Спосіб безконтактного вимірювання 3d координат об`єкта
Номер патенту: 44900
Опубліковано: 26.10.2009
Автори: Юкиш Сергій Васильович, Юкиш Марина Йосипівна, Білинський Йосип Йосипович
Формула / Реферат
Спосіб безконтактного вимірювання 3D координат об'єкта, який включає освітлення поверхні випромінюванням та реєстрацію зображення променів, який відрізняється тим, що почергово освітлюють тестову та вимірювану поверхні горизонтальним та вертикальним бінарними патернами, виділяють лінії патернів, визначають 2D координати точок перетину патернів, за якими визначають третю координату глибини і формують 3D зображення вимірюваної поверхні.
Текст
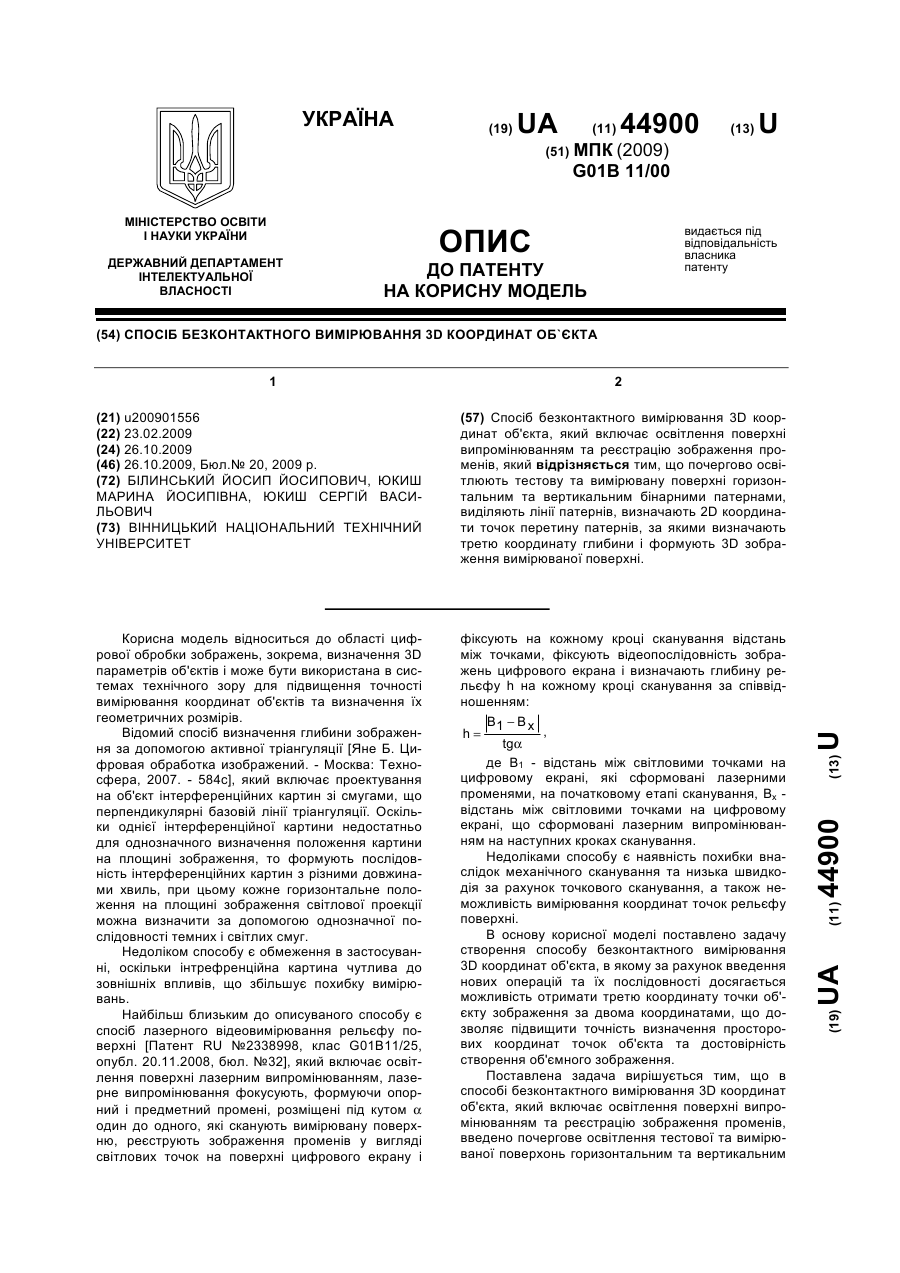
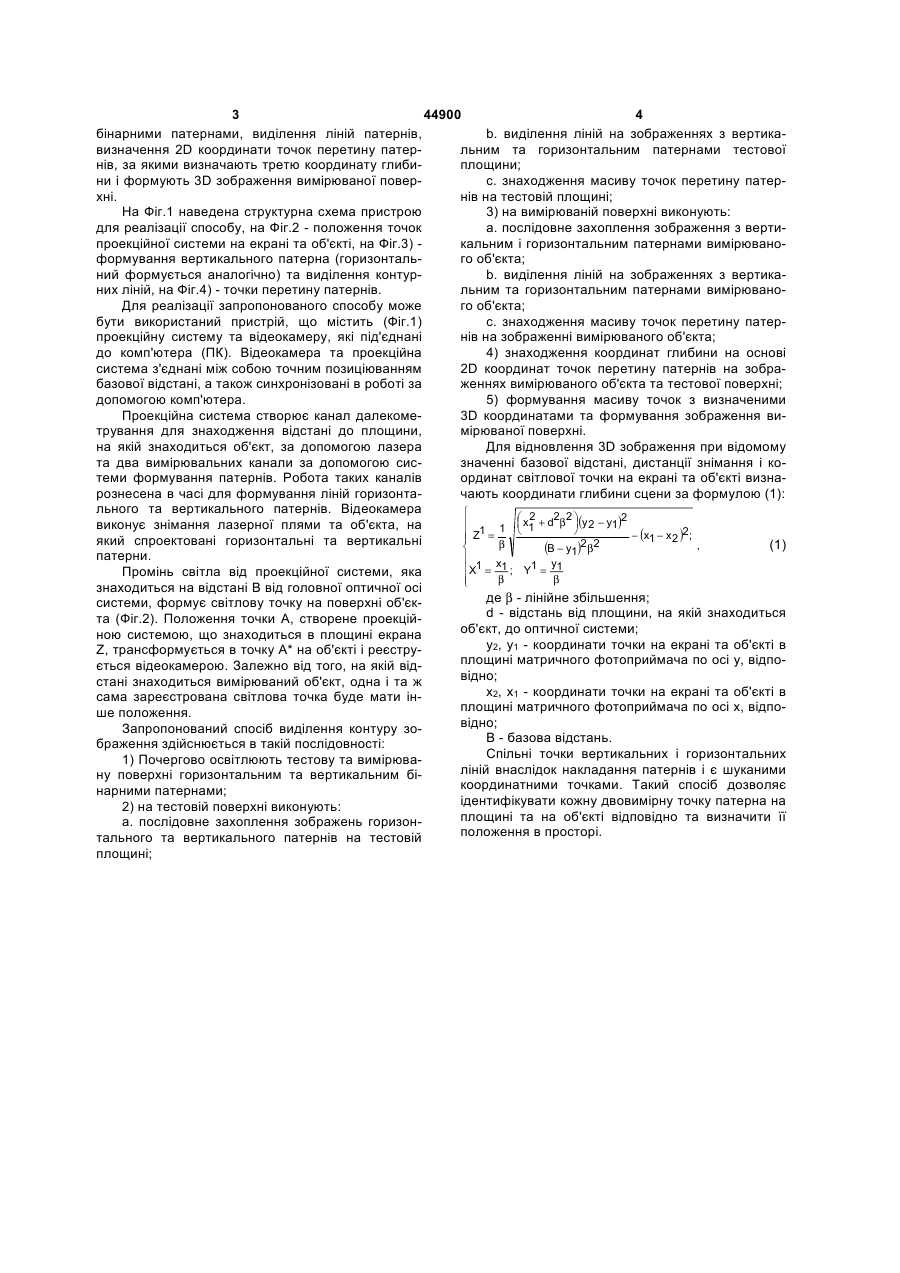
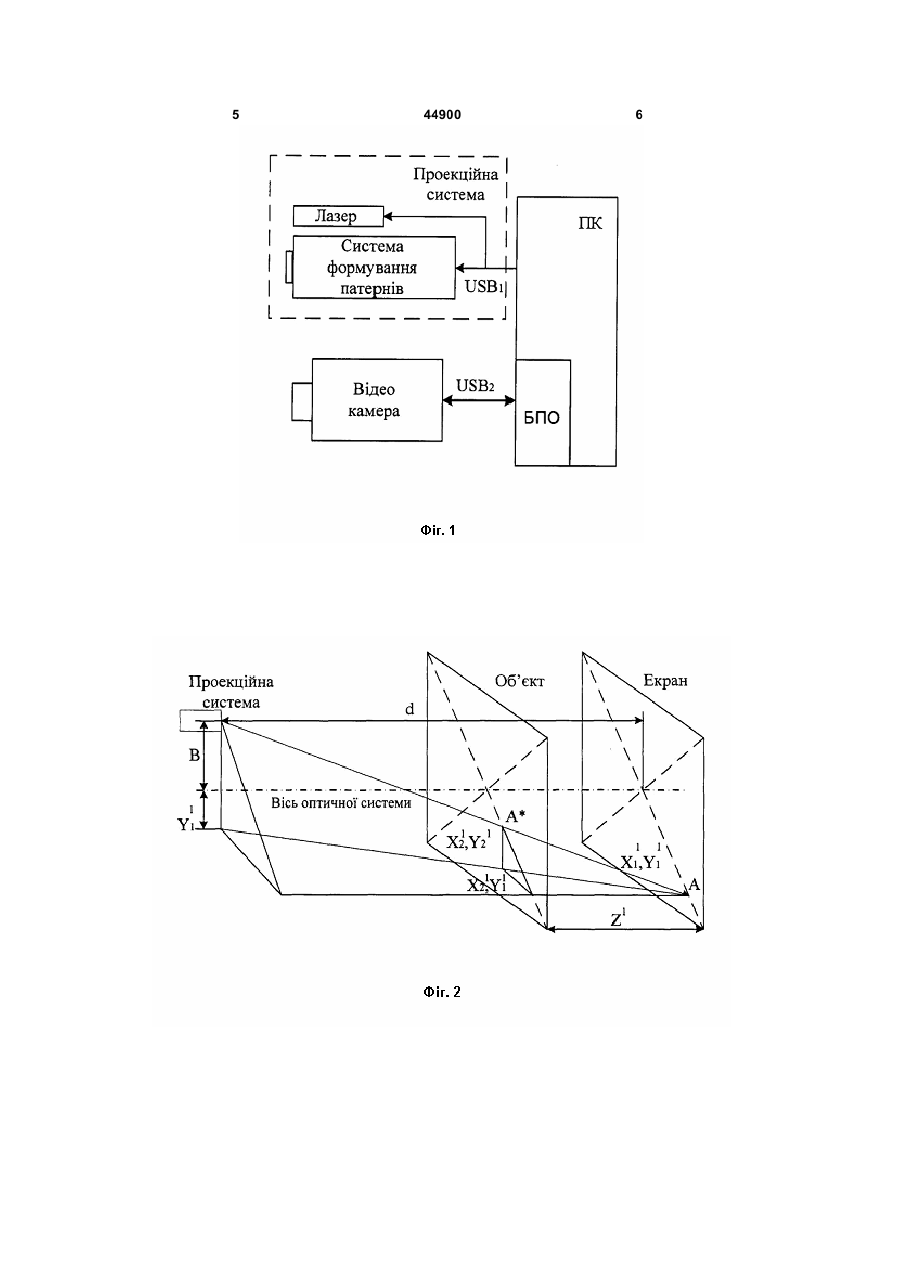
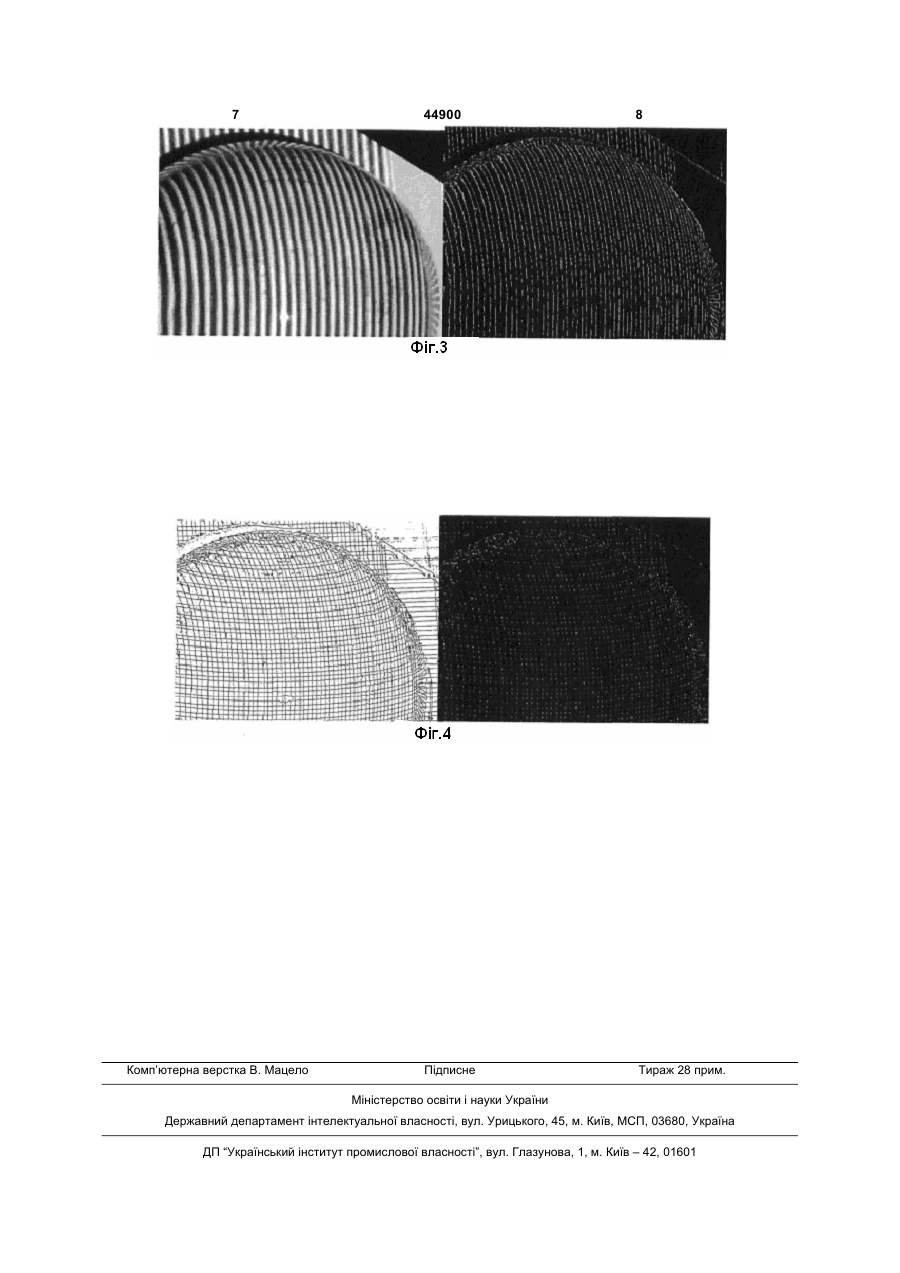
Спосіб безконтактного вимірювання 3D координат об'єкта, який включає освітлення поверхні випромінюванням та реєстрацію зображення променів, який відрізняється тим, що почергово освітлюють тестову та вимірювану поверхні горизонтальним та вертикальним бінарними патернами, виділяють лінії патернів, визначають 2D координати точок перетину патернів, за якими визначають третю координату глибини і формують 3D зображення вимірюваної поверхні. (19) (21) u200901556 (22) 23.02.2009 (24) 26.10.2009 (46) 26.10.2009, Бюл.