Плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування
Номер патенту: 40526
Опубліковано: 10.04.2009
Автори: Матвієнков Сергій Анатолійович, Сидоров Сергій Михайлович, Гуленков Борис Вікторович, Юрасов Юрій Федорович, Корленштейн Мусій Емануілович, Пальчіков Андрій Володимирович, Івашина Володимир Володимирович
Формула / Реферат
1. Плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування, що складається зі сталевого корпусу, який розташовано на станині з можливістю переміщення по напрямних, на якому встановлено зіштовхувач рулонів та складаний барабан, який розташований на консолі, який приводиться до обертання за допомогою трибкової передачі асинхронним двигуном, корпус моталки з'єднано зі штоком гідроциліндра переміщування, розташованого на станині, а подача робочої рідини до відповідної порожнини гідроциліндра здійснюється за допомогою гідророзподільника, яка відрізняється тим, що на рольґанґу додатково встановлено псевдоаналоговий датчик положення смуги металу та псевдоаналоговий датчик положення барабана моталки у просторі, а також систему керування оснащено програмованим контролером, причому сигнал керування гідророзподільником надходить з програмованого контролера системи керування плаваючою моталкою в залежності від сигналів жорсткого зворотного зв'язку з псевдоаналогового датчика положення смуги металу та з псевдоаналогового датчика положення барабана моталки у просторі.
2. Плаваюча моталка за п. 1, яка відрізняється тим, що електропривод виконано на базі асинхронного двигуна, який підключено до перетворювача частоти з програмованим контролером системи керування плаваючою моталкою, що використовує результати непрямих вимірювань сили намотування смуги металу за допомогою зворотного зв'язку від перетворювача частоти.
Текст
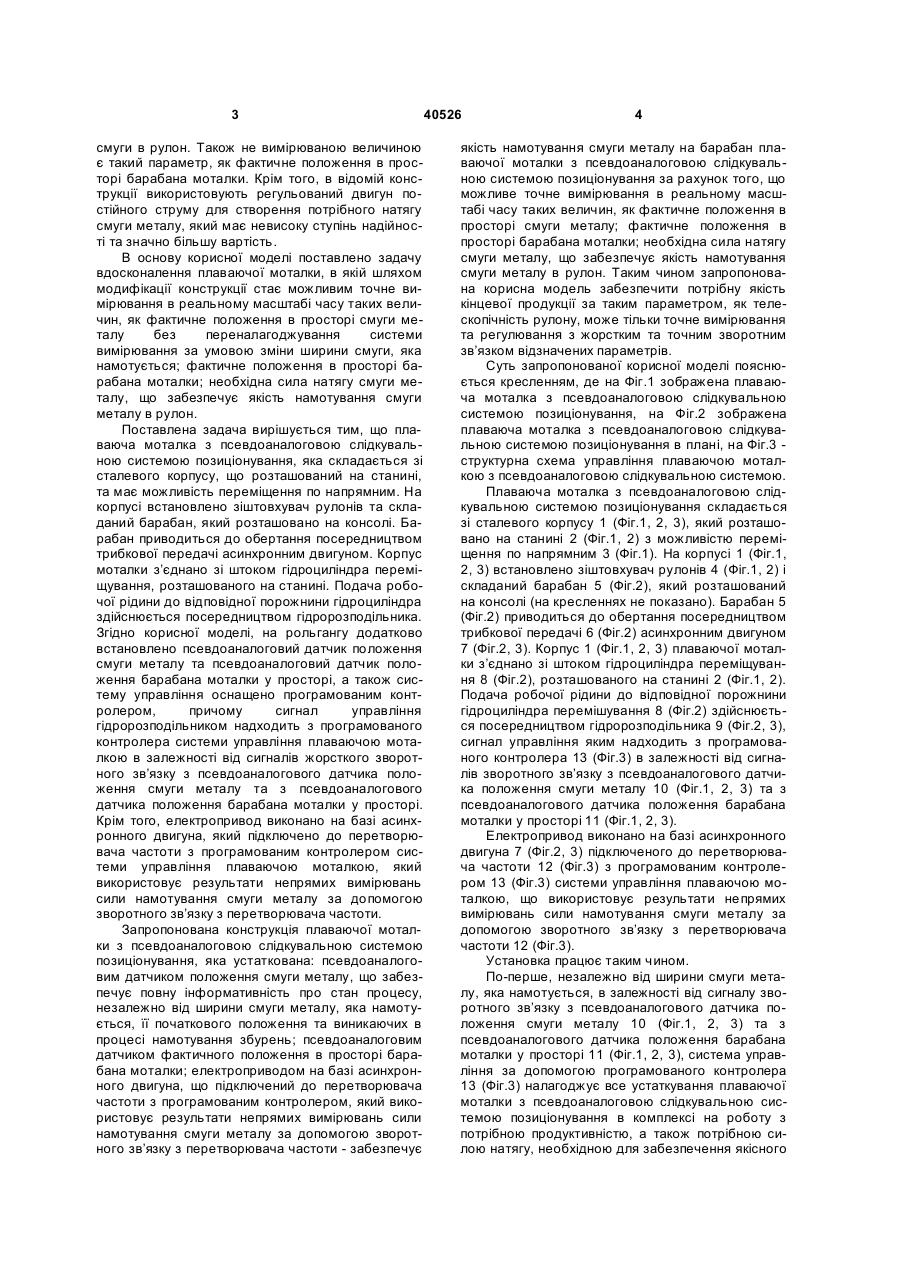
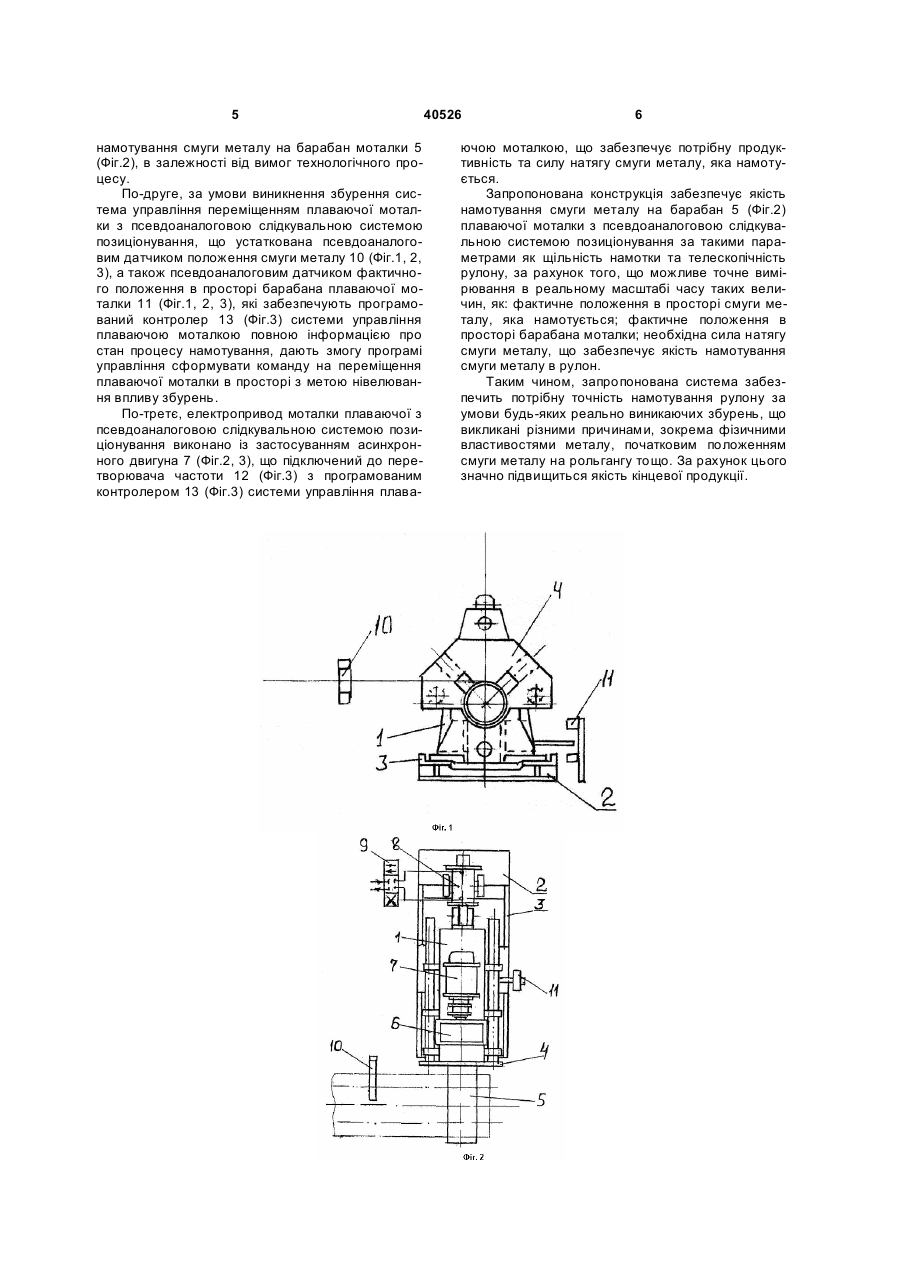
1. Плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування, що складається зі сталевого корпусу, який розташовано на станині з можливістю переміщення по напрямних, на якому встановлено зіштовхувач рулонів та складаний барабан, який розташований на консолі, який приводиться до обертання за допомогою трибкової передачі асинхронним двигуном, корпус моталки з'єднано зі штоком гідроциліндра U 2 (19) 1 3 смуги в рулон. Також не вимірюваною величиною є такий параметр, як фактичне положення в просторі барабана моталки. Крім того, в відомій конструкції використовують регульований двигун постійного струму для створення потрібного натягу смуги металу, який має невисоку ступінь надійності та значно більшу вартість. В основу корисної моделі поставлено задачу вдосконалення плаваючої моталки, в якій шляхом модифікації конструкції стає можливим точне вимірювання в реальному масштабі часу таких величин, як фактичне положення в просторі смуги металу без переналагоджування системи вимірювання за умовою зміни ширини смуги, яка намотується; фактичне положення в просторі барабана моталки; необхідна сила натягу смуги металу, що забезпечує якість намотування смуги металу в рулон. Поставлена задача вирішується тим, що плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування, яка складається зі сталевого корпусу, що розташований на станині, та має можливість переміщення по напрямним. На корпусі встановлено зіштовхувач рулонів та складаний барабан, який розташовано на консолі. Барабан приводиться до обертання посередництвом трибкової передачі асинхронним двигуном. Корпус моталки з’єднано зі штоком гідроциліндра переміщування, розташованого на станині. Подача робочої рідини до відповідної порожнини гідроциліндра здійснюється посередництвом гідророзподільника. Згідно корисної моделі, на рольгангу додатково встановлено псевдоаналоговий датчик положення смуги металу та псевдоаналоговий датчик положення барабана моталки у просторі, а також систему управління оснащено програмованим контролером, причому сигнал управління гідророзподільником надходить з програмованого контролера системи управління плаваючою моталкою в залежності від сигналів жорсткого зворотного зв’язку з псевдоаналогового датчика положення смуги металу та з псевдоаналогового датчика положення барабана моталки у просторі. Крім того, електропривод виконано на базі асинхронного двигуна, який підключено до перетворювача частоти з програмованим