Інструментальний маніпулятор
Номер патенту: 43879
Опубліковано: 10.09.2009
Автори: Залевський Костянтин Едуардович, Дзержинський Віталій Олександрович, Маринов Дмитро Всеволодович, Волошин Олексій Іванович, Удовенко Сергій Олександрович
Формула / Реферат
Інструментальний маніпулятор, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і механізм обертання поворотної обойми, який відрізняється тим, що поворотна обойма виконана з упорами, розміщеними по колу на нижній площині поворотної обойми, при цьому вертикальна вісь кожного упора розміщена в площині переміщення інструментальної штанги, а їх кількість дорівнює кількості інструментальних штанг, а механізм обертання поворотної обойми виконано у вигляді двох гідроциліндрів із спільним штоком з рамкою і каретки, встановленої з можливістю обертання на корпусі циліндра механізму підйому інструменту і оснащеної кронштейнами з підпружиненими упорами, що взаємодіють з вищезазначеними упорами поворотної обойми із забезпеченням вільного обертання обойми в один бік, наприклад за годинниковою стрілкою, і поворотним важелем з роликом, взаємодіючим з рамкою штока гідроциліндрів механізму обертання поворотної обойми.
Текст
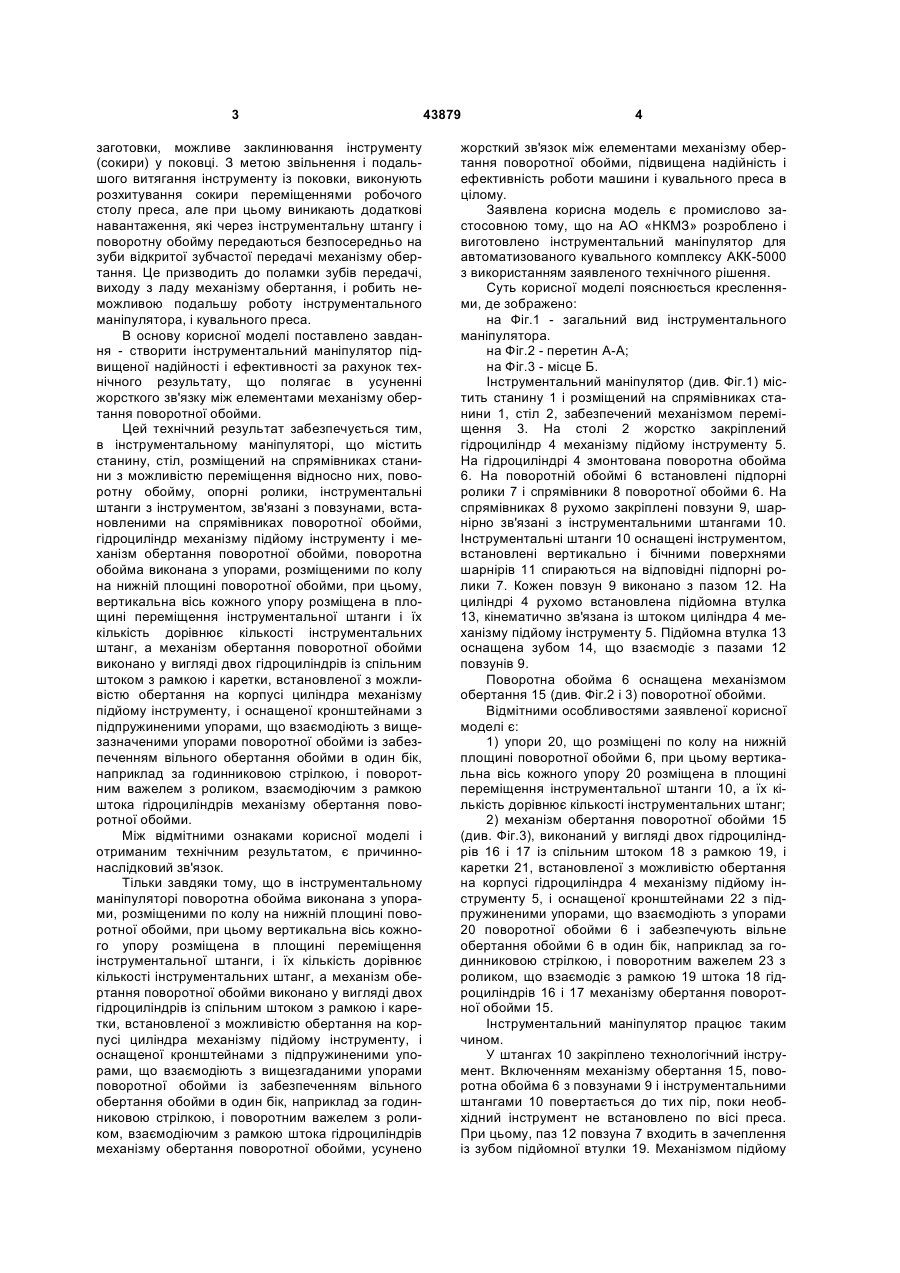
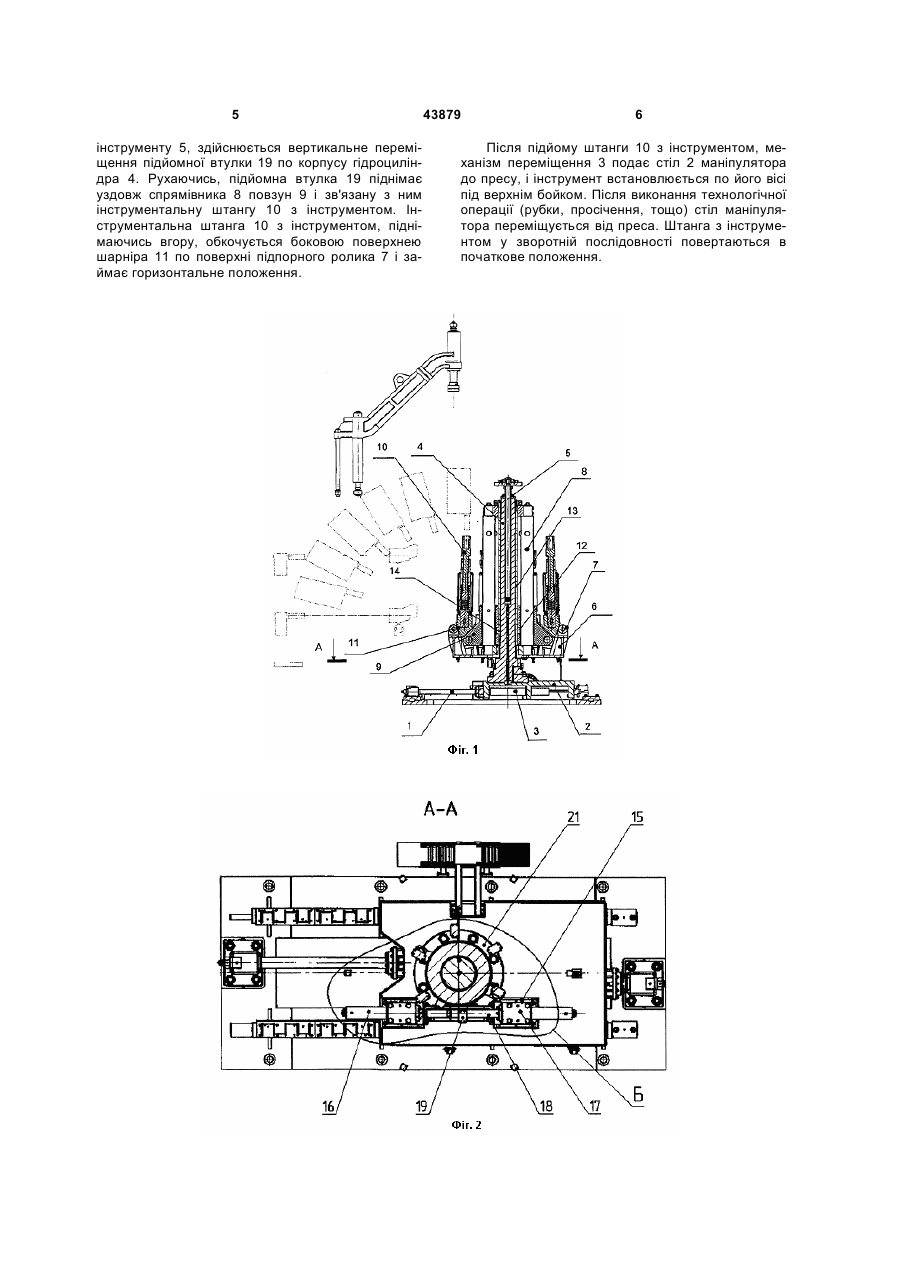
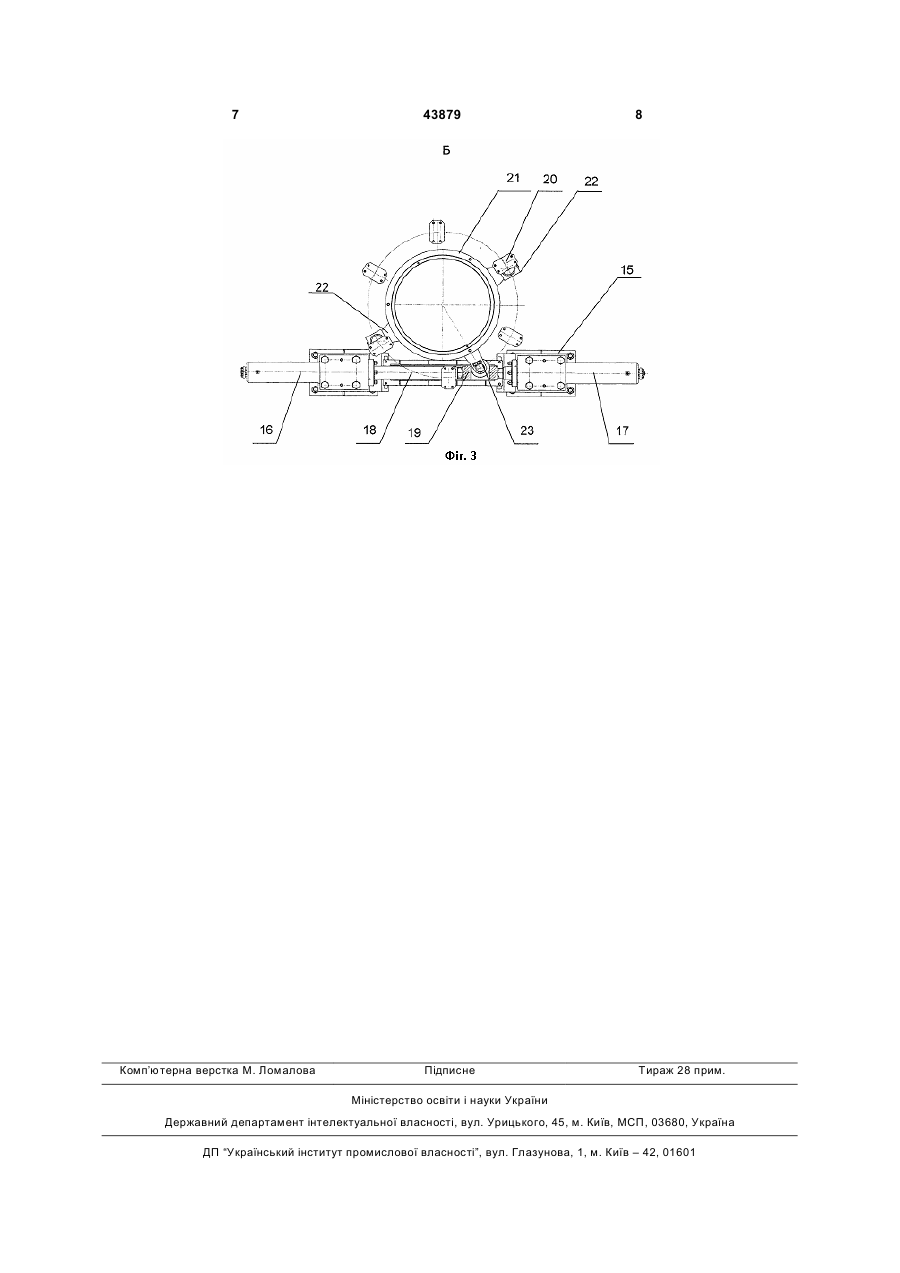
Інструментальний маніпулятор, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і ме 3 заготовки, можливе заклинювання інструменту (сокири) у поковці. З метою звільнення і подальшого витягання інструменту із поковки, виконують розхитування сокири переміщеннями робочого столу преса, але при цьому виникають додаткові навантаження, які через інструментальну штангу і поворотну обойму передаються безпосередньо на зуби відкритої зубчастої передачі механізму обертання. Це призводить до поламки зубів передачі, виходу з ладу механізму обертання, і робить неможливою подальшу роботу