№ 20, 2009 р. (72) БІЛИНСЬКИЙ ЙОСИП ЙОСИПОВИЧ, ЮКИШ МАРИНА ЙОСИПІВНА, ЮКИШ СЕРГІЙ ВАСИЛЬОВИЧ (73) ВІННИЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ 3 44900 4 b. виділення ліній на зображеннях з вертикабінарними патернами, виділення ліній патернів, льним та горизонтальним патернами тестової визначення 2D координати точок перетину патерплощини; нів, за якими визначають третю координату глибис. знаходження масиву точок перетину патерни і формують 3D зображення вимірюваної повернів на тестовій площині; хні. 3) на вимірюваній поверхні виконують: На Фіг.1 наведена структурна схема пристрою a. послідовне захоплення зображення з вертидля реалізації способу, на Фіг.2 - положення точок проекційної системи на екрані та об'єкті, на Фіг.3) кальним і горизонтальним патернами вимірюваноформування вертикального патерна (горизонтальго об'єкта; b. виділення ліній на зображеннях з вертиканий формується аналогічно) та виділення контурльним та горизонтальним патернами вимірюваноних ліній, на Фіг.4) - точки перетину патернів. го об'єкта; Для реалізації запропонованого способу може с. знаходження масиву точок перетину патербути використаний пристрій, що містить (Фіг.1) нів на зображенні вимірюваного об'єкта; проекційну систему та відеокамеру, які під'єднані 4) знаходження координат глибини на основі до комп'ютера (ПК). Відеокамера та проекційна 2D координат точок перетину патернів на зобрасистема з'єднані між собою точним позиціюванням женнях вимірюваного об'єкта та тестової поверхні; базової відстані, а також синхронізовані в роботі за допомогою комп'ютера. 