Спосіб балансування жорстких роторів
Номер патенту: 22692
Опубліковано: 07.04.1998
Автори: Муслімов Дмитро Олександрович, Єрошин Сергій Сергійович
Формула / Реферат
1. Способ балансировки жестких роторов, состоящий в установке ротора на шпиндель, имеющий измерительные опоры, преобразующие динамические реакции, вызванные дисбалансом, в электрические сигналы; в выборе из постоянного запоминающего устройства информации, соответствующей геометрическим параметрам балансируемого ротора; в автоматическом вводе этой информации в измерительно-вычислительную систему (ИВС), предварительно настроенную аппаратными средствами по аттестованному ротору в заводских условиях; в раскручивании ротора до частоты вращения, определенной при настройке; автоматическом измерении сигналов с опор ротора; вычислении и выводе на показывающее устройство параметров дисбаланса, отличающийся тем, что для расширения номенклатуры балансируемых роторов, повышения производительности и точности процесса балансировки, настройку устройства на ротор нового типа производит сам пользователь в условиях эксплуатации путем четырех последовательных пусков устройства с закрепленным на нем ротором выбранного типа, имеющим произвольный начальный дисбаланс, причем в первом пуске ИВС измеряет и запоминает сигналы с опор шпинделя на начальный дисбаланс; затем в обе плоскости коррекции устанавливают по грузу известной массы так, чтобы они при вращении образовывали момент сил, лежащий в плоскости, от которой производят отсчет фазовых углов дисбаланса и выполняют второй пуск с измерением и запоминанием сигналов с опор; перед третьим пуском с ротора снимают один груз, например, второй, создавая при вращении векторную нагрузку в первой плоскости коррекции производят пуск замер и запоминание сигналов с опор; перед четвертым пуском ранее снятый груз возвращают на прежнее место, другой груз снимают, создавая при вращении векторную нагрузку во второй плоскости коррекции, производя пуск, замер и запоминание сигналов с опор; при этом в ЭНОЗУ формируют базу данных корректирующих коэффициентов, учитывающих геометрические и кинематические параметры настраиваемого ротора, по которым производят амплитудную и фазовую коррекции сигналов, после чего ИВС вычисляет параметры дисбаланса по уравнениям статического равновесия,
2. Способ балансировки жестких роторов по п. 1, отличающийся тем, что линейные искажения компенсируют путем умножения сигналов одной из опор, например, второй, на коэффициент, равный отношению приращений сигналов с первой и второй опор, вызванных моментной нагрузкой на втором пуске; фазовые искажения компенсируют путем суммирования фазовых углов сигналов с углами между соответствующими реакциями и сигналами, вызванными приращениями векторной нагрузки на третьем и четвертом пусках.
Текст
Изобретение относится к области балансировочной техники и может быть использовано как для динамической балансировки жестких роторов, например, автомобильных колес, роторов электродвигателей, рабочих колес центробежных насосов и т.п., так и при изготовлении станков для выполнения этой операции. Известен способ [Основы балансировочной техники. -Т.1 -Под ред.проф. В.А.Щепетильникова. М., "Машиностроение", 1975, 528 с ] динамической двухплоскостной балансировки таких роторов, выполняемых на балансировочных станках с неподвижной осью вращения ротора, заключающийся в приведении ротора во вращательное движение с заданной частотой; в измерении сигналов с датчиков опор, которые должны быть пропорциональны величинам реакций этих Опор на динамические нагрузки, вызванные дисбалансом; во вводе геометрических параметров ротора (расстояния между плоскостями коррекции, положения этих плоскостей относительно измерительных опор стенда и величины радиуса расположения корректирующих грузов); в расчете параметров дисбаланса (масс корректирующих грузов и полярных углов их установки) по реакциям опор и геометрическим параметрам ротора с помощью уравнений статического равновесия; в индикации результатов Вычислений и установке корректирующих грузов в соответствии с полученным результатом, Такой способ реализован в станке балансировочном В300 {Украинский автомобильный журнал "Сигнал", № 6, 1993], который принят в качестве аналога. Аналог имеет следующие недостатки; низкую производительность за счет потерь времени, необходимого на измерение геометрических параметров ротора; необходимость применения измерительных средств для замера геометрических параметров ротора (встроенной линейки