інструментального маніпулятора, і кувального преса. В основу корисної моделі поставлено завдання - створити інструментальний маніпулятор підвищеної надійності і ефективності за рахунок технічного результату, що полягає в усуненні жорсткого зв'язку між елементами механізму обертання поворотної обойми. Цей технічний результат забезпечується тим, в інструментальному маніпуляторі, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і механізм обертання поворотної обойми, поворотна обойма виконана з упорами, розміщеними по колу на нижній площині поворотної обойми, при цьому, вертикальна вісь кожного упору розміщена в площині переміщення інструментальної штанги і їх кількість дорівнює кількості інструментальних штанг, а механізм обертання поворотної обойми виконано у вигляді двох гідроциліндрів із спільним штоком з рамкою і каретки, встановленої з можливістю обертання на корпусі циліндра механізму підйому інструменту, і оснащеної кронштейнами з підпружиненими упорами, що взаємодіють з вищезазначеними упорами поворотної обойми із забезпеченням вільного обертання обойми в один бік, наприклад за годинниковою стрілкою, і поворотним важелем з роликом, взаємодіючим з рамкою штока гідроциліндрів механізму обертання поворотної обойми. Між відмітними ознаками корисної моделі і отриманим технічним результатом, є причиннонаслідковий зв'язок. Тільки завдяки тому, що в інструментальному маніпуляторі поворотна обойма виконана з упорами, розміщеними по колу на нижній площині поворотної обойми, при цьому вертикальна вісь кожного упору розміщена в площині переміщення інструментальної штанги, і їх кількість дорівнює кількості інструментальних штанг, а механізм обертання поворотної обойми виконано у вигляді двох гідроциліндрів із спільним штоком з рамкою і каретки, встановленої з можливістю обертання на корпусі циліндра механізму підйому інструменту, і оснащеної кронштейнами