточний (ПОТ) день може радіолокаційного визначення висотно-часового змінюватися, то його намагаються корегувати на розподілу електронної концентрації, який більш точне значення С. Для цього за допомогою базується на використанні виміряних математичних розрахунків, аналізуючи зміну на радіолокатором HP на протязі доби (в кожному виході приймача в k раз розмаху періодичної сеансі тривалістю декілька хвилин) висотних складової космічних шумів, синхронної з профілів потужності Ps(h) сигналу розсіяння та коефіцієнтом підсилення, проводять уточнення температур заряджених часток: електронів Те(h) і константи згідно з наступним виразом: іонів Ті(h) [1]. При цьому для розрахунку профілю С=СET/к. (3) електронної концентрації використовується Такий спосіб дозволяє збільшити ймовірність формула: одержання правильного результату, а значить значно зменшити частоту включення іонозонду. 2 PS (h) × h × [1 + Te (h) / Ti (h )] (1) Проте є ще одна причина, що може призвести N e (h ) = , C до зміни константи радіолокатора в поточний де С - константа пропорційності, залежна від день. Це - нестабільність рівня випромінюваної технічних параметрів радіолокатора. Ця константа радіолокатором HP потужності в імпульсі, яку визначається в одному із сеансів в еталонний (ЕТ) неможливо день від дня тримати жорстко в одних і період по формулі: тих же межах. Причин зміни енергетики радіолокатора є PS(hF 2 )ET × (hF 2 )2 ET × 1 + Te (hF 2 )ET / Ti (hF2 )ET C= , (2) декілька, в тому числі: 1,24 × 1010 × (fF2 )2 ET - переключення режимів роботи радіолокатора (під час експерименту може варіюватися і дозволяє лише періодично, до 1 разу за добу, включати допоміжний пристрій - іонозонд - і тривалість та форма зондувальних імпульсів); оцінювати значення критичної частоти fF2 на висоті - зміна технічних характеристик радіолокатора hF2 максимуму іоносферного шару F2. (міняються коефіцієнти підсилення передавачів, Мається на увазі, що з цією константою за порушується ортогональність каналів, порушується стан антен но-фідерного тракту та допомогою виразу (1) буде розраховуватися електронна концентрація в той період доби, коли інше); іонозонд виключено, тобто відсутнє джерело виникнення паразитних шумів електромагнітного засмічення радіоефіру в радіопередавача (із-за дробового ефекту на його широкому діапазоні частот (десятки МГц). кінцевих каскадах - лампах або клістронах); - коливання живлячої напруги в мережі і т. д. Недоліком цього методу є те, що в реальності величина С може в любий момент раптово В основу корисної моделі, що пропонується, змінитися і призвести до появи непередбачених поставлена задача зменшення похибок похибок. Однією із причин її варіювання є зміна обчислення електронної концентрації, причому тих режиму роботи приймальної системи похибок, що виникають із-за нестабільності значень константи радіолокатора на протязі радіолокатора із-за нестабільності параметрів елементів. Також в залежності від падіння або поточної доби, і які викликані зміною технічного росту відношення сигнал/шум (із-за сонячної стану елементів і режимів радіопередавача активності, магнітних бур і т.