Спосіб балансування роторів
Формула / Реферат
1. Спосіб балансування роторів, що полягає у тому, що по повздовжній осі ротора спрямовують лазерний промінь, надають ротору обертання і по колу, яке описує промінь на екрані, встановленому перпендикулярно до осі обертання ротора, визначають величину дисбалансу, який потім усувають у одній чи двох площинах корекції, який відрізняється тим, що положення точки лазерного променя на екрані визначається для моменту, коли ротор повернутий відносно землі на певний кут.
2. Спосіб балансування роторів по п. 1, який відрізняється тим, що для визначення положення точки лазерного променя на екрані в момент, коли ротор повернутий відносно землі на певний кут, використовується блок синхронного вмикання лазерного променя.
3. Спосіб балансування роторів по п. 1, який відрізняється тим, що для визначення положення точки лазерного променя на екрані в момент, коли ротор повернутий відносно землі на певний кут, використовується поляризований фільтр.
4. Спосіб балансування роторів по п. 3, який відрізняється тим, що перед екраном встановлюється щит з вузькою прямолінійною щілиною, яка починається з осі обертання ротора.
5. Спосіб балансування роторів по п. 1, який відрізняється тим, що визначення положення точки лазерного променя на екрані в момент, коли ротор повернутий відносно землі на певний кут, здійснюється миттєвим зніманням координат точки.
6. Спосіб балансування роторів по пп. 1, 2, 3, 4, 5, який відрізняється тим, що екран може рухатись по осі вала ротора.
7. Спосіб балансування роторів по пп. 1, 2, 3, 4, 5, який відрізняється тим, що екран напівпрозорий і за ним встановлений другий екран.
8. Спосіб балансування роторів по пп. 1, 2, 3, 4, 5, який відрізняється тим, що аналогічно спрямовується другий лазерний промінь у протилежний по відношенню до першого променя бік і з його боку встановлюється другий екран.
Текст
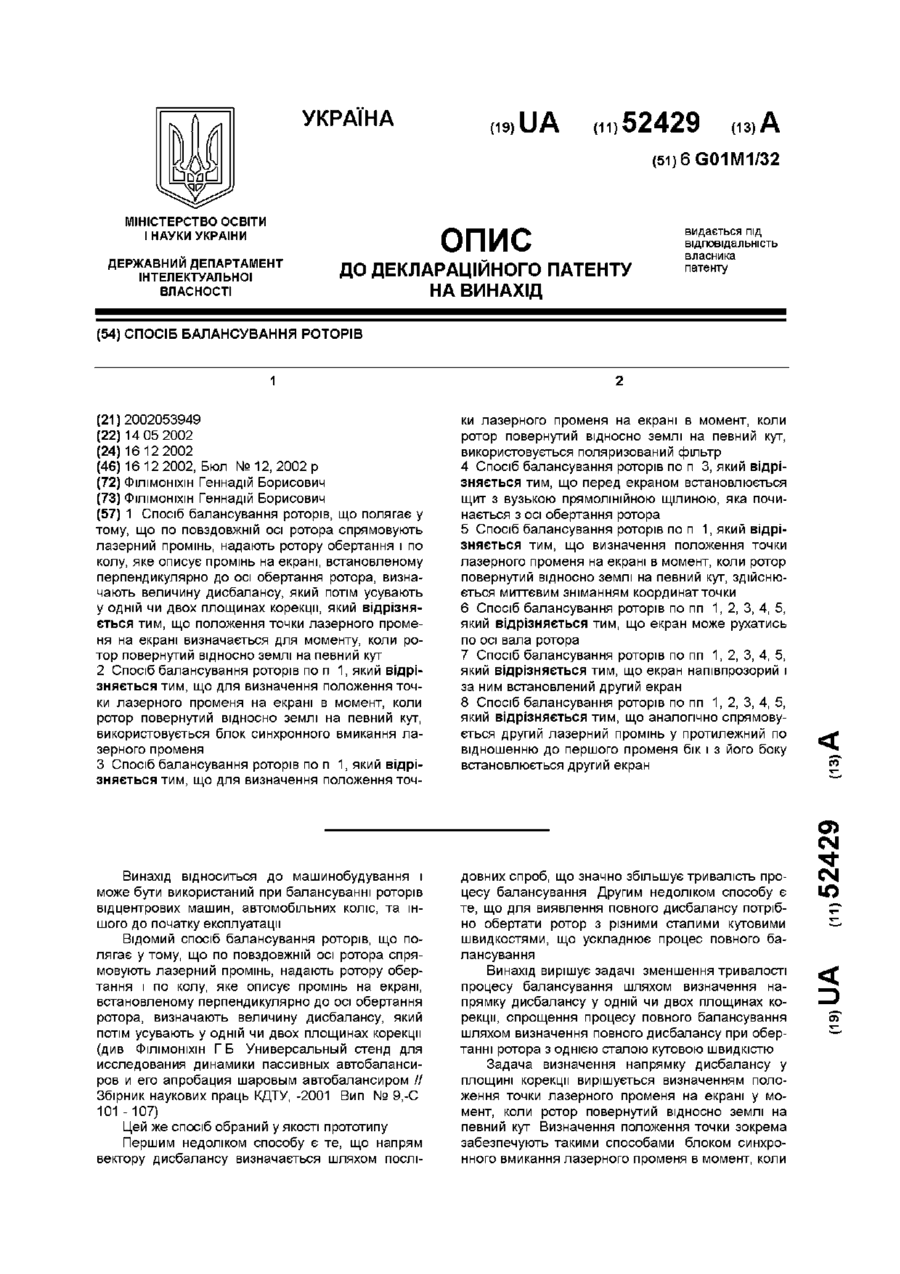
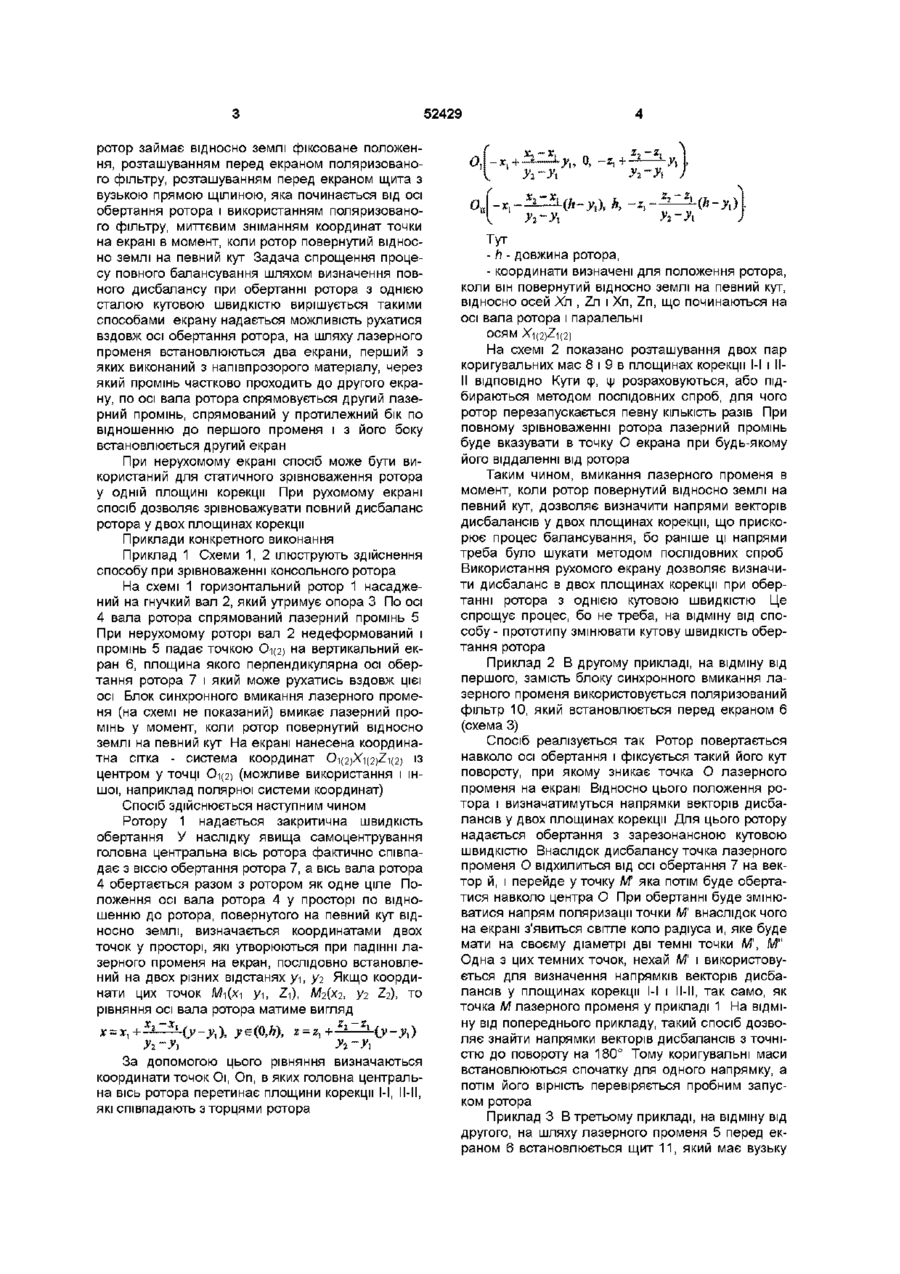
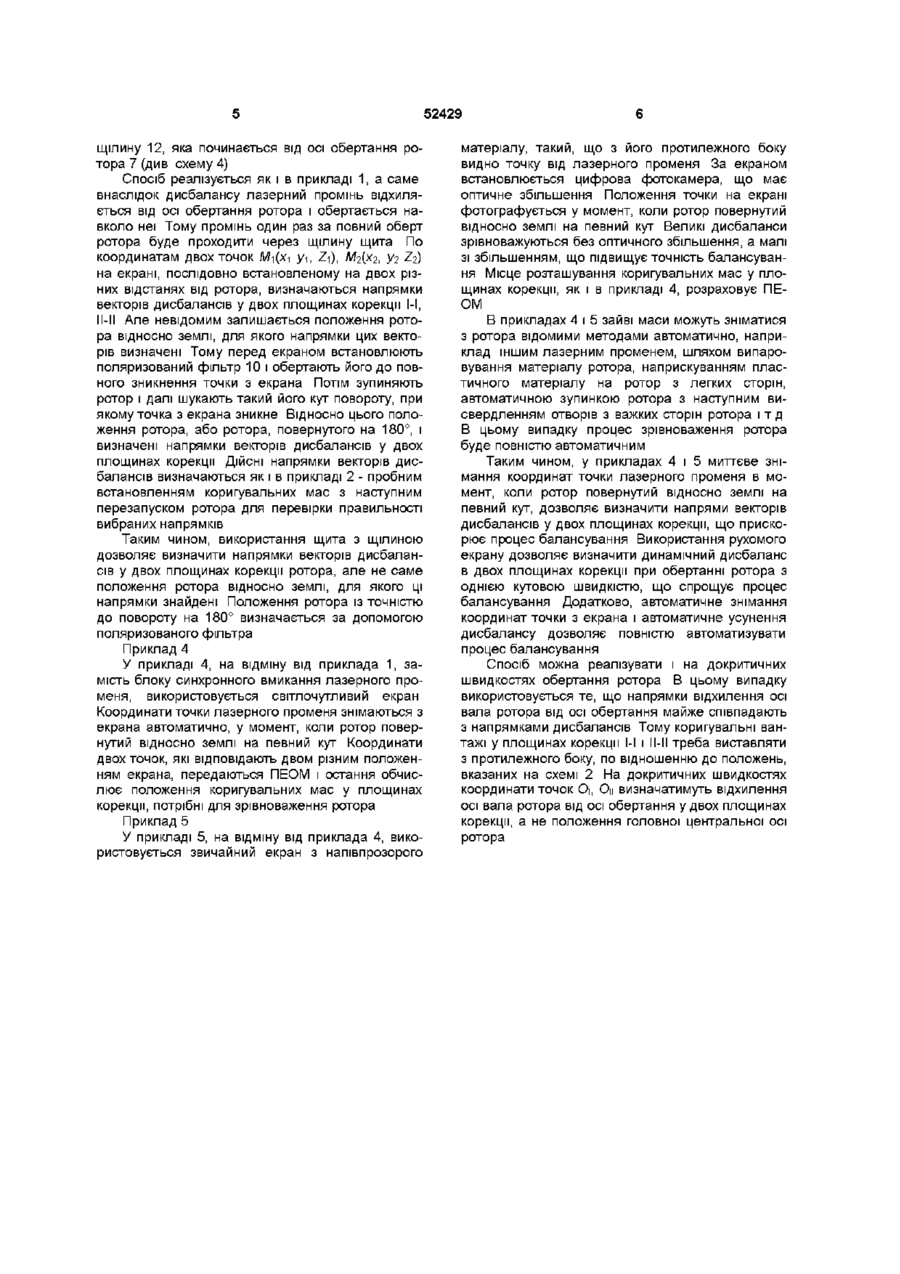
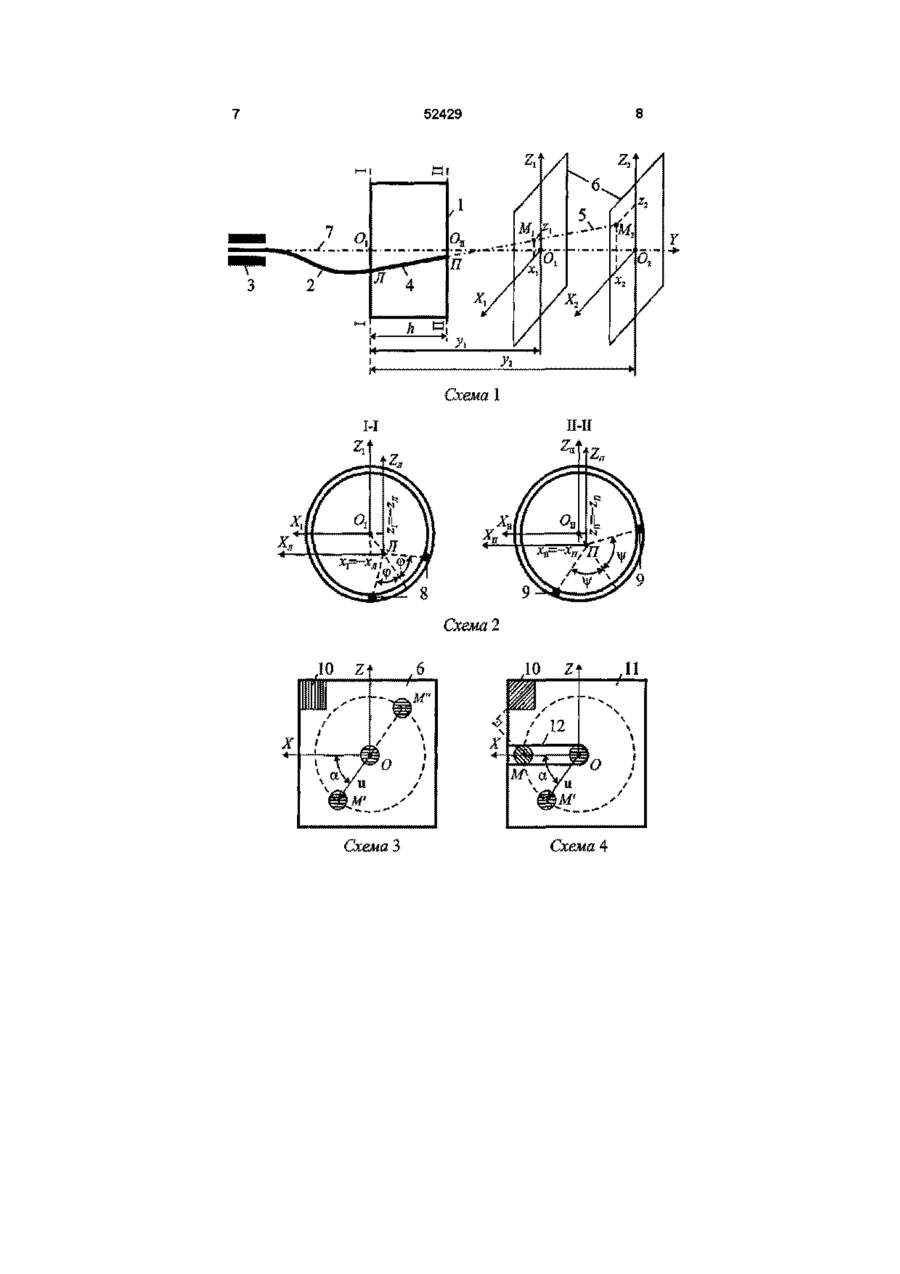
1 Спосіб балансування роторів, що полягає у тому, що по повздовжній осі ротора спрямовують лазерний промінь, надають ротору обертання і по колу, яке описує промінь на екрані, встановленому перпендикулярно до осі обертання ротора, визначають величину дисбалансу, який потім усувають у одній чи двох площинах корекції, який відрізняється тим, що положення точки лазерного променя на екрані визначається для моменту, коли ротор повернутий відносно землі на певний кут 2 Спосіб балансування роторів