контролером системи управління плаваючою моталкою, який використовує результати непрямих вимірювань сили намотування смуги металу за допомогою зворотного зв’язку з перетворювача частоти. Запропонована конструкція плаваючої моталки з псевдоаналоговою слідкувальною системою позиціонування, яка устаткована: псевдоаналоговим датчиком положення смуги металу, що забезпечує повну інформативність про стан процесу, незалежно від ширини смуги металу, яка намотується, її початкового положення та виникаючих в процесі намотування збурень; псевдоаналоговим датчиком фактичного положення в просторі барабана моталки; електроприводом на базі асинхронного двигуна, що підключений до перетворювача частоти з програмованим контролером, який використовує результати непрямих вимірювань сили намотування смуги металу за допомогою зворотного зв’язку з перетворювача частоти - забезпечує 40526 4 якість намотування смуги металу на барабан плаваючої моталки з псевдоаналоговою слідкувальною системою позиціонування за рахунок того, що можливе точне вимірювання в реальному масштабі часу таких величин, як фактичне положення в просторі смуги металу; фактичне положення в просторі барабана моталки; необхідна сила натягу смуги металу, що забезпечує якість намотування смуги металу в рулон. Таким чином запропонована корисна модель забезпечити потрібну якість кінцевої продукції за таким параметром, як телескопічність рулону, може тільки точне вимірювання та регулювання з жорстким та точним зворотним зв’язком відзначених параметрів. Суть запропонованої корисної моделі пояснюється кресленням, де на Фіг.1 зображена плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування, на Фіг.2 зображена плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування в плані, на Фіг.3 структурна схема управління плаваючою моталкою з псевдоаналоговою слідкувальною системою. Плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування складається зі сталевого корпусу 1 (Фіг.1, 2, 3), який розташовано на станині 2 (Фіг.1, 2) з можливістю переміщення по напрямним 3 (Фіг.1). На корпусі 1 (Фіг.1, 2, 3) встановлено зіштовхувач рулонів 4 (Фіг.1, 2) і складаний барабан 5 (Фіг.2), який розташований на консолі (на кресленнях не показано). Барабан 5 (Фіг.2) приводиться до обертання посередництвом трибкової передачі 6 (Фіг.2) асинхронним двигуном 7 (Фіг.2, 3). Корпус 1 (Фіг.1, 2, 3) плаваючої моталки з’єднано зі штоком гідроциліндра переміщування 8 (Фіг.2), розташованого на станині 2 (Фіг.1, 2). Подача робочої рідини до відповідної порожнини гідроциліндра перемішування 8 (Фіг.2) здійснюється посередництвом гідророзподільника 9 (Фіг.2, 3), сигнал управління яким надходить з програмованого контролера 13 (Фіг.3) в залежності від сигналів зворотного зв’язку з псевдоаналогового датчика положення смуги металу 10 (Фіг.1, 2, 3) та з псевдоаналогового датчика положення барабана моталки у просторі 11 (Фіг.1, 2, 3). Електропривод виконано на базі асинхронного двигуна 7 (Фіг.2, 3) підключеного до перетворювача частоти 12 (Фіг.3) з програмованим контролером 13 (Фіг.3) системи управління плаваючою моталкою, що використовує результати непрямих вимірювань сили намотування смуги металу за допомогою зворотного зв’язку з перетворювача частоти 12 (Фіг.3). Установка працює таким чином. По-перше, незалежно від ширини смуги металу, яка намотується, в залежності від сигналу зворотного зв’язку з псевдоаналогового датчика положення смуги металу 10 (Фіг.1, 2, 3) та з псевдоаналогового датчика положення барабана моталки у просторі 11 (Фіг.1, 2, 3), система управління за допомогою програмованого контролера 13 (Фіг.3) налагоджує все устаткування плаваючої моталки з псевдоаналоговою слідкувальною системою позиціонування в комплексі на роботу з потрібною продуктивністю, а також потрібною силою натягу, необхідною для забезпечення якісного 5 намотування смуги металу на барабан моталки 5 (Фіг.2), в залежності від вимог технологічного процесу. По-друге, за умови виникнення збурення система управління переміщенням плаваючої моталки з псевдоаналоговою слідкувальною системою позиціонування, що устаткована псевдоаналоговим датчиком положення смуги металу 10 (Фіг.1, 2, 3), а також псевдоаналоговим датчиком фактичного положення в просторі барабана плаваючої моталки 11 (Фіг.1, 2, 3), які забезпечують програмований контролер 