Вібраційний живильник
Номер патенту: 42119
Опубліковано: 25.06.2009
Автори: Мироненко Володимир Іванович, Бальвас Іван Михайлович
Формула / Реферат
1. Вібраційний живильник, що містить в собі опору, встановлений на опорі торсіон із закріпленими на ньому важелями, закріплені на опорі та на торсіоні елементи електромагнітного вібратора, розміщений над опорою та зв'язаний з важелями торсіона за допомогою ресор робочий орган, який відрізняється тим, що робочий орган додатково зв'язаний з опорою за допомогою вертикальних стійок із гумово-металевими шарнірами, котушки електромагнітного вібратора встановлені з боків торсіона з можливістю по черзі взаємодіяти із закріпленим на торсіоні якорем вібратора, а з боків опори розміщені балансувальні противаги.
2. Вібраційний живильник за п. 1, який відрізняється тим, що центр ваги коливальної системи розміщений в горизонтальній площині, яка проходить через поздовжні осі симетрії ресор, що з'єднують робочий орган з важелями торсіона, а осі обертання верхніх гумово-металевих шарнірів вертикальних стійок, що прикріплені до робочого органу, розташовані в цій же площині.
3. Вібраційний живильник за п. 1, який відрізняється тим, що нижні гумово-металеві шарніри вертикальних стійок розміщені в горизонтальних пазах опори з можливістю зміни місця свого кріплення.
4. Вібраційний живильник за п. 1, який відрізняється тим, що відстань "вісь обертання торсіона - вісь обертання верхніх гумово-металевих шарнірів вертикальних стійок" і відстань "вісь обертання торсіона - поздовжня вісь якоря вібратора" знаходяться у співвідношенні (2,5-3,0):1.
Текст
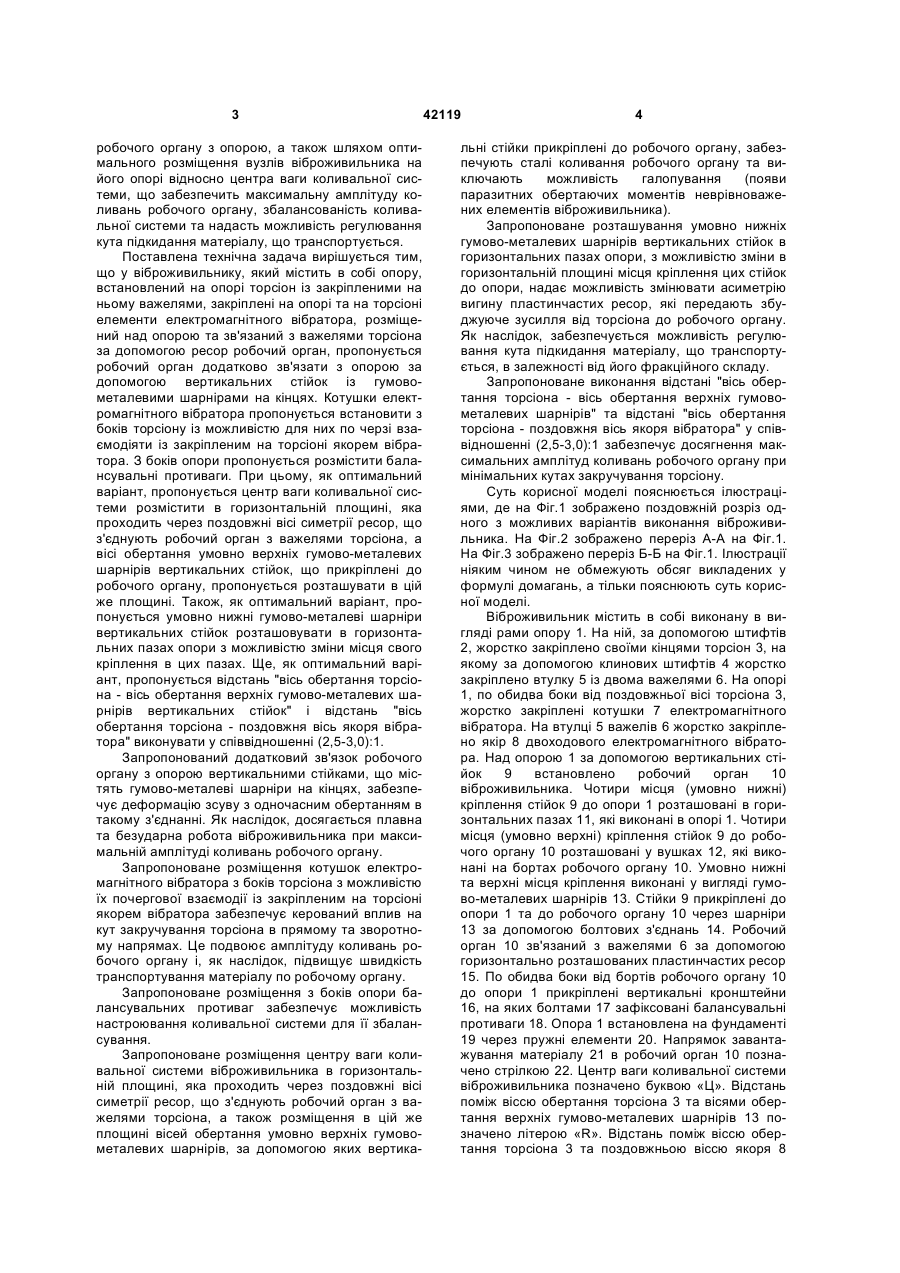
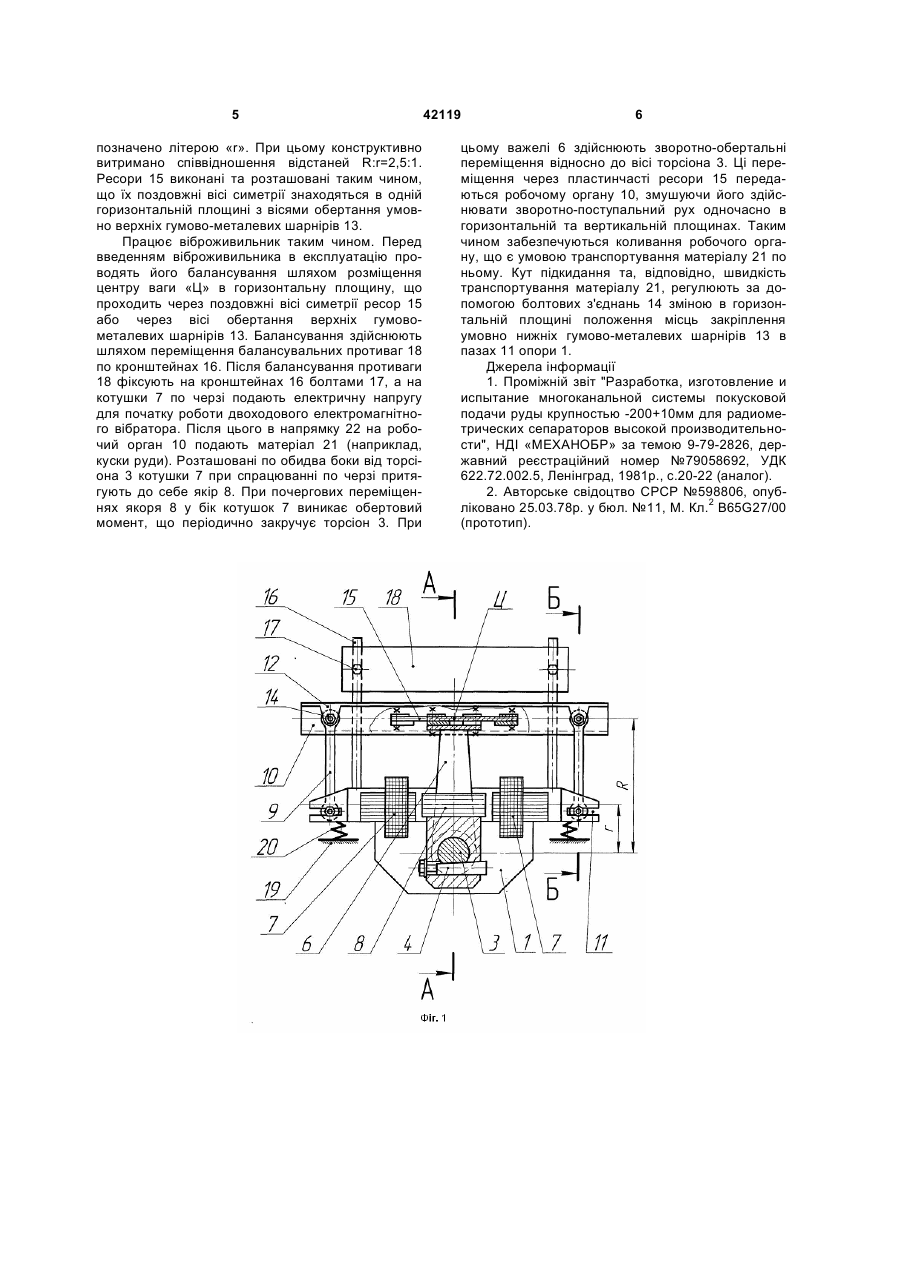
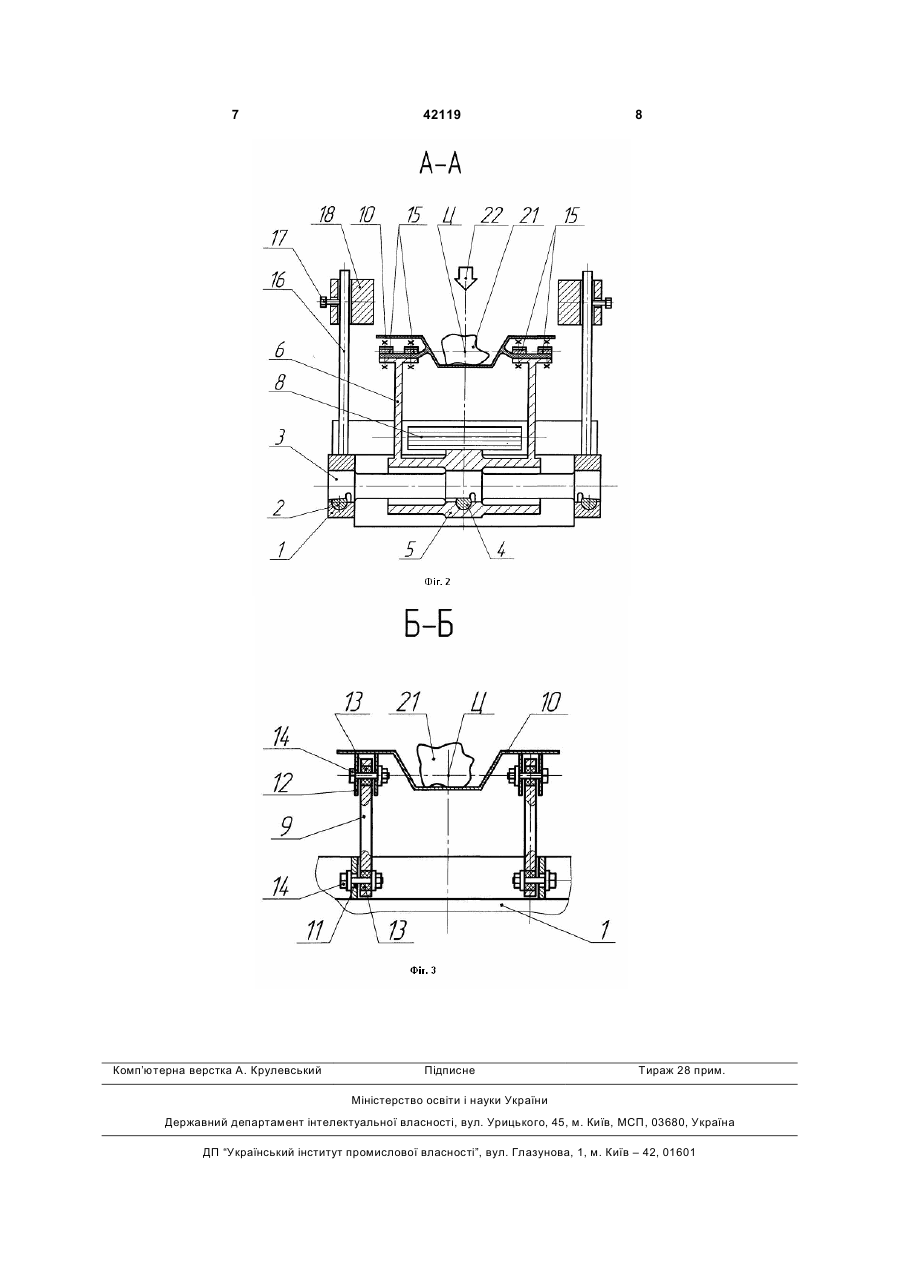
1. Вібраційний живильник, що містить в собі опору, встановлений на опорі торсіон із закріпленими на ньому важелями, закріплені на опорі та на торсіоні елементи електромагнітного вібратора, розміщений над опорою та зв'язаний з важелями торсіона за допомогою ресор робочий орган, який відрізняється тим, що робочий орган додатково зв'язаний з опорою за допомогою вертикальних стійок із гумово-металевими шарнірами, котушки електромагнітного вібратора встановлені з боків торсіона з можливістю по черзі взаємодіяти із закріпленим на торсіоні якорем вібратора, а з боків 3 робочого органу з опорою, а також шляхом оптимального розміщення вузлів віброживильника