Мостовий кран
Номер патенту: 30198
Опубліковано: 15.11.2000
Автори: Тетіор Олександр Никанорович, Чернега Віктор Степанович, Бадура Герхард Піц


Формула / Реферат
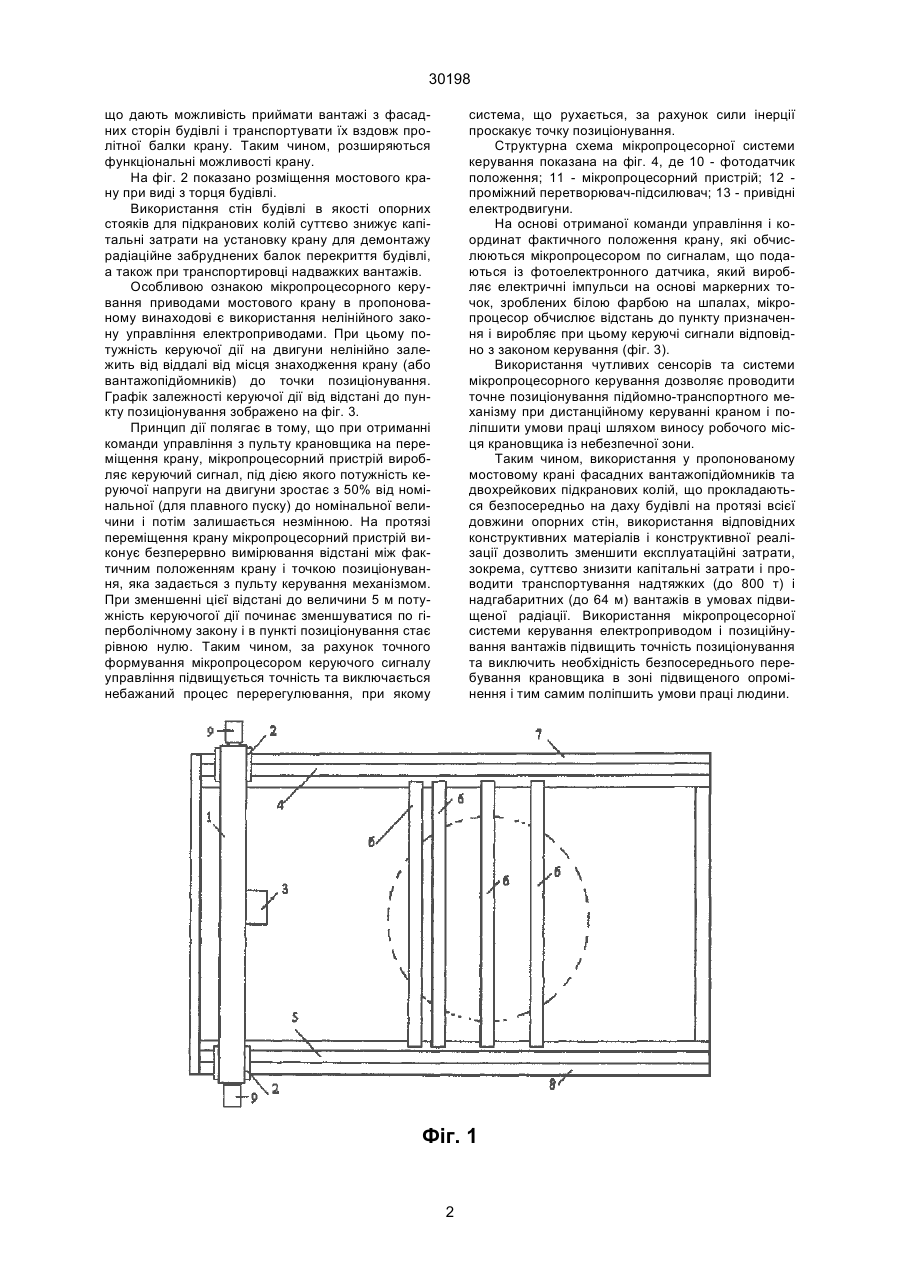
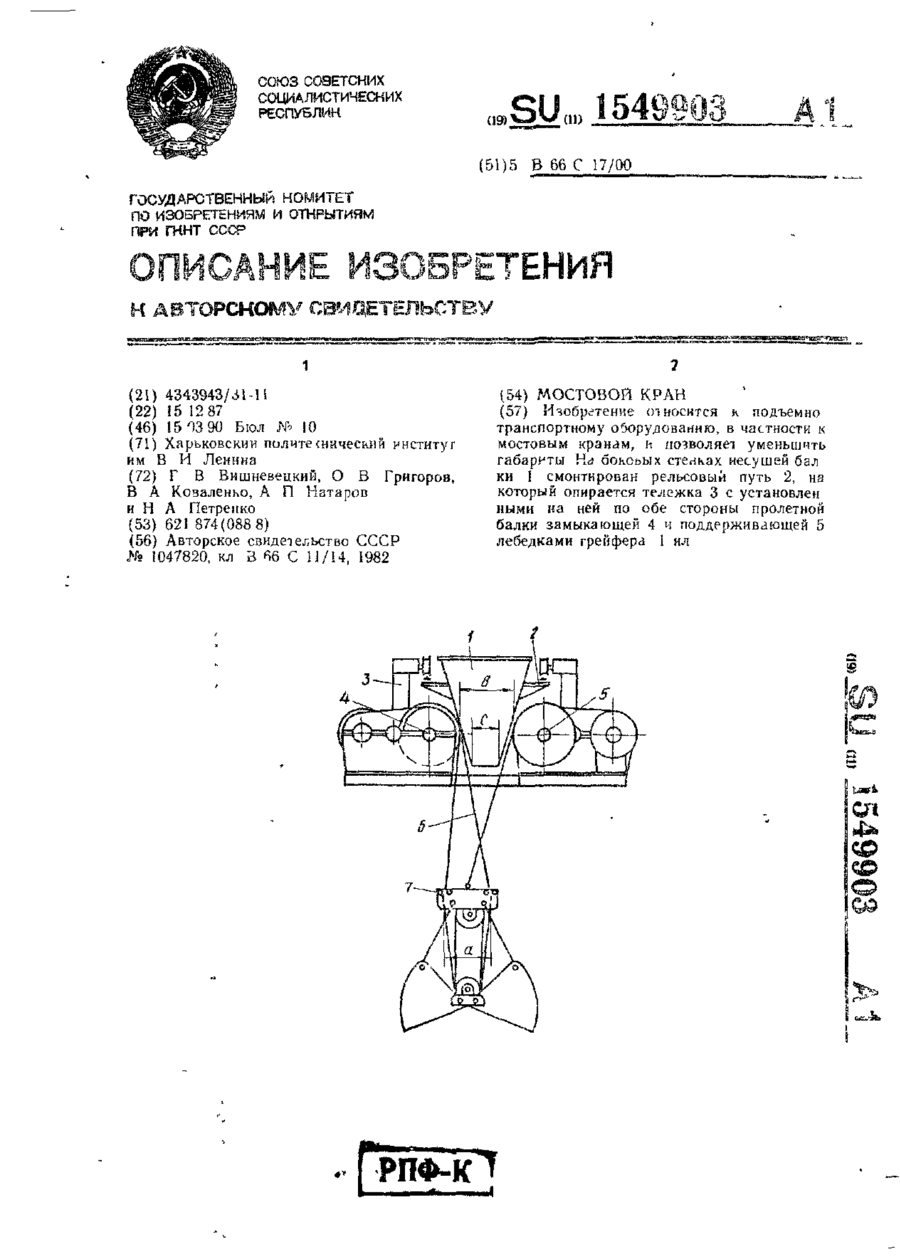
1. Мостовий кран, що складається з однопролітної і двох кінцевих балок з ходовими візками та вантажного візка, який відрізняється тим, що його оснащено двома фасадними вантажопідйомними пристроями, двома двохрейковими підкрановими коліями, розміщеними на даху будівлі і ходовими колесами з електроприводом із мікропроцесорним керуванням, а у вантажно-підйомному пристрої використані поліспасти з мікропроцесорним позиціонуванням вантажу.