по п 1, який відрізняється тим, що для визначення положення точки лазерного променя на екрані в момент, коли ротор повернутий відносно землі на певний кут, використовується блок синхронного вмикання лазерного променя 3 Спосіб балансування роторів по п 1, який відрізняється тим, що для визначення положення точ ки лазерного променя на екрані в момент, коли ротор повернутий відносно землі на певний кут, використовується поляризований фільтр 4 Спосіб балансування роторів по п 3, який відрізняється тим, що перед екраном встановлюється щит з вузькою прямолінійною щілиною, яка починається з осі обертання ротора 5 Спосіб балансування роторів по п 1, який відрізняється тим, що визначення положення точки лазерного променя на екрані в момент, коли ротор повернутий відносно землі на певний кут, здійснюється миттєвим зніманням координат точки 6 Спосіб балансування роторів по пп 1, 2, 3, 4, 5, який відрізняється тим, що екран може рухатись по осі вала ротора 7 Спосіб балансування роторів по пп 1, 2, 3, 4, 5, який відрізняється тим, що екран напівпрозорий і за ним встановлений другий екран 8 Спосіб балансування роторів по пп 1, 2, 3, 4, 5, який відрізняється тим, що аналогічно спрямовується другий лазерний промінь у протилежний по відношенню до першого променя бік і з його боку встановлюється другий екран о> Винахід відноситься до машинобудування і може бути використаний при балансуванні роторів відцентрових машин, автомобільних коліс, та іншого до початку експлуатації Відомий спосіб балансування роторів, що полягає у тому, що по повздовжній осі ротора спрямовують лазерний промінь, надають ротору обертання і по колу, яке описує промінь на екрані, встановленому перпендикулярно до осі обертання ротора, визначають величину дисбалансу, який потім усувають у одній чи двох площинах корекції (див ФІЛІМОНІХІН Г Б Универсальный стенд для исследования динамики пассивных автобалансиров и его апробация шаровым автобалансиром // Збірник наукових праць КДТУ, -2001 Вип № 9,-С 101 -107) Цей же спосіб обраний у якості прототипу Першим недоліком способу є те, що напрям вектору дисбалансу визначається шляхом послі довних спроб, що значно збільшує тривалість процесу балансування Другим недоліком способу є те, що для виявлення повного дисбалансу потрібно обертати ротор з різними сталими кутовими швидкостями, що ускладнює процес повного балансування Винахід вирішує задачі зменшення тривалості процесу балансування шляхом визначення напрямку дисбалансу у одній чи двох площинах корекції, спрощення процесу повного балансування