Виправочно-підбивочно-обробна машина

Формула / Реферат
1. Выправочно-подбивочно-отделочная машина, содержащая раму, опирающуюся на ходовые тележки с приводом на их перемещения, смонтированные на ней привод перемещения машины, тормозную систему, системы энергоснабжения и управления, шарнирно соединенную с рамой и установленную с возможностью перемещения вдоль нее приводом шаговых перемещений дополнительную раму, опирающуюся на ходовые устройства с колесными парами и несущую смонтированные между этими устройствами подбивоч-ные, подъемные и выправочные агрегаты с приводами, нивелировочные ирихтовочные системы отсчета координат, отличающаяся тем, что, с целью повышения удобства эксплуатации и повышения срока службы, она снабжена автономным приводом перемещения дополнительной рамы и автономной тормозной системой для взаимодействия с колесной парой заднего по ходу движения ходового устройства дополнительной рамы.
2. Машина по п. 1, отличающаяся тем, что тормозная система дополнительной рамы и смонтированная на раме тормозная система соединены с общим источником давления системы энергоснабжения или с центральной тормозной системой машины.
3. Машина по п. 1, отличающаяся тем, что привод перемещения дополнительной рамы и привод перемещения рамы связаны с центральным приводом перемещения машины.
4. Машина по п. 1, отличающаяся тем, что привод шаговых перемещений дополнительной рамы связан с приводами указанных агрегатов через концевой выключатель, который смонтирован на дополнительной раме.
5. Машина по п. 1, отличающаяся тем, что тормозная система и привод перемещения дополнительной рамы связаны с устройством для измерения расстояния, которое смонтировано на дополнительной раме.
6. Машина по п. 1, отличающаяся тем, что дополнительная рама расположена перед рамой по ходу движения машины.
Текст
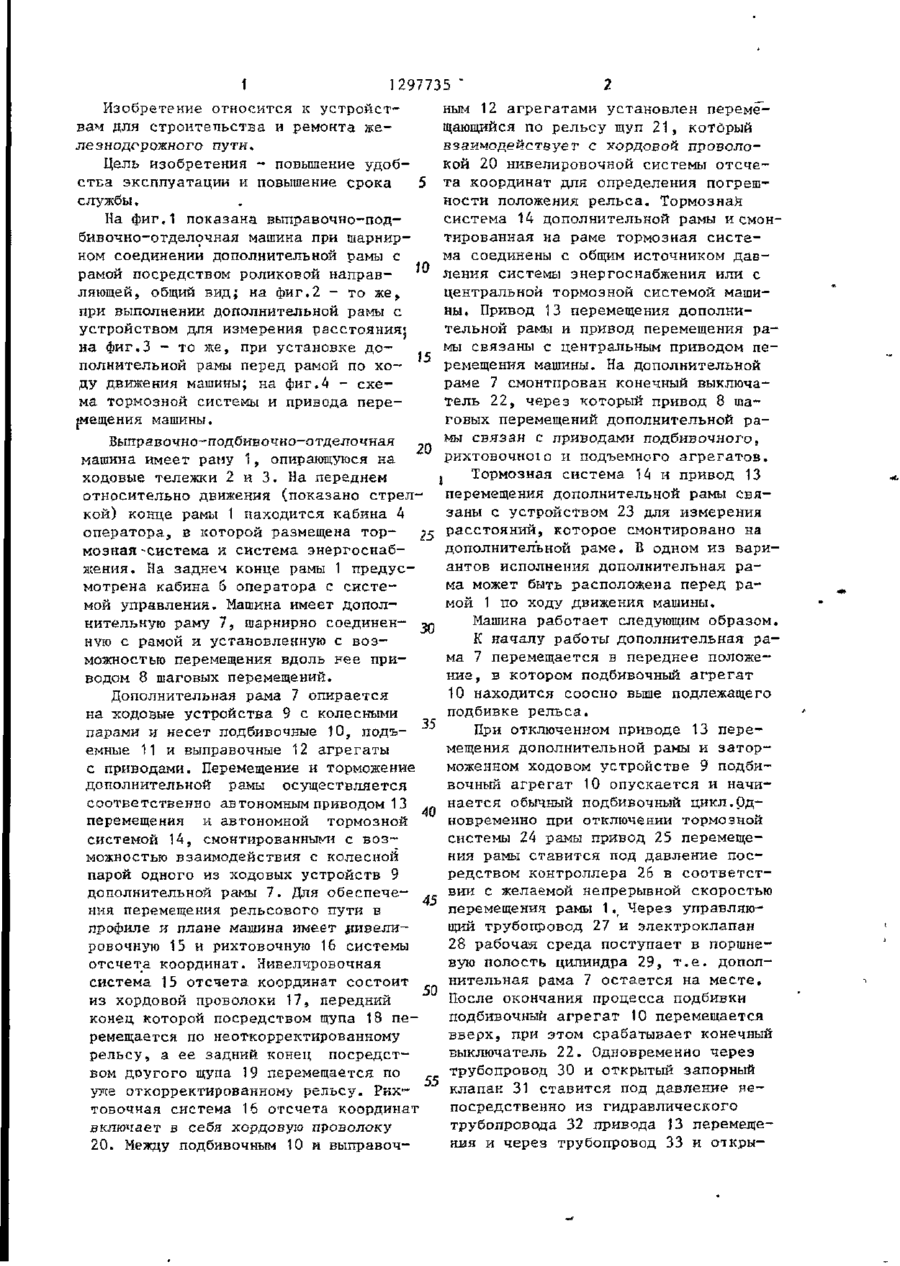
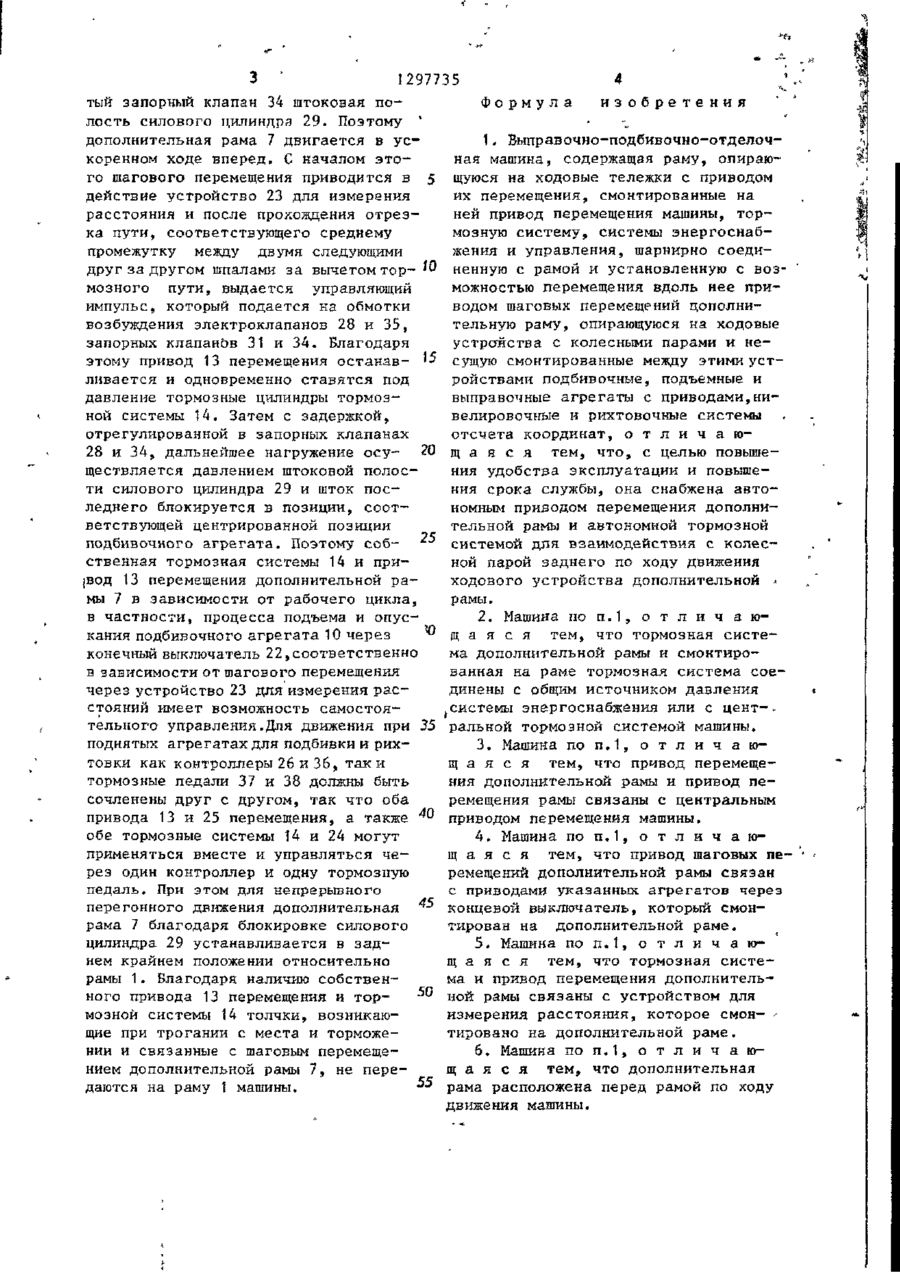
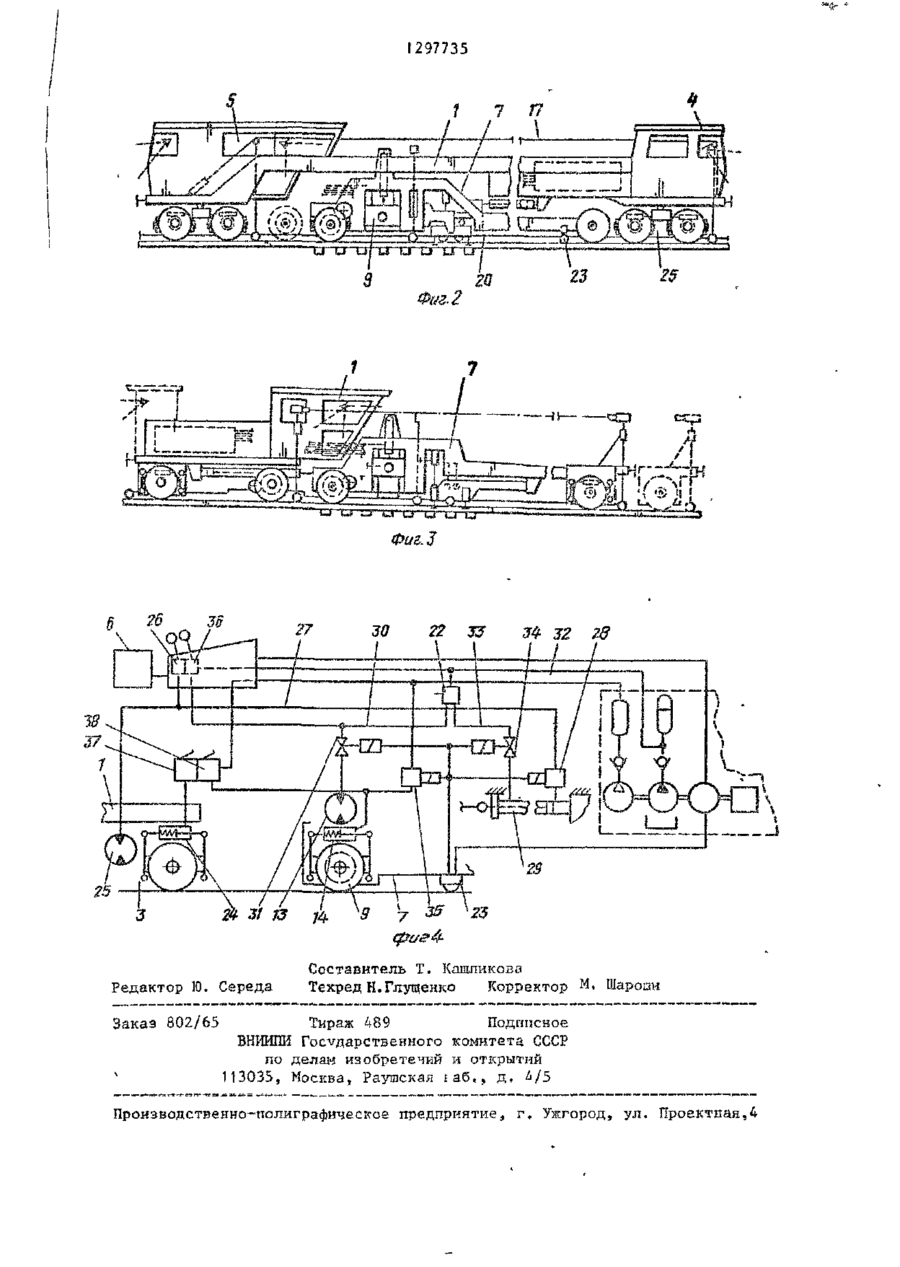
