Привод гідромотора у виконавчих механізмах кувального маніпулятора
Номер патенту: 48879
Опубліковано: 12.04.2010
Автори: Василенко Микола Іванович, Тарадай Вадим Валентинович, Солодюк Віталій Іванович, Садовий Юрій Георгійович

Формула / Реферат
Привод гідромотора у виконавчих механізмах кувального маніпулятора, що містить регульований силовий насос, зв'язаний через запобіжний клапан та зворотний клапан, які установлені на виході насоса, і трипозиційний гідророзподільник з гідромотором, який має датчик швидкості його обертання, та підключені до порожнин гідромотора антишокові запобіжні й підживлювальні зворотні клапани, з'єднані з газовим акумулятором і зворотним клапаном, який відрізняється тим, що він оснащений пілотним електропропорційним запобіжним клапаном, безпосередньо пов'язаним з антишоковими запобіжними клапанами, а також підживлювальним насосом низького тиску із запобіжним клапаном, які через зворотний клапан з'єднані з антишоковими запобіжними клапанами, і підживлювальними зворотними клапанами, при цьому до входу регульованого силового насоса підключені додаткові запобіжний клапан та зворотний клапан, який зв'язує вхід силового насоса й вихід підживлювального насоса.
Текст
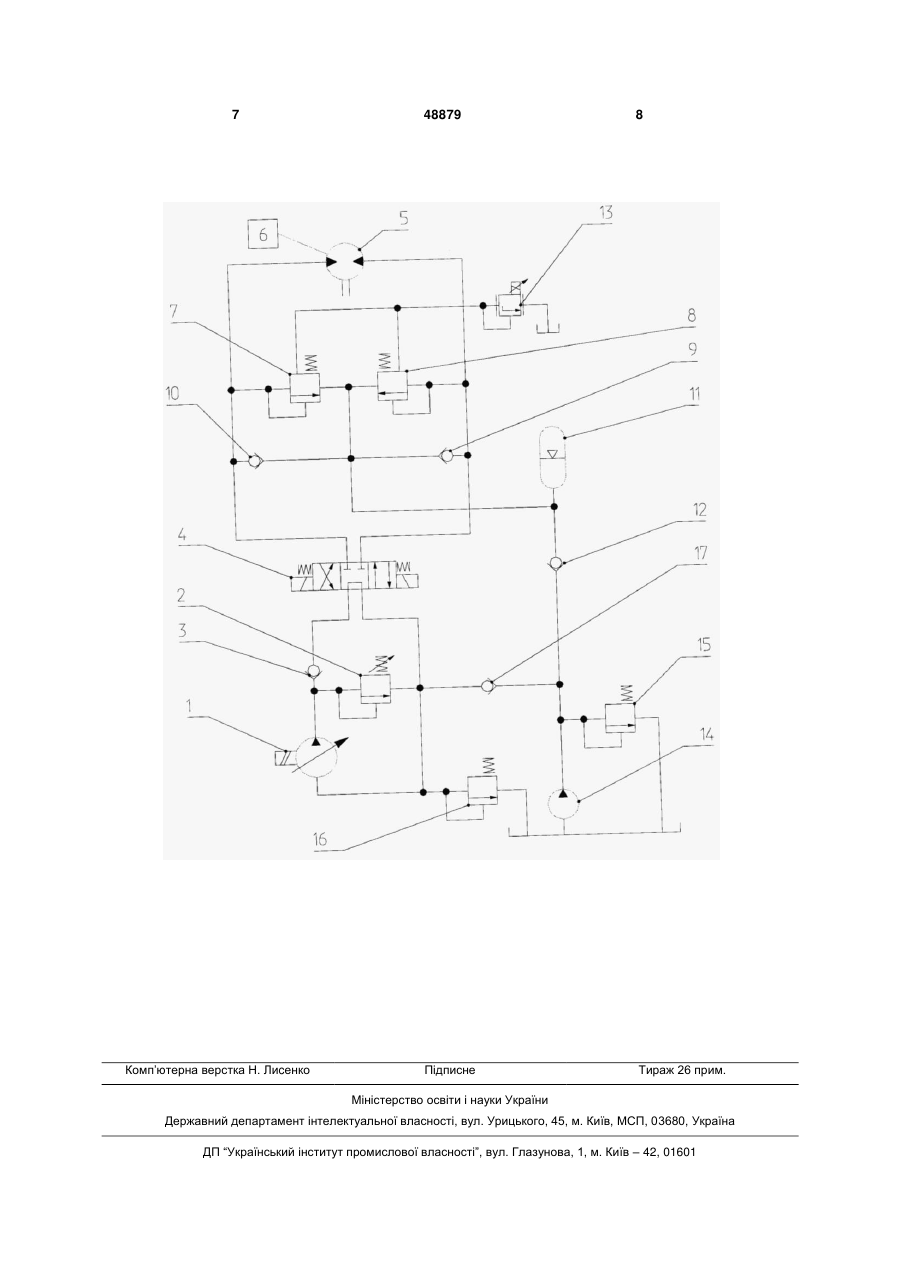
Привод гідромотора у виконавчих механізмах кувального маніпулятора, що містить регульований силовий насос, зв'язаний через запобіжний клапан та зворотний клапан, які установлені на виході насоса, і трипозиційний гідророзподільник з гідромотором, який має датчик швидкості його 3 позиційний гідророзподільник з гідромотором, порожнини якого з'єднані між собою аварійними запобіжними клапанами й зв'язані через зворотні клапани з підживлювальним баком, а через інший трипозиційний розподільник, дросель і зворотний клапан з газогідравлічним акумулятором. Порожнини гідромотора з'єднані між собою двопозиційним гідророзподільником, електромагніт якого, приєднаний до блоку керування, пов'язаному з датчиком швидкості обертання гідромотора. Додатково привод містить блок завдання швидкості обертання вала гідромотора, підключений до елемента порівняння, з іншим виходом якого зв'язаний датчик швидкості, а вихід елемента порівняння з'єднаний із входом блоку керування. Розгін привода відбувається від акумулятора при включенні одного з електромагнітів другого трипозиційного розподільника. Із затримкою, по досягненні заданої швидкості включенням першого гідророзподільника до гідромотора підключається регульований силовий насос, який попередньо набрав відповідну подачу. Гальмування здійснюється ступнево. Спочатку зменшується подача до силового насоса, при цьому компенсація надлишкового обсягу рідини на всасі силового насоса відбувається за рахунок підключення другим гідророзподільником акумулятора. При зниженні швидкості обертання вала гідромотора перший гідророзподільник відключає насос, другий гідророзподільник відключає акумулятор, а залишкова енергія гаситься одним з аварійних запобіжних клапанів. Зупинка із загасаючими коливаннями біля нульового значення відбувається за рахунок з'єднання між собою порожнин гідромотора за допомогою двопозиційного гідророзподільника. Додатково для зменшення динамічних навантажень при зупинці тривалість включення двопозиційного гідророзподільника