шляхом визначення повного дисбалансу при обертанні ротора з однією сталою кутовою швидкістю Задача визначення напрямку дисбалансу у площині корекції вирішується визначенням положення точки лазерного променя на екрані у момент, коли ротор повернутий відносно землі на певний кут Визначення положення точки зокрема забезпечують такими способами блоком синхронного вмикання лазерного променя в момент, коли ю 52429 ротор займає відносно землі фіксоване положення, розташуванням перед екраном поляризованого фільтру, розташуванням перед екраном щита з вузькою прямою щілиною, яка починається від осі обертання ротора і використанням поляризованого фільтру, миттєвим зніманням координат точки на екрані в момент, коли ротор повернутий відносно землі на певний кут Задача спрощення процесу повного балансування шляхом визначення повного дисбалансу при обертанні ротора з однією сталою кутовою швидкістю вирішується такими способами екрану надається можливість рухатися вздовж осі обертання ротора, на шляху лазерного променя встановлюються два екрани, перший з яких виконаний з напівпрозорого матеріалу, через який промінь частково проходить до другого екрану, по осі вала ротора спрямовується другий лазерний промінь, спрямований у протилежний бік по відношенню до першого променя і з його боку встановлюється другий екран При нерухомому екрані спосіб може бути використаний для статичного зрівноваження ротора у одній площині корекції При рухомому екрані спосіб дозволяє зрівноважувати повний дисбаланс ротора у двох площинах корекції Приклади конкретного виконання Приклад 1 Схеми 1, 2 ілюструють здійснення способу при зрівноваженні консольного ротора На схемі 1 горизонтальний ротор 1 насаджений на гнучкий вал 2, який утримує опора 3 По осі 4 вала ротора спрямований лазерний промінь 5 При нерухомому роторі вал 2 недеформований і промінь 5 падає точкою Оц2) на вертикальний екран 6, площина якого перпендикулярна осі обертання ротора 7 і який може рухатись вздовж цієї осі Блок синхронного вмикання лазерного променя (на схемі не показаний) вмикає лазерний промінь у момент, коли ротор повернутий відносно землі на певний кут На екрані нанесена координатна сітка - система координат Оц2)Хц2)їц2) із центром у точці Оц2) (можливе використання і іншої, наприклад полярної системи координат) Спосіб здійснюється наступним чином Ротору 1 надається закритична швидкість обертання У наслідку явища самоцентрування головна центральна вісь ротора фактично співпадає з віссю обертання ротора 7, а вісь вала ротора 4 обертається разом з ротором як