з підпружиненими упорами, що взаємодіють з вищезгаданими упорами поворотної обойми із забезпеченням вільного обертання обойми в один бік, наприклад за годинниковою стрілкою, і поворотним важелем з роликом, взаємодіючим з рамкою штока гідроциліндрів механізму обертання поворотної обойми, усунено 43879 4 жорсткий зв'язок між елементами механізму обертання поворотної обойми, підвищена надійність і ефективність роботи машини і кувального преса в цілому. Заявлена корисна модель є промислово застосовною тому, що на АО «НКМЗ» розроблено і виготовлено інструментальний маніпулятор для автоматизованого кувального комплексу АКК-5000 з використанням заявленого технічного рішення. Суть корисної моделі пояснюється кресленнями, де зображено: на Фіг.1 - загальний вид інструментального маніпулятора. на Фіг.2 - перетин А-А; на Фіг.3 - місце Б. Інструментальний маніпулятор (див. Фіг.1) містить станину 1 і розміщений на спрямівниках станини 1, стіл 2, забезпечений механізмом переміщення 3. На столі 2 жорстко закріплений гідроциліндр 4 механізму підйому інструменту 5. На гідроциліндрі 4 змонтована поворотна обойма 6. На поворотній обоймі 6 встановлені підпорні ролики 7 і спрямівники 8 поворотної обойми 6. На спрямівниках 8 рухомо закріплені повзуни 9, шарнірно зв'язані з інструментальними штангами 10. Інструментальні штанги 10 оснащені інструментом, встановлені вертикально і бічними поверхнями шарнірів 11 спираються на відповідні підпорні ролики 7. Кожен повзун 9 виконано з пазом 12. На циліндрі 4 рухомо встановлена підйомна втулка 13, кінематично зв'язана із штоком циліндра 4 механізму підйому інструменту 5. Підйомна втулка 13 оснащена зубом 14, що взаємодіє з пазами 12 повзунів 9. Поворотна обойма 6 оснащена механізмом обертання 15 (див. Фіг.2 і 3) поворотної обойми. Відмітними особливостями заявленої корисної моделі є: 1) упори 20, що розміщені по колу на нижній