для измерения расстояния от опоры до ближайшей плоскости коррекции, кронциркуля для измерения расстояния между плоскостями коррекций и линейки для измерения радиуса расположения корректирующих грузов); недостаточную точность определения дисбаланса, обусловленную взаимным влиянием измерительных каналов. Наиболее близким техническим решением, выбранным в качестве прототипа, является способ, реализованный в устройстве балансировки колес легковых автомобилей УБКА-Л, состоящий в установке ротора на шпиндель, имеющий измерительные опоры, преобразующие динамические реакции вызванные дисбалансом в электрические сигналы, в выборе из постоянного запоминающего устройства информации, соответствующей геометрическим параметрам балансируемого ротора; в автоматическом вводе этой информации в измерительно-вычислительную систему, предварительно настроенную аппаратными средствами по аттестованному ротору в заводских условиях; в раскручивании ротора до частоты вращения, определенной при настройке; автоматическом измерении сигналов с опор ротора; вычислении и выводе на показывающее устройство параметров дисбаланса. Недостатком известного способа является ограничение номенклатуры балансируемых роторов, так как устройства, реализующие этот способ, настраивают на заводе-изготовителе аппаратными средствами на определенное число роторов (например, в прототипе их восемь). В процессе эксплуатации балансировочных станков (как аналога, так и прототипа) происходят нарушения в настройке, связанные с изменением чувствительности датчиков сил, амплитудно-частотных каналов, моментов сопротивлений в подшипниках и т.п. Если в процессе эксплуатации не проводить настройку, то со временем происходит снижение точности и, как следствие, к потере производительности, так как для достижения желаемого результата нужно многократно повторять измерительные пуски, В основу изобретения поставлена задача, которая состоит в расширении номенклатуры балансируемых роторов, повышении производительности и точности процесса балансировки. Поставленная задача достигается тем, что в способе балансировки жестких роторов, состоящем в установке ротора на балансировочном устройстве"в измерительные опоры, преобразующие динамические реакции, вызванные дисбалансом, в сигналы, пропорциональные этим реакциям; в выборе из постоянного запоминающего устройства (ПЗУ) информации, соответствующей геометрическим параметрам балансируемого ротора, если балансировочное устройство ранее на этот тип ротора было настроено; в автоматическом вводе этой информации в измерительно-вычислительную систему (ИВС), выполненную на базе микро-ЭВМ; в раскручивании ротора до частоты вращения, определенной при настройке; автоматическом измерении сигналов с опор ротора; вычислении и выводе на показывающее устройство параметров дисбаланса, Если измерительно-вычислительная система ранее на этот тип ротора не настраивалась, то согласно изобретению необходимо провести настройку. Настройку производит сам пользователь в условиях эксплуатации путем четырех последовательных пусков устройства с закрепленным на нем ротором выбранного типа, имеющим произвольный начальный дисбаланс На первом пуске ИВС измеряет и запоминает сигналы с опор шпинделя, вызванные начальным дисбалансом ротора. Перед вторым пуском на ротор в выбранные плоскости коррекции устанавливают два груза известной массы так, чтобы при вращении они образовывали момент сил, лежащий в плоскости, от которой производят отсчет фазовых углов дисбаланса Производят второй, пуск, измеряют и запоминают сигналы опор, вызванные начальным дисбалансом и добавленным моментом, который известен по величине и направлению. Перед пуском с ротора снимают один из ранее установленных грузов (например, второй), создавая оставшимся грузом векторную нагрузку, известную по величине и направлению. Вращая ротор на заданной частоте, измеряют и запоминают сигналы опор, вызванные начальным дисбалансом и добавленной векторной нагрузкой. Перед четвертым пуском ранее снятый груз возвращают на прежнее место, другой груз снимают, создавая при этом векторную нагрузку во второй Плоскости коррекции. Производят пуск, замер и запоминание сигналов с опор. По результатам пробных пусков в энергонезависимом оперативном запоминающем устройстве (ЭНОЗУ) автоматически формируют базу данных корректирующих коэффициентов, учитывающих геометрические и кинематические параметры настраиваемого ротора. Затем проводят амплитудную и фазовую коррекции сигналов, добиваясь их подобия с реакциями