одне ціле Положення осі вала ротора 4 у просторі по відношенню до ротора, повернутого на певний кут відносно землі, визначається координатами двох точок у просторі, які утворюються при падінні лазерного променя на екран, послідовно встановлений на двох різних відстанях )/•], у2 Якщо координати цих точок М-і(хі уі, Z-i), Мг(х2, уг Z2), то рівняння осі вала ротора матиме вигляд За допомогою цього рівняння визначаються координати точок Оі, On, в яких головна центральна вісь ротора перетинає площини корекції 1-І, 11-11, які співпадають з торцями ротора •X.+-х, -Ф-Ул\ r, У 2~ Уі Тут - h - довжина ротора, - координати визначені для положення ротора, коли він повернутий відносно землі на певний кут, відносно осей Хп , Zn 1 Хп, Zn, що починаються на осі вала ротора і паралельні ОСЯМ Xi(2)Zi(2) На схемі 2 показано розташування двох пар коригувальних мас 8 і 9 в площинах корекції 1-І і IIII ВІДПОВІДНО Кути ер, ф розраховуються, або підбираються методом послідовних спроб, для чого ротор пєрезапускається певну КІЛЬКІСТЬ разів При повному зрівноваженні ротора лазерний промінь буде вказувати в точку О екрана при будь-якому його віддаленні від ротора Таким чином, вмикання лазерного променя в момент, коли ротор повернутий відносно землі на певний кут, дозволяє визначити напрями векторів дисбаланса у двох площинах корекції, що прискорює процес балансування, бо раніше ці напрями треба було шукати методом послідовних спроб Використання рухомого екрану дозволяє визначити дисбаланс в двох площинах корекції при обертанні ротора з однією кутовою швидкістю Це спрощує процес, бо не треба, на відміну від способу - прототипу змінювати кутову швидкість обертання ротора Приклад 2 В другому прикладі, на відміну від першого, замість блоку синхронного вмикання лазерного променя використовується поляризований фільтр 10, який встановлюється перед екраном 6 (схема 3) Спосіб реалізується так Ротор повертається навколо осі обертання і фіксується такий його кут повороту, при якому зникає точка О лазерного променя на екрані Відносно цього положення ротора і визначатимуться напрямки векторів дисбалансів у двох площинах корекції Для цього ротору надається обертання з зарезонансною кутовою швидкістю Внаслідок дисбалансу точка лазерного променя О відхилиться від осі обертання 7 на вектор й, і перейде уточку № яка потім буде обертатися навколо центра О При обертанні буде змінюватися напрям поляризації точки № внаслідок чого на екрані з'явиться світле коло радіуса и, яке буде мати на своєму діаметрі дві темні точки М', М" Одна з цих