Изобретение относится к устройствам для строительства и ремонта железнодорожного пути. Цель изобретения - повышение удобства в эксплуатации и срока службы. Быправочноподбивочно-отделочная машина имеет раму I и дополнительную раму 7, шар™ кирно соединенную с рамой и установленную с возможностью перемещения вдоль нее приводом 8 шаговых перемещений. На дополнительной раме 7 смонтированы подбивоччые 10(подъемные 11 и выправочиые 12 агрегаты» Перемещение дополнительной рамы 7 осуществляется автономным приводом 13 перемещения, а торможение - автономной тормозной системой 14, которая смонтирована с возможностью взаимодействия с колесной парой заднего по ходу движения ходового устройства 9 дополнительной рамы. Благодаря наличию собственного привода \Ъ перемещения и тормозной системы 14^ ТОЛЧКІЇ,возникающие при трогании с места к торможении и связанные с шагозым перемещением дополнительной рамы 7, не передаются на раму 1 машины. 5 з-п, ф-лы. 4 ил. CO & TJ 1 1297735 Изобретение относится i устройстt вам для строитепьства и ремонта железнодорожного пути. Цель изобретения - повышение удобства эксплуатации и повышение срока службы. На фиг,1 показана выправочно-подбивочно-отделочная машина при шарнирном соединении дополнительной рамы с 10 рамой посредством роликовой направляющей, общий вид; на фиг.2 - то же, при выполнении дополнительной рамы с устройством для измерения расстояния: на фиг.З - то же, при установке дополнительной рамы перед рамой по хо- 15 ду движения машины; на фиг.4 - схема тормозной системы и привода перемещения машины. ным 12 агрегатами установлен перемещающийся по рельсу щуп 21, который взаимодействует с хордовой проволокой 20 нивелировочной системы отсчета координат для определения погрешности положения рельса. Тормозная система 14 дополнительной рамы и смонтированная на раме тормозная система соединены с общим источником давления системы энергоснабжения или с центральной тормозной системой машины. Привод 13 перемещения дополнительной рамы и привод перемещения рамы связаны с центральным приводом перемещения машины. На дополнительной раме 7 смонтирован конечный выключатель 22, через который привод 8 шаговых перемещений дополнительной рамы связан с приводами подбивочного, Выправочно-подбивочно—отделочная 20 рихтовочноїо и подъемного агрегатов. машина имеет рану 1, опирающуюся на . Тормозная система 14 и привод 13 