2. Мостовий кран по п.1 відрізняється тим, що він виконаний переважно із трубчатих конструктивних елементів із оцинкованої сталі.
3. Мостовий кран по пп.1, 2 відрізняється тим, що проліт крану складає не менше 65м, а проліт будівлі не менше 72м.
4. Мостовий кран по пп.1, 2, 3 відрізняється тим, що довжина підкранової колії складає не менше 264м, а висота її розміщення 30м.
5. Мостовий кран по пп.1, 2, 3, 4 відрізняється тим, що він розрахований на переміщення вантажів вагою до 800т.
Текст
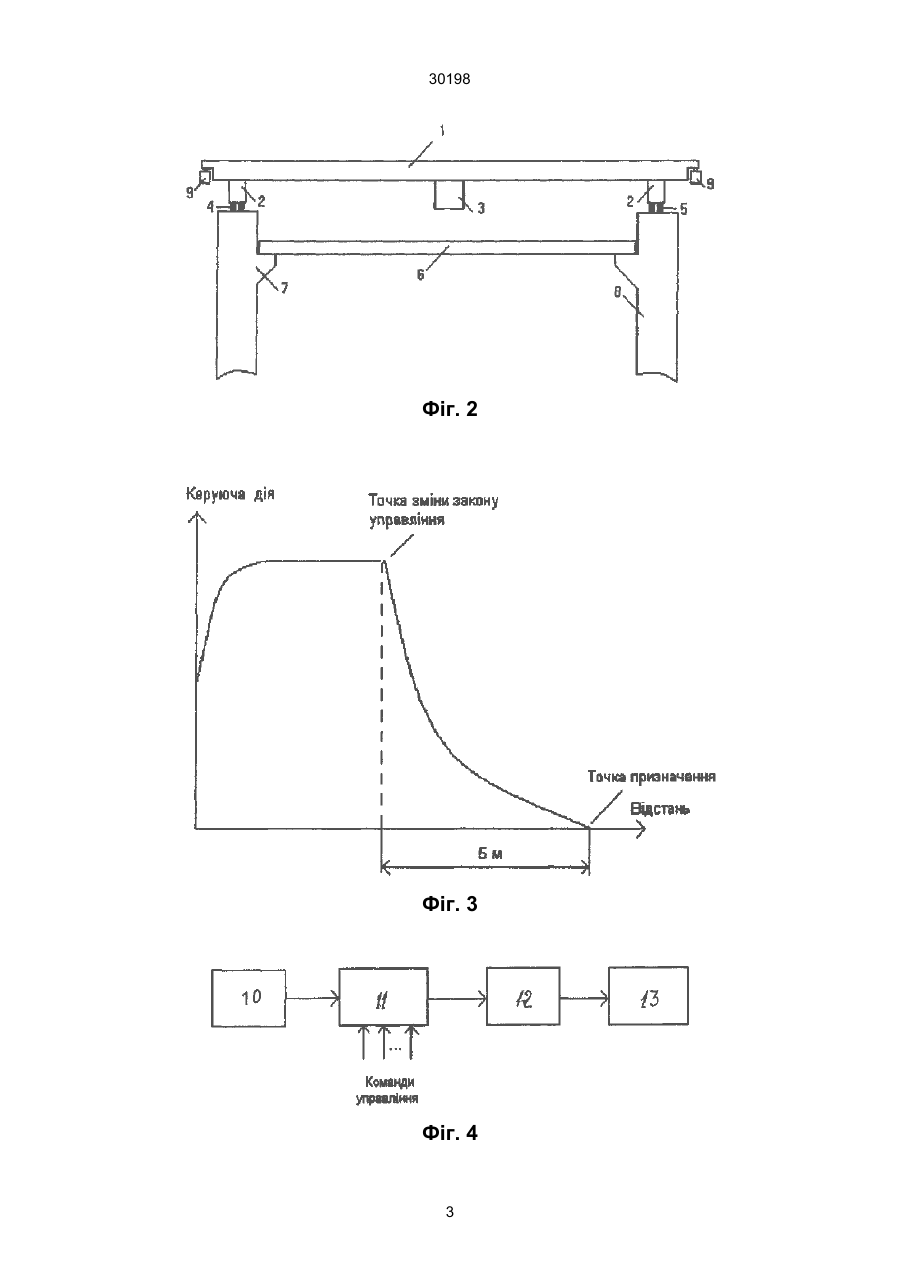
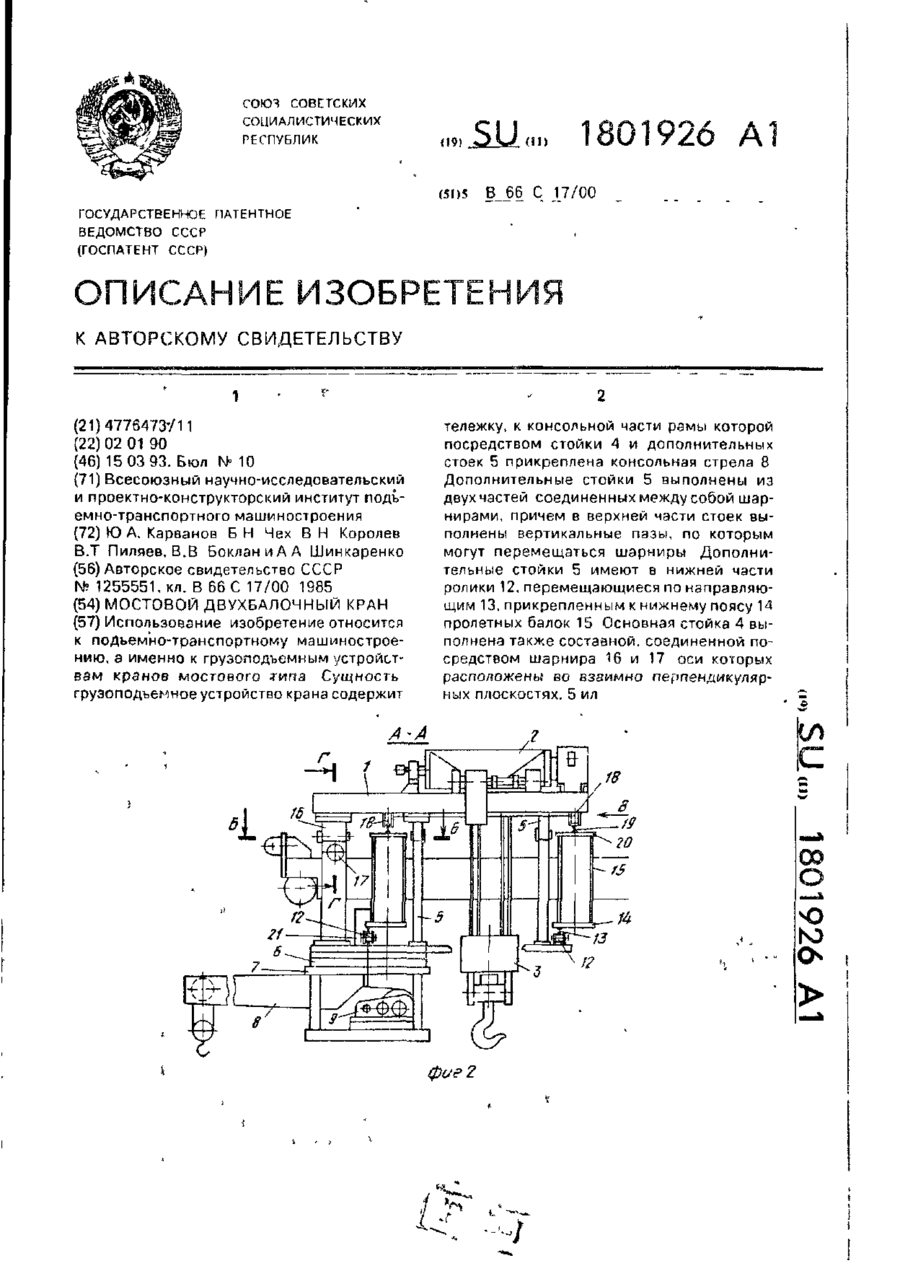
1. Мостовий кран, що складається з однопролітної і двох кінцевих балок з ходовими візками та вантажного візка, який відрізняється тим, що його оснащено двома фасадними вантажопідйомними пристроями, двома двохрейковими підкрановими коліями, розміщеними на даху будівлі і ходовими колесами з електрорприводом із мікропроцесор 30198 що дають можливість приймати вантажі з фасадних сторін будівлі і транспортувати їх вздовж пролітної балки крану. Таким чином, розширяються функціональні можливості крану. На фіг. 2 показано розміщення мостового крану при виді з торця будівлі. Використання стін будівлі в якості опорних стояків для підкранових колій суттєво знижує капітальні затрати на установку крану для демонтажу радіаційне забруднених балок перекриття будівлі, а також при транспортировці надважких вантажів. Особливою ознакою мікропроцесорного керування приводами мостового крану в пропонованому винаходові є використання нелінійного закону управління електроприводами. При цьому потужність керуючої дії на двигуни нелінійно залежить від віддалі від місця знаходження крану (або вантажопідйомників) до точки позиціонування. Графік залежності керуючої дії від відстані до пункту позиціонування зображено на фіг. 3. Принцип дії