змінюється залежно від неузгодженості сигналів блоку завдання й датчика швидкості. У цьому приводі усунутий головний недолік попередньої конструкції привода: підвищена надійність за рахунок зменшення динамічних навантажень у результаті використання елемента порівняння, що по неузгодженості сигналу від блоку завдання швидкості змінює тривалість включення гідророзподільника. Однак, прототип має недолік, пов'язаний з невисокою продуктивністю внаслідок низької якості й тривалості перехідних процесів (розгін і гальмування) механізмів кувального маніпулятора. В основу корисної моделі поставлене завдання підвищення продуктивності гідроприводу у виконавчих механізмах кувального маніпулятора. Це завдання вирішується за рахунок технічного результату, який складається в зниженні динамічних навантажень на елементи привода й зменшенні часу позиціонування механізму кувального маніпулятора. Для досягнення вищевказаного результату привод гідромотора у виконавчих механізмах кувального маніпулятора, що містить регульований силовий насос, зв'язаний через запобіжний клапан та зворотний клапан, які установлені на виході 48879 4 насоса, та трипозиційний гідророзподільник з гідромотором, який має датчик швидкості його обертання, і також підключені до порожнин гідромотора антишокові запобіжні й підживлювальні зворотні клапани, з'єднані з газовим акумулятором і зворотним клапаном, відповідно до корисної моделі, постачений пілотним електропропорційним запобіжним клапаном, безпосередньо пов'язаним з антишоковими запобіжними клапанами, а також підживлювальним насосом низького тиску із запобіжним клапаном, які через зворотний клапан з'єднані з антишоковими запобіжними клапанами, і підживлювальними зворотними клапанами, при цьому до входу регульованого силового насоса підключені додаткові запобіжний клапан та зворотний клапан, який зв'язує вхід силового насоса й вихід підживлювального насоса. У результаті порівняльного аналізу привода гідромотора у виконавчих механізмах кувального маніпулятора із прототипом установлено, що вони мають наступні загальні ознаки: - регульований силовий насос; - запобіжний клапан та зворотний клапан, які установлені на виході регульованого силового насоса; - трипозиційний гідророзподільник; - гідромотор; - датчик швидкості обертання гідромотора; - антишокові запобіжні клапани; - підживлювальні зворотні клапани, - газовий акумулятор; - зворотнийклапан, а також відмітні ознаки: - постачання пілотним електропропорційним запобіжним клапаном, безпосередньо пов'язаним з антишоковими запобіжними клапанами; - постачання підживлювальним насосом низького тиску, який через зворотний клапан з'єднаний з антишоковими запобіжними клапанами й підживлювальними зворотними клапанами; - постачання запобіжним клапаном підживлювального насоса; підключення до входу регульованого силового насоса додаткового запобіжного клапана; - підключення до входу регульованого силового насоса додаткового зворотного клапана, який зв'язує вхід силового насоса й вихід підживлювального насоса. Таким чином, запропонований привод гідромотора у виконавчих механізмах кувального маніпулятора має нове конструктивне виконання вузлів і деталей, нові зв'язки вузлів і деталей, а також нове розміщення їх відносно один одного. Між