ходовые тележки 2 и 3. На переднем перемещения дополнительной рамы свяотносительно движения (показано стрелзаны с устройством 23 для измерения кой) конце рамы 1 находится кабина 4 расстояний, которое смонтировано на оператора, в которой размещена тор- 25 дополнительной раме. В одном из варимозная-система и система энергоснабантов исполнения дополнительная ражения. На заднем конце рамы 1 предусма может быть расположена перед рамотрена кабина б оператора с системой 1 по ходу движения машины. мой управления. Машина имеет дополнительную раму 7, шарнирно соединенМашина работает следующим образом. ную с рамой и установленную с возК началу работы дополнительная раможностью перемещения вдоль нее прима 7 перемещается в переднее положеводом 8 шаговых перемещений. ние, в котором подбивочный агрегат 10 находится соосно выше подлежащего Дополнительная рама 7 опирается подбивке рельса. на ходовые устройства 9 с колесными При отключенном приводе 13 перепарами и несет подбивочные 10, подъ- 35 мещения дополнительной рамы и заторемные 11 и выправочные 12 агрегаты моженном ходовом устройстве 9 подбис приводами. Перемещение и торможение вочный агрегат 10 опускается и начидополнительной раны осуществляется нается обычный подбивочный цикл.Одсоответственно автономным приводом 13 новременно при отключении тормозной перемещения и автономной тормозной системы 24 рамы привод 25 перемещесистемой 14, смонтированными с возния рамы ставится под давление посможностью взаимодействия с колесной редством контроллера 26 в соответстпарой одного из ходовых устройств 9 вии с желаемой непрерывной скоростью дополнительной рамы 7. Для обеспече45 перемещения рамы 1 _ Через управляю. ния перемещения рельсового пути в щий трубопровод 27 и электроклапан профиле и плане машина имеет нивели28 рабочая среда поступает в поршнеровочную 15 и рихтовочную 16 системы вую полость цилиндра 29, т.