Вібраційний копач з регульованою траєкторією коливань
Номер патенту: 34703
Опубліковано: 15.03.2001
Автори: Ярошенко Леонід Вікторович, Берник Павло Степанович, Антохов Сергій Вікторович
Формула / Реферат
1. Вібраційний копач з регульованою траєкторією коливань, що містить два лемеші зі стійками, які шарнірно встановлені на рамі і кінематичне зв'язані із приводом коливного руху, який відрізняється тим, що стійки прикріплені до штанг, які приварені до корпусів підшипників, внутрішні обойми яких насаджені на порожнинні втулки, що встановлені на привідному валу за допомогою центрувальних осей і двох груп регульованих упорів, під кутом 3-15° до осі привідного валу 1 з ексцентриситетом 1-12 мм.
2. Вібраційний копач по п. 1, який відрізняється тим, що в циліндричні отвори штанг встановлені із можливістю переміщення штоки, які своїми провушинами із сферичними шарнірами надіті на осі, що закріплені на рамі.
3. Вібраційний копач по п. 1, який відрізняється тим, що кожна із груп регульованих упорів складається із двох взаємоперлендикулярних пар гвинтів, одна із яких паралельна до центрувальних осей.
Текст
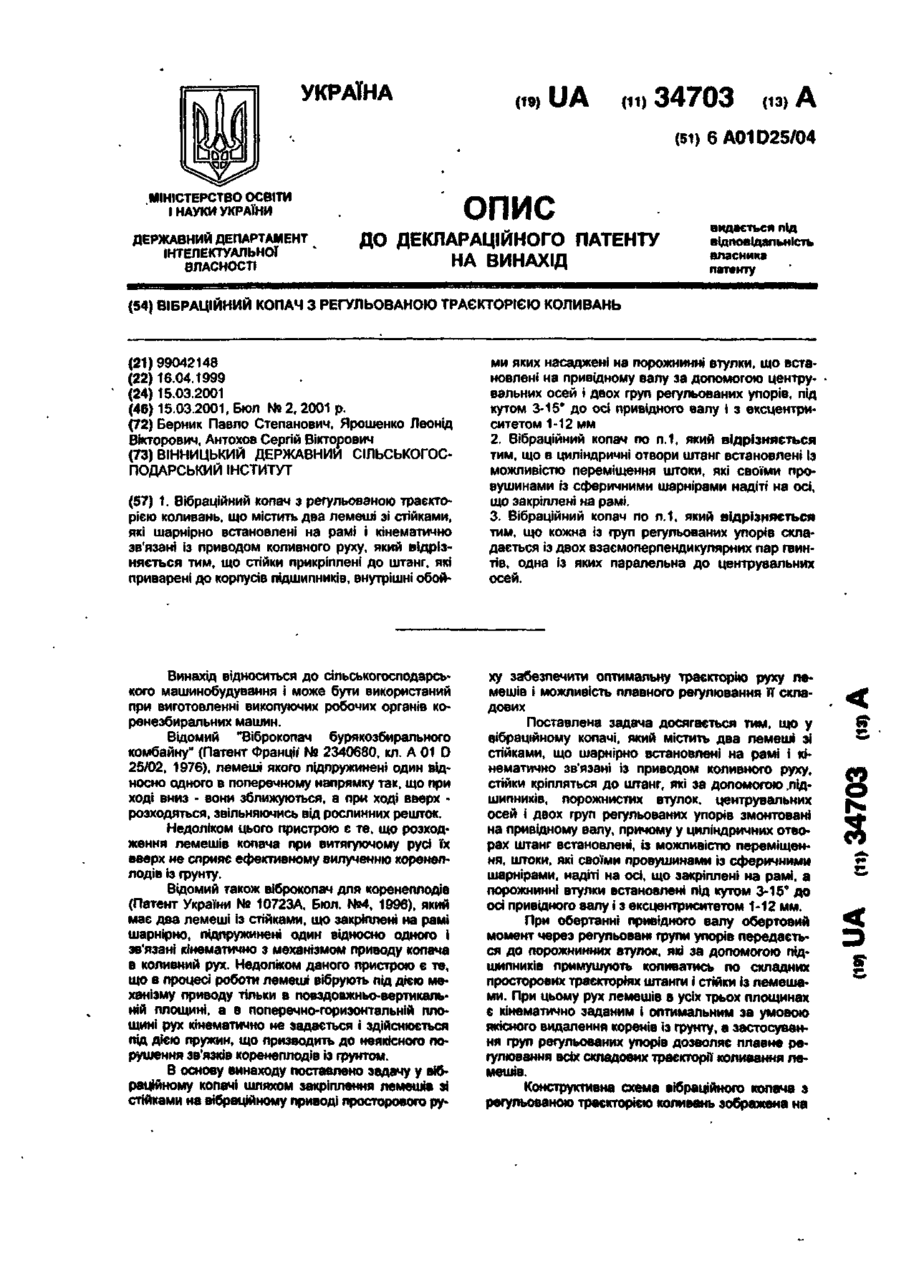
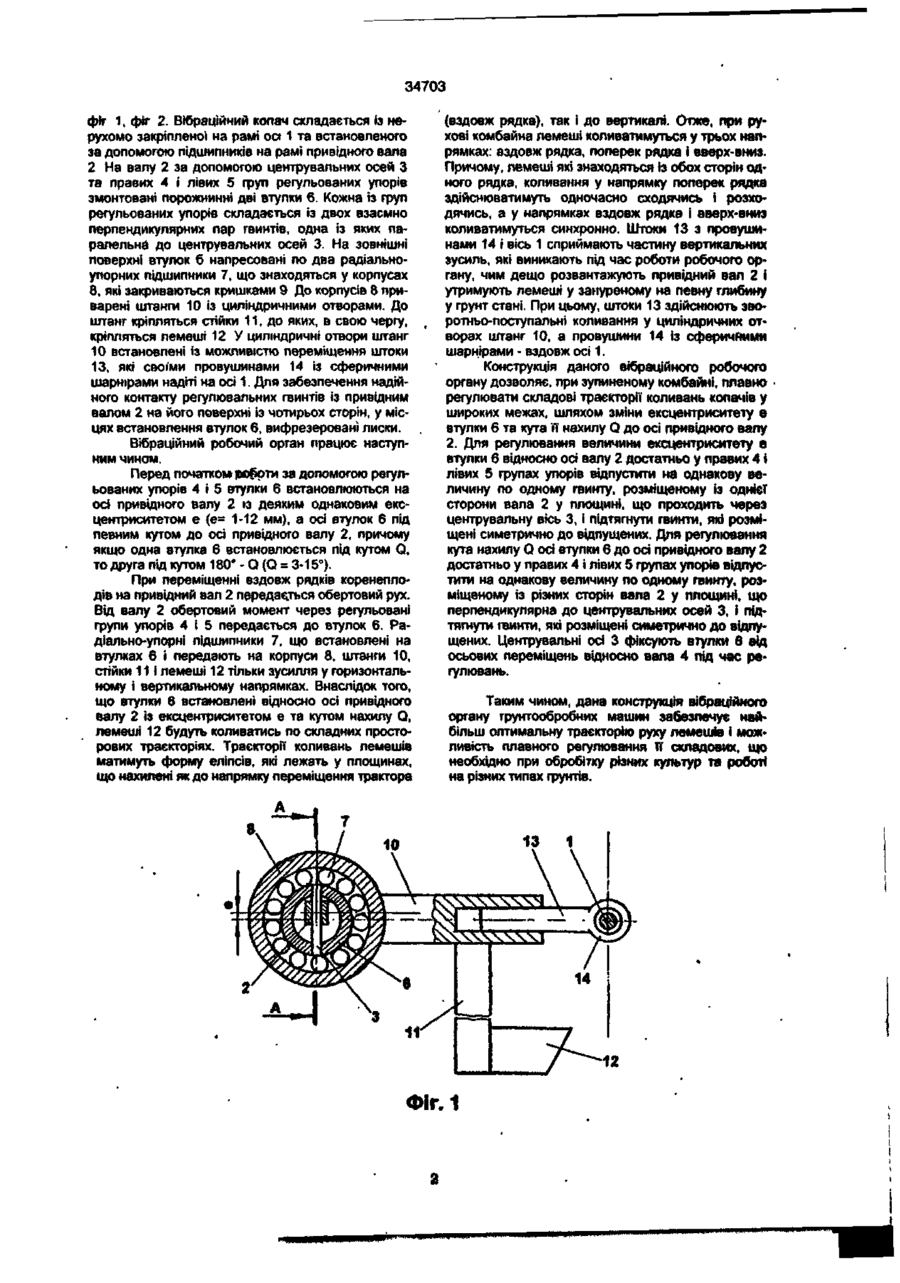
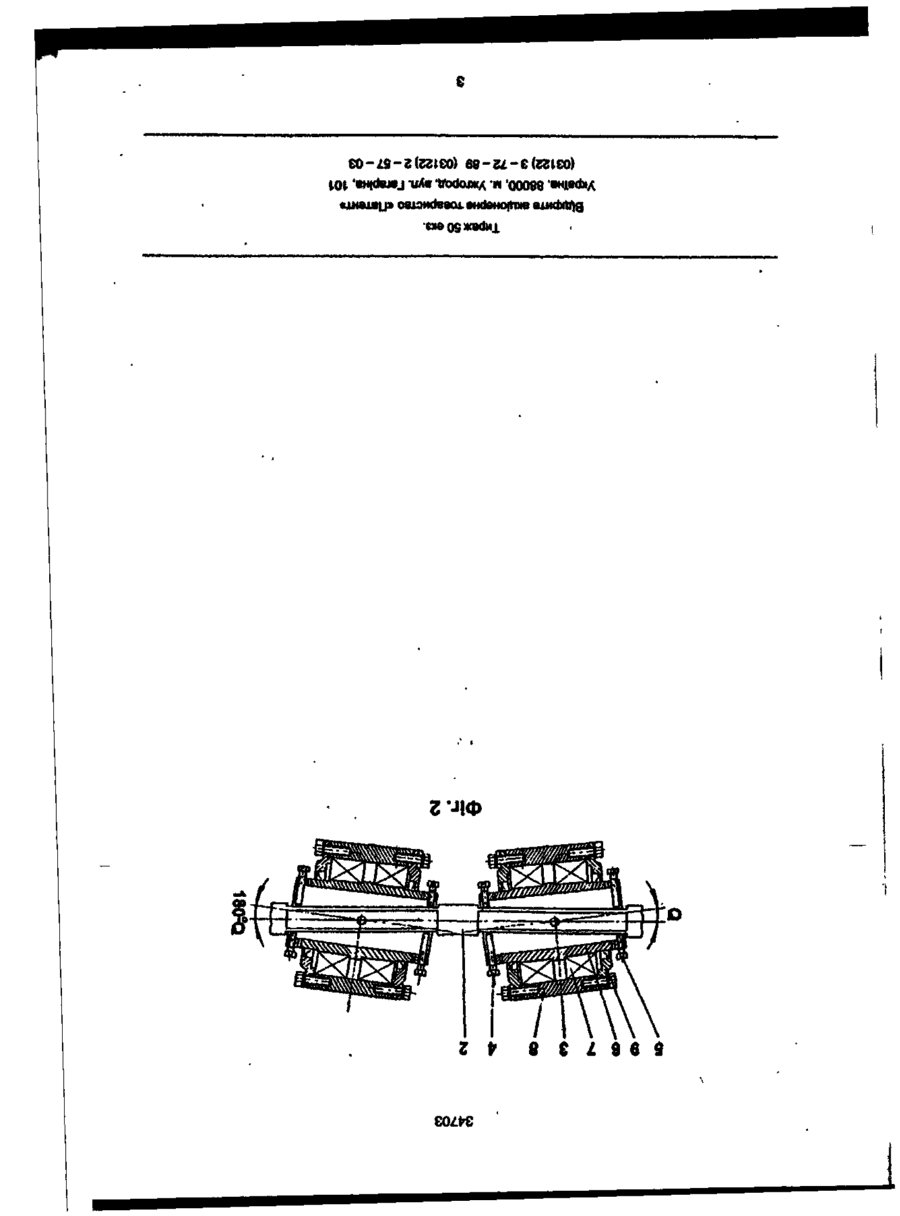
1. Вібраційний копач з регульованою траєкторією коливань, що містить два лемеші зі стійками, які шарнірно встановлені на рамі і кінематично зв'язані із приводом коливного руху, який відрізняється тим, що стійки прикріплені до штанг, які приварені до корпусів підшипників, внутрішні обой ми яких насаджені на порожнинні втулки, що встановлені на привідному валу за допомогою центрувальних осей і двох груп регульованих упорів, під кутом 3-15° до осі привідного валу і з ексцентриситетом 1-12 мм 2. Вібраційний копач по п.1, який відрізняється тим, що в циліндричні отвори штанг встановлені Із можливістю переміщення штоки, які своїми провушинами із сферичними шарнірами надіті на осі, що закріплені на рамі. 3. Вібраційний копач по п.1, який відрізняється тим, що кожна із груп регульованих упорів складається із двох