темних точок, нехай М' і використовується для визначення напрямків векторів дисбалансів у площинах корекції 1-І і 11-11, так само, як точка М лазерного променя у прикладі 1 На відміну від попереднього прикладу, такий спосіб дозволяє знайти напрямки векторів дисбаланса з точністю до повороту на 180° Тому коригувальні маси встановлюються спочатку для одного напрямку, а потім його вірність перевіряється пробним запуском ротора Приклад З В третьому прикладі, на відміну від другого, на шляху лазерного променя 5 перед екраном 6 встановлюється щит 11, який має вузьку 52429 щілину 12, яка починається від осі обертання ротора 7 (див схему 4) Спосіб реалізується як і в прикладі 1, а саме внаслідок дисбалансу лазерний промінь відхиляється від осі обертання ротора і обертається навколо неї Тому промінь один раз за повний оберт ротора буде проходити через щілину щита Покоординатам двох точок М-і(хі уі, Z-i), М2(Х2, уг Zi) на екрані, послідовно встановленому на двох різних відстанях від ротора, визначаються напрямки векторів дисбаланса у двох площинах корекції 1-І, 1 - 1 Але невідомим залишається положення рото11 ра відносно землі, для якого напрямки цих векторів визначені Тому перед екраном встановлюють поляризований фільтр 10 і обертають його до повного зникнення точки з екрана Потім зупиняють ротор і далі шукають такий його кут повороту, при якому точка з екрана зникне Відносно цього положення ротора, або ротора, повернутого на 180°, і визначені напрямки векторів дисбаланса у двох площинах корекції ДІЙСНІ напрямки векторів дисбалансів визначаються як і в прикладі 2 - пробним встановленням коригувальних мас з наступним перезапуском ротора для перевірки правильності вибраних напрямків Таким чином, використання щита з щілиною дозволяє визначити напрямки векторів дисбалансів у двох площинах корекції ротора, але не саме положення ротора відносно землі, для якого ці напрямки знайдені Положення ротора із точністю до повороту на 180° визначається за допомогою поляризованого фільтра Приклад 4 У прикладі 4, на відміну від приклада 1, замість блоку синхронного вмикання лазерного променя, використовується світлочутливий екран Координати точки лазерного променя знімаються з екрана автоматично, у момент, коли ротор повернутий відносно землі на певний кут Координати двох точок, які відповідають двом різним положенням екрана, передаються ПЕОМ і остання обчислює положення коригувальних мас у площинах корекції, потрібні для зрівноваження ротора Приклад 5 У прикладі 5, на відміну від приклада 4, використовується звичайний