е. дополотсчета координат. Нивелировочная нительная рама 7 остается на месте. система 15 отсчета координат состоит После окончания процесса подбивки из хордовой проволоки 17, передний подбивочный агрегат 10 перемещается конец которой посредствомщупа 18 певверх, при этом срабатывает конечный ремещается по неоткорректированному выключатель 22. Одновременно через рельсу, а ее задний конец посредсттрубопровод 30 и открытый запорный вом доугого щупа 19 перемещается по 55 клапан 31 ставится под давление неуже откорректированному рельсу. Рих~ посредственно из гидравлического товочная система 16 отсчета координат трубопровода 32 привода 13 перемещевключает в себя хордовую проволоку ния и через трубопровод 33 и откры20. Между подбивочным 10 и выправоч зо З ' 1297735 тый запорный клапан 34 штоковая поФормула изобретения лость силового цилиндра 29. Поэтому ' дополнительная рама 7 двигается в ус1, Выправочно-подбивочно-отделочкоренном ходе вперед. С началом этоная машина, содержащая раму, опираюго шагового перемещения приводится в 5 щуюся на ходовые тележки с приводом действие устройство 23 для измерения их перемещения, смонтированные на расстояния и после прохождения отрезней привод перемещения машины, торка пути, соответствующего среднему мозную систему, системы энергоснабпромежутку между двумя следующими жения и управления, шарнирно соедидруг за другом шпалами за вычетом тор- ^ ненную с рамой и установленную с возмозного пути, выдается управляющий можностью перемещения вдоль нее приимпульс, который подается на обмотки водом шаговых перемещений дополнивозбуждения электроклапанов 28 и 35, тельную раму, опирающуюся на ходовые запорных клапанов 31 и 34. Благодаря устройства с колесными парами и неэтому привод 13 перемещения останав- '5 сущую смонтированные между этими устлнвается и одновременно ставятся под ройствами подбивочные, подъемные и давление тормозные цилиндры тормозвыправочные агрегаты с приводами,ниной системы 14. Затем с задержкой, велировочные и рихтовочные системы отрегулированной в запорных клапанах отсчета координат, о т л и ч а ю 28 и 34, дальнейшее нагружение осу- 20 щ а я с я тем, что, с целью повышеществляется давлением штоковой полосния удобства эксплуатации и повышети силового цилиндра 29 и шток посния срока службы, она снабжена автоледнего блокируется в позиции, соотномным приводом перемещения дополниветствующей центрированной позиции тельной рамы и автономной тормозной