на його опорі відносно центра ваги коливальної системи, що забезпечить максимальну амплітуду коливань робочого органу, збалансованість коливальної системи та надасть можливість регулювання кута підкидання матеріалу, що транспортується. Поставлена технічна задача вирішується тим, що у віброживильнику, який містить в собі опору, встановлений на опорі торсіон із закріпленими на ньому важелями, закріплені на опорі та на торсіоні елементи електромагнітного вібратора, розміщений над опорою та зв'язаний з важелями торсіона за допомогою ресор робочий орган, пропонується робочий орган додатково зв'язати з опорою за допомогою вертикальних стійок із гумовометалевими шарнірами на кінцях. Котушки електромагнітного вібратора пропонується встановити з боків торсіону із можливістю для них по черзі взаємодіяти із закріпленим на торсіоні якорем вібратора. З боків опори пропонується розмістити балансувальні противаги. При цьому, як оптимальний варіант, пропонується центр ваги коливальної системи розмістити в горизонтальній площині, яка проходить через поздовжні вісі симетрії ресор, що з'єднують робочий орган з важелями торсіона, а вісі обертання умовно верхніх гумово-металевих шарнірів вертикальних стійок, що прикріплені до робочого органу, пропонується розташувати в цій же площині. Також, як оптимальний варіант, пропонується умовно нижні гумово-металеві шарніри вертикальних стійок розташовувати в горизонтальних пазах опори з можливістю зміни місця свого кріплення в цих пазах. Ще, як оптимальний варіант, пропонується відстань "вісь обертання торсіона - вісь обертання верхніх гумово-металевих шарнірів вертикальних стійок" і відстань "вісь обертання торсіона - поздовжня вісь якоря вібратора" виконувати у співвідношенні (2,5-3,0):1. Запропонований додатковий зв'язок робочого органу з опорою вертикальними стійками, що містять гумово-металеві шарніри на кінцях, забезпечує деформацію зсуву з одночасним обертанням в такому з'єднанні. Як наслідок, досягається плавна та безударна робота віброживильника при максимальній амплітуді коливань робочого органу. Запропоноване розміщення котушок електромагнітного вібратора з боків торсіона з можливістю їх почергової взаємодії із закріпленим на торсіоні якорем вібратора забезпечує керований вплив на кут закручування торсіона в прямому та зворотному напрямах. Це подвоює амплітуду коливань робочого органу і, як