опор, и по уравнениям статического равновесия определяют параметры дисбаланса. Линейные искажения компенсируют путем умножения сигналов одной из опор, например, второй, на коэффициент, равный отношению приращений сигналов с первой и второй опор, вызванных моментной нагрузкой на втором пуске. Фазовые искажения компенсируют путем суммирования фазовых углов сигналов с углами между соответствующими реакциями и сигналами, вызванными приращениями векторной нагрузки на третьем и четвертом пусках Предлагаемый способ реализован в стенде для балансировки автомобильных колес модели ПЭМ 217. Стенд включает в себя механизм вращения и измерительно-вычислительный блок Механизм вращения имеет шпиндель, закрепленный на двух измерительных опорах, датчик угла поворота и частоты вращения, механизм зажима колеса Измерительно-вычислительный блок, собранный на однокристальном микроконтроллере серии 1816ВЄ51, имеет два аналоговых входа, к которым подключены пьезоэлектрические датчики измерительных опор, датчик угла поворота и частоты вращения, однострочный дисплей и две кнопки управления. Кнопки управления включены в электронную схему так, что с помощью одной из них производится выбор режима или индикации, а второй - подтверждение выбора. В стенде ПЭМ 217 предусмотрены следующие режимы работы и индикации: выбор типа колеса, расчет параметров дисбаланса, "обучение", индикация остаточного дисбаланса или нулей, если он менее 8 грамм, тестирование аналого-цифрового преобразователя, датчика угла поворота и частоты вращения, резервного источника питания ЭНЗУ и пр. В стенде ПЭМ 217 предусмотрена балансировка на частотах 140,100 и 60 оборотов в минуту, что дает возможность определять дисбаланс до 200, 400 и 999 г соответственно, Стенд ПЭМ 217 имеет ЭНОЗУ, предназначенное для хранения информации о настройке стенда на двадцать типов колес. База данных по типам колес частично создается изготовителем, а затем, при необходимости, дополняется или корректируется пользователем. Причем для настройки стенда на новый тип колеса или перенастройки на уже существующий не требуется иметь аттестованное колесо. Стенд работает следующим образом. Если нужно отбалансировать колесо, информация о котором уже имеется в ЭНОЗУ микро-ЭВМ, то для определения параметров дисбаланса необходимо закрепить колесо на шпинделе, с помощью кнопок управления выбрать необходимый тип колеса и сделать пуск. После чего микро-ЭВМ производит автоматический замер, вычисление и индикацию параметров дисбаланса. Для настройки стенда на новый тип колеса последнее, очищенное от грязи и ранее установленных грузов, необходимо закрепить на стенде, с помощью кнопок управления войти в режим "обучение" и произвести четыре пробных пуска настройки. На первом пуске ИВС измеряет и запоминает сигналы с опор шпинделя, вызванные начальным дисбалансом колеса. Перед вторым пуском в плоскости коррекции колеса устанавливают пробные грузы массой 75 грамм так, чтобы они образовывали при вращении момент сил. Для этого в первой плоскости коррекции пробный груз должен иметь фазовый угол 0°, а во второй -180°. Из сигналов, полученных на втором пуске, соответственно вычитают сигналы первого пуска, получая при этом приращения, вызванные действием только моментной нагрузки. Известно [Воронков И.М. Курс теоретической механики. М„ Наука, 1964, 698 с], что при действии на двухопорную балку момента сил, реакции опор равны πα величине и противоположны по направлению. Однако, полученные ранее приращения сигналов, В силу взаимного влияния oпop, не равны между собой. Поэтому, по результатам второго пуска вычисляют отношение приращений сигналов, которое в дальнейших расчетах используют в качестве поправочного коэффициента на амплитуду одного из них, В частности, если определяется отношение сигнала первой опоры ко второй, то для компенсации линейных искажений, в дальнейших расчетах сигнал второй опоры умножают на это отношение. Перед третьим пуском с колеса снимают груз с первой плоскости коррекции и проводят пуск, измеряя сигналы с опор. Затем определяют амплитуды и фазы этих сигналов и проводят векторное вычитание сигналов первого пуска, получая приращения, вызванные векторной нагрузкой. Известно [21, что в этом случае реакции опор и внешняя нагрузка должны лежать водной плоскости, чего в силу взаимного влияния опор нет на практике. По этому вычисляют разность углов между реакциями опор им соответствующими сигналами, которые запоминают в ЭНОЗУ. В дальнейших расчетах эти разности, представляющие собой фазовые искажения, прибавляют к фазовым углам соответствующих сигналов. Четвертый пуск аналогичен третьему с той лишь разницей, что он выполняется с грузом, установленным в первой плоскости коррекции. По результатам последних двух пусков проводят амплитудную и фазовую корректировку сигналов, получая подобие между сигналами и реакциями опор, и решают, обратную задачу статического равновесия [Воронков И.