Спосіб керування багатовимірним динамічним об’єктом
Номер патенту: 53614
Опубліковано: 11.10.2010
Автори: Тимченко Віктор Леонідович, Кукліна Катерина Олексіївна, Кондратенко Юрій Пантелійович

Формула / Реферат
Спосіб керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні управляючого впливу на основі результатів порівняння задавального впливу та суми значень виміряних змінних стану об'єкта, яка доповнена значеннями змінних, виміряних безпосередньо за межами прикладення впливів, який відрізняється тим, що у блоці визначення моментів перемикань ключів апріорно розраховують моменти часу перемикання ключів у ланцюгах зворотного зв'язку, з виходу об'єкта керування подають багатовимірний сигнал змінних стану на один з ланцюгів зворотного зв'язку, після чого на суматорі першої групи підсумовують один з вихідних багатовимірних сигналів блока задання начального керуючого впливу та одного з матричних блоків підсилювання, в залежності від того, який конкретно ключ у даний момент часу замкнуто, підсумований вплив подають на динамічні ланки, вихідні багатовимірні сигнали яких підсумовують на суматорі другої групи з впливом, який надходить з датчика контролю зовнішнього збурення через блок підсилювання зовнішнього збурення, далі підсумований багатовимірний сигнал подають на вхід блока контролю перемикань ключів, на виході якого формують керуючий вплив, який подають на вхід об'єкта керування.
Текст
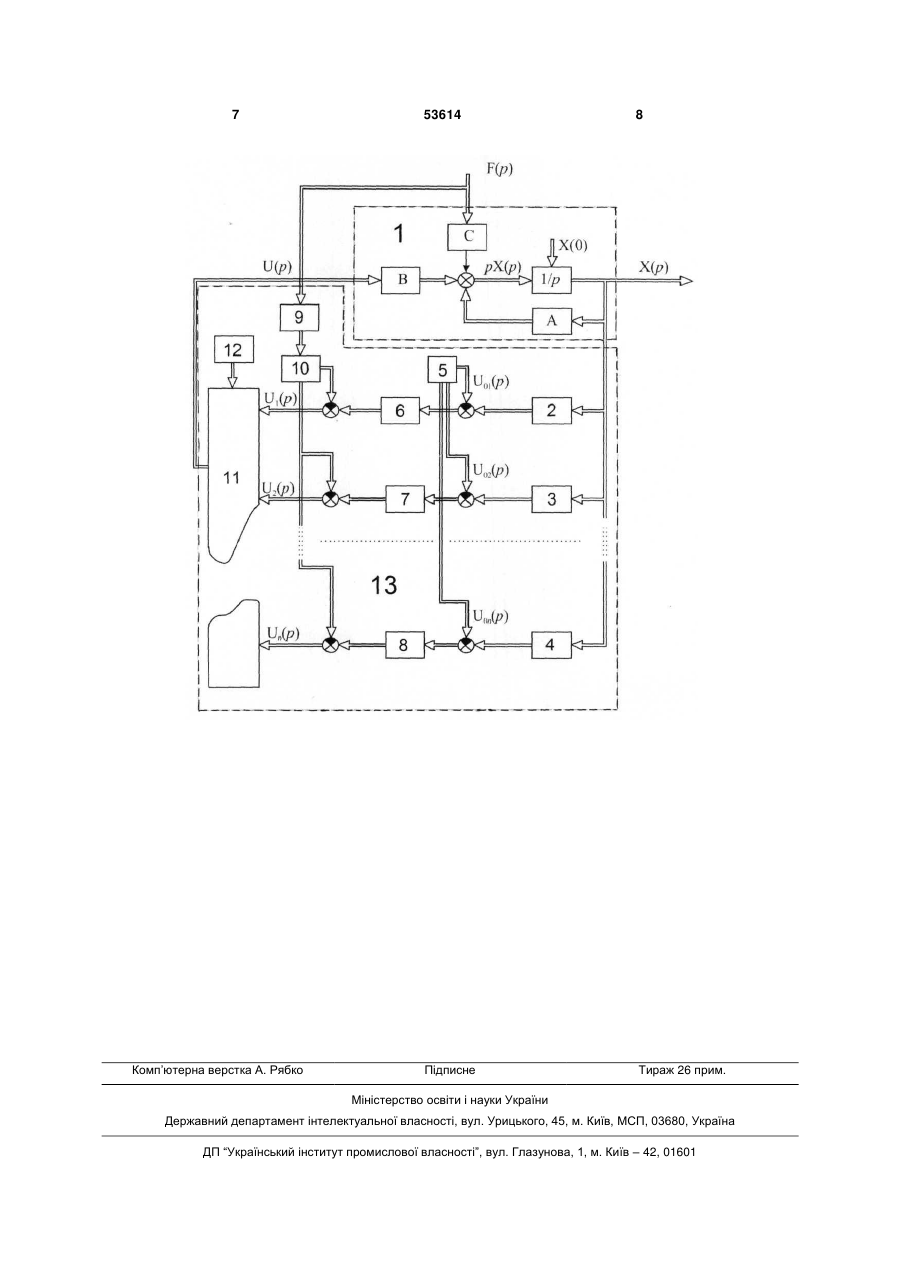
Спосіб керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні управляючого впливу на основі результатів порівняння задавального впливу та суми значень виміряних змінних стану об'єкта, яка доповнена значеннями змінних, виміряних безпосередньо за межами прикладення впливів, який відрізняється тим, що у блоці визначення моментів перемикань ключів апріорно розраховують моменти часу пе 3 приводить до зниження швидкодії всієї системи. Високий ступінь зв'язності координат стану об'єкта ускладнює реалізацію принципу підкореневого регулювання. За прототип прийнято спосіб керування динамічними об'єктами по заданих показниках якості (патент Російської Федерації № 2261466 від 05.05.2003), який полягає у формуванні управляючого впливу на основі результатів порівняння задаючого впливу та суми значень виміряних змінних стану об'єкта, яка доповнена значеннями змінних, виміряних безпосередньо за межами прикладення впливів. При неможливості вимірювання змінних стану, керуючий вплив формується на основі результатів порівняння задаючого впливу та суми значень, виміряних за межами прикладення сигналів підстроювання спостерігача стану, але при використанні способу керування динамічними об'єктами по заданих показниках якості неможлива побудова заданої траєкторії руху та необхідне вимірювання додаткової кількості змінних стану динамічної системи. В основу корисної моделі поставлено задачу удосконалення способу керування багатовимірним динамічним об'єктом за принципом розв'язування задач побудови заданих фазових траєкторій для різних видів граничних умов, що дозволяє оптимізувати проходження об'єкта по розрахованій траєкторії, виходячи із економічних та