наслідок, підвищує швидкість транспортування матеріалу по робочому органу. Запропоноване розміщення з боків опори балансувальних противаг забезпечує можливість настроювання коливальної системи для її збалансування. Запропоноване розміщення центру ваги коливальної системи віброживильника в горизонтальній площині, яка проходить через поздовжні вісі симетрії ресор, що з'єднують робочий орган з важелями торсіона, а також розміщення в цій же площині вісей обертання умовно верхніх гумовометалевих шарнірів, за допомогою яких вертика 42119 4 льні стійки прикріплені до робочого органу, забезпечують сталі коливання робочого органу та виключають можливість галопування (появи паразитних обертаючих моментів неврівноважених елементів віброживильника). Запропоноване розташування умовно нижніх гумово-металевих шарнірів вертикальних стійок в горизонтальних пазах опори, з можливістю зміни в горизонтальній площині місця кріплення цих стійок до опори, надає можливість змінювати асиметрію вигину пластинчастих ресор, які передають збуджуюче зусилля від торсіона до робочого органу. Як наслідок, забезпечується можливість регулювання кута підкидання матеріалу, що транспортується, в залежності від його фракційного складу. Запропоноване виконання відстані "вісь обертання торсіона - вісь обертання верхніх гумовометалевих шарнірів" та відстані "вісь обертання торсіона - поздовжня вісь якоря вібратора" у співвідношенні (2,5-3,0):1 забезпечує досягнення максимальних амплітуд коливань робочого органу при мінімальних кутах закручування торсіону. Суть корисної моделі пояснюється ілюстраціями, де на Фіг.1 зображено поздовжній розріз одного з можливих варіантів виконання віброживильника. На Фіг.2 зображено переріз А-А на Фіг.1. На Фіг.3 зображено переріз Б-Б на Фіг.1. Ілюстрації ніяким чином не обмежують обсяг викладених у формулі домагань, а тільки пояснюють суть корисної моделі. Віброживильник містить в собі виконану в вигляді рами опору 1. На ній, за допомогою штифтів 2, жорстко закріплено своїми кінцями торсіон 3, на якому за допомогою клинових штифтів 4 жорстко закріплено втулку 5 із двома важелями 6. На опорі 1, по обидва боки від поздовжньої вісі торсіона 3, жорстко закріплені котушки 7 електромагнітного вібратора. На втулці 5 важелів 6 жорстко закріплено якір 8 двоходового електромагнітного вібратора. Над опорою 1 за допомогою вертикальних стійок 9 встановлено