відмітними ознаками й технічним результатом, який досягається, існує причиннонаслідковий зв'язок. Завдяки тому, що привод гідромотора постачений пілотним електропропорційним запобіжним клапаном, безпосередньо пов'язаним з антишоковими запобіжними клапанами, а також підживлювальним насосом низького тиску із запобіжним клапаном, які через зворотний клапан з'єднані з антишоковими запобіжними клапанами, і підживлювальними зворотними клапанами, при цьому до входу регульованого силового насоса підключені 5 додаткові запобіжний клапан і зворотний клапан, що зв'язує вхід силового насоса й вихід підживлювального насоса, стало можливим замість загасання коливань швидкості біля нульового значення (залишкового коливання) одержати однократне незначне відкочення механізму маніпулятора при зупинки й знизити динамічні навантаження на елементи механізму. Виключення з вищевказаної сукупності відмітних ознак хоча б одного не забезпечує досягнення технічного результату. Технічне рішення, що заявляється, невідомо з рівня техніки й тому воно є новим. Корисна модель, яка заявляється, промислове придатна, тому що її технологічне й технічне виконання не представляє труднощів. По цьому технічному рішенню виконані робочі проекти приводів переміщення візка й обертання хобота для кувальних маніпуляторів МК30 і МК70, вантажопідйомністю 30т АКК-3000 у КПЦ-2 ЗАТ «НКМЗ» і 70т АКК-5000 у КПЦ-3 ЗАТ «НКМЗ» відповідно. Таким чином, технічному рішенню, яке заявляється може надаватися правова охорона, тому що воно є новим, і промислове придатним, тобто відповідає критеріям корисної моделі. На кресленні представлена принципова схема передбачуваного привода гідромотора у виконавчих механізмах кувального маніпулятора. Привод містить регульований силовий насос 1, зв'язаний через запобіжний клапан 2 і зворотний клапан 3 на виході насоса 1, та через трипозиційний гідророзподільник 4 з гідромотором 5. Гідромотор 5 має датчик швидкості обертання 6. До порожнин гідромотора 5 підключені антишокові запобіжні клапани 7 та 8 і підживлювальні зворотні клапани 9 та 10, які з'єднані з газовим акумулятором 11 і зворотним клапаном 12. Додатково привод постачений пілотним електропропорційним запобіжним клапаном 13, безпосередньо пов'язаним з антишоковими запобіжними клапанами 7 та 8, а також підживлювальним насосом низького тиску 14 із запобіжним клапаном 15, які через зворотний клапан 12 з'єднані з антишоковими запобіжними клапанами 7 і 8 та підживлювальним зворотними клапанами 9 і 10 При цьому, до входу регульованого силового насоса 1 підключений запобіжний клапан 16 і зворотний клапан 17, який зв'язує вхід силового насоса 1 і вихід підживлювального насоса 14. Привод гідромотора у виконавчих механізмах кувального маніпулятора працює таким чином. У вихідному положенні електромагніти гідророзподільника 4 відключені, силовий насос 1 відключений від гідромотора 5 й здійснює циркуляцію мінімальної кількості робочої рідини по замкнутому контуру. Підживлювальний насос низького тиску 14 підтримує тиск в акумуляторі 11, з тиском попередньої зарядки газом порядку 60 % від регулювання клапана 15. На пілотний клапан з електропропорційним керуванням 13 подається сигнал, що 48879 6 відповідає максимальному тиску спрацьовування антишокових клапанів 7 та 