д.) можуть радіолокатора та його антенної системи. Цінність змінюватися (персоналом або автоматично) такої моделі полягає і в тому, що завжди можна повернутися до результатів вимірювань коефіцієнти підсилення відеопристроїв для узгодження розмаху аналогового сигналу з попередніх періодів, скорегувавши неточні динамічним діапазоном АЦП і т. д. І якщо значення електронної концентрації у відбулася така зміна, а уточнення константи - ні, відбракованих сеансах. то всю групу сеансів аж до моменту включення Вирішення цієї задачі досягається тим, що пропонується допоміжна процедура уточнення іонозонда треба відбраковувати, бо одержані дані є недостовірними. В результаті це призводить до константи С радіолокатора, в процесі якої вона того, що іонозонд намагаються включати все замінюється на поточне значення С ПОТ з оглядом частіше, тобто його заставляють працювати на зміну в m раз енергетики радіолокатора. Для майже безперервно. цього пропонується аналіз тієї частки постійної складової фонового шуму на виході приймача Найбільш близьким до способу, що пропонується - прототипом - є такий, що базується радіолокатора, формування і розмах якої пов'язані на контролі в процесі визначення електронної з, величиною випромінюваної в простір концентрації деяких технічних характеристик потужністю. радіолокатора HP, а саме - коефіцієнта підсилення Уточнимо, яку інформацію несуть в собі складові фонового шуму PN(t) на прикладі даних приймальної системи [2]. Для цього використовуються сигнали, які присутні на вході радіолокатора HP, який розташований на території радіолокатора HP із-за періодичної появи в зоні [ ] 5 27311 6 Інституту іоносфери НАН і МОН України (м. сигнал некогерентного розсіяння вже не Харків). R N (= t ВІДН )ПОТ t реєструється, - ця ж потужність Як відмічається в прототипі, в складі фонового поточного дня, віднесена до моменту часу шуму РN(t) реєструються безліч складових еталонної доби, d - ітераційна добавка до квазістаціонарних шумів різної природи, постійної складової потужності шуму. обумовлених впливом зовнішніх і внутрішніх Новим в способі є те, що значення константи факторів. І якщо в прототипі як еталон С перед розрахунком Ne(h) ще раз уточнюється. використовується змінна складова виду РN~, Це значення, згідно процедури, що наведена обумовлена світінням (шумом) неба, то в нашому нижче, замінюється на СПОТ, яке більш точно випадку будемо використовувати інформацію, відповідає новому технічному стану тепер ще й закладену в розмах постійної складової. передавача та антенно-фідерного тракту Цю складову розділимо на дві визначальні радіолокатора в поточний день. частини (Фіг.1). Робиться це так. Перша з цих частин PN= має розмах, не В ітераційному процесі пошуку моменту залежний від енергетики радіолокатора, і співпадання (Фіг.2) форм змінних складових утворюється грозовими розрядами, тепловими шумами земної поверхні та іншими зовнішніми еталонної потужності шуму RN (t ) ET та приведеної причинами. R (t = t ВІДН )ПОТ поточної потужності N фіксується, До другої частини DRN = відносяться відбиття як було сказано вище, добавка d до постійної від землі, прийняті паразитними пелюстками складової. Саме з її допомогою можна діаграми спрямованості антени. Саме ці відбиття розрахувати коефіцієнт m, який буде показувати, утворюються при включенні передавача і, в на скільки змінюється день від дня (або за більш залежності від варіацій випромінюваної потужності короткий термін) величина випромінюваної радіолокатора, визначають зміну цієї частини потужності в системі передавач - антенно-фідерна складової шуму. Цей факт легко підтвердити, якщо система. при нерухомій антені вмикати та вимикати Аналіз ліній на Фіг.2 показує, що всі складові передавач і фіксувати різницю в рівні прийнятого потужності поточного шуму в результаті шуму. ітераційної процедури змінюються на величину Саме цю другу частин у, регіструючи зміну її множника k. Разом з тим виникає і добавка kd (зі розмаху, пропонується у новому способі знаком плюс або мінус), що відповідає збільшенню використати ще для однієї корекції поточного або зменшенню в m раз енергетики радіолокатора. значення константи радіолокатора. А значить, це свідчить, що