13 (Фіг.3) системи управління плаваючою моталкою повною інформацією про стан процесу намотування, дають змогу програмі управління сформувати команду на переміщення плаваючої моталки в просторі з метою нівелювання впливу збурень. По-третє, електропривод моталки плаваючої з псевдоаналоговою слідкувальною системою позиціонування виконано із застосуванням асинхронного двигуна 7 (Фіг.2, 3), що підключений до перетворювача частоти 12 (Фіг.3) з програмованим контролером 13 (Фіг.3) системи управління плава 40526 6 ючою моталкою, що забезпечує потрібну продуктивність та силу натягу смуги металу, яка намотується. Запропонована конструкція забезпечує якість намотування смуги металу на барабан 5 (Фіг.2) плаваючої моталки з псевдоаналоговою слідкувальною системою позиціонування за такими параметрами як щільність намотки та телескопічність рулону, за рахунок того, що можливе точне вимірювання в реальному масштабі часу таких величин, як: фактичне положення в просторі смуги металу, яка намотується; фактичне положення в просторі барабана моталки; необхідна сила натягу смуги металу, що забезпечує якість намотування смуги металу в рулон. Таким чином, запропонована система забезпечить потрібну точність намотування рулону за умови будь-яких реально виникаючих збурень, що викликані різними причинами, зокрема фізичними властивостями металу, початковим положенням смуги металу на рольгангу тощо. За рахунок цього значно підвищиться якість кінцевої продукції. 7 Комп’ютерна верстка Л. Купенко 40526 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFloating winder with pseudo-analog servo system of positioning
Автори англійськоюMatvienkov Serhii Anatoliiovych, Ivashyna Volodymyr Volodymyrovych, Palchikov Andrii Volodymyrovych, Hulenkov Borys Viktorovych, Sydorov Serhii Mykhailovych, Yurasov Yurii Fedorovych, Korlenshtein Musii Emanuilovych
Назва патенту російськоюПлавающая моталка с псевдоаналоговой следящей системой позиционирования
Автори російськоюМатвиенков Сергей Анатольевич, Ивашина Владимир Владимирович, Пальчиков Андрей Владимирович, Гуленков Борис Викторович, Сидоров Сергей Михайлович, Юрасов Юрий Федорович, Корленштейн Моисей Эммануилович