екран з напівпрозорого матеріалу, такий, що з його протилежного боку видно точку від лазерного променя За екраном встановлюється цифрова фотокамера, що має оптичне збільшення Положення точки на екрані фотографується у момент, коли ротор повернутий відносно землі на певний кут Великі дисбаланси зрівноважуються без оптичного збільшення, а малі зі збільшенням, що підвищує точність балансування Місце розташування коригувальних мас у площинах корекції, як і в прикладі 4, розраховує ПЕОМ В прикладах 4 і 5 зайві маси можуть зніматися з ротора відомими методами автоматично, наприклад іншим лазерним променем, шляхом випаровування матеріалу ротора, наприскуванням пластичного матеріалу на ротор з легких сторін, автоматичною зупинкою ротора з наступним висвердленням отворів з важких сторін ротора і т д В цьому випадку процес зрівноваження ротора буде повністю автоматичним Таким чином, у прикладах 4 і 5 миттєве знімання координат точки лазерного променя в момент, коли ротор повернутий відносно землі на певний кут, дозволяє визначити напрями векторів дисбаланса у двох площинах корекції, що прискорює процес балансування Використання рухомого екрану дозволяє визначити динамічний дисбаланс в двох площинах корекції при обертанні ротора з однією кутовою швидкістю, що спрощує процес балансування Додатково, автоматичне знімання координат точки з екрана і автоматичне усунення дисбалансу дозволяє повністю автоматизувати процес балансування Спосіб можна реалізувати і на докритичних швидкостях обертання ротора В цьому випадку використовується те, що напрямки відхилення осі вала ротора від осі обертання майже співпадають з напрямками дисбаланса Тому коригувальні вантажі у площинах корекції 1-І і 1 - 1 треба виставляти 11 з протилежного боку, по відношенню до положень, вказаних на схемі 2 На докритичних швидкостях координати точок О\, Оц визначатимуть відхилення осі вала ротора від осі обертання у двох площинах корекції, а не положення головної центральної осі ротора 52429 Схема 1 Схема 2 ш / 1/ ДО Z ,11 It*" / X V \ •^—щ* л і1 / у ІД ® Схема 3 — Сеема 1 *
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for balancing a rotor
Автори англійськоюFilimonikhin Hennadiy Borysovych
Назва патенту російськоюСпособ балансировки ротора
Автори російськоюФилимонихин Геннадий Борисович
МПК / Мітки
МПК: G01M 1/32, G01N 21/00
Мітки: роторів, спосіб, балансування
Код посилання
<a href="https://ua.patents.su/4-52429-sposib-balansuvannya-rotoriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб балансування роторів</a>