пропорційно добавці kd Сутність способу, що пропонується, є такою. змінюється потужність і сигналу розсіяння Для розрахунку значень електронної PS(hF2)ET, визваного опроміненням іоносфери. концентрації Ne(h), як і в способі-прототипі, будемо Тобто, з огляду на новий технічний стан, але вже використовува ти вираз (1). При цьому в якості передавальної системи, необхідно ще раз константи радіолокатора С залучається її базове скорегувати константу, використовуючи вираз значення СET, яке було розраховане в один із СПОТ =С m, сеансів в еталонну добу за допомогою залежності: де величина m розраховується згідно залежності P (h ) × (h F2 )2 ET × [1 + Te (h F2 )ET / Ti (hF 2 )ET ] k × ( DR N= ) ПОТ - k × d d C ET = S F 2 ET , m= = 1(5) 1 24 × 10 10 × (fF 2 ) 2 ET , k × ( DR N= ) ПОТ (DR N = )ET де PS(hF2)ET, Te(hF2)ET і Ti(hF2)ET - одержані Для реалізації виразу (5) необхідно мати радіолокатором з висоти максимуму (hF2)ET T еталонну величину ( DRN= ) ET . Її в цьому способі іоносферного шару F2 потужність сигналу необхідно оцінювати одночасно з розрахунком С ET розсіяння, а також електронна та іонна а саме - як різницю між постійними складовими температури, (fF2)ET - значення критичної частоти потужності фонового шум у при ввімкненому та для цієї висоти з іоносферної станції (іонозонда). вимкненому передавачеві. При цьому треба В поточний день це значення уточнюється з пам'ятати, що для одержання найбільшої точності оглядом на новий стан приймача згідно з виразом: вимірювань цієї величини таку операцію бажано С=СET/k, проводити в той момент еталонної доби, коли має де k - ітераційний множник, що враховує зміну місце мінімум змінної складової потужності шуму коефіцієнту підсилення приймача радіолокатора (мінімум сигналу від зоряних скупчень). по відношенню до його стану в е талонний день. Робота за способом, що пропонується, нижче Множник знаходиться при фіксації мінімуму демонструється на прикладі реального сеансу суми середньоквадратичних відхилень в (Фіг.2) харківського радіолокатора HP, який було процедурі, що має вигляд: розглянуто в спо-собі-прототипі. Вона полягає в 2 T наступному. (4) R N ( t )ET - k × R N (t = t ВІДН )ПОТ + d Þ min, 1. Запам'ятовуємо в еталонний день t 27.05.2006р. фон шумів та за виразом (2) розраховуємо СET. Також шляхом вмикання та в якій RN (t ) ET - залежність потужності фонового вимикання передавача біля 200 фіксуємо різницю в шуму на протязі інтервалу Т на виході приймача в еталонний день, що одержана в кожнім сеансі в рівнях прийнятого шуму як ( DRN= )ET . В цей день кінці радіолокаційної розгортки дальності, де å{ [ ]} 7 27311 8 константи радіолокатора з оглядом на новий було оцінено, що ( DRN= )ET =75 умовних одиниць технічний стан його радіопередавача та антенно(рівнів квантування). фідерного тракту, то спосіб, що пропонується, 2. Відносимо до періоду еталонної доби відповідає критерію "істотні відзнаки". положення елементів поточної потужності шуму Джерела інформації. R N (t ) 1. Эванс Дж. Теоретические и практические ПОТ в день 14.07.2006р. шляхом їх циклічного вопросы исследования ионосферы методом переносу вправо на період, що еквівалентний некогерентного рассеяния радиоволн. - Труды різниці в 48 діб між датами, тобто на величину в ИИЭР. 1969. - 57, №4. - С.139-175. 48/365 доби, або tВІДН=3год. 12хв. 2. Пуляєв В.О., Лисенко В.М. Спосіб 3. Накладаємо на добовий хід еталонних визначення висотно-часового розподілу шумів - RN (t ) ET потужність поточного шуму електронної концентрації іоносферної плазми при ( DRN ) ПОТ нестабільності константи радіолокатора = (Фіг.3). /Позитивне рішення від 21.03.2007р. про видачу 4. Проводимо ітераційну процедуру деклараційного патенту України на корисну поелементного порівняння цих приведених модель за заявкою №u200612656 з пріоритетом потужностей, використовуючи вираз (4). Фіксуємо від 01.12.2006р. в момент одержання мінімуму суми відхилень ітераційні коефіцієнти k=1.3 i d=21. 