енергетичних аспектів. Поставлена задача вирішується тим, що: Спосіб керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні управляючого впливу на основі результатів порівняння задаючого впливу та суми значень виміряних змінних стану об'єкта, яка доповнена значеннями змінних, виміряних безпосередньо за межами прикладення впливів, який відрізняється тим, що у блоці визначення моментів перемикань ключів апріорно розраховують моменти часу перемикання ключів у ланцюгах зворотного зв'язку, з виходу об'єкта керування подають багатовимірний сигнал змінних стану на один з ланцюгів зворотного зв'язку, після чого на суматорі першої групи підсумовують один з вихідних багатовимірних сигналів блоку завдання начального керуючого впливу та одного з матричних блоків підсилювання, в залежності від того, який конкретно ключ у даний момент часу замкнуто, підсумований вплив подають на динамічні ланки, вихідні багатовимірні сигнали яких підсумовують на суматорі другої групи з впливом, який надходить з датчика контролю зовнішнього збурення через блок підсилювання зовнішнього збурення, далі підсумований багатовимірний сигнал подають на вхід блоку контролю перемикань ключів, на виході якого формують керуючий вплив, який подають на вхід об'єкта керування. Спосіб керування багатовимірним динамічним об'єктом складається з наступних основних етапів: - планування заданої фазової траєкторії; - визначення моментів переключення керуючих функцій у ланцюгах зворотних зв'язків об'єкта керування; 53614 4 - синтез керуючих функцій у ланцюгах зворотних зв'язків багатовимірного об'єкта. Це забезпечується: - побудовою заданої фазової траєкторії та знаходженням моментів часу переключення керуючих функцій шляхом розв'язування системи алгебраїчних рівнянь; - одержанням виразів для керуючих функцій, які фізично реалізуються; - застосуванням керуючих функцій у ланцюгах зворотного зв'язку, які не потребують безпосереднього вимірювання похідних фазових змінних на виході об'єкта керування. За рахунок цього: - відбувається переключення керуючих функцій, що забезпечує необхідний порядок похідної вектора вихідних координат з відповідним позитивним або негативним постійним значенням; - синтез керуючих функцій складається у визначенні керуючих впливів у ланцюгах зворотних зв'язків об'єкта керування, при яких на визначених заданих відрізках фазової траєкторії виконуються умови сталості відповідних похідних вектора вихідних координат; - при русі по координатних осях на кожнім відрізку фазової траєкторії включається на заданий час відповідний ланцюг зворотного зв'язку, що реалізує задану керуючу функцію. Винахідницький задум полягає в тому, що спосіб керування багатовимірним динамічним об'єктом забезпечує не тільки проходження об'єкта по розрахованій траєкторії, а також і його переміщення у найбільш економічному режимі, або найбільш швидкісному, що досягається завдяки введенню динамічних ланок та додаткових матричних блоків підсилювання у ланцюгах зворотного зв'язку. При цьому суттєво підвищується швидкодія системи керування у 2-2,5 рази при виборі траєкторій руху з максимальними значеннями (при урахуванні обмежень