8. Для розгону привода гідромотором 5 включається один з електромагнітів гідророзподільника 4, після чого силовий насос 1 набирає подачу. У теж час, з метою зм'якшення перехідного процесу, пов'язаного з підвищенням тиску в напірних лініях, тиск регулювання пілотного клапана 13 трохи знижується. Підтримка мінімального тиску, що виключає кавітацію на вході силового насоса 1, відбувається за рахунок підживлювального насоса 14 через зворотний клапан 17 і з акумулятора 11 через один зі зворотних клапанів 9 або 10. По досягненні заданої швидкості гідромотором 5 регулювання пілотного клапана 13 збільшується до максимуму. У процесі обробки заготівлі кувальним пресом, залежно від обраного режиму, регулювання пілотного клапана 13 можуть змінюватися синхронно з рухом інструмента преса, зменшуючи динамічні навантаження на елементи привода спрацьовуванням антишокових клапанів 7 або 8. Гальмування гідромотора 5 відбувається в наступному порядку. На пропорційний електромагніт пілотного клапана 13 подається сигнал завдання тиску регулювання, який істотно нижче максимального, одночасно силовий насос 1 починає зменшувати подачу робочої рідини, а електромагніт гідророзподільника 4 відключається. Кінетична енергія механізму плавно гаситься шляхом перетворення її в тепло робочій рідині на золотниках антишокових клапанів 7 та 8, керованих пілотним клапаном 13, при цьому запасена в акумуляторі 11 рідина забезпечує підтримку в порожнинах гідромотора 5 мінімального тиску, захищаючи від кавітації. Зниження подачі силового насоса 1 триває до мінімального значення, при цьому динамічні навантаження на його вході гасяться запобіжним клапаном 16. Про закінчення гальмування гідромотора 5 сигналізує датчик швидкості його обертання 6. Зупинка гідромотора 5, що виключає залишкові коливання механізму, починається по сигналу від датчика швидкості 6. Спочатку на електромагніт пілотного клапана 13 подається короткочасний сигнал, що відповідає його мінімальному регулюванню, що скидає залишковий тиск у порожнинах гідромотора 6 через клапани 7 та 8 в акумулятор 11. Після цього на електромагніт пілотного клапана 13 подається сигнал, що відповідає максимальному значенню. Позиціонування механізму представляє собою швидко загасаючий перехідний процес із незначним відкоченням. Таким чином, використання привода гідромотора у виконавчих механізмах кувального маніпулятора, відповідно до формули корисної моделі, дозволить підвищити продуктивність маніпулятора за рахунок скорочення часу й підвищення точності позиціонування відповідних механізмів приведених гідромотором. 7 Комп’ютерна верстка Н. Лиcенко 48879 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of hydraulic motor in actuators of forging manipulator
Автори англійськоюVasylenko Mykola Ivanovych, Solodiuk Vitalii Ivanovych, Sadovyi Yurii Heorhiiovych, Taradai Vadym Valentynovych
Назва патенту російськоюПривод гидромотора в исполнительных механизмах ковочного манипулятора
Автори російськоюВасиленко Николай Иванович, Солодюк Виталий Иванович, Садовый Юрий Георгиевич, Тарадай Вадим Валентинович
МПК / Мітки
МПК: B21J 3/00
Мітки: привод, маніпулятора, механізмах, виконавчих, гідромотора, кувального
Код посилання