5. По результатам ітерації виявляємо, що так як коефіцієнт підсилення приймальної системи змінився в k=1.3 раз, то і значення константи відповідає меншому значенню, а саме С=СЕТ /1.3. 6. Також виявляємо, так як добавка фонового шуму у цьому випадку дорівнює d=21, то це свідчить про те, що має місце зниження енергетики майже в d 21 m =1= 1» 0. 7раз. (DRN = )ET 75 З урахуванням цього ще раз перераховуємо константу як СПОТ=С×0.7, та уточнюємо електронну концентрацію за виразом (1), підставивши в нього значення С= СПОТ. Як приклад, що демонструє кількісні показники покращання точності розрахунку висотно-часового розподілу концентрації електронів Ne(t), на Фіг.3 наведені графічні лінії її значень для доби 14.07.2006p., обчислені по різним методикам. Штрихова лінія (а) - результат розрахунку N e(t) за методикою способу-аналогу. Тонка лінія (б) - це результат, уточнений (збільшений) до 30% згідно методики способу-прототипу, який використовував значення константи радіолокатора, скореговане з оглядом на новий технічний стан приймача (ослаблений коефіцієнт передачі). Стовщена ж лінія (в) - електронна концентрація, одержана після врахування ще й стану передавача, який в поточний день призвів до зниження потужності випромінювання. Графік показує, що в результаті останнього уточнення, коли константа стала відповідати більш правильній енергетиці радіолокатора, електронна концентрація збільшилась ще майже на 30%. Внаслідок того, що у відомих способах розрахунку висотно-часового розподілу електронної концентрації відсутні означені відзнаки: фіксація в період еталонної доби (під час вмикання та вимикання радіопередавача) в той момент, коли має місце мінімум сигналу від зоряних скупчень, тієї частки постійної складової потужності фонового шуму, що залежить від енергетики радіолокатора, а також розрахунок на її основі коефіцієнту зміни випромінюваної потужності та уточнення в поточний день
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for distributing electron concentration in ionospheric plasma as a function of height and time
Автори англійськоюPuliaiev Valerii Oleksandrovych, Lysenko Valerii Mykolaiovych
Назва патенту російськоюСпособ распределения концентрации электронов в ионосферной плазме по высоте и времени
Автори російськоюПуляев Валерий Александрович, Лысенко Валерий Николаевич
МПК / Мітки
МПК: G01S 13/95
Мітки: концентрації, спосіб, розподілу, висотно-часового, іоносферної, плазми, визначення, електронної
Код посилання
<a href="https://ua.patents.su/4-27311-sposib-viznachennya-visotno-chasovogo-rozpodilu-elektronno-koncentraci-ionosferno-plazmi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми</a>
Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми при нестабільності константи радіолокатора
Номер патенту: 24531
Опубліковано: 10.07.2007
Автори: Лисенко Валерій Миколайович, Пуляєв Валерій Олександрович
МПК: G01S 13/95
Мітки: висотно-часового, іоносферної, визначення, розподілу, плазми, нестабільності, спосіб, концентрації, електронної, константи, радіолокатора
Формула / Реферат:
Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми при нестабільності константи радіолокатора, коли при некогерентному розсіянні використовується вираз:,де h - висота, Ps(h), Te(h) і Ti(h) - висотні залежності одержаних потужностей сигналу розсіяння, електронної та іонної температур заряджених часток плазми, Ср -...
