Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Кучеров Дмитро Павлович, Мельник Олександр Дмитрович, Іванов Борис Павлович, Копилова Зінаїда Миколаївна

Формула / Реферат
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від кінцевого, за значеннями вагових коефіцієнтів контролера та поточними координатами об'єкта керування обчислюють значення розв'язувальної функції, за знаком цієї функції вибирають знак сигналу керування в системі, сигнал керування подають до входу об'єкта керування, на заключній стадії управління визначають похибку системи управління, в разі досягнення похибкою бажаного значення процес керування в системі завершують, який відрізняється тим, що додатково встановлюють в систему управління еталонну модель об'єкта керування, початковий стан якої відповідає початковому стану динамічного об'єкта, вимірюють її координати, додатково вимірюють відхилення координат об'єкта від еталонної моделі, за наявності зміни у відхиленні координат швидкості динамічного об'єкта та еталонної моделі перемножують сигнал управління та відхилення об'єкта від еталонної моделі, результат множення додають до початкових значень вагових коефіцієнтів контролера, на заключній стадії нові значення вагових коефіцієнтів використовують для обчислення розв'язувальної функції.
Текст
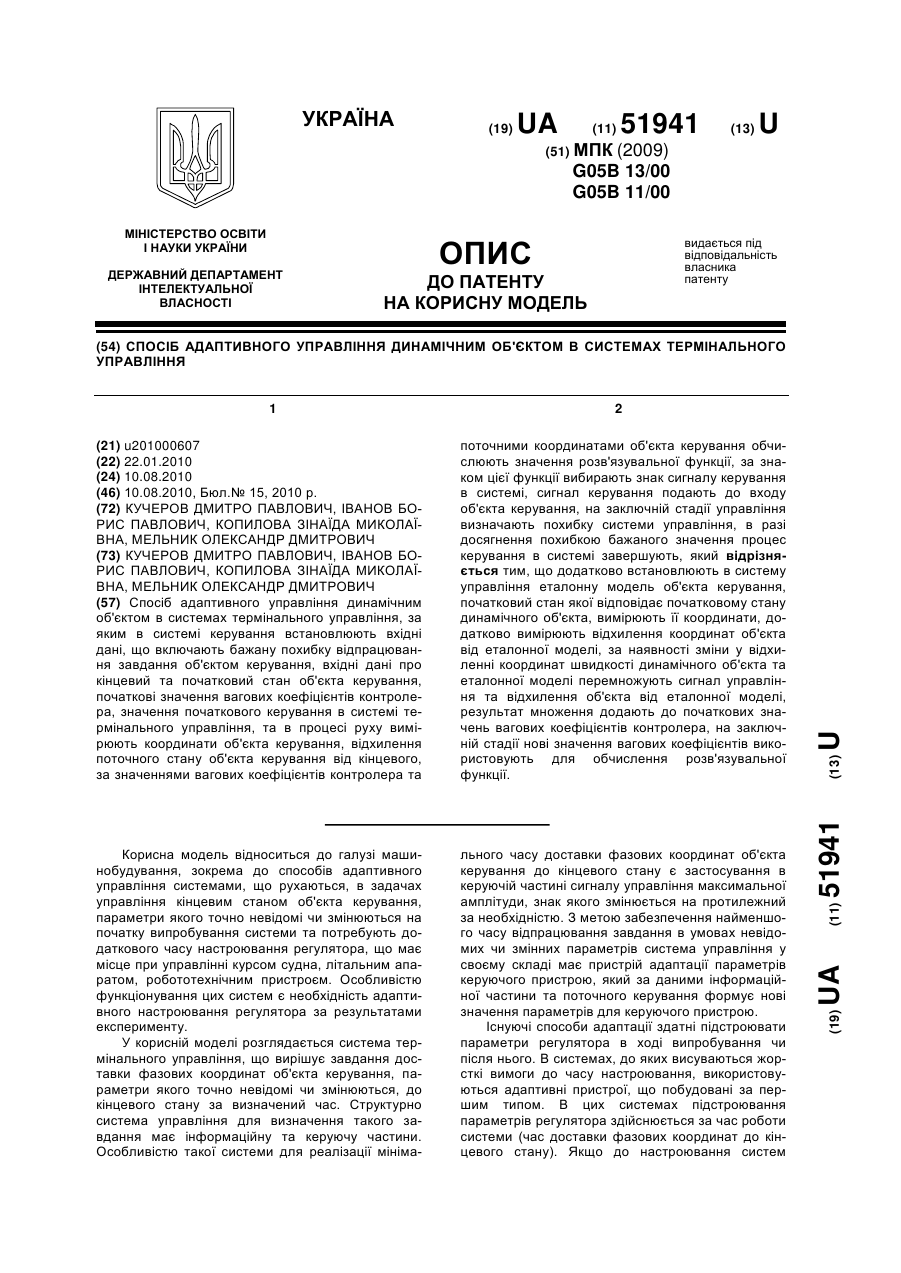