МПК / Мітки
МПК: B21B 1/00
Мітки: моталка, системою, плаваюча, слідкувальною, псевдоаналоговою, позиціонування
Код посилання
<a href="https://ua.patents.su/4-40526-plavayucha-motalka-z-psevdoanalogovoyu-slidkuvalnoyu-sistemoyu-pozicionuvannya.html" target="_blank" rel="follow" title="База патентів України">Плаваюча моталка з псевдоаналоговою слідкувальною системою позиціонування</a>
Моталка гарячої штаби
Номер патенту: 40205
Опубліковано: 16.07.2001
Автори: Єршов Валентин Олександрович, Осокін Анатолій Андрійович, Білобров Юрій Миколайович
МПК: B21C 47/24
Мітки: моталка, гарячої, штаби
Формула / Реферат:
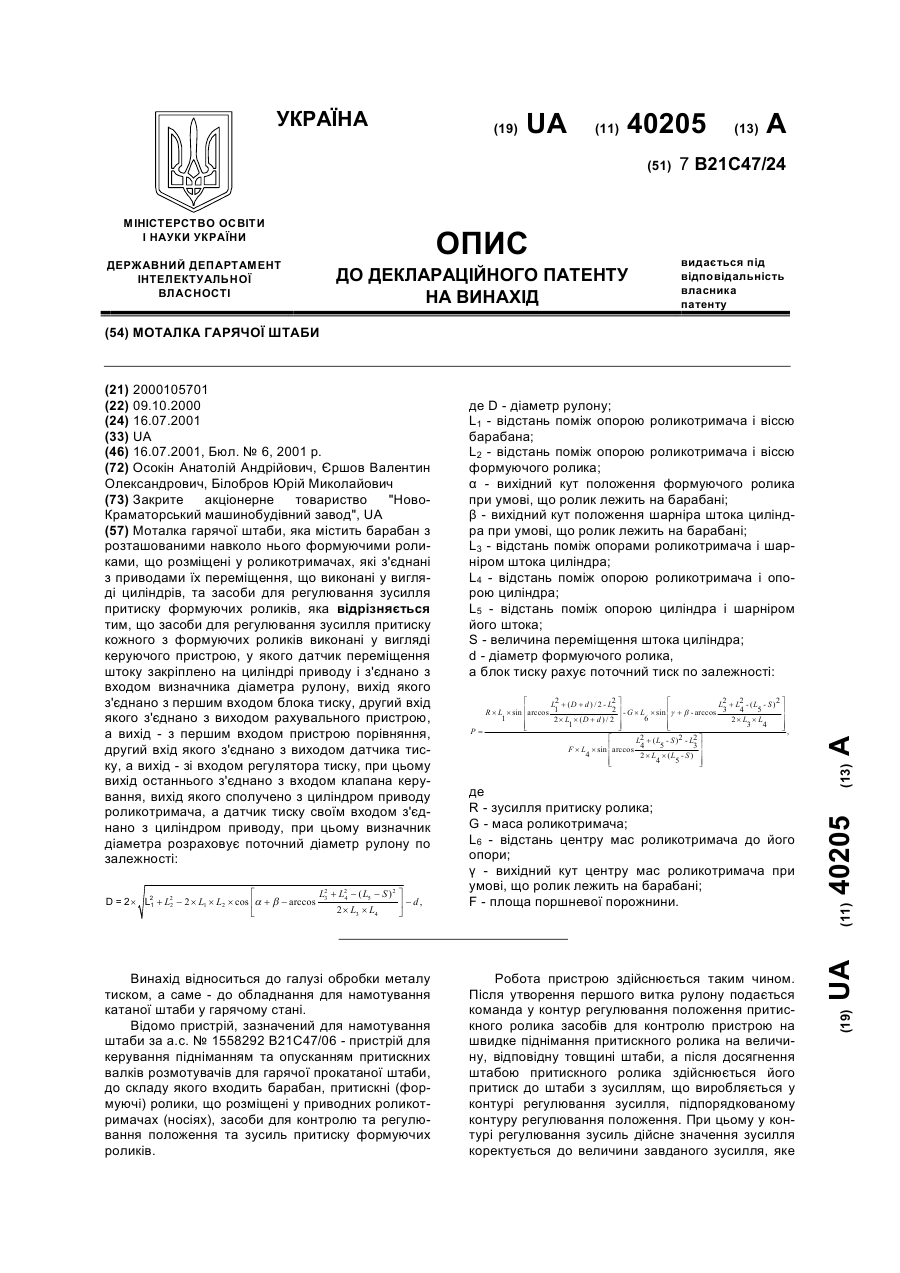
Моталка гарячої штаби, яка містить барабан з розташованими навколо нього формуючими роликами, що розміщені у роликотримачах, які з'єднані з приводами їх переміщення, що виконані у вигляді циліндрів, та засоби для регулювання зусилля притиску формуючих роликів, яка відрізняється тим, що засоби для регулювання зусилля притиску кожного з формуючих роликів виконані у вигляді керуючого пристрою, у якого датчик переміщення штоку закріплено на...
Безредукторна моталка
Номер патенту: 71152
Опубліковано: 15.11.2004
Автори: Нотченко Віктор Данилович, Запара Борис Михайлович
МПК: B21C 47/28
Мітки: моталка, безредукторна
Формула / Реферат:
1. Безредукторна моталка для намотки штабового матеріалу, що включає нерухому станину, встановлений в ній пустотілий вал з закріпленим в ньому розкладним барабаном, який має пересувний в осьовому напрямку клиновий вал і механізм його пересування, а також встановлений співвісно з пустотілим валом його привід, яка відрізняється тим, що механізм пересування клинового вала виконаний у вигляді зв'язаного з приводом проміжного вала, з'єднаного з...
Моталка
Номер патенту: 5022
Опубліковано: 28.12.1994
Автори: Волков Анатолій Олександрович, Клігман Віталій Давідович, Бараб-Тарле Матусь Єлев, Смелянська Лариса Іванівна
МПК: B21C 47/00
Мітки: моталка
Формула / Реферат:
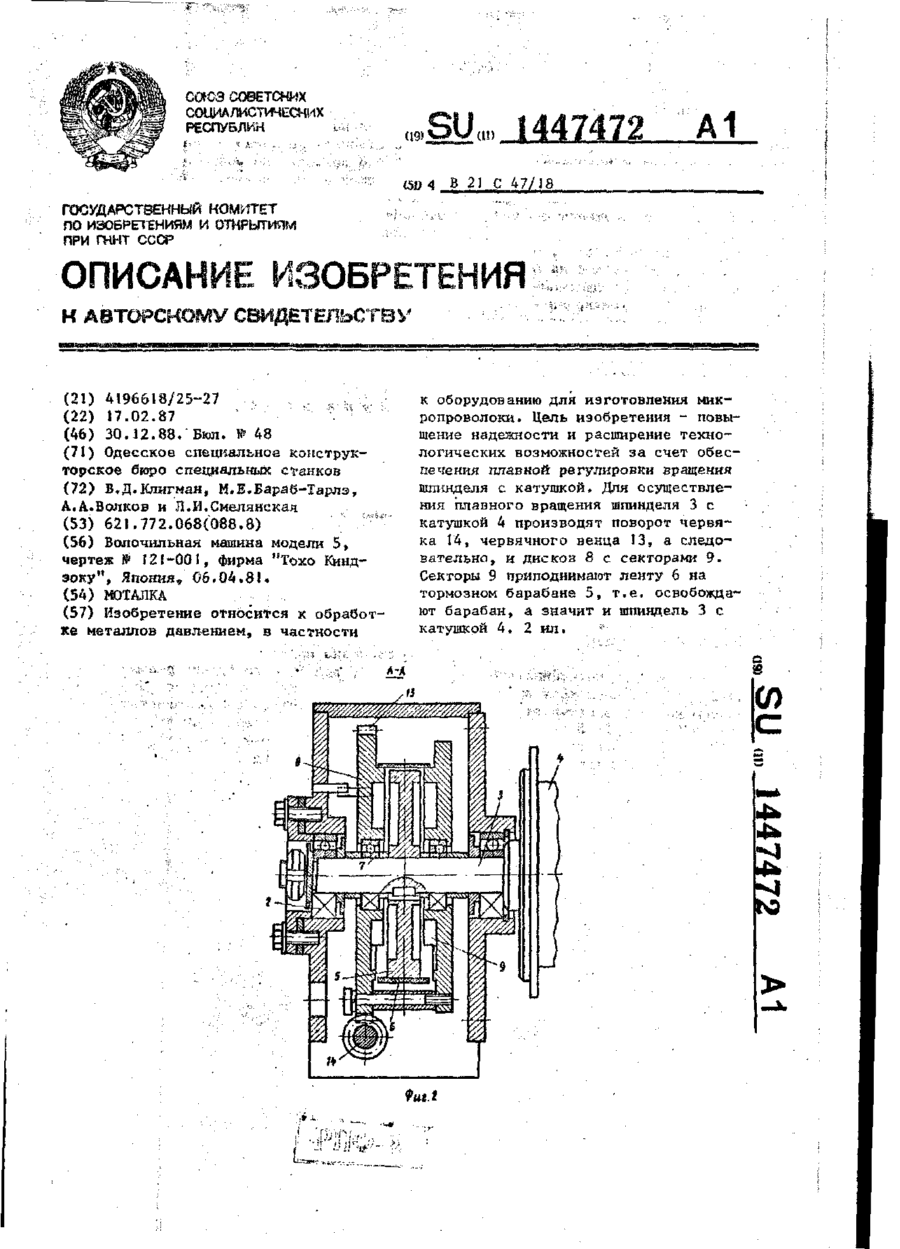