подбивочного агрегата. Поэтому соб- 25 системой для взаимодействия с колесственная тормозная системы 14 и приной парой заднего по ходу движения |вод 13 перемещения дополнительной раходового устройства дополнительной . мы 7 в зависимости от рабочего цикла, рамы. в частности, процесса подъема и опус2. Машина по п.1, о т л и ч а юкания подбивочного агрегата 10 через Ю щ а я с я тем, что тормозная систеконечный выключатель 22,соответственно ма дополнительной рамы и смонтиров зависимости от шагового перемещения ванная на раме тормозная система соечерез устройство 23 для измерения расдинены с общим источником давления энергоснабжения или с цент-. ( системы стоянии имеет возможность самостоя тельного управления.Для движения при поднятых агрегатах для подбивки и рихтовки как контроллеры 26 и 36, таки тормозные педали 37 и 38 должны быть сочленены друг с другом, так что оба привода 13 и 25 перемещения, а также обе тормозные системы 14 и 24 могут применяться вместе и управляться через один контроллер и одну тормозную педаль. При этом для непрерывного перегонного движения дополнительная рама 7 благодаря блокировке силового цилиндра 29 устанавливается в заднем крайнем положении относительно рамы 1. Благодаря наличию собственного привода 13 перемещения и тормозной системы 14 толчки, возникающие при трогании с места и торможении и связанные с шаговым перемещением дополнительной рамы 7, не передаются на раму 1 машины. 35 ральной тормозной системой машины, 3. Машина по п. 1 , о т л и ч а ю щ а я с я тем, что привод перемещения дополнительной рамы и привод перемещения рамы связаны с центральным 40 приводом перемещения машины. 4. Машина по п.1, о т л и ч а ю щ а я с я тем, что привод шаговых перемещений дополнительной рамы связан с приводами указанных агрегатов через 45 концевой выключатель, который смонтирован на дополнительной раме. 5. Машина по п.1, о т л и ч а ю щ а я с я тем, что тормозная система и привод перемещения дополнитель50 ной рамы связаны с устройством для измерения расстояния, которое смон-
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E01B 27/17
Мітки: виправочно-підбивочно-обробна, машина
Код посилання