Спосіб балансування жорстких роторів
Номер патенту: 22692
Опубліковано: 07.04.1998
Автори: Муслімов Дмитро Олександрович, Єрошин Сергій Сергійович
МПК: G01M 1/30, G01M 1/14, G01M 1/38
Мітки: роторів, балансування, жорстких, спосіб
Формула / Реферат:
1. Способ балансировки жестких роторов, состоящий в установке ротора на шпиндель, имеющий измерительные опоры, преобразующие динамические реакции, вызванные дисбалансом, в электрические сигналы; в выборе из постоянного запоминающего устройства информации, соответствующей геометрическим параметрам балансируемого ротора; в автоматическом вводе этой информации в измерительно-вычислительную систему (ИВС), предварительно настроенную аппаратными...
Верстат для динамічного балансування вертикальних роторів
Номер патенту: 18499
Опубліковано: 25.12.1997
Автори: Гавріков Андрій Віталійович, Новиков Ігорь Анатолійович
МПК: G01M 1/04
Мітки: балансування, роторів, вертикальних, динамічного, верстат
Формула / Реферат:
Станок для динамической балансировки вертикальных роторов, содержащий станину, связанную с ней упругими вертикальной и горизонтальной связями колебательную систему рабочего органа, отличающийся тем, что вертикальная связь выполнена в виде пластины, жесткость которой меньше жесткости горизонтальных связей в 5 - 10 раз.
Пристрій для автоматичного балансування
Номер патенту: 50229
Опубліковано: 15.10.2002
Автор: Сахно Євгеній Юрійович
МПК: B23B 19/00
Мітки: балансування, пристрій, автоматичного
Формула / Реферат:
Пристрій для автоматичного балансування, що містить дві площини корекції, які розташовані всередині шпиндельної бабки, і в яких містяться корегуючі диски, пристрої фіксації корегуючих дисків відносно шпинделя та привід повороту корегуючих дисків в положення компенсації технологічного дисбалансу, який відрізняється тим, що одна площина корекції розташована всередині шпиндельної бабки між передньою та задньою опорою, а друга на консолі шпинделя...
Пристрій для вимірювання дисбалансу роторів
Номер патенту: 48759
Опубліковано: 15.08.2002
Автори: Білинський Йосип Йосипович, Кухарчук Василь Васильович, Білинська Марина Йосипівна
МПК: G01M 1/22
Мітки: вимірювання, пристрій, дисбалансу, роторів
Формула / Реферат:
Пристрій для вимірювання дисбалансу ротора, що містить освітлювальну систему, яка складається з оптичного квантового генератора з об'єктивом, призначеного для освітлення поверхні ротора, і обчислювач, який відрізняється тим, що в нього введені і послідовно розташовані лінза, фотоприймальна матриця, а як обчислювач використано обчислювальний пристрій.