Моталка, содержащая смонтированный в опорах корпуса шпиндель для установки катушки, закрепленный на шпинделе тормозной барабан, охватывающую последний ленту, а также узел натяжения ленты, отличающаяся тем, что, с целью повышения надежности и расширения технологических возможностей за счет обеспечения плавной регулировки вращения шпинделя с катушкой, она снабжена смонтированными на шпинделе по обе стороны от тормозного барабана приводными...
Пристрій для позиціонування діагностичної апаратури на обличчі
Номер патенту: 26484
Опубліковано: 25.09.2007
Автори: Костюк Тетяна Михайлівна, Маланчук Владислав Олександрович, Литовченко Наталія Михайлівна, Воловар Оксана Степанівна
МПК: A61C 19/04
Мітки: позиціонування, апаратури, пристрій, обличчі, діагностичної
Формула / Реферат:
Пристрій для позиціонування діагностичної апаратури на обличчі, що містить фіксуючу частину та просторову систему координат, що показує положення моторної точки жувального м'яза, який відрізняється тим, що фіксуюча частина виконана у вигляді стабільної жорсткої конструкції з опорою на нерухомі кісткові анатомічні структури і складається з двох жорстких рамок, з'єднаних гвинтами та оснащених ковзаючими лінійками, які градуйовані по типу...
Спосіб позиціонування голови глядача при використанні нашоломного дисплея
Номер патенту: 81939
Опубліковано: 25.02.2008
Автори: Ощепков Антон Анатольович, Ощепков Анатолій Миколайович
МПК: H04N 3/00, G02B 27/22, G01B 7/00
Мітки: спосіб, нашоломного, позиціонування, глядача, дисплея, використанні, голови
Формула / Реферат:
1. Спосіб позиціонування голови глядача при використанні нашоломного дисплея, при якому визначають кутове положення голови глядача відносно першої системи координат, у якій формують зображення на дисплей, і цю інформацію передають у систему візуалізації нашоломного дисплея, який відрізняється тим, що попередньо визначають вектор кутової швидкості другої, зв'язаної з головою глядача, системи координат за допомогою закріплених на його голові...
Попередній патент: Двоімпульсний регулятор частоти обертання двигуна внутрішнього згоряння
Наступний патент: Спосіб комбінованого зміцнення циліндричних металевих виробів
Випадковий патент: Обладнання для виготовлення з термопластичного матеріалу покриття типу "штучна трава"