Маніпулятор до преса
Номер патенту: 15127
Опубліковано: 15.06.2006
Автори: Тарадай Вадим Валентинович, Волошин Олексій Іванович, Колозін Володимир Іванович, Назаренко Юрій Михайлович, Голик Василь Якович, Василенко Микола Іванович
Формула / Реферат
1. Маніпулятор до преса, який містить основу, виконану у вигляді з'єднаних поперечними балками бортовин, встановлених на ходових візках, а також хобот з захватом і силові ланки, пов'язані з рамою цього хобота, який відрізняється тим, що він оснащений додатковою рамою, встановленою всередині рами хобота з можливістю поперечного переміщення по напрямних.
2. Маніпулятор до преса за п. 1, який відрізняється тим, що він оснащений встановленими на основі циліндрами відкоту, штоки яких з'єднані з рамою хобота для її поздовжнього переміщення.
3. Маніпулятор до преса за п. 1, який відрізняється тим, що його силові ланки виконані у вигляді встановлених на бортовинах у поперечному напрямку поворотних валків, оснащених двоплечими важелями, які взаємодіють за допомогою тяг відповідно з рамою хобота і гідроциліндрами підйому і нахилу.
Текст
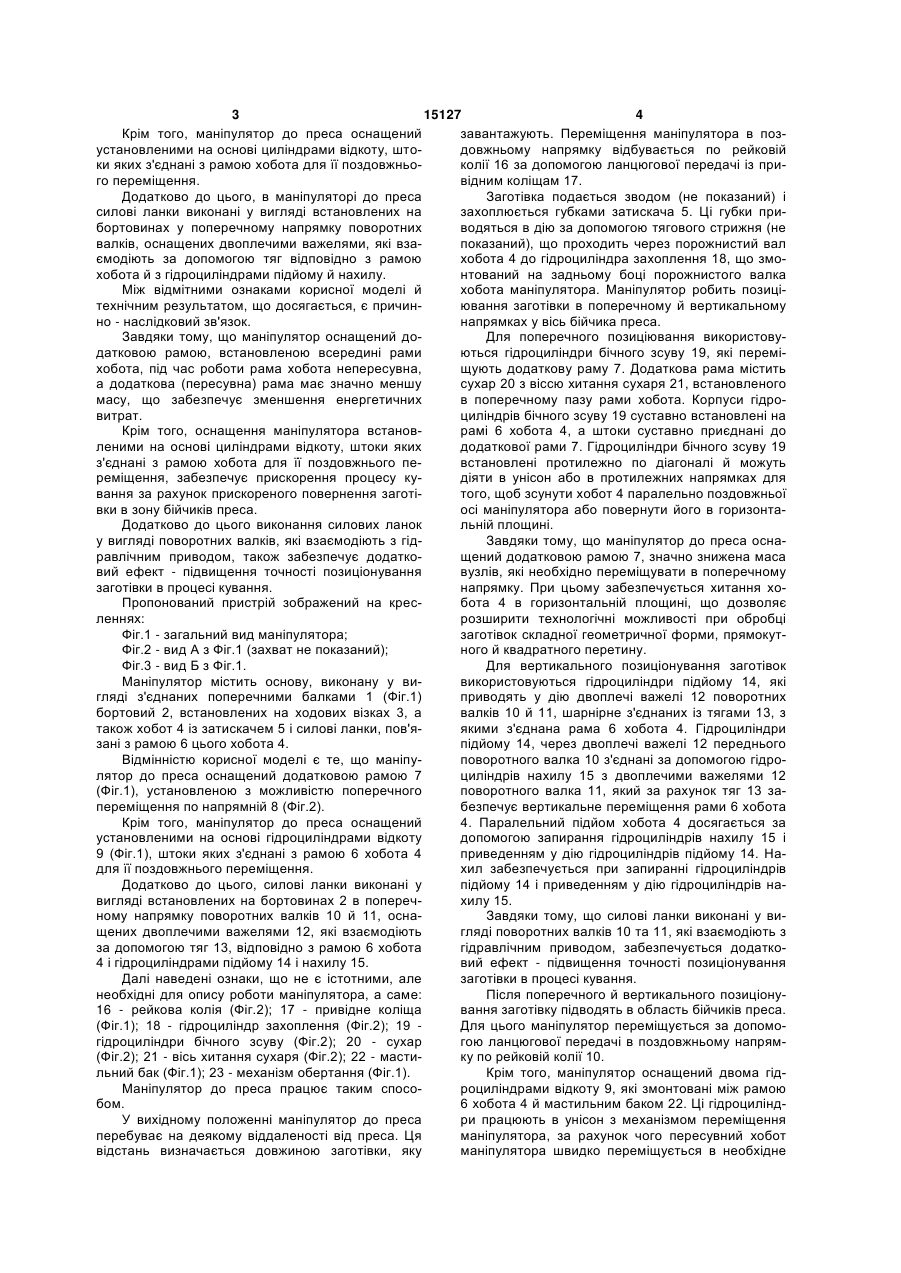
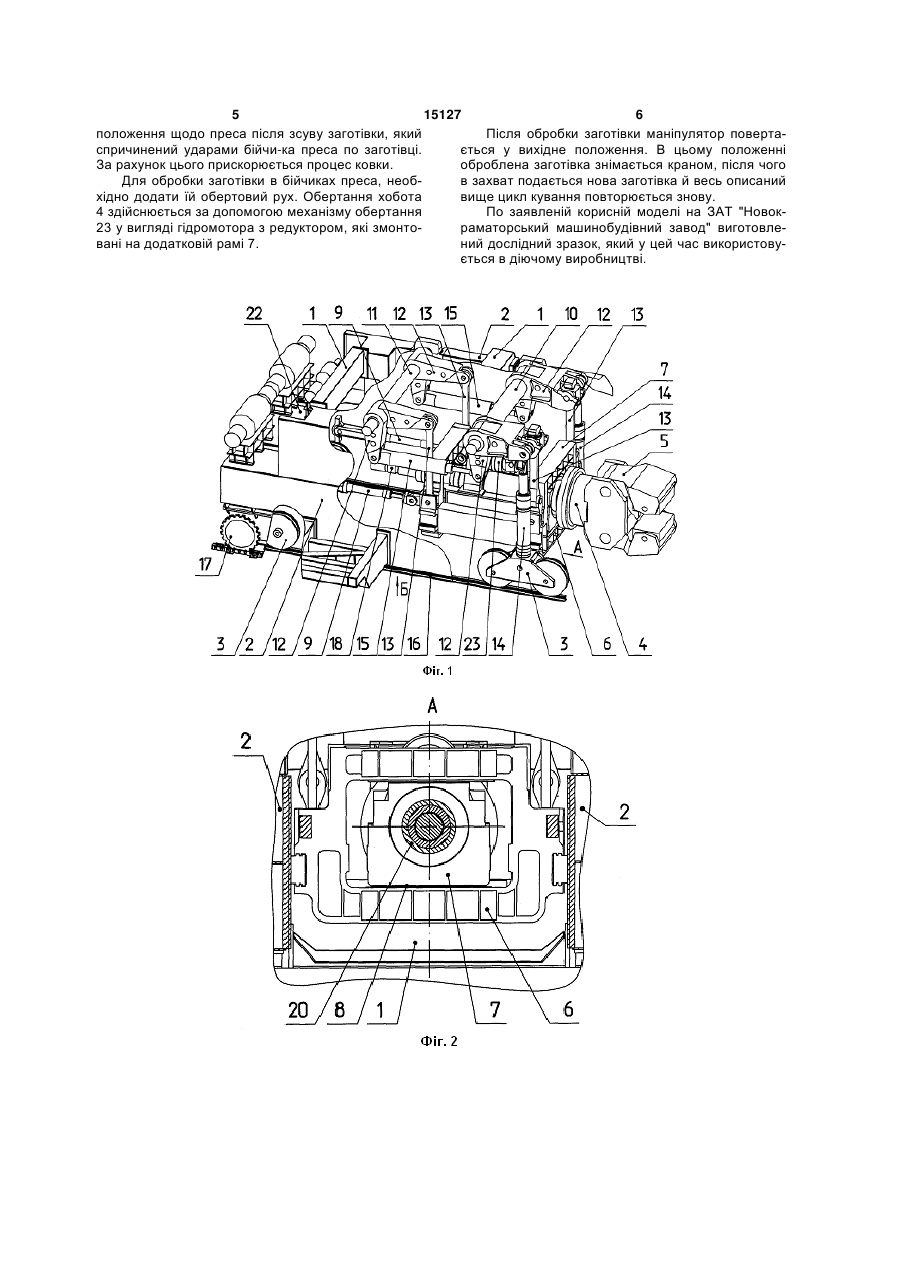
1. Маніпулятор до преса, який містить основу, виконану у вигляді з'єднаних поперечними балками бортовин, встановлених на ходових візках, а також хобот з захватом і силові ланки, пов'язані з 3 15127 4 Крім того, маніпулятор до преса оснащений завантажують. Переміщення маніпулятора в позустановленими на основі циліндрами відкоту, штодовжньому напрямку відбувається по рейковій ки яких з'єднані з рамою хобота для її поздовжньоколії 16 за допомогою ланцюгової передачі із приго переміщення. відним коліщам 17. Додатково до цього, в маніпуляторі до преса Заготівка подається зводом (не показаний) і силові ланки виконані у вигляді встановлених на захоплюється губками затискача 5. Ці губки прибортовинах у поперечному напрямку поворотних водяться в дію за допомогою тягового стрижня (не валків, оснащених двоплечими важелями, які взапоказаний), що проходить через порожнистий вал ємодіють за