Безпілотний літальний апарат

Формула / Реферат
1. Безпілотний літальний апарат, виконаний з можливістю знаходження в двох станах: польотному та транспортування і зберігання, що містить фюзеляж, утворений з носової частини та хвостової балки, крило та хвостове оперення, виконане у вигляді V-подібного стабілізатора, який відрізняється тим, що на носовій частині фюзеляжу встановлено знімне двоколісне шасі, а на хвостовій балці - посадковий костиль, крім того, з метою зручного транспортування і зберігання крило виконане з можливістю розбирання на три секції: дві консолі та центроплан, які в польотному стані з'єднані штирями по лонжерону та фіксовані за допомогою різьбових та контрувальних з'єднань, причому консолі крила виконані зі стрілоподібністю уперед та з рульовими поверхнями на їх задній кромці у вигляді елеронів, хвостове оперення виконане з можливістю розбирання на дві секції, які в польотному стані з'єднані по штирових трубчастих з'єднаннях та фіксовані за допомогою різьбових та контрувальних з'єднань, фюзеляж виконаний з можливістю розбирання на дві секції: носову частину і хвостову балку, які в польотному стані з'єднані по стикувальному фланцевому з'єднанню та фіксовані за допомогою різьбових та контрувальних з'єднань, усередині носової частини фюзеляжу розміщені силова установка, паливний бак, система керування і бортове обладнання, призначене для керування від дистанційного пункту та навігації у автономному польоті, та відсік для корисного навантаження, силова установка виконана у вигляді двигуна з вихідним валом та закріпленим на вихідному валу дволопатевим гвинтом.
2. Безпілотний літальний апарат за п. 1, який відрізняється тим, що для виготовлення складових фюзеляжу використані склопластик та епоксидна смола, для виготовлення складових крила та стабілізатора - склопластик, вуглепластик, смола епоксидна та конструкційний пінопласт.
3. Безпілотний літальний апарат за п. 2, який відрізняється тим, що фюзеляж, крило і стабілізатор виготовлені з застосуванням методу формовки в матрицю.
4. Безпілотний літальний апарат за п. 1, який відрізняється тим, що відсік для корисного навантаження містить апаратуру для аерозйомки.
5. Безпілотний літальний апарат за п. 1, який відрізняється тим, що відсік для корисного навантаження містить обладнання для поливу або обприскування сільськогосподарських угідь.