взаємоперпендикулярних пар гвинтів, одна із яких паралельна до центрувальних осей. Винахід відноситься до сільськогосподарського машинобудування і може бути використаний при виготовленні викопуючих робочих органів коренезбиральних машин. Відомий "Віброкопач бурякозбирального комбайну" (Патент Франції № 2340680, кл. А 01 D 25/02, 1976), лемеші якого підпружинені один відносно одного в поперечному напрямку так, що при ході вниз - вони зближуються, а при ході вверх • розходяться, звільняючись від рослинних решток. Недоліком цього пристрою є те, що розходження лемешів копача при витягуючому русі їх вверх не сприяє ефективному вилученню коренеплодів із фунту. Відомий також віброкопач для коренеплодів (Патент України № 10723А. Бюл. №4, 1996), який має два лемеші із стійками, що закріплені на рамі шарнірно, підпружинені один відносно одного і зв'язані кінематично з механізмом приводу копача в коливний рух. Недоліком даного пристрою є те, що в процесі роботи лемеші вібрують під дією механізму приводу тільки в повздовжньо-вертикальній площині, а в поперечно-горизонтальній площині рух кінематично не задається і здійснюється лід дією пружин, що призводить до неякісного порушення зв'язків коренеплодів із фунтом. В основу винаходу поставлено задачу у вібраційному копачі шляхом закріплення лемешів зі стійками на вібраційному приводі просторового ру ху забезпечити оптимальну траєкторію руху лемешів і можливість плавного регулювання її складових Поставлена задача досягається тим, що у вібраційному копачі, який містить два лемеші зі стійками, що шарнірно встановлені на рамі і кінематично зв'язані із приводом коливного руху, стійки кріпляться до штанг, які за допомогою лідшипників, порожнистих втулок, центрувальних осей і двох фуп регульованих упорів змонтовані на привідному валу, причому у циліндричних отворах штанг встановлені, із можливістю переміщення, штоки, які своїми провушинами із сферичними шарнірами, надіті на осі, що закріплені на рамі, а порожнинні втулки встановлені під кутом 3-15° до осі привідного валу і з ексцентриситетом 