на керуючий вплив) та більш високим порядком значень сталих похідних вихідних координат об'єкта керування; чи забезпечується максимальна енергоекономічність системи при використанні траєкторій руху з мінімальними значеннями та порядком сталих похідних вихідних координат об'єкта керування. Планування фазової траєкторії руху полягає у формуванні необхідної кількості відрізків фазової траєкторії з постійними значеннями відповідних похідних вектора вихідних координат, а також у визначенні моментів часу переключення керуючих функцій у ланцюгах зворотних зв'язків для забезпечення переходу об'єкта по кожній з координатних осей з даного відрізка траєкторії на наступний відрізок. Наприклад, розглянемо рух об'єкта керування з початкового стану, обумовленого початко вими умовами X(0) , X(0) , у задане з кінцевими умовами X(T' ) , X(T' ) . У цьому випадку для виконання заданих граничних умов при (0) 0 фазоX ва траєкторія руху по кожній з координатних осей буде складатися з двох відрізків, описуваних наступними рівняннями: перший відрізок траєкторії для 0 t l t1 : 5 l X(t1) X(0) l X( t1) 53614 l 2 (t ) X(0) 1 ; 2 l X(0)t1 l X(0) X(0)t1, l другий відрізок траєкторії для t1 X(Tl ) l X(t1) X(t lt )( Tl X(T l ) l X( t1) X(0)( T l (1) t (Tl X(0) l t1 ) Tl l t1 )2 2 (2) l t1 ) де Tl - час закінчення руху по кожній з координатних осей, t - поточний час руху, l t1 - моменти часу переключення керуючих функцій при русі по кожній з координатних осей. Для обчислення необхідних трьох моментів часу переключення керуючих функцій при переході з одного відрізка фазової траєкторії на іншій спільно вирішуються системи рівнянь (1) і (2) від U(p) B 1 {( A 6 носно при заданих граничних умовах. У загальному випадку фазова траєкторія по кожній з координатних осей складається із суми відрізків, що відповідають заданій сукупності граничних умов, і описується системою алгебраїчних рівнянь виду l щодо моментів часу переключення t1 . У динамічній системі, що описується векторно-матричним рівнянням: X(t) AX(t) BU(t) CF(t) , де значення векторів і матриць мають наступний зміст: С - матриця коефіцієнтів, F(t) - відома, безперервна, векторна функція зовнішнього збурювання, що диференціюється. Для відповідних (другий і до n-ої) нульових похідних вектора X(t) маємо для керуючих функцій після застосування перетворення Лапласа при початкових умовах (n 2) U(0),...., U (0) для керуючого впливу: pE) 1[ A 2 X(p) BU(0)] CF(p)}; ................................... U(p) де матриця A n n 2 B p jAn 1 {( p n 1E (n 2 ) A n ) 1[ A n X(p) B U (0) ... j 1 . j 0 На рисунку представлено блок - схему реалізації способу керування багатовимірним динамічним об'єктом. Вихід об'єкта керування 1 паралельно зв'язано з входами матричних блоків підсилювання 2, 3 та 4, де останній позначає n-ний матричний блок підсилювання, виходи яких з'єднано з входами першої групи суматорів, які паралельно з'єднано з виходами блока завдання початкового керуючого впливу 5, виходи суматорів пов'язано з входами динамічних ланок 6, 7 та 8 відповідно, де останній позначає n-ну динамічну ланку. Виходи динамічних ланок 6, 7 та 8 з'єднано з другою групою