робочий орган 10 віброживильника. Чотири місця (умовно нижні) кріплення стійок 9 до опори 1 розташовані в горизонтальних пазах 11, які виконані в опорі 1. Чотири місця (умовно верхні) кріплення стійок 9 до робочого органу 10 розташовані у вушках 12, які виконані на бортах робочого органу 10. Умовно нижні та верхні місця кріплення виконані у вигляді гумово-металевих шарнірів 13. Стійки 9 прикріплені до опори 1 та до робочого органу 10 через шарніри 13 за допомогою болтових з'єднань 14. Робочий орган 10 зв'язаний з важелями 6 за допомогою горизонтально розташованих пластинчастих ресор 15. По обидва боки від бортів робочого органу 10 до опори 1 прикріплені вертикальні кронштейни 16, на яких болтами 17 зафіксовані балансувальні противаги 18. Опора 1 встановлена на фундаменті 19 через пружні елементи 20. Напрямок завантажування матеріалу 21 в робочий орган 10 позначено стрілкою 22. Центр ваги коливальної системи віброживильника позначено буквою «Ц». Відстань поміж віссю обертання торсіона 3 та вісями обертання верхніх гумово-металевих шарнірів 13 позначено літерою «R». Відстань поміж віссю обертання торсіона 3 та поздовжньою віссю якоря 8 5 позначено літерою «r». При цьому конструктивно витримано співвідношення відстаней R:r=2,5:1. Ресори 15 виконані та розташовані таким чином, що їх поздовжні вісі симетрії знаходяться в одній горизонтальній площині з вісями обертання умовно верхніх гумово-металевих шарнірів 13. Працює віброживильник таким чином. Перед введенням віброживильника в експлуатацію проводять його балансування шляхом розміщення центру ваги «Ц» в горизонтальну площину, що проходить через поздовжні вісі симетрії ресор 15 або через вісі обертання верхніх гумовометалевих шарнірів 13. Балансування здійснюють шляхом переміщення балансувальних противаг 18 по кронштейнах 16. Після балансування противаги 18 фіксують на кронштейнах 16 болтами 17, а на котушки 7 по черзі подають електричну напругу для початку роботи двоходового електромагнітного вібратора. Після цього в напрямку 22 на робочий орган 10 подають матеріал 21 (наприклад, куски руди). Розташовані по обидва боки від торсіона 3 котушки 7 при спрацюванні по черзі притягують до себе якір 8. При почергових переміщеннях якоря 8 у бік котушок 7 виникає обертовий момент, що періодично закручує торсіон 3. При 42119 6 цьому важелі 6 здійснюють зворотно-обертальні переміщення відносно