Спосіб визначення розподілу концентрації гемоглобіну в еритроцитах крові людини
Номер патенту: 31938
Опубліковано: 15.12.2000
Автори: Ушенко Юрій Олександрович, Ушенко Олександр Григорович, Пішак Василь Павлович, Григоришин Петро Михайлович, Єрмоленко Сергій Борисович, Кокощук Георгій Ілліч, Бурковець Дмитро Миколайович, Пішак Ольга Василівна
МПК: A61B 5/05, G01N 33/49
Мітки: розподілу, гемоглобіну, спосіб, крові, еритроцитах, визначення, людини, концентрації
Текст:
...та її статистичного розподілу. Ні в одному із розглянутих нами аналогів запропонованного способу не зустрічається виділення когерентних зображеннь окремих еритроцитів, обертання фазокомпенсуючої пластинки та лінійного аналізатора, вимірювання азимута а* і еліптичністі р* лазерних коливань в когерентному зображені еритроциту, за якими судять про локальну концентрацію гемоглобіну С\ сканування когерентного зображення анасамбля еритроцитів взірця...
Спосіб вимірювання електронної температури плазми і пристрій для здійснення способу
Номер патенту: 76789
Опубліковано: 15.09.2006
Автори: Онищенко Андрій Володимирович, Алімов Святослав Сергійович, Залкінд Віктор Михайлович, Бобков Валентин Васильович, Бобков Володимир Валентинович, Старовойтов Роман Іванович, Азарєнков Микола Олексійович
МПК: H05H 1/00
Мітки: температури, плазми, електронної, пристрій, способу, вимірювання, здійснення, спосіб
Формула / Реферат:
1. Спосіб вимірювання електронної температури плазми, який включає подання на занурений в плазму електричний зонд змінної напруги високої частоти, яка набагато менша від плазмової частоти електронів і яку попередньо модулюють по амплітуді, і детектування вимірювального сигналу, що формується зондовим струмом на ємності, який відрізняється тим, що вимірюють зондовий струм для двох різних значень амплітуди змінної напруги високої частоти,...
Спосіб визначення концентрації електронів у максимумі іонізації іоносфери
Номер патенту: 14102
Опубліковано: 15.05.2006
Автори: Рогожкін Євген Васильович, Пуляєв Валерій Олександрович, Котов Дмитро Володимирович
МПК: G01S 13/00, G01S 13/95
Мітки: електронів, іонізації, спосіб, іоносфери, визначення, концентрації, максимумі
Формула / Реферат:
Спосіб визначення електронної концентрації у максимумі іонізації іоносфери в імпульсних некогерентних РЛС зі спільною приймально-передавальною антеною, що включає періодичне випромінювання пари когерентних радіоімпульсів, перший з яких має заповнення у вигляді звичайної хвилі, а другий - у вигляді незвичайної хвилі, окремий прийом звичайної та незвичайної хвиль некогерентно розсіяного іоносферою сигналу, перенос сигналів звичайної та...
Спосіб визначення параметрів розподілу лікарських засобів у крові, органах і тканинах організму

Номер патенту: 19966
Опубліковано: 15.01.2007
Автори: Жук Ольга Вікторівна, Годован Владлена Володимирівна, Кресюн Валентин Йосипович, Зіньковський Володимир Георгійович, Щукін Сергій Ігоревич
МПК: A61B 10/00
Мітки: органах, організму, розподілу, параметрів, спосіб, тканинах, засобів, визначення, крові, лікарських
Формула / Реферат:
Спосіб визначення параметрів розподілу лікарських засобів у крові, органах і тканинах організму, що включає знаходження величин площ під концентраційними фармакокінетичними кривими в крові та органах (тканинах) і їх відношень, який відрізняється тим, що визначають інтеграл концентрації (площа під концентраційною кривою) в інтервалі від 0 до величини концентрації...
Попередній патент: Спосіб кількісного визначення кверцетину
Наступний патент: Спосіб припинення кровотечі з виразки дванадцятипалої кишки
Випадковий патент: Світлоповертальний елемент для дорожніх катафотів