полягає в тому, що при отриманні команди управління з пульту крановщика на переміщення крану, мікропроцесорний пристрій виробляє керуючий сигнал, під дією якого потужність керуючої напруги на двигуни зростає з 50% від номінальної (для плавного пуску) до номінальної величини і потім залишається незмінною. На протязі переміщення крану мікропроцесорний пристрій виконує безперервно вимірювання відстані між фактичним положенням крану і точкою позиціонування, яка задається з пульту керування механізмом. При зменшенні цієї відстані до величини 5 м потужність керуючогої дії починає зменшуватися по гіперболічному закону і в пункті позиціонування стає рівною нулю. Таким чином, за рахунок точного формування мікропроцесором керуючого сигналу управління підвищується точність та виключається небажаний процес перерегулювання, при якому система, що рухається, за рахунок сили інерції проскакує точку позиціонування. Структурна схема мікропроцесорної системи керування показана на фіг. 4, де 10 - фотодатчик положення; 11 - мікропроцесорний пристрій; 12 проміжний перетворювач-підсилювач; 13 - привідні електродвигуни. На основі отриманої команди управління і координат фактичного положення крану, які обчислюються мікропроцесором по сигналам, що подаються із фотоелектронного датчика, який виробляє електричні імпульси на основі маркерних точок, зроблених білою фарбою на шпалах, мікропроцесор обчислює відстань до пункту призначення і виробляє при цьому керуючі сигнали відповідно з законом керування (фіг. 3). Використання чутливих сенсорів та системи мікропроцесорного керування дозволяє проводити точне позиціонування підйомно-транспортного механізму при дистанційному керуванні краном і поліпшити умови праці шляхом виносу робочого місця крановщика із небезпечної зони. Таким чином, використання у