<a href="https://ua.patents.su/4-4768-vipravochno-pidbivochno-obrobna-mashina.html" target="_blank" rel="follow" title="База патентів України">Виправочно-підбивочно-обробна машина</a>
Безперервно пересувна у процесі роботи виправочнопідбивочно-обробна машина
Номер патенту: 3602
Опубліковано: 27.12.1994
Автори: Йьора Ганц, Йоханн Хансманн
МПК: E01B 27/17
Мітки: роботи, виправочнопідбивочно-обробна, машина, процесі, безперервної, пересувна
Формула / Реферат:
1. Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина, содержащая раму, один конец которой оперт на ходовую тележку, смонтированные на раме кабину оператора, силовую установку, привод ходовой тележки, контрольно-измерительное устройство, включающее в себя базовую систему отсчета, дополнительную раму, один конец которой установлен в направляющих рамы машины, а второй оперт на вторую ходовую тележку, привод...
Пересувна виправочно-підбивочна машина

Номер патенту: 4772
Опубліковано: 28.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: виправочно-підбивочна, машина, пересувна
Формула / Реферат:
1. Передвижная выправочно-подбивочная машина, содержащая опирающуюся на ходовые тележки несущую раму, дополнительную раму, размещенную между ходовыми тележками и установленную с возможностью продольного перемещения приводом по направляющим, которые смонтированы на несущей раме, шпалоподбивочный рабочий орган, смонтированный на дополнительной раме с возможностью перемещения в вертикальной плоскости приводом, смонтированный перед...
Пересувна виправочно-підбивочна машина

Номер патенту: 4771
Опубліковано: 28.12.1994
Автори: Йозеф Тойрер, Йоханн Хансманн
МПК: E01B 27/17
Мітки: машина, виправочно-підбивочна, пересувна
Формула / Реферат:
1. Передвижная выправочно-подбивочная машина, содержащая опирающуюся на ходовые тележки несущую раму с пультом управления, дополнительную раму, размещенную между ходовыми тележками, установленную с возможностью продольного перемещения приводом в виде силового цилиндра и одним концом опирающуюся на одноосную ходовую тележку, шпалоподбивочный рабочий орган, смонтированный на дополнительной раме с возможностью перемещения в вертикальной...