площині поворотної обойми 6, при цьому вертикальна вісь кожного упору 20 розміщена в площині переміщення інструментальної штанги 10, а їх кількість дорівнює кількості інструментальних штанг; 2) механізм обертання поворотної обойми 15 (див. Фіг.3), виконаний у вигляді двох гідроциліндрів 16 і 17 із спільним штоком 18 з рамкою 19, і каретки 21, встановленої з можливістю обертання на корпусі гідроциліндра 4 механізму підйому інструменту 5, і оснащеної кронштейнами 22 з підпружиненими упорами, що взаємодіють з упорами 20 поворотної обойми 6 і забезпечують вільне обертання обойми 6 в один бік, наприклад за годинниковою стрілкою, і поворотним важелем 23 з роликом, що взаємодіє з рамкою 19 штока 18 гідроциліндрів 16 і 17 механізму обертання поворотної обойми 15. Інструментальний маніпулятор працює таким чином. У штангах 10 закріплено технологічний інструмент. Включенням механізму обертання 15, поворотна обойма 6 з повзунами 9 і інструментальними штангами 10 повертається до тих пір, поки необхідний інструмент не встановлено по вісі преса. При цьому, паз 12 повзуна 7 входить в зачеплення із зубом підйомної втулки 19. Механізмом підйому 5 інструменту 5, здійснюється вертикальне переміщення підйомної втулки 19 по корпусу гідроциліндра 4. Рухаючись, підйомна втулка 19 піднімає уздовж спрямівника 8 повзун 9 і зв'язану з ним інструментальну штангу 10 з інструментом. Інструментальна штанга 10 з інструментом, піднімаючись вгору, обкочується боковою поверхнею шарніра 11 по поверхні підпорного ролика 7 і займає горизонтальне положення. 43879 6 Після підйому штанги 10 з інструментом, механізм переміщення 3 подає стіл 2 маніпулятора до пресу, і інструмент встановлюється по його вісі під верхнім бойком. Після виконання технологічної операції (рубки, просічення, тощо) стіл маніпулятора переміщується від преса. Штанга з інструментом у зворотній послідовності повертаються в початкове положення. 7 Комп’ютерна верстка М. Ломалова 43879 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTool manipulator