6. Безпілотний літальний апарат за п. 1, який відрізняється тим, що має розмах крила 5,0-5,5 м, площу крила 3,0 м2, довжину 2,8-3,15 м, висоту 1,05-1,08 м, льотну масу 50-100 кг, масу корисного навантаження до 50 кг.
Текст
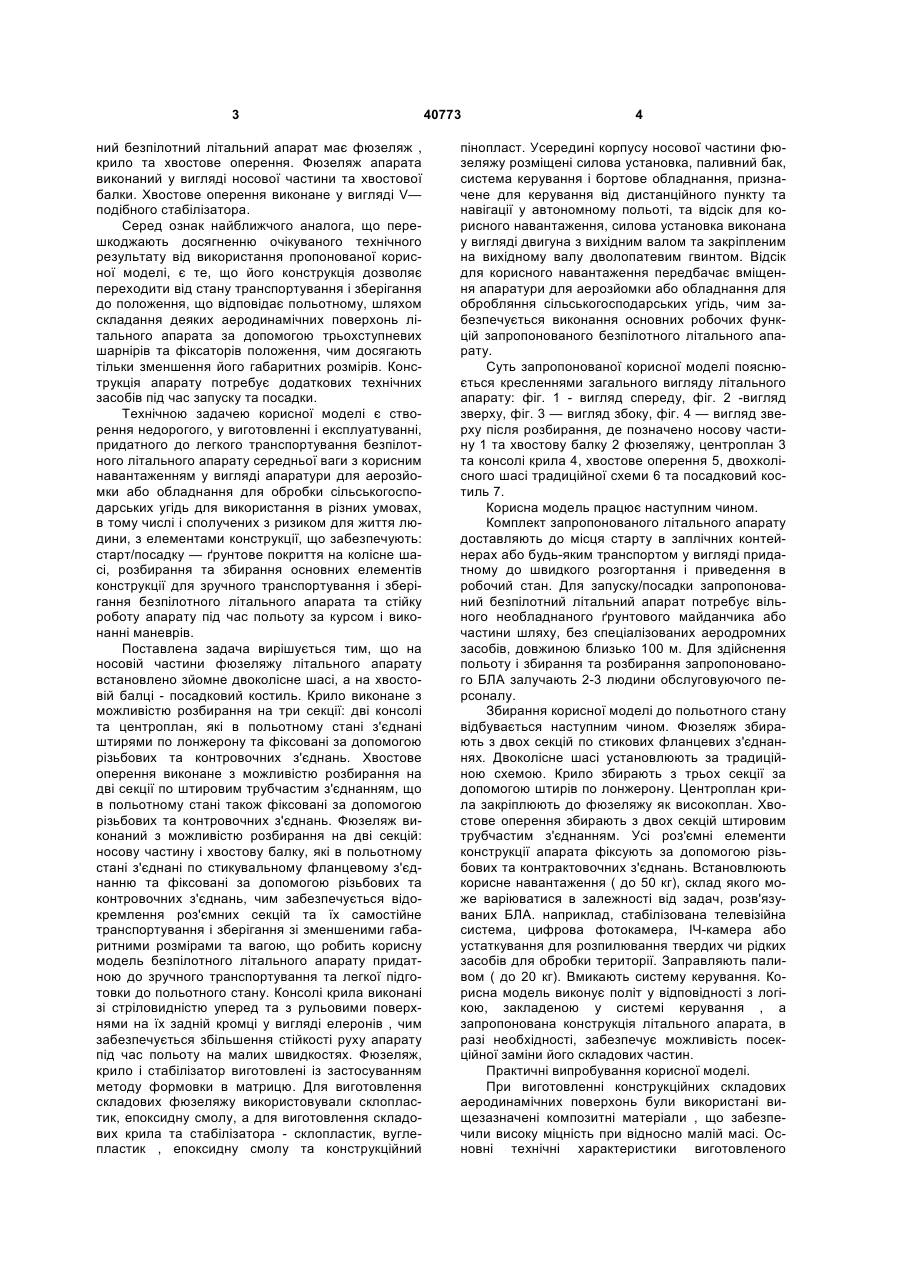
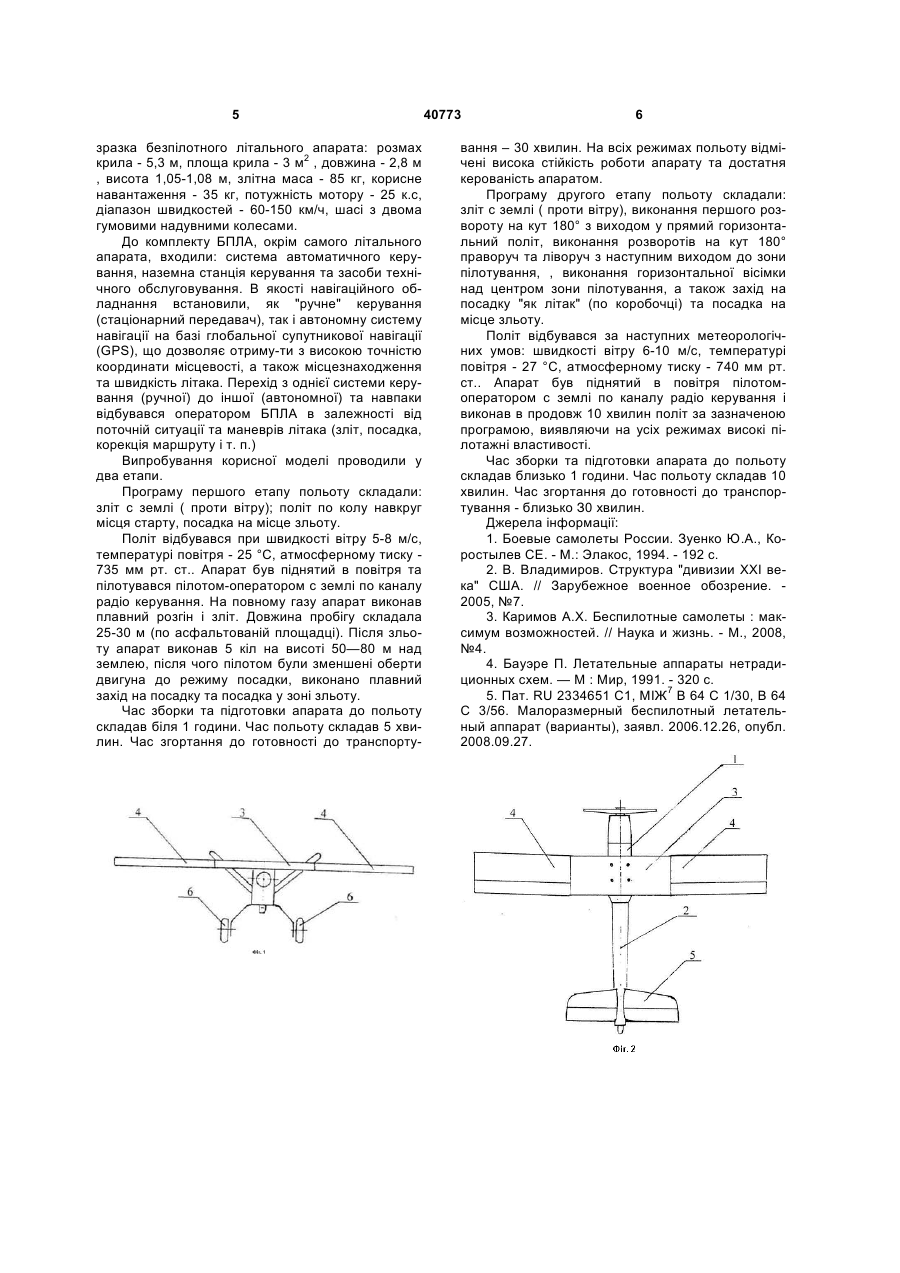
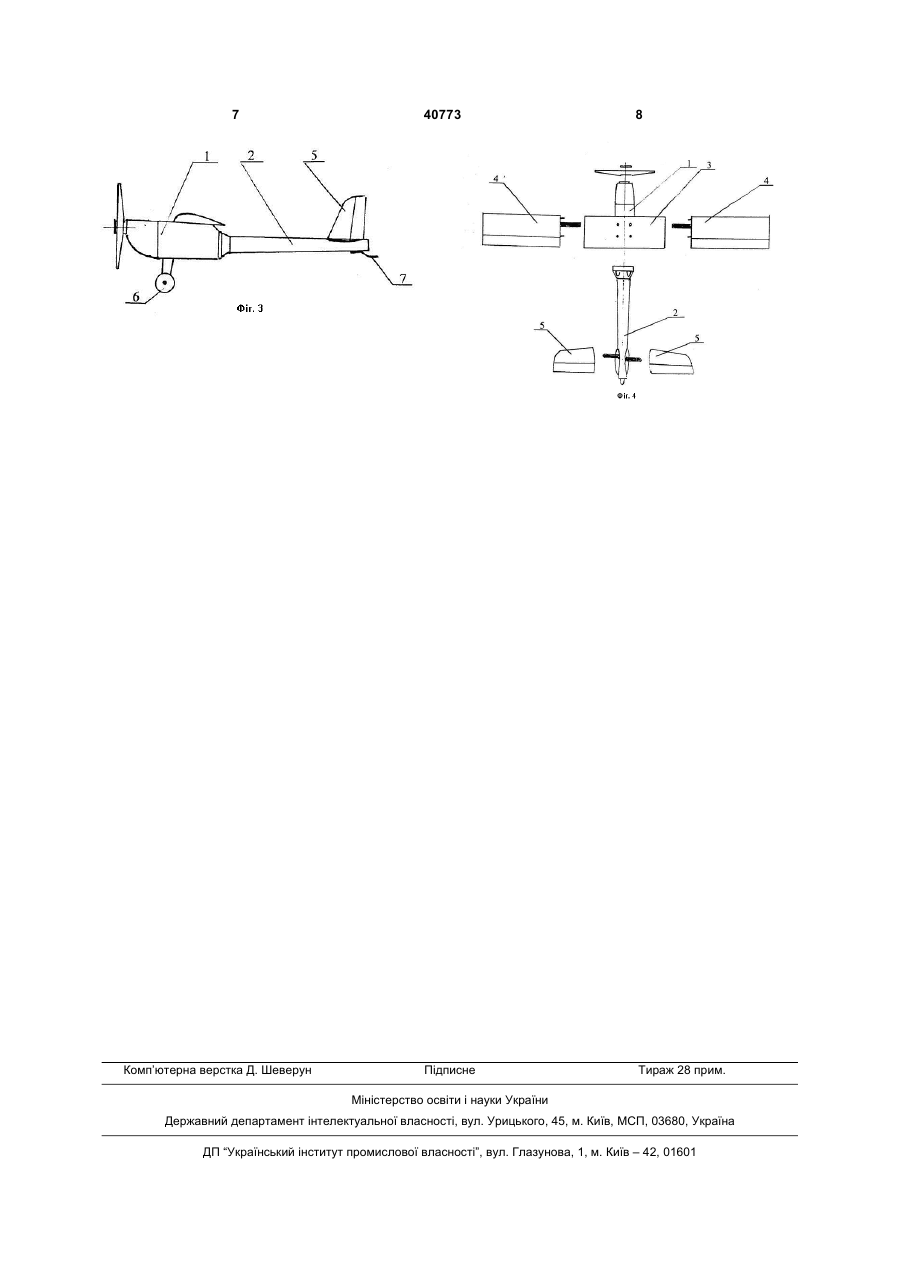
1. Безпілотний літальний апарат, виконаний з можливістю знаходження в двох станах: польотному та транспортування і зберігання, що містить фюзеляж, утворений з носової частини та хвостової балки, крило та хвостове оперення, виконане у вигляді V-подібного стабілізатора, який відрізняється тим, що на носовій частині фюзеляжу встановлено знімне двоколісне шасі, а на хвостовій балці - посадковий костиль, крім того, з метою зручного транспортування і зберігання крило виконане з можливістю розбирання на три секції: дві консолі та центроплан, які в польотному стані з'єднані штирями по лонжерону та фіксовані за допомогою різьбових та контрувальних з'єднань, причому консолі крила виконані зі стрілоподібністю уперед та з рульовими поверхнями на їх задній кромці у вигляді елеронів, хвостове оперення виконане з можливістю розбирання на дві секції, які в польотному стані з'єднані по штирових трубчастих з'єднаннях та фіксовані за допомогою різьбових та контрувальних з'єднань, фюзеляж виконаний з можливістю розбирання на дві секції: носову частину і хвостову балку, які в польотному стані з'єднані по стикувальному фланцевому з'єднанню та U 2 (19) 1 3 ний безпілотний літальний апарат має фюзеляж , крило та хвостове оперення. Фюзеляж апарата виконаний у вигляді носової частини та хвостової балки. Хвостове оперення виконане у вигляді V— подібного стабілізатора. Серед ознак найближчого аналога, що перешкоджають досягненню очікуваного технічного результату від використання пропонованої корисної моделі, є те, що його конструкція дозволяє переходити від стану транспортування і зберігання до положення, що відповідає польотному, шляхом складання деяких аеродинамічних поверхонь літального апарата за допомогою трьохступневих шарнірів та фіксаторів положення, чим досягають тільки зменшення його габаритних розмірів. Конструкція апарату потребує додаткових технічних засобів під час запуску та посадки. Технічною задачею корисної моделі є створення недорогого, у виготовленні і експлуатуванні, придатного