М, Курс теоретической механики. -М„ Наука 1964.598 с], то есть по известным внешним нагрузкам, реакциям опори расстоянию между опорами, которое для конкретного стенда достоверно известно и не меняется, определяют геометрические параметры балансируемого колеса, которые заносят в ЭНОЗУ. В дальнейшем при балансировке колес такого типа пользуются данными, имеющимися в ЭНОЗУ. Испытания, проведенные в условиях станций техобслуживания, показали, что по сравнению с аналогом, время определения дисбаланса автомобильного колеса типа ВАЗ-2101 уменьшилось в среднем на три минуты, что увеличивает производительность на 25%. По сравнению с прототипом номенклатура балансируемых колее не имеет ограничений. Стенд может быть настроен на любое колесо и на любой способ крепления корректирующих грузов. Благодаря наличию режима "обучение" повышается надежность и точность работы стенда, что дает возможность уверенно проводить балансировку колес с точностью до одного
ДивитисяДодаткова інформація
Автори англійськоюYeroshyn Serhii Serhiiovych
Автори російськоюЕрошин Сергей Сергеевич
МПК / Мітки
МПК: G01M 1/38, G01M 1/14, G01M 1/30
Мітки: жорстких, спосіб, роторів, балансування
Код посилання
<a href="https://ua.patents.su/2-22692-sposib-balansuvannya-zhorstkikh-rotoriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб балансування жорстких роторів</a>
Верстат для динамічного балансування вертикальних роторів
Номер патенту: 18499
Опубліковано: 25.12.1997
Автори: Гавріков Андрій Віталійович, Новиков Ігорь Анатолійович
МПК: G01M 1/04
Мітки: роторів, вертикальних, динамічного, верстат, балансування
Формула / Реферат:
Станок для динамической балансировки вертикальных роторов, содержащий станину, связанную с ней упругими вертикальной и горизонтальной связями колебательную систему рабочего органа, отличающийся тем, что вертикальная связь выполнена в виде пластины, жесткость которой меньше жесткости горизонтальных связей в 5 - 10 раз.
Пристрій для вимірювання дисбалансу роторів
Номер патенту: 14600
Опубліковано: 20.01.1997
Автор: Бєломестнов Валерій Іванович
Мітки: пристрій, вимірювання, роторів, дисбалансу
Формула / Реферат:
Устройство для измерения дисбаланса роторов, содержащее датчики дисбаланса, блок исключения влияния плоскостей коррекции, входы которого связаны с датчиками дисбаланса, избирательный усилитель, блок анализа и индикации параметров дисбаланса, датчик опорного сигнала, формирователь-умножитель, вход которого связан с датчиком опорного сигнала, а выход с избирательным усилителем, отличающееся тем, что оно снабжено мультиплексным...
Спосіб визначення дисбалансу роторів та пристрій для його здійснення
Номер патенту: 2745
Опубліковано: 26.12.1994
Автори: Єфремов Володимир Борисович, Остріченко Сергій Федорович
МПК: G01M 1/22
Мітки: пристрій, визначення, спосіб, здійснення, роторів, дисбалансу
Формула / Реферат:
1. Способ определения дисбаланса роторов, заключающийся в том, что приводят ротор во вращение, фиксируют его радиальные перемещения в течение одного полуоборота дважды со сдвигом 90° и определяют амплитуду и фазу дисбаланса, отличающийся тем, что, с целью расширения частотного диапазона и повышения безаварийности, предварительно на ротор наносят две метки со сдвигом 90°, компенсируют некруглость ротора и при вращении на любой частоте...
Спосіб визначення параметрів вектору дисбалансу роторів та пристрій для його здійснення

Номер патенту: 2744
Опубліковано: 26.12.1994
Автори: Прилуцький Валерій Львович, Савченко Лідія Михайлівна, Єфремов Володимир Борисович, Муравський Аркадій Миколайович, Добровольський Геннадій Георгійович
МПК: G01M 1/22
Мітки: роторів, дисбалансу, спосіб, пристрій, визначення, здійснення, параметрів, вектору
Формула / Реферат:
1. Способ определения параметров вектора дисбаланса роторов, заключающийся в том, что по окружности ротора наносят равноудаленные метки, одну из которых принимают за нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, отличающийся тем, что, с целью повышения точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с моментом перехода сигнала сдатчика...