суматорів. Вихід датчика контролю зовнішнього збурення 9 пов'язано з входом матричного блоку підсилювання зовнішнього збурення 10, вихід якого паралельно з'єднано з другою групою суматорів, які пов'язано з виходами динамічних ланок 6, 7 та 8. Виходи другої групи суматорів приєднано до входів блоку контролю перемикань ключів 11, вхід якого поєднано з блоком визначення моментів перемикання ключів 12. Вихід блока контролю перемикань ключів 11 з'єднано з входом об'єкта керування 1. До блоку 13, який є системою керування, входять усі блоки з 2 по 12. Спосіб керування багатовимірним динамічним об'єктом реалізується наступним чином. У блоці визначення моментів перемикань ключів апріорно розраховуються моменти часу перемикання ключів у ланцюгах зворотного зв'язку. З A n 2 BU(0)] CF(p)} виходу об'єкта керування 1 на вхід системи керування 13 подається багатовимірний сигнал змінних стану на один з ланцюгів зворотного зв'язку, у момент часу апріорно розрахований у блоці визначення моментівперемикань ключів 12. Після чого на суматорі першої групи підсумовуються один з вихідних багатовимірних сигналів U01(p), U02(p) або U0n(p) блоку завдання початкового керуючого впливу 5, де останній позначає керуючий вплив, який подається на n-ний ланцюг зворотного зв'язку, та одного з матричних блоків підсилювання 2, 3 або 4, в залежності від того який конкретно ключ у даний момент часу замкнуто. Підсумований вплив подається на динамічні ланки 6, 7 або 8, вихідні багатовимірні сигнали яких підсумовується на суматорі другої групи з впливом, який подається з датчика контролю зовнішнього збурення 9 через блок підсилювання зовнішнього збурення 10, підсумований багатовимірний сигнал подається на вхід блоку контролю перемикань ключів 11, на виході якого формується керуючий вплив U(p), і останній подається на вхід об'єкта керування. Таким чином, позитивний ефект полягає в удосконаленні принципу побудови заданих фазових траєкторій для різних видів граничних умов, що дозволяє оптимізувати проходження об'єкта по розрахованій траєкторії, виходячи із економічних та енергетичних аспектів, та який досягнуто завдяки використанню способу керування багатовимірним динамічним об'єктом. Економічність можна підвищити на 3-5%. 7 Комп’ютерна верстка А. Рябко 53614 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl method for multivariable dynamic object
Автори англійськоюTymchenko Viktor Leonidovych, Kondratenko Yurii Panteliiovych, Kuklina Kateryna Oleksiivna
Назва патенту російськоюСпособ управления многомерным динамическим объектом
Автори російськоюТымченко Виктор Леонидович, Кондратенко Юрий Пантелеевич, Куклина Екатерина Алексеевна
МПК / Мітки
МПК: G05B 11/01
Мітки: спосіб, керування, об'єктом, багатовимірним, динамічним
Код посилання
<a href="https://ua.patents.su/4-53614-sposib-keruvannya-bagatovimirnim-dinamichnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування багатовимірним динамічним об’єктом</a>
Спосіб оптимального керування процесом флотації
Номер патенту: 29325
Опубліковано: 10.01.2008
Автори: Шульгін Сергій Костянтинович, Ульшин Віталій Олександрович
МПК: B03B 13/00