до легкого транспортування безпілотного літального апарату середньої ваги з корисним навантаженням у вигляді апаратури для аерозйомки або обладнання для обробки сільськогосподарських угідь для використання в різних умовах, в тому числі і сполучених з ризиком для життя людини, з елементами конструкції, що забезпечують: старт/посадку — ґрунтове покриття на колісне шасі, розбирання та збирання основних елементів конструкції для зручного транспортування і зберігання безпілотного літального апарата та стійку роботу апарату під час польоту за курсом і виконанні маневрів. Поставлена задача вирішується тим, що на носовій частини фюзеляжу літального апарату встановлено зйомне двоколісне шасі, а на хвостовій балці - посадковий костиль. Крило виконане з можливістю розбирання на три секції: дві консолі та центроплан, які в польотному стані з'єднані штирями по лонжерону та фіксовані за допомогою різьбових та контровочних з'єднань. Хвостове оперення виконане з можливістю розбирання на дві секції по штировим трубчастим з'єднанням, що в польотному стані також фіксовані за допомогою різьбових та контровочних з'єднань. Фюзеляж виконаний з можливістю розбирання на дві секцій: носову частину і хвостову балку, які в польотному стані з'єднані по стикувальному фланцевому з'єднанню та фіксовані за допомогою різьбових та контровочних з'єднань, чим забезпечується відокремлення роз'ємних секцій та їх самостійне транспортування і зберігання зі зменшеними габаритними розмірами та вагою, що робить корисну модель безпілотного літального апарату придатною до зручного транспортування та легкої підготовки до польотного стану. Консолі крила виконані зі стріловидністю уперед та з рульовими поверхнями на їх задній кромці у вигляді елеронів , чим забезпечується збільшення стійкості руху апарату під час польоту на малих швидкостях. Фюзеляж, крило і стабілізатор виготовлені із застосуванням методу формовки в матрицю. Для виготовлення складових фюзеляжу використовували склопластик, епоксидну смолу, а для виготовлення складових крила та стабілізатора - склопластик, вуглепластик , епоксидну смолу та конструкційний 40773 4 пінопласт. Усередині корпусу носової частини фюзеляжу розміщені силова установка, паливний бак, система керування і бортове обладнання, призначене для керування від дистанційного пункту та навігації у автономному