Виплавочно-підбивочно-оброблювальна машина
Номер патенту: 4787
Опубліковано: 28.12.1994
Автори: Гернот Бьок, Йозеф Тойрер
МПК: E01B 27/17
Мітки: машина, виплавочно-підбивочно-оброблювальна
Формула / Реферат:
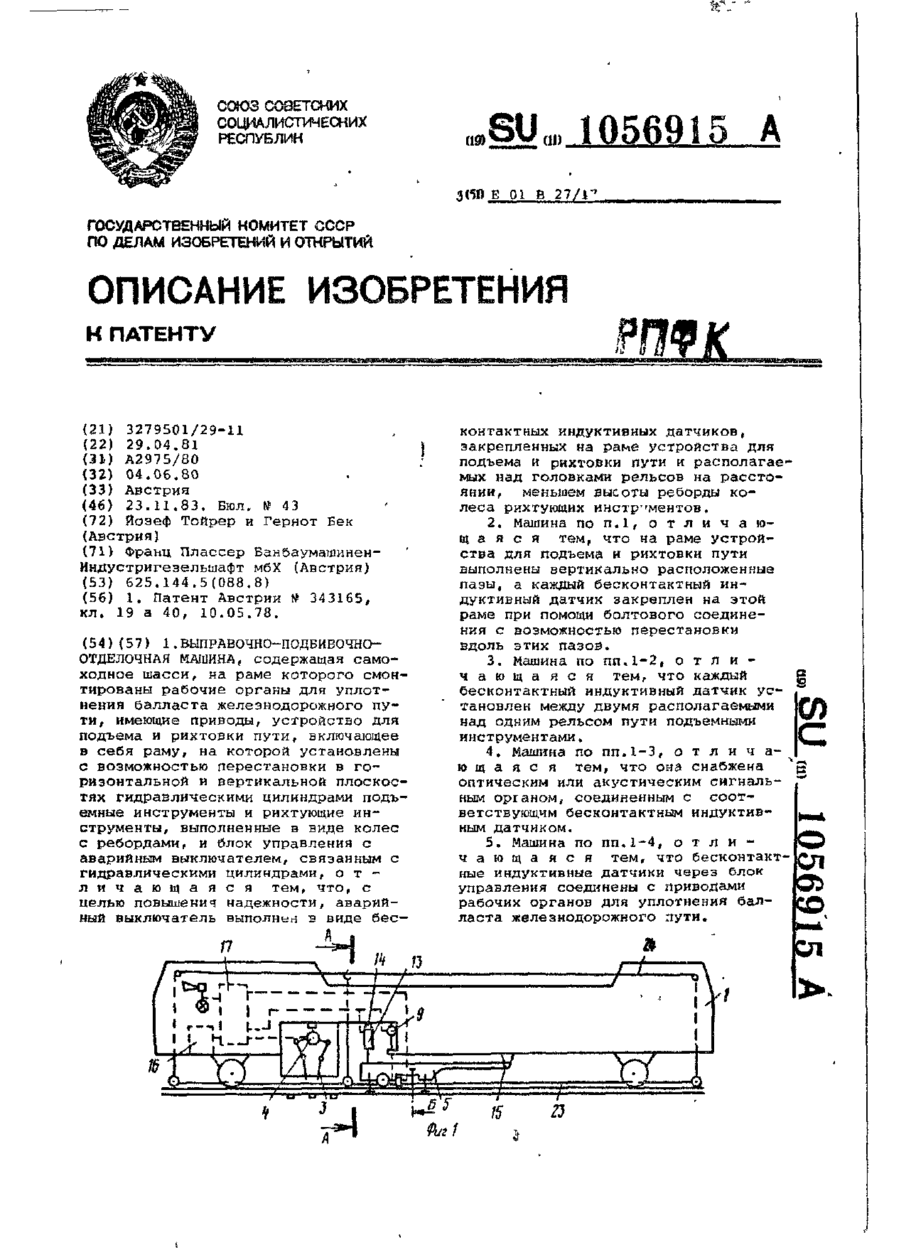
1. Выправочно-подбивочно-отделочная машина, содержащая самоходное шасси, на раме которого смонтированы рабочие органы для уплотнения балласта железнодорожного пути, имеющие приводы, устройство для подъема и рихтовки пути, включающее в себя раму, на которой установлены с возможностью перестановки в горизонтальной и вертикальной плоскостях гидравлическими цилиндрами подъемные инструменты и рихтующие инструменты, выполненные в виде колес с...
Шпалопідбивочна машина

Номер патенту: 3620
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/16
Мітки: машина, шпалопідбивочна
Формула / Реферат:
Шпалоподбивочная машина, содержащая установленную на ходовые тележки раму, шпалоподбивочный агрегат, смонтированный на раме с возможностью перемещения в вертикальной плоскости приводом и состоящий из инструментальной рамы, установленных на ней шпалоподбивочных инструментов, размещенных по две пары с обеих сторон от продольной оси машины, виброприводов и приводов подачи шпалоподбивочных инструментов, отличающаяся тем, что, с целью...
Попередній патент: Спосіб отримання 4-ацил-2,3-дигідро-1,4-бензоксазинів чи бензтиазинів
Наступний патент: Спосіб очищення газів від сірководню і двуокісу вуглецю
Випадковий патент: Установка для збереження якісних показників непастеризованого молока