<a href="https://ua.patents.su/4-48879-privod-gidromotora-u-vikonavchikh-mekhanizmakh-kuvalnogo-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Привод гідромотора у виконавчих механізмах кувального маніпулятора</a>
Привод гідродвигуна у виконавчих механізмах кувального маніпулятора
Номер патенту: 1758
Опубліковано: 25.10.1994
Автори: Грабер Павло Михайлович, Гелерман Борис Мусійович
МПК: B21D 43/18
Мітки: механізмах, привод, виконавчих, кувального, маніпулятора, гідродвигуна
Формула / Реферат:
Привод гидродвигателя в исполнительных механизмах ковочного манипулятора, содержащий гидрораспределитель, связанный подводами с гидродвигателем, манипуляторы высокого и низкого давления и обратные клапаны, сообщающие подводы гидродвигателя с аккумуляторами высокого и низкого давления, механизм управления скоростью в виде насоса регулируемой производительности с подпиточным клапаном на всасывающей магистрали, сообщенной с подводом механизма...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: типу, комп'ютерного, миша, підкладочний, килимок, маніпулятора
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Колісний хід з приводом від гідромотора
Номер патенту: 41078
Опубліковано: 12.05.2009
Автори: Хайліс Гедаль Абрамович, Кравчук Володимир Іванович
МПК: B60B 11/00
Мітки: хід, колісний, приводом, гідромотора
Формула / Реферат:
Колісний хід з приводом від гідромотора, що містить ведуче колесо, кільце, гідромотор зі шківом, боковину, передню вісь і напрямні колеса, який відрізняється тим, що гідромотор змонтований на опорній поверхні боковини, боковина змонтована на осі ведучого колеса, шків гідромотора щільно примикає до внутрішньої поверхні кільця, кільце жорстко прикріплене до внутрішньої поверхні обода ведучого колеса, а рама машини спирається на ведуче і...
Електрогідравлічний кроковий привод
Номер патенту: 38097
Опубліковано: 25.12.2008
Автори: Узунов Олександр Васильович, Галецький Олександр Сергійович, Ночніченко Ігор Вікторович
МПК: F15B 15/18
Мітки: електрогідравлічний, кроковий, привод
Формула / Реферат:
Електрогідравлічний привод, який містить задатчик команд, зв'язаний з електропідсилювачем, що зв'язаний з блоком позиціювання, який в свою чергу зв'язаний з гідродвигуном, який відрізняється тим, що блок позиціювання реалізовано за допомогою крокового двигуна, який через редуктор зв'язаний з шестерним насосом, причому електропідсилювач зв'язаний з кроковим двигуном, а шестерний насос зв'язаний з гідродвигуном.
Гідравлічна система трактора
Номер патенту: 30776
Опубліковано: 11.03.2008
Автори: Топчій Сергій Іванович, Нємчик Сергій Михайлович, Філіппов Анатолій Захарович
МПК: F15B 7/00
Мітки: гідравлічна, трактора, система
Формула / Реферат:
Гідравлічна система трактора, що включає бак для оливи з фільтром і перепускним клапаном, насос високого тиску, гідророзподільник з золотниками і запобіжним клапаном та гідроциліндр навіски, яка відрізняється тим, що вона додатково містить насос ручної прокачки оливи, з'єднаний з баком і лінією високого тиску гідравлічної системи, пневмогідроакумулятор, з'єднаний з лінією високого тиску через зворотний клапан, клапан розвантаження насоса,...
Попередній патент: Нагрівач електричний побутовий
Наступний патент: Машина дробильна молоткова
Випадковий патент: Застібка для з'єднання та ґудзик застібки для з'єднання