польоті, та відсік для корисного навантаження, силова установка виконана у вигляді двигуна з вихідним валом та закріпленим на вихідному валу дволопатевим гвинтом. Відсік для корисного навантаження передбачає вміщення апаратури для аерозйомки або обладнання для обробляння сільськогосподарських угідь, чим забезпечується виконання основних робочих функцій запропонованого безпілотного літального апарату. Суть запропонованої корисної моделі пояснюється кресленнями загального вигляду літального апарату: фіг. 1 - вигляд спереду, фіг. 2 -вигляд зверху, фіг. 3 — вигляд збоку, фіг. 4 — вигляд зверху після розбирання, де позначено носову частину 1 та хвостову балку 2 фюзеляжу, центроплан 3 та консолі крила 4, хвостове оперення 5, двохколісного шасі традиційної схеми 6 та посадковий костиль 7. Корисна модель працює наступним чином. Комплект запропонованого літального апарату доставляють до місця старту в заплічних контейнерах або будь-яким транспортом у вигляді придатному до швидкого розгортання і приведення в робочий стан. Для запуску/посадки запропонований безпілотний літальний апарат потребує вільного необладнаного ґрунтового майданчика або частини шляху, без спеціалізованих аеродромних засобів, довжиною близько 100 м. Для здійснення польоту і збирання та розбирання запропонованого БЛА залучають 2-3 людини обслуговуючого персоналу. Збирання корисної моделі до польотного стану відбувається наступним чином. Фюзеляж збирають з двох секцій по стикових фланцевих з'єднаннях. Двоколісне шасі установлюють за традиційною схемою. Крило збирають з трьох секції за допомогою штирів по лонжерону. Центроплан крила закріплюють до фюзеляжу як високоплан. Хвостове оперення збирають з двох секцій штировим трубчастим з'єднанням. Усі роз'ємні елементи конструкції апарата фіксують за допомогою різьбових та контрактовочних з'єднань. Встановлюють корисне навантаження ( до 50 кг), склад якого може варіюватися в залежності від задач, розв'язуваних БЛА. наприклад, стабілізована телевізійна система, цифрова фотокамера, ІЧ-камера або устаткування для розпилювання твердих чи рідких засобів для обробки території. Заправляють паливом ( до 20 кг). Вмикають систему керування. Корисна модель виконує політ у відповідності з логікою, закладеною у системі керування , а запропонована конструкція літального апарата, в разі необхідності, забезпечує можливість