1-12 мм. При обертанні привідного валу обертовий момент через регульовані фупи упорів передається до порожнинних втулок, які за допомогою підшипників примушують коливатись по складних просторових траєкторіях штанги і стійки із лемешами. При цьому рух лемешів в усіх трьох площинах є кінематично заданим і оптимальним за умовою якісного видалення коренів із фунту, а застосування фуп регульованих упорів дозволяє плавне регулювання всіх складових траєкторії коливання лемешів. Конструктивна схема вібраційного копача а регульованою траєкторією коливань зображена на S < 34703 фїг 1, фіг 2. Вібраційний копач складається із нерухомо закріпленої на рамі осі 1 та встановленого за допомогою підшипників на рамі привідного вала 2 На валу 2 за допомогою центрувальних осей З та правих 4 і лівих 5 груп регульованих упорів змонтовані порожнинні дві втулки 6. Кожна із груп регульованих упорів складається із двох взаємно перпендикулярних пар гвинтів, одна із яких паралельне до центрувальних осей 3. На зовнішні поверхні втулок б напресовані по два радіальноупорних підшипники 7, що знаходяться у корпусах 8. які закриваються кришками 9 До корпусів 8 приварені штанги 10 із циліндричними отворами. До штанг кріпляться стійки 11. до яких, в свою чергу, кріпляться лемеші 12 У циліндричні отвори штанг 10 встановлені із можливістю переміщення штоки 13, які своїми провушинами 14 із сферичними шарнірами надіті на осі 1. Для забезпечення надійного контакту регулювальних гвинтів із привідним валом 2 на його поверхні із чотирьох сторін, у місцях встановлення втулок 6, вифрезеровані лиски. Вібраційний робочий орган працює наступним чином. Перед початком роботи за допомогою регульованих упорів 4 і 5 втулки 6 встановлюються на осі привідного валу 2 із деяким однаковим ексцентриситетом є (е= 1-12 мм), а осі втулок б під певним кутом до осі привідного валу 2, причому якщо одна втулка 6 встановлюється під кутом Q, то друга під кутом 180е - Q (Q = 3-15°). При переміщенні вздовж рядків коренеплодів на привідний вал 2 передається обертовий рух. Від валу 2 обертовий