Автори англійськоюVoloshyn Oleksii Ivanovych, Dzerzhynskyi Vitalii Oleksandrovych, Zalevskyi Kostiantyn Eduardovych, Marynov Dmytro Vsevolodovych, Udovenko Serhii Oleksandrovych
Назва патенту російськоюИнструментальный манипулятор
Автори російськоюВолошин Алексей Иванович, Дзержинский Виталий Александрович, Залевский Константин Эдуардович, Маринов Дмитрий Всеволодович, Удовенко Сергей Александрович
МПК / Мітки
МПК: B21J 13/00
Мітки: маніпулятор, інструментальний
Код посилання
<a href="https://ua.patents.su/4-43879-instrumentalnijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Інструментальний маніпулятор</a>
Маніпулятор до преса
Номер патенту: 15127
Опубліковано: 15.06.2006
Автори: Василенко Микола Іванович, Тарадай Вадим Валентинович, Назаренко Юрій Михайлович, Голик Василь Якович, Колозін Володимир Іванович, Волошин Олексій Іванович
МПК: B21J 13/00
Мітки: преса, маніпулятор
Формула / Реферат:
1. Маніпулятор до преса, який містить основу, виконану у вигляді з'єднаних поперечними балками бортовин, встановлених на ходових візках, а також хобот з захватом і силові ланки, пов'язані з рамою цього хобота, який відрізняється тим, що він оснащений додатковою рамою, встановленою всередині рами хобота з можливістю поперечного переміщення по напрямних.2. Маніпулятор до преса за п. 1, який відрізняється тим, що він оснащений...
Інструментальний пристрій для фрезерування 3-d поверхонь
Номер патенту: 69664
Опубліковано: 15.09.2004
Автори: Луценко Максим Олександрович, Петраков Юрій Володимирович
МПК: B23C 5/16
Мітки: пристрій, фрезерування, інструментальний, поверхонь
Формула / Реферат:
Інструментальний пристрій для фрезерування 3-D поверхонь, що містить різальні елементи, встановлені в корпусі з можливістю переміщення і керуються через штовхач кулачком, з'єднаним через шток з похилою шайбою, який відрізняється тим, що пристрій оснащено коноїдом, що взаємодіє з різальними елементами, розміщеними на поворотних важелях, при цьому коноїд має заданий профіль в різних осьових перерізах і його встановлено з можливістю осьового...
Кран-маніпулятор вантажного автомобіля
Номер патенту: 57021
Опубліковано: 16.06.2003
Автор: Охримович Володимир Маркіянович
МПК: B60P 1/54
Мітки: автомобіля, вантажного, кран-маніпулятор
Формула / Реферат:
1. Кран-маніпулятор вантажного автомобіля, що містить гідравлічний привід, нерухомо прикріплену до лонжеронів шасі між кабіною і переднім бортом кузова поперечну балку з висувними опорами, обладнаними на кінцях опорними гідроциліндрами, вертикально встановлену на поперечній балці і зміщену до одного з бокових бортів поворотну колону, багатосекційну стрілу, шарнірно приєднану до поворотної колони з можливістю обертання у вертикальній площині і...
Інструментальний затискний патрон

Номер патенту: 43532
Опубліковано: 25.08.2009
Автори: Фіранський Володимир Борисович, Хилько Андрій Олегович, Журибеда Світлана Петрівна, Кузнєцов Юрій Миколайович
МПК: B23B 31/20, B23B 31/02
Мітки: інструментальний, затискний, патрон
Формула / Реферат:
Інструментальний затискний патрон, що містить пружний корпус з можливістю отримання фасонної, наприклад полігональної, форми отвору, який відрізняється тим, що в корпусі розміщені змінні пружні затискні кільця, які виконані окремо, між якими знаходиться дистанційна втулка та які в корпусі закріплені жорстко, причому фасонні отвори розташовані і зафіксовані один відносно другого під кутом
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Попередній патент: Теплове хімічне джерело струму
Наступний патент: Електричний конденсатор
Випадковий патент: Гербіцидна композиція та спосіб контролювання сходження небажаних рослин