посекційної заміни його складових частин. Практичні випробування корисної моделі. При виготовленні конструкційних складових аеродинамічних поверхонь були використані вищезазначені композитні матеріали , що забезпечили високу міцність при відносно малій масі. Основні технічні характеристики виготовленого 5 зразка безпілотного літального апарата: розмах крила - 5,3 м, площа крила - 3 м2 , довжина - 2,8 м , висота 1,05-1,08 м, злітна маса - 85 кг, корисне навантаження - 35 кг, потужність мотору - 25 к.с, діапазон швидкостей - 60-150 км/ч, шасі з двома гумовими надувними колесами. До комплекту БПЛА, окрім самого літального апарата, входили: система автоматичного керування, наземна станція керування та засоби технічного обслуговування. В якості навігаційного обладнання встановили, як "ручне" керування (стаціонарний передавач), так і автономну систему навігації на базі глобальної супутникової навігації (GPS), що дозволяє отриму-ти з високою точністю координати місцевості, а також місцезнаходження та швидкість літака. Перехід з однієї системи керування (ручної) до іншої (автономної) та навпаки відбувався оператором БПЛА в залежності від поточній ситуації та маневрів літака (зліт, посадка, корекція маршруту і т. п.) Випробування корисної моделі проводили у два етапи. Програму першого етапу польоту складали: зліт с землі ( проти вітру); політ по колу навкруг місця старту, посадка на місце зльоту. Політ відбувався при швидкості вітру 5-8 м/с, температурі повітря - 25 °С, атмосферному тиску 735 мм рт. ст.. Апарат був піднятий в повітря та пілотувався пілотом-оператором с землі по каналу радіо керування. На повному газу апарат виконав плавний розгін і зліт. Довжина пробігу складала 25-30 м (по асфальтованій площадці). Після зльоту апарат виконав 5 кіл на висоті 50—80 м над землею, після чого пілотом були зменшені оберти двигуна до режиму посадки, виконано плавний захід на посадку та посадка у зоні зльоту. Час зборки та підготовки апарата до польоту складав біля 1 години. Час польоту складав 5 хвилин. Час згортання до готовності до транспорту 40773 6 вання – 30 хвилин. На всіх режимах польоту відмічені висока стійкість роботи апарату та достатня керованість апаратом. Програму другого етапу польоту складали: зліт с землі ( проти вітру), виконання першого розвороту на кут 180° з виходом у прямий горизонтальний