момент через регульовані групи упорів 4 і 5 передається до втулок 6. Радіально-упорні підшипники 7, що встановлені на втулках 6 і передають на корпуси 8, штанги 10, стійки 11 і лемеші 12 тільки зусилля у горизонтальному і вертикальному напрямках. Внаслідок того, що втулки 6 встановлені відносно осі привідного валу 2 із ексцентриситетом є та кутом нахилу Q, лемеші 12 будуть коливатись по складних просторових траєкторіях. Траєкторії коливань лемешів матимуть форму еліпсів, які лежать у площинах, що нахилені як до напрямку переміщення трактора (вздовж рядка), так і до вертикалі. Отже, при рухові комбайна лемеші коливатимуться у трьох напрямках: вздовж рядка, поперек рядка і вверх-вниз. Причому, лемеші які знаходяться із обох сторін одного рядка, коливання у напрямку поперек рядка здійснюватимуть одночасно сходячись і розходячись, а у напрямках вздовж рядка і вверх-вниз коливатимуться синхронно. Штоки 13 з провушинами 14 і вісь 1 сприймають частину вертикальних зусиль, які виникають під час роботи робочого органу, чим дещо розвантажують привідний вал 2 і утримують лемеші у зануреному на певну глибину у фунт стані. При цьому, штоки 13 здійснюють зворотньо-поступальні коливання у циліндричних отворах штанг 10, а провушини 14 із сферичними шарнірами • вздовж осі 1. Конструкція даного вібраційного робочого органу дозволяє, при зупиненому комбайні, плавно регулювати складові траєкторії коливань копачів у широких межах, шляхом зміни ексцентриситету є втулки 6 та кута її нахилу Q до осі привідного валу 2. Для регулювання величини ексцентриситету є втулки 6 відносно осі валу 2 достатньо у правих 4 і лівих 5 групах упорів відпустити на однакову величину по одному гвинту, розміщеному із однієї сторони вапа 2 у площині, що проходить через центрувальну вісь 3, і підтягнути гвинти, які розміщені симетрично до відпущених. Для регулювання кута нахилу Q осі втулки 6 до осі привідного валу 2 достатньо у правих 4 і лівих 5 групах упорів відпустити на однакову величину по одному гвинту, розміщеному із різних сторін вала 2 у площині, що