пропонованому мостовому крані фасадних вантажопідйомників та двохрейкових підкранових колій, що прокладаються безпосередньо на даху будівлі на протязі всієї довжини опорних стін, використання відповідних конструктивних матеріалів і конструктивної реалізації дозволить зменшити експлуатаційні затрати, зокрема, суттєво знизити капітальні затрати і проводити транспортування надтяжких (до 800 т) і надгабаритних (до 64 м) вантажів в умовах підвищеної радіації. Використання мікропроцесорної системи керування електроприводом і позиційнування вантажів підвищить точність позиціонування та виключить необхідність безпосереднього перебування крановщика в зоні підвищеного опромінення і тим самим поліпшить умови праці людини. Фіг. 1 2 30198 Фіг. 2 Фіг. 3 Фіг. 4 3 30198 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюBridge crane
Автори англійськоюCherneha Viktor Stepanovych, Badura Herhard Pits, Tetior Oleksandr Nykanorovych
Назва патенту російськоюМостовой кран
Автори російськоюЧернега Виктор Степанович, Бадура Герхард Пиц, Тетиор Александр Никанорович
МПК / Мітки
МПК: B66C 17/00
Код посилання
<a href="https://ua.patents.su/4-30198-mostovijj-kran.html" target="_blank" rel="follow" title="База патентів України">Мостовий кран</a>
Мостовий кран
Номер патенту: 4503
Опубліковано: 27.12.1994
Автор: Кролюк Жорж Захарович
МПК: B66C 17/00
Формула / Реферат:
Мостовой кран, содержащий пролетную балку коробчатого сечения, на которой установлены двутавровая направляющая и ходовой рельс, консольную грузовую тележку с опорными ходовыми и удерживающими колесами, перемещающимися по двутавровой направляющей и смонтированными на балансирных каретках, связанных шарнирными тягами с рамой грузовой тележки, отличающийся тем, что, с целью упрощения конструкции и снижения вертикальных нагрузок, действующих...