політ, виконання розворотів на кут 180° праворуч та ліворуч з наступним виходом до зони пілотування, , виконання горизонтальної вісімки над центром зони пілотування, а також захід на посадку "як літак" (по коробочці) та посадка на місце зльоту. Політ відбувався за наступних метеорологічних умов: швидкості вітру 6-10 м/с, температурі повітря - 27 °С, атмосферному тиску - 740 мм рт. ст.. Апарат був піднятий в повітря пілотомоператором с землі по каналу радіо керування і виконав в продовж 10 хвилин політ за зазначеною програмою, виявляючи на усіх режимах високі пілотажні властивості. Час зборки та підготовки апарата до польоту складав близько 1 години. Час польоту складав 10 хвилин. Час згортання до готовності до транспортування - близько З0 хвилин. Джерела інформації: 1. Боевые самолеты России. Зуенко Ю.А., Коростылев СЕ. - М.: Элакос, 1994. - 192 с. 2. В. Владимиров. Структура "дивизии XXI века" США. // Зарубежное военное обозрение. 2005, №7. 3. Каримов А.Х. Беспилотные самолеты : максимум возможностей. // Наука и жизнь. - М., 2008, №4. 4. Бауэре П. Летательные аппараты нетрадиционных схем. — М : Мир, 1991. - 320 с. 5. Пат. RU 2334651 С1, МІЖ7 В 64 С 1/30, В 64 С 3/56. Малоразмерный беспилотный летательный аппарат (варианты), заявл. 2006.12.26, опубл. 2008.09.27. 7 Комп’ютерна верстка Д. Шеверун 40773 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUnmanned aircraft
Автори англійськоюPopov Mykola Mykhailovych, Malko Ihor Ivanovych
Назва патенту російськоюБеспилотный летательный аппарат
Автори російськоюПопов Николай Михайлович, Малько Игорь Иванович
МПК / Мітки
МПК: B64C 1/30, B64C 5/00, B64C 1/26, B64C 3/56
Мітки: апарат, літальний, безпілотний
Код посилання
<a href="https://ua.patents.su/4-40773-bezpilotnijj-litalnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Безпілотний літальний апарат</a>
Ударний дистанційно керований безпілотний літальний апарат
Номер патенту: 31234
Опубліковано: 25.03.2008
Автори: Машталір Вадим Віталійович, Мельник Олександр Дмитрович, Асланян Альберт Едуардович, Чучмій Андрій Володимирович, Сила Ігор Михайлович, Загороднюк Юрій Григорович, Лук'янов Павло Олександрович, Василенко Олександр Васильович, Растригін Олександр Олексійович, Комаров Володимир Олександрович, Гордієвський Олексій Тихонович, Тішков Сергій Юрійович, Чіпіжко Юрій Анатолійович, Борохвостов Ігор Валерійович, Лапицький Сергій Володимирович