перпендикулярна до центрувальних осей 3, і підтягнути гвинти, які розміщені симетрично до відпущених. Центрувальні осі 3 фіксують втулки в від осьових переміщень відносно вала 4 під час регулювань. Таким чином, дана конструкція вібраційного органу ґрунтообробних машин забезпечує найбільш оптимальну траєкторію руху лемешів і можливість плавного регулювання її складових, що необхідно при обробітку різних культур та роботі на різних типах грунтів. ФІГ.1 в8-гг-є(ггієо) *иЛв 'tfodow(A и '00088 ' «інаіеи» оаюисіввох внсІвмо(Гтав auidxtfja Z Р 8 Є Z 9 6 З
ДивитисяДодаткова інформація
Назва патенту англійськоюVibration digger with a regulated oscillation trajectory
Автори англійськоюBernyk Pavlo Stepanovych, Yaroshenko Leonid Viktorovych, Antokhov Serhii Viktorovych
Назва патенту російськоюВибрационный копач с регулируемой траекторией колебаний
Автори російськоюБерник Павел Степанович, Ярошенко Леонид Викторович, Антохов Сергей Викторович
МПК / Мітки
МПК: A01D 25/04
Мітки: регульованою, коливань, траєкторією, вібраційний, копач
Код посилання
<a href="https://ua.patents.su/4-34703-vibracijjnijj-kopach-z-regulovanoyu-traehktoriehyu-kolivan.html" target="_blank" rel="follow" title="База патентів України">Вібраційний копач з регульованою траєкторією коливань</a>
Копач коренебульбоплодів
Номер патенту: 29975
Опубліковано: 15.11.2000
Автори: Кононенко Анатолій Філатович, Любивий Віктор Степанович, Онищенко Володимир Євгенович, Шпак Віктор Іванович, Надуда Юрій Володимирович, Калиновський Юрій Данилович, Мокроусов Віктор Андрійович
МПК: A01D 17/10
Мітки: копач, коренебульбоплодів
Формула / Реферат:
1. Копач коренебульбоплодів, складений з рами, лемеша, пруткового елеватора зі струшувачами та приводом з ведучим валом, конічним редуктором та веденим валом, який відрізняється тим, що привід встановлений на трьох корпусах підшипників, зафіксованих хомутами і кільцевими канавками, які спираються на підставки, при цьому один корпус підшипника розташований попереду вздовж осі копача на ведучому валу приводу, а два інших - поперек осі копача на...