Мітки: спосіб, флотації, керування, процесом, оптимального
Формула / Реферат:
Спосіб оптимального керування процесом флотації, який включає досягнення необхідних значень режимних параметрів процесів вуглезбагачення в реальному масштабі часу шляхом визначення оптимальних значень керуючих впливів відповідних виконавчих механізмів процесів вуглезбагачення на базі методу динамічного програмування Белмана, коли інформацію про стан режимного параметра з виходу датчика подають на вхід блока, що ідентифікує значення дисперсії...
Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Копилова Зінаїда Миколаївна, Мельник Олександр Дмитрович, Іванов Борис Павлович, Кучеров Дмитро Павлович
МПК: G05B 11/00, G05B 13/00
Мітки: термінального, системах, управління, спосіб, об'єктом, адаптивного, динамічним
Формула / Реферат:
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта...
Спосіб керування ракетою з багатокамерним двигуном на стартовому відрізку траєкторії, стартуючої з рухомої основи
Номер патенту: 51758
Опубліковано: 16.12.2002
Автори: Андронов Артур Семенович, Морозов Валерій Матвійович, Дегтярьова Олена Анатоліївна
МПК: F41F 3/00, F42B 15/00
Мітки: спосіб, основі, рухомої, ракетою, багатокамерним, траєкторії, відрізку, керування, стартовому, стартуючої, двигуном
Формула / Реферат:
Спосіб керування ракетою з багатокамерним двигуном на початковому відрізку траєкторії, що стартує з рухомої основи, який включаює операції визначення висоти підйому ракети, кутового та лінійного пересування ракети і видачі команд на виконавчі органи керування ракетою для відпрацьовування збурень, який відрізняється тим, що здійснюють програмний доворот усіх керуючих камер згоряння двигуна ракети до площини, яка перпендикулярна «небезпечному...
Спосіб оптимального керування режимними параметрами процесів вуглезбагачення
Номер патенту: 6991
Опубліковано: 15.06.2005
Автори: Килимник Олег Вікторович, Зубов Дмитро Анатолійович, Ульшин Віталій Олександрович
МПК: B03B 13/00
Мітки: оптимального, процесів, режимними, параметрами, вуглезбагачення, керування, спосіб
Формула / Реферат:
Спосіб оптимального керування режимними параметрами процесів вуглезбагачення, який полягає в досягненні необхідних значень режимних параметрів процесів вуглезбагачення в реальному масштабі часу шляхом визначення оптимальних значень керуючих впливів відповідних виконавчих механізмів процесів вуглезбагачення на базі методу динамічного програмування Белмана, який відрізняється тим, що інформацію про стан режимного параметра з виходу датчика...
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Комендантова Людмила Степанівна, Сайног Максим Борисович, Доценко Борис Іванович, Кузьмін В'ячеслав Павлович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Егліт Микола Олександрович, Смішко Григорій Павлович, Косовенко Євген Вікторович
МПК: F42B 15/01
Мітки: аеродинамічного, система, зміни, літальним, керування, спосіб, компонування, апаратом
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Попередній патент: Рятувальний пристрій
Наступний патент: Спосіб шифрування даних на основі трьох несумісних груп операцій
Випадковий патент: Металевий силос