МПК: H04B 7/185, B64C 30/00
Мітки: керований, безпілотний, літальний, ударний, дистанційно, апарат
Формула / Реферат:
1. Ударний дистанційно керований безпілотний літальний апарат, який містить фюзеляж, крило та хвостове оперення з органами керування, розміщені на фюзеляжі, один, два чи більше двигунів, пристрій для зльоту/посадки, вузли кріплення засобів ураження, закріплені на крилі і/чи на фюзеляжі, системи забезпечення та функціонування літального апарата, систему керування та наведення літального апарата на ціль, засоби ураження, розміщені на зазначених...
Одномоторний безпілотний літальний апарат для захисту рослин
Номер патенту: 34952
Опубліковано: 26.08.2008
Автори: Матійчик Михайло Петрович, Рибальченко Олександр Сергійович
МПК: B64C 39/02
Мітки: апарат, рослин, одномоторний, безпілотний, захисту, літальний
Формула / Реферат:
Одномоторний безпілотний літальний апарат для захисту рослин, що складається з носової гондоли, хвостової балки, трапецієподібного крила без стрілоподібності, хрестоподібного хвостового оперення, шасі, силової установки на пілоні та начіпних робочих органів, який відрізняється тим, що крило виконане стрілоподібним та прямокутним у плані, носова гондола та хвостова балка виконані у вигляді єдиного фюзеляжу, силова установка встановлена...
Безпілотний літальний апарат “моноліт”

Номер патенту: 17324
Опубліковано: 15.09.2006
Автори: Кудрін Анатолій Павлович, Лещенко Юрій Терентійович
МПК: B64C 29/00
Мітки: апарат, безпілотний, моноліт, літальний
Формула / Реферат:
1. Безпілотний літальний апарат, що містить корпус круглої замкнутої форми, вмонтований у корпус привід з горизонтальним пропелером, з нижнім повітровипускним і верхнім повітрозабірним отворами, який відрізняється тим, що корпус виконаний порожнистим у формі кільцевого крила і у перерізі має профіль крила, а усередині корпусу встановлені щонайменше дві спрямовуючі площини, біля кожної з яких встановлений дефлектор з можливістю повороту...
Літальний апарат

Номер патенту: 58564
Опубліковано: 15.08.2003
Автор: Азар'єв Ігор Олександрович
Формула / Реферат:
Літальний апарат, який містить фюзеляж, шасі, оперення та крила з керуючими поверхнями, а також привід керуючих поверхонь, який відрізняється тим, що крила встановлені вільно на осях, закріплених на фюзеляжі в режимі флюгерування.