Дисковий копач
Номер патенту: 31677
Опубліковано: 15.12.2000
Автори: Летняк Григорій Федорович, Павлов Ярослав Антонович, Безпальок Андрій Петрович, Маланчин Анатолій Миколайович, Мартиненко Володимир Якимович
МПК: A01D 25/04
Текст:
...поставлена задача вдосконалення конструкції дискового копача» в якому спрощується конструкція привіду привід го І непривідного дисків, що забезпечує надійність роботи ДИСКОВОГО копача, зменшується його вартість І металоемкість • Поставлена задача досягається за рахунок того, що в дискової копачі, що складається Із стойки, на якій встановлені під кутом один до одного привідний І непривідний диски, згідно винаходу вводит ься те,що...
Плазмовий двигун із замкненою траєкторією дрейфу електронів
Номер патенту: 27909
Опубліковано: 16.10.2000
Автори: Ніскін Валєнтін, Дессіятсков Алєксєй, Валєнтіан Домінік, Бугрова Антоніна, Морозов Алєксєй
МПК: F03H 1/00
Мітки: електронів, дрейфу, плазмовий, замкненою, двигун, траєкторією
Текст:
...электростатических поверхностей, уменьшающих расходимость ионного пучка, следствием чего являются: с1/ упрощенный монтаж на космическом аппарате, с2/ уменьшение износа канала ускорителя, Путем видоизменения в различных вариантах двигателя в соответствии с изобретением профиля магнитного поля в канале ускорителя и на входе анода, а также в пределах буферной камеры, достигают: - большей однородности плазмы, уменьше ния нарушений...
Копач для коренеплодів
Номер патенту: 30850
Опубліковано: 15.12.2000
Автори: Войтюк Дмитро Григорович, Булгаков Володимир Михайлович, Березовий Микола Георгійович, Зиков Павло Юрійович
МПК: A01D 25/04
Мітки: копач, коренеплодів
Формула / Реферат:
Копач для коренеплодів, що має гофровані диски, встановлені на горизонтальному приводному валі, розташованому під кутом до напрямку руху, спіральні навивки, що підходять до кожного диску, пасивні розпушувачі, розташовані попереду вала та транспортуючі елементи, який відрізняється тим, що вздовж периферії гофрованих дисків виконано ряд отворів.
Пристрій для вібраційної обробки

Номер патенту: 29835
Опубліковано: 15.11.2000
Автори: Берник Павло Степанович, Зозуляк Ігор Анатолійович, Ярошенко Леонід Вікторович
МПК: B24B 31/073
Мітки: пристрій, обробки, вібраційної
Текст:
...напрямках. В наслідок того, що втулка 12 відносно осі вала 4 встановлюється із деяким ексцентриситетом е, а вісь втулки 12 під певним кутом Q до осі вала 4, точки поверхні торового контейнера будуть коливатись по складним просторовим траєкторіям із зсувом фаз одна відносно одної, що призводить до інтенсивного перемішування робочого середовища і оброблюваних деталей які завантажені у контейнер, і як наслідок до інтенсифікації вібраційної...
Попередній патент: Спосіб розробки крутоспадних родовищ корисних копалин
Наступний патент: Фільтр для очищення води
Випадковий патент: Фунгіцидні похідні n-циклоалкіл-n-біфенілметилкарбоксаміду