Верстат для динамічного балансування гранувальних дисків
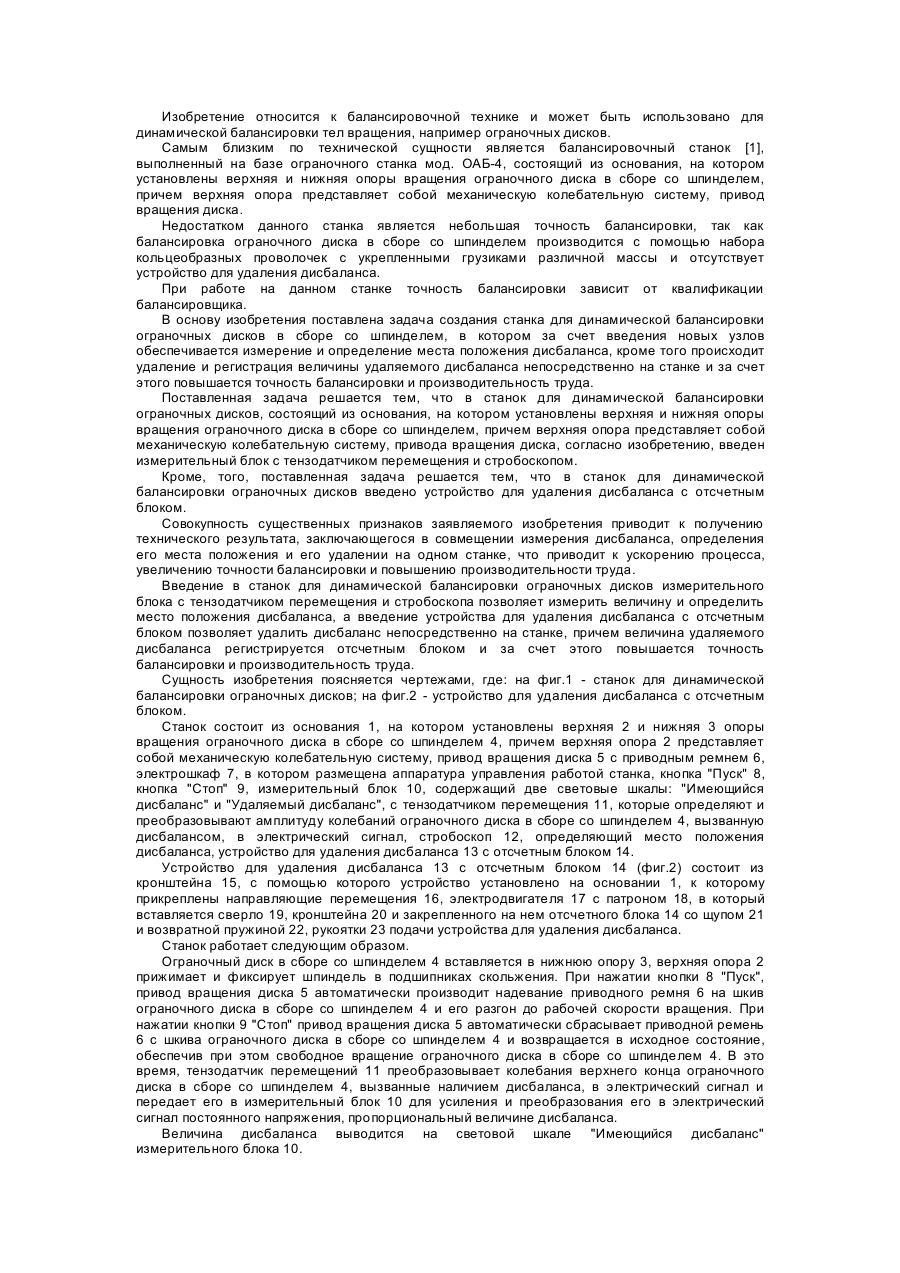
Номер патенту: 9632
Опубліковано: 30.09.1996
Автори: Папінов Володимир Миколайович, Пузанов Геннадій Михайлович
Мітки: динамічного, дисків, балансування, верстат, гранувальних
Формула / Реферат:
Станок для динамической балансировки ограночных дисков, состоящий из основания, на котором установлены верхняя и нижняя опоры вращения ограничного диска в сборе со шпинделем и привод вращения, причем верхняя опора выполнена в виде механической колебательной системы, отличающийся тем, что станок содержит измерительный блок с тензодатчиком перемещения и стробоскопом и устройство удаления дисбаланса с отсчетным блоком.