до вісі торсіона 3. Ці переміщення через пластинчасті ресори 15 передаються робочому органу 10, змушуючи його здійснювати зворотно-поступальний рух одночасно в горизонтальній та вертикальній площинах. Таким чином забезпечуються коливання робочого органу, що є умовою транспортування матеріалу 21 по ньому. Кут підкидання та, відповідно, швидкість транспортування матеріалу 21, регулюють за допомогою болтових з'єднань 14 зміною в горизонтальній площині положення місць закріплення умовно нижніх гумово-металевих шарнірів 13 в пазах 11 опори 1. Джерела інформації 1. Проміжній звіт "Разработка, изготовление и испытание многоканальной системы покусковой подачи руды крупностью -200+10мм для радиометрических сепараторов высокой производительности", НДІ «МЕХАНОБР» за темою 9-79-2826, державний реєстраційний номер №79058692, УДК 622.72.002.5, Ленінград, 1981р., с.20-22 (аналог). 2. Авторське свідоцтво СРСР №598806, опубліковано 25.03.78р. у бюл. №11, М. Кл.2 B65G27/00 (прототип). 7 Комп’ютерна верстка А. Крулевський 42119 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVibration feeder
Автори англійськоюBalvas Ivan Mykhailovych, Myronenko Volodymyr Ivanovych
Назва патенту російськоюВибрационный питатель
Автори російськоюБальвас Иван Михайлович, Мироненко Владимир Иванович
МПК / Мітки
МПК: B65G 27/10
Мітки: живильник, вібраційний
Код посилання
<a href="https://ua.patents.su/4-42119-vibracijjnijj-zhivilnik.html" target="_blank" rel="follow" title="База патентів України">Вібраційний живильник</a>
Вібраційний живильник
Номер патенту: 26004
Опубліковано: 27.08.2007
Автори: Бальвас Іван Михайлович, Іванов Микола Миколайович
МПК: B07B 1/00
Мітки: живильник, вібраційний
Формула / Реферат:
Вібраційний живильник, що містить нерухому основу, робочий орган з віброзбудником, розташовані між нерухомою основою та робочим органом порожнисті пружні віброопори, який відрізняється тим, що порожнисті пружні віброопори виконано у формі двох пар з'єднаних своїми основами та зрізаних по висоті еліптичних параболоїдів, які утворюють у своєму поздовжньому перерізі стінку віброопори товщиною, що зменшується у напрямку від середини віброопори до...
Живильник вібраційний
Номер патенту: 31253
Опубліковано: 25.03.2008
Автори: Гурін Вячеслав Олександрович, Нескоромний Євген Миколайович, Ботанцев Ігор Вікторович
МПК: B03C 1/00
Мітки: живильник, вібраційний
Формула / Реферат:
1. Вібраційний живильник, що містить лоток із транспортуючою поверхнею, встановлений на пружних опорах і з'єднаний з вібраційним приводом, який відрізняється тим, що поверхня транспортувального лотка нахилена відносно горизонтальної площини під кутом 15-25°, а вібраційний привід встановлений на консолі і оснащений дебалансами, при цьому консоль закріплена до лотка і взаємодіє з пружною опорою, а вісь консолі розташована під кутом 15-25°...
Вібраційний викопуючий робочий орган

Номер патенту: 84977
Опубліковано: 10.12.2008
Автори: Головач Іван Володимирович, Булгаков Володимир Михайлович
МПК: A01D 25/04
Мітки: викопуючий, вібраційний, орган, робочий
Формула / Реферат:
Вібраційний викопуючий робочий орган, який містить раму, на якій за допомогою шарнірів і стійок встановлені лемеші, кінематично зв'язані з приводом їх у коливальний рух у повздовжньо-вертикальній площині, який відрізняється тим, що кожний леміш встановлений на стійці за допомогою циліндричних шарнірів, що мають осі, які розташовані у напрямку руху, при цьому кожна верхня частина кожного лемеша зв'язана з бічною частиною стійки за допомогою...
Вібраційний коток
Номер патенту: 40869
Опубліковано: 27.04.2009
Автори: Євсєєв Всеволод Олегович, Несевря Павло Іванович, Шатов Сергій Васильович
МПК: E01C 19/22
Мітки: вібраційний, коток
Формула / Реферат:
Вібраційний коток, що містить базовий трактор, раму з віброзбуджувачем, робочий орган, який відрізняється тим, що на рамі встановлені додаткові опори кочення з гідроприводом, а кріплення робочого органу виконано з можливістю його заміни.
Вібраційний викопуючий робочий орган
Номер патенту: 76557
Опубліковано: 15.08.2006
Автор: Булгаков Володимир Михайлович
МПК: A01D 25/04
Мітки: викопуючий, орган, вібраційний, робочий
Формула / Реферат:
Вібраційний викопуючий робочий орган, який містить два викопуючі лемеші, що закріплені на кінцях стійок, встановлених рухомо на рамі, привід, який відрізняється тим, що додатково на рамі встановлені два віброприводи для кожного з лемешів, які створюють для лемешів різні фази та амплітуди коливальних рухів.
Попередній патент: Спосіб фіксації вмісту шлунково-кишкового тракту риб
Наступний патент: Поліуретан як плівковий та конструкційний матеріал
Випадковий патент: Спосіб здійснення персонального сеансу зв'язку між користувачем мережі передачі даних і користувачем телефонної мережі (варіанти)