Літальний апарат
Номер патенту: 64235
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
МПК: B64C 3/10, B64C 39/00
Формула / Реферат:
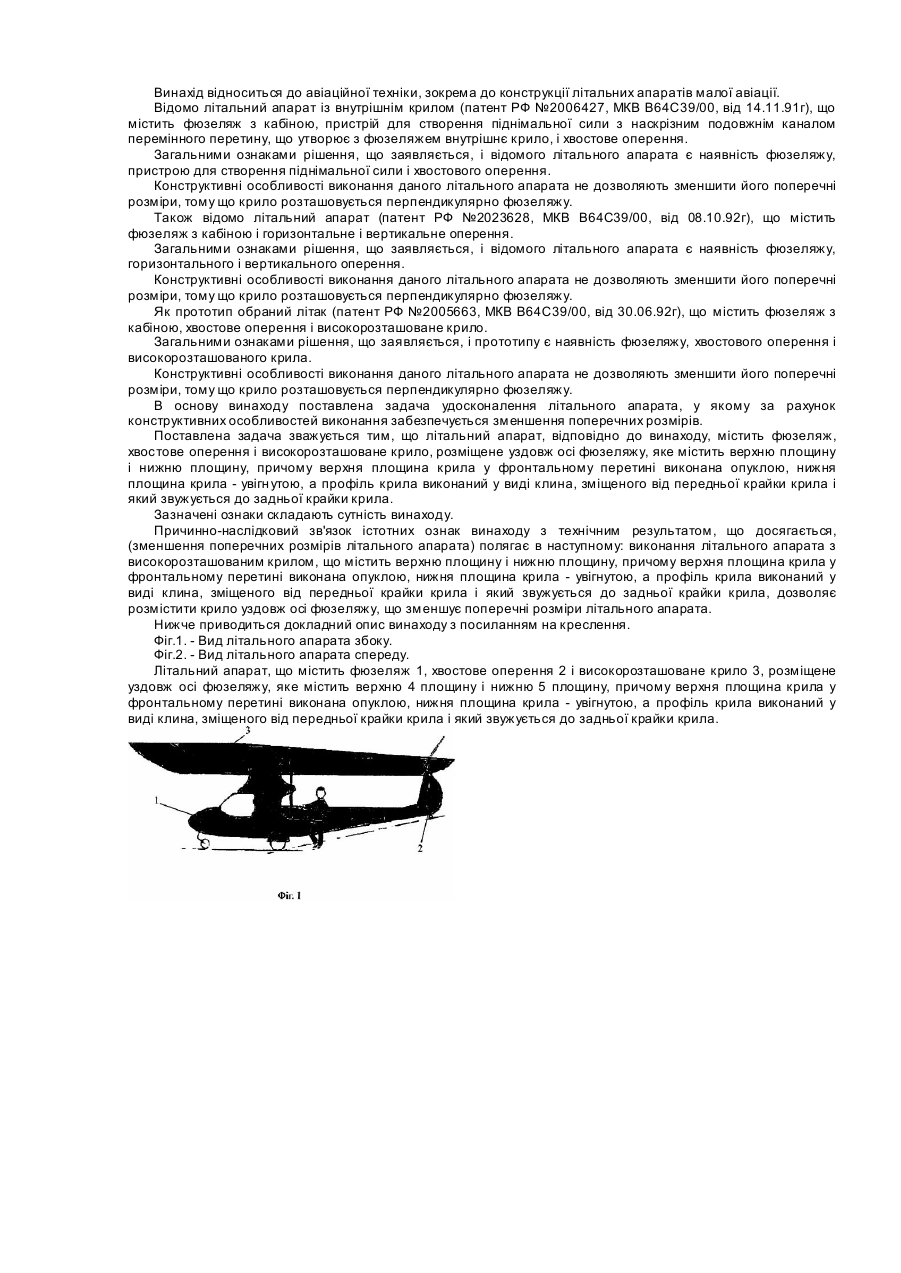
Літальний апарат, що містить фюзеляж, хвостове оперення і високорозташоване крило, який відрізняється тим, що крило розміщене уздовж подовжньої осі фюзеляжу, виконане як жолоб, верхня площина якого у фронтальному перерізі виконана опуклою, нижня - увігнутою, а профіль крила виконаний як клин, що зміщений від передньої крайки крила і звужується до задньої крайки крила.
Попередній патент: Джерело електроживлення для трифазного навантаження, обладнаного нейтральним виводом
Наступний патент: Східчаста колона
Випадковий патент: Спосіб маркування самоклеючої стрічки для підвищення зручності користуванням