допомогою тяг відповідно з рамою хобота 4 до гідроциліндра захоплення 18, що змохобота й з гідроциліндрами підйому й нахилу. нтований на задньому боці порожнистого валка Між відмітними ознаками корисної моделі й хобота маніпулятора. Маніпулятор робить позицітехнічним результатом, що досягається, є причинювання заготівки в поперечному й вертикальному но - наслідковий зв'язок. напрямках у вісь бійчика преса. Завдяки тому, що маніпулятор оснащений доДля поперечного позиціювання використовудатковою рамою, встановленою всередині рами ються гідроциліндри бічного зсуву 19, які переміхобота, під час роботи рама хобота непересувна, щують додаткову раму 7. Додаткова рама містить а додаткова (пересувна) рама має значно меншу сухар 20 з віссю хитання сухаря 21, встановленого масу, що забезпечує зменшення енергетичних в поперечному пазу рами хобота. Корпуси гідровитрат. циліндрів бічного зсуву 19 суставно встановлені на Крім того, оснащення маніпулятора встановрамі 6 хобота 4, а штоки суставно приєднані до леними на основі циліндрами відкоту, штоки яких додаткової рами 7. Гідроциліндри бічного зсуву 19 з'єднані з рамою хобота для її поздовжнього певстановлені протилежно по діагоналі й можуть реміщення, забезпечує прискорення процесу кудіяти в унісон або в протилежних напрямках для вання за рахунок прискореного повернення заготітого, щоб зсунути хобот 4 паралельно поздовжньої вки в зону бійчиків преса. осі маніпулятора або повернути його в горизонтаДодатково до цього виконання силових ланок льній площині. у вигляді поворотних валків, які взаємодіють з гідЗавдяки тому, що маніпулятор до преса оснаравлічним приводом, також забезпечує додаткощений додатковою рамою 7, значно знижена маса вий ефект - підвищення точності позиціонування вузлів, які необхідно переміщувати в поперечному заготівки в процесі кування. напрямку. При цьому забезпечується хитання хоПропонований пристрій зображений на кресбота 4 в горизонтальній площині, що дозволяє леннях: розширити технологічні можливості при обробці Фіг.1 - загальний вид маніпулятора; заготівок складної геометричної форми, прямокутФіг.2 - вид А з Фіг.1 (захват не показаний); ного й квадратного перетину. Фіг.3 - вид Б з Фіг.1. Для вертикального позиціонування заготівок Маніпулятор містить основу, виконану у вивикористовуються гідроциліндри підйому 14, які гляді з'єднаних поперечними балками 1 (Фіг.1) приводять у дію двоплечі важелі 12 поворотних бортовий 2, встановлених на ходових візках 3, а валків 10 й 11, шарнірне з'єднаних із тягами 13, з також хобот 4 із затискачем 5 і силові ланки, пов'яякими з'єднана рама 6 хобота 4. Гідроциліндри зані з рамою 6 цього хобота 4. підйому 14, через двоплечі важелі 12 переднього Відмінністю корисної моделі є те, що маніпуповоротного валка 10 з'єднані за допомогою гідролятор до преса оснащений додатковою рамою 7 циліндрів нахилу 15 з двоплечими важелями 12 (Фіг.1), установленою з можливістю поперечного поворотного валка 11, який за рахунок тяг 13 запереміщення по напрямній 8 (Фіг.2). безпечує вертикальне переміщення рами 6 хобота Крім того, маніпулятор до преса оснащений 4. Паралельний підйом хобота 4 досягається за установленими на основі гідроциліндрами відкоту допомогою запирання гідроциліндрів нахилу 15 і 9 (Фіг.1), штоки яких з'єднані з рамою 6 хобота 4 приведенням у дію гідроциліндрів підйому 14. Надля її поздовжнього переміщення. хил забезпечується при запиранні гідроциліндрів Додатково до цього, силові ланки виконані у підйому 14 і приведенням у дію гідроциліндрів навигляді встановлених на бортовинах 2 в поперечхилу 15. ному напрямку поворотних валків 10 й 11, оснаЗавдяки тому, що силові ланки виконані у вищених двоплечими важелями 12, які взаємодіють гляді поворотних валків 10 та 11, які взаємодіють з за допомогою тяг 13, відповідно з рамою 6 хобота гідравлічним приводом, забезпечується додатко4 і гідроциліндрами підйому 14 і нахилу 15. вий ефект - підвищення точності позиціонування Далі наведені ознаки, що не є істотними, але заготівки в процесі кування. необхідні для опису роботи маніпулятора, а саме: Після поперечного й вертикального позиціону16 - рейкова колія (Фіг.2); 17 - привідне коліща вання заготівку підводять в область бійчиків преса. (Фіг.1); 18 - гідроциліндр захоплення (Фіг.2); 19 Для цього маніпулятор переміщується за допомогідроциліндри бічного зсуву (Фіг.2); 20 - сухар гою ланцюгової передачі в поздовжньому напрям(Фіг.2); 21 - вісь хитання сухаря (Фіг.2); 22 - мастику по рейковій колії 10. льний бак (Фіг.1); 23 - механізм обертання (Фіг.1). Крім того, маніпулятор оснащений двома гідМаніпулятор до преса працює таким спосороциліндрами відкоту 9, які змонтовані між рамою бом. 6 хобота 4 й мастильним баком 22. Ці гідроциліндУ вихідному положенні маніпулятор до преса ри працюють в унісон з механізмом переміщення перебуває на деякому віддаленості від преса. Ця маніпулятора, за рахунок чого пересувний хобот відстань визначається довжиною заготівки, яку маніпулятора швидко переміщується в необхідне 5 15127 6 положення щодо преса після зсуву заготівки, який Після обробки заготівки маніпулятор повертаспричинений ударами бійчи-ка преса по заготівці. ється у вихідне положення. В цьому положенні За рахунок цього прискорюється процес ковки. оброблена заготівка знімається краном, після чого Для обробки заготівки в бійчиках преса, необв захват подається нова заготівка й весь описаний хідно додати їй обертовий рух. Обертання хобота вище цикл кування повторюється знову. 4 здійснюється за допомогою механізму обертання По заявленій корисній моделі на ЗАТ "Новок23 у вигляді гідромотора з редуктором, які змонтораматорський машинобудівний завод" виготовлевані на додатковій рамі 7. ний дослідний зразок, який у цей час використовується в діючому виробництві. 7 Комп’ютерна верстка Г. Паяльніков 15127 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator for press
Автори англійськоюVoloshyn Oleksii Ivanovych, Vasylenko Mykola Ivanovych, Kolozin Volodymyr Ivanovych, Taradai Vadym Valentynovych
Назва патенту російськоюМанипулятор к прессу
Автори російськоюВолошин Алексей Иванович, Василенко Николай Иванович, Колозин Владимир Иванович, Тарадай Вадим Валентинович
МПК / Мітки
МПК: B21J 13/00
Мітки: маніпулятор, преса
Код посилання
<a href="https://ua.patents.su/4-15127-manipulyator-do-presa.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор до преса</a>
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Табацков Вячеслав Петрович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
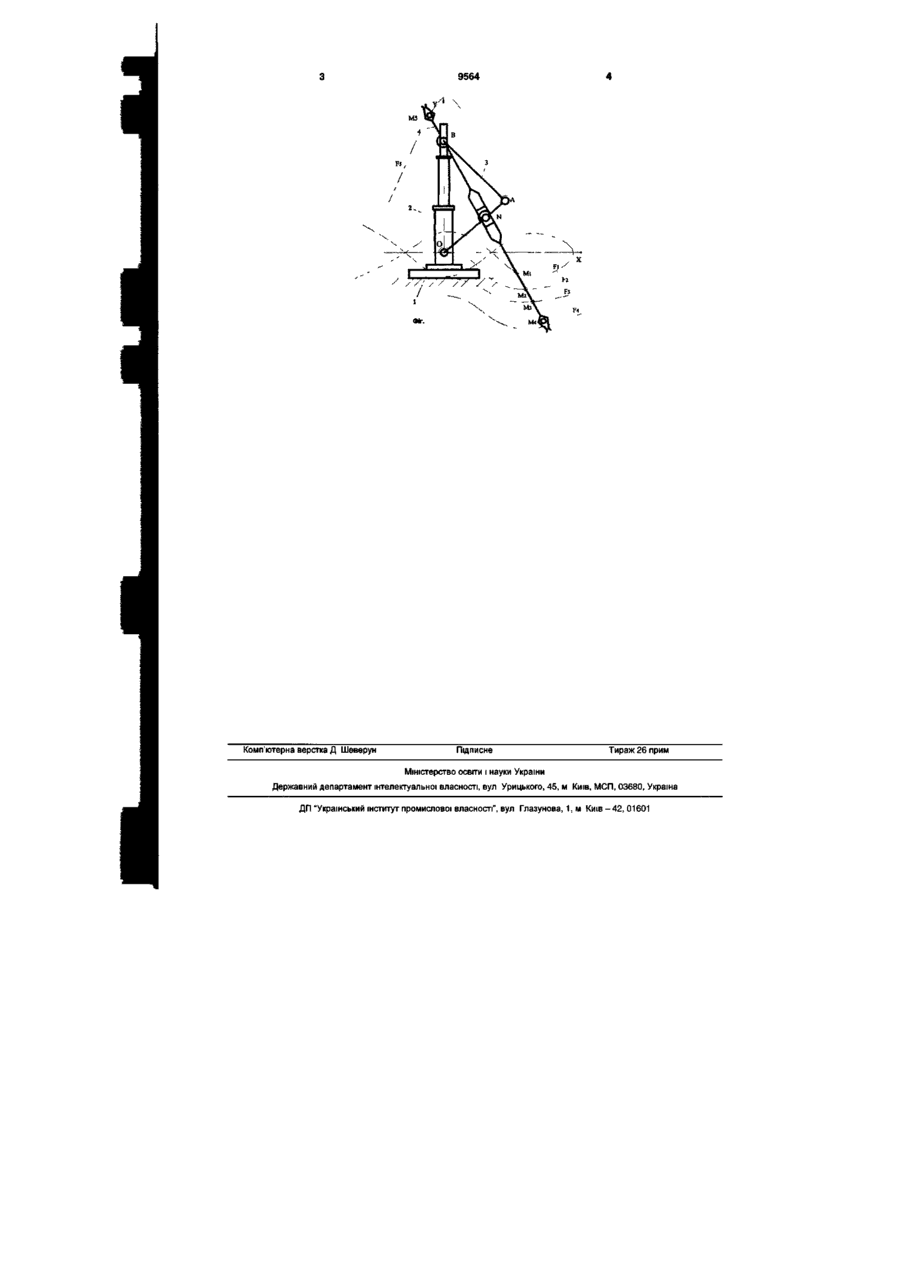
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Ковальський маніпулятор
Номер патенту: 5654
Опубліковано: 15.03.2005
Автори: Корчак Олена Сергіївна, Роганов Лев Леонідович
МПК: B21J 13/00
Мітки: ковальський, маніпулятор
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено...
Ковальський маніпулятор
Номер патенту: 10294
Опубліковано: 15.11.2005
Автори: Корчак Олена Сергіївна, Роганов Максим Львович, Роганов Лев Леонідович
МПК: B21J 13/00
Мітки: ковальський, маніпулятор
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху, рух яким надається від приводу, додаткову колісну пару, яка зв'язана з задньою колісною парою механізму пересування маніпулятора та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому, який відрізняється тим, що ковальський...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор для установлення та знімання шиберних затворів
Номер патенту: 58993
Опубліковано: 15.08.2003
Автори: Слівченко Анатолій Іванович, Музирін Олександр Олегович
МПК: B22D 41/08, B25J 1/00
Мітки: установлення, шиберних, затворів, маніпулятор, знімання
Формула / Реферат:
Маніпулятор для установлення та знімання шиберних затворів, що містить нерухомий стояк, циліндр, на штоку якого встановлено з можливістю обертання стіл, важіль з вузлом кріплення циліндра,який відрізняється тим, що стіл додатково містить знімний пристрій для формування гнізда під сталерозливний вогнетривкий стакан, а вузол кріплення циліндра виконано у вигляді нерухомо закріпленого до торця важеля корпусу з пружиною, на яку встановлено...
Попередній патент: Спосіб сівби насіння
Наступний патент: Спосіб визначення індивідуальної норми варіабельності ритму серця в людини
Випадковий патент: Пристрій для контролю внутрішнього діаметра труби