Спосіб балансування автомобільних колес та пристрій для його здійснення
Номер патенту: 39680
Опубліковано: 15.06.2001
Автори: Борщ Євген Григорович, Беліков Валерій Григорійович, Христофоров Валерій Георгійович, Катчук Анатолій Миколайович, Смоловік Олександр Олександровіч
Мітки: пристрій, автомобільних, балансування, здійснення, колес, спосіб
Формула / Реферат:
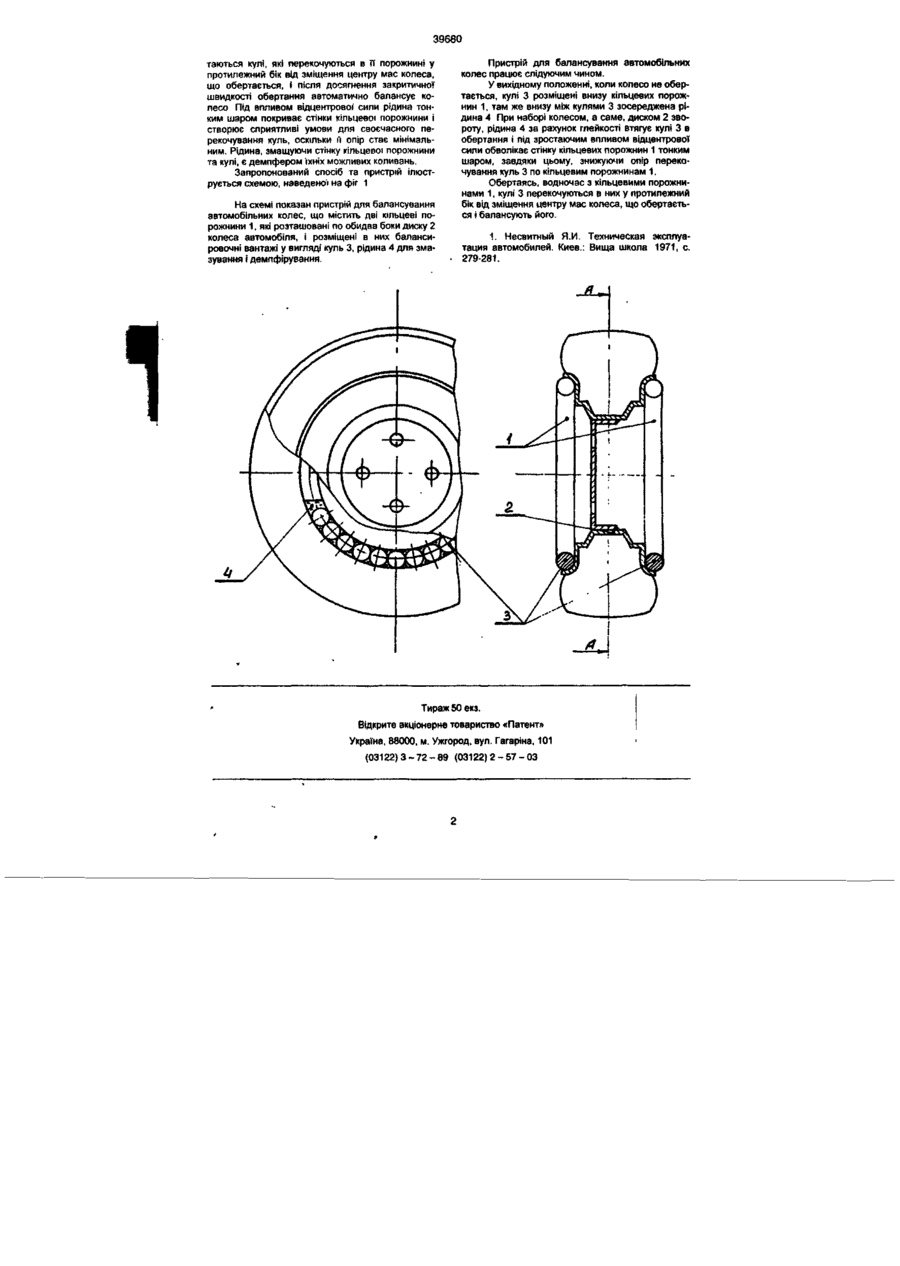
1. Спосіб балансування автомобільних коліс, що включає вплив балансувальних вантажів певної ваги у певному місці на колесо автомобіля, який відрізняється тим, що під час руху автомобіля балансувальні вантажі автоматично визначають свою вагу та місце розташування на колесі автомобіля.2. Пристрій для балансування автомобільних коліс, що містить балансувальні вантажі, скоби кріплення їх до диска колеса автомобіля, який відрізняється тим,...
Попередній патент: Пристрій для упорядкування системи різнорідних елементів
Наступний патент: Автобалансуючий пристрій
Випадковий патент: Спосіб одержання заліза і відновний реактор в.в.бодрова-в.і.костюченка