Мостовий кран
Номер патенту: 10323
Опубліковано: 25.12.1996
Автори: Карванов Юрій антонович, Корольов В'ячеслав Миколайович
МПК: B66C 17/00
Формула / Реферат:
1. Мостовой кран, содержащий установленный на ходовые колеса мост, составленный из пролетных и концевых балок, узел соединения, включающий закрепленные в концевых балках горизонтальные оси и шарнирно установленные на них концами стяжки, отличающийся тем, что он снабжен дополнительными стяжками, шарнирно соединенными концами с концевыми балками в нижней их части.2. Мостовой кран по п. 1, отличающийся тем, что между концевыми балками...
Мостовий кран
Номер патенту: 24105
Опубліковано: 31.08.1998
Автори: Коваленко Валентин Олександрович, Петренко Надія Олександрівна, Григоров Отто Володимирович, Натаров Олександр Павлович, Вишневецький Георгій Валентинович
МПК: B66C 17/00
Формула / Реферат:
Мостовой кран, содержащий несущую балку, грузовую тележку с ходовыми колесами, установленную с возможностью перемещения по расположенным вдоль несущей балки направляющим и имеющую охватывающую несущую балку раму с вертикальными и горизонтальными участками, на последних из которых с противоположных сторон несущей балки установлены лебедки механизмов подъема, отличающийся тем, что, с целью уменьшения габаритов, рама тележки расположена с...
Мостовий двобалочний кран
Номер патенту: 16810
Опубліковано: 29.08.1997
Автори: Шинкаренко Олександр Олексійович, Корольов В'ячеслав Миколайович, Пиляєв Валерій Тихонович, Чех Борис Миколайович, Боклан Віктор Володимирович, Карванов Юрій антонович
МПК: B66C 17/00
Мітки: мостовий, двобалочний, кран
Формула / Реферат:
Мостовой двухбалочный кран, содержащий тележку, установленную на направляющих верхних поясов пролетных балок моста, и горизонтальную консольную стрелу с поворотным устройством, связанным с рамой тележки посредством соединительного приспособления, на котором смонтированы ролики, установленные с возможностью взаимодействия с направляющими нижних поясов пролетных балок моста, отличающийся тем, что, с целью расширения зоны обслуживания и...
Вантажопідіймальний кран
Номер патенту: 20096
Опубліковано: 25.12.1997
Автор: Лищишин Омелян Іванович
МПК: B66C 23/00
Мітки: кран, вантажопідіймальний
Формула / Реферат:
1. Вантажопідіймальний кран, що включає в себе самохідне шасі, необертову частину, на якій змонтована гідравлічна система з помпами і виносними опорами, а також поворотну частину із телескопічною стрілою, гідравлічними циліндрами для висування рухомих секцій стріли, циліндр зміни нахилу стріли, механізм переміщення крюка з вантажем, який відрізняється тим, що він обладнаний системою регулювання тиску у гідросистемі у залежності від різних...
Попередній патент: Спосіб лікування алкоголізму “апаратне плацебо селезньова”
Наступний патент: Пристрій для вібраційної обробки
Випадковий патент: Експрес-метод визначення виду борошна у вафельних листах