5) формування масиву точок з визначеними Проекційна система створює канал далекоме3D координатами та формування зображення витрування для знаходження відстані до площини, мірюваної поверхні. на якій знаходиться об'єкт, за допомогою лазера Для відновлення 3D зображення при відомому та два вимірювальних канали за допомогою сисзначенні базової відстані, дистанції знімання і котеми формування патернів. Робота таких каналів ординат світлової точки на екрані та об'єкті визнарознесена в часі для формування ліній горизонтачають координати глибини сцени за формулою (1): льного та вертикального патернів. Відеокамера ⎧ ⎛ x 2 + d2β2 ⎞(y − y )2 ⎪ ⎜ 1 ⎟ 2 1 виконує знімання лазерної плями та об'єкта, на ⎠ ⎪ Z1 = 1 ⎝ − (x1 − x 2 )2; ⎪ який спроектовані горизонтальні та вертикальні 2 β2 β , (1) ⎨ (B − y1) патерни. ⎪ x1 y1 ⎪ X1 = ; Y1 = Промінь світла від проекційної системи, яка ⎪ β β ⎩ знаходиться на відстані В від головної оптичної осі де β - лінійне збільшення; системи, формує світлову точку на поверхні об'єкd - відстань від площини, на якій знаходиться та (Фіг.2). Положення точки А, створене проекційоб'єкт, до оптичної системи; ною системою, що знаходиться в площині екрана у2, у1 - координати точки на екрані та об'єкті в Z, трансформується в точку А* на об'єкті і реєструплощині матричного фотоприймача по осі у, відпоється відеокамерою. Залежно від того, на якій відвідно; стані знаходиться вимірюваний об'єкт, одна і та ж х2, х1 - координати точки на екрані та об'єкті в сама зареєстрована світлова точка буде мати інплощині матричного фотоприймача по осі х, відпоше положення. відно; Запропонований спосіб виділення контуру зоВ - базова відстань. браження здійснюється в такій послідовності: Спільні точки вертикальних і горизонтальних 1) Почергово освітлюють тестову та вимірюваліній внаслідок накладання патернів і є шуканими ну поверхні горизонтальним та вертикальним бікоординатними точками. Такий спосіб дозволяє нарними патернами; ідентифікувати кожну двовимірну точку патерна на 2) на тестовій поверхні виконують: площині та на об'єкті відповідно та визначити її a. послідовне захоплення зображень горизонположення в просторі. тального та вертикального патернів на тестовій площині; 5 44900 6 7 Комп’ютерна верстка В. Мацело 44900 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for contact-less measurement of 3d coordinates of object
Автори англійськоюBilynsky Yosyp Yosypovych, Yukysh Maryna Yosypivna, Yukysh Serhii Vasyliovych
Назва патенту російськоюСпособ бесконтактного измерения 3d координат объекта
Автори російськоюБилинский Иосиф Иосифович, Юкиш Марина Иосифовна, Юкиш Сергей Васильевич
МПК / Мітки
МПК: G01B 11/00
Мітки: координат, безконтактного, об'єкта, спосіб, вимірювання
Код посилання
<a href="https://ua.patents.su/4-44900-sposib-bezkontaktnogo-vimiryuvannya-3d-koordinat-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб безконтактного вимірювання 3d координат об`єкта</a>
Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта
Номер патенту: 32140
Опубліковано: 12.05.2008
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
МПК: G01B 15/02
Мітки: автоматизованого, пристрій, поверхні, визначення, об'єкта, криволінійної, координат, точок, тривимірної
Формула / Реферат:
Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об'єкта, що містить блок опромінення поверхні об'єкта і блок реєстрації зображення опроміненої поверхні, який відрізняється тим, що блок опромінення поверхні об'єкта виконаний з можливістю опромінення поверхні об'єкта системою паралельних ліній, розташованих у світловій чи несвітловій області електромагнітного спектра випромінювань, блок реєстрації...
Пристрій для визначення координат тривимірної криволінійної поверхні об`єкта
Номер патенту: 25633
Опубліковано: 10.08.2007
Автори: Астанін В'ячеслав Валентинович, Олефір Ганна Олексіївна
МПК: G01B 5/30
Мітки: пристрій, криволінійної, поверхні, координат, об'єкта, тривимірної, визначення
Формула / Реферат:
Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що напрямний стрижень виконаний циліндричним і забезпечений засобами кріплення безпосередньо на вимірюваній ділянці поверхні, а жорстко з'єднаний з...
Спосіб gps-визначення координат рухомого об’єкта
Номер патенту: 82794
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Боровий Валентин Олександрович, Надточій Олександр Володимирович
МПК: G01B 7/004
Мітки: об'єкта, спосіб, рухомого, gps-визначення, координат
Формула / Реферат:
Спосіб GPS-визначення координат рухомого об'єкта, що заснований на одночасному визначенні координат групою антен GPS-приймачів при їх розосередженні, який відрізняється тим, що з антен GPS-приймачів формують горизонтальну шкалу-лінійку з визначеними інтервалами, при цьому при маневруванні об'єкта поздовжню вісь шкали-лінійки повертають навколовертикальної осі та утримують лінію, що з'єднує центри антен, під кутом
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Мосов Сергій Петрович, Савченко Віталій Анатолійович, Машков Олег Альбертович, Кравченко Юрій Васильович
МПК: G01S 5/02
Мітки: визначення, рухомого, система, координат, об'єкта, швидкості
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Спосіб визначення протяжності та географічних координат рубежу прикриття об’єкта охорони
Номер патенту: 32100
Опубліковано: 12.05.2008
Автори: Шинкарук Олег Миколайович, Лисий Микола Іванович, Купрієнко Дмитро Анатолійович, Міхєєв Борис Миколайович
МПК: G08B 13/02
Мітки: охорони, рубежу, визначення, протяжності, географічних, спосіб, координат, прикриття, об'єкта
Формула / Реферат:
Спосіб визначення протяжності та географічних координат рубежуприкриття об'єкта охорони, який включає сигналізаційний прилад з однимчутливим елементом, що забезпечує визначення факту і часу порушеннярубежу охорони, який відрізняється тим, що застосовується дальномірнийсигналізаційний прилад з двома чутливими елементами, які встановлюють намісцевості паралельно у дві лінії з одночасною їх топографічною...
Попередній патент: Спосіб виготовлення полотна з мінеральних штапельних волокон з гірських порід
Наступний патент: Спосіб створення сортів озимого тритикале з підвищеними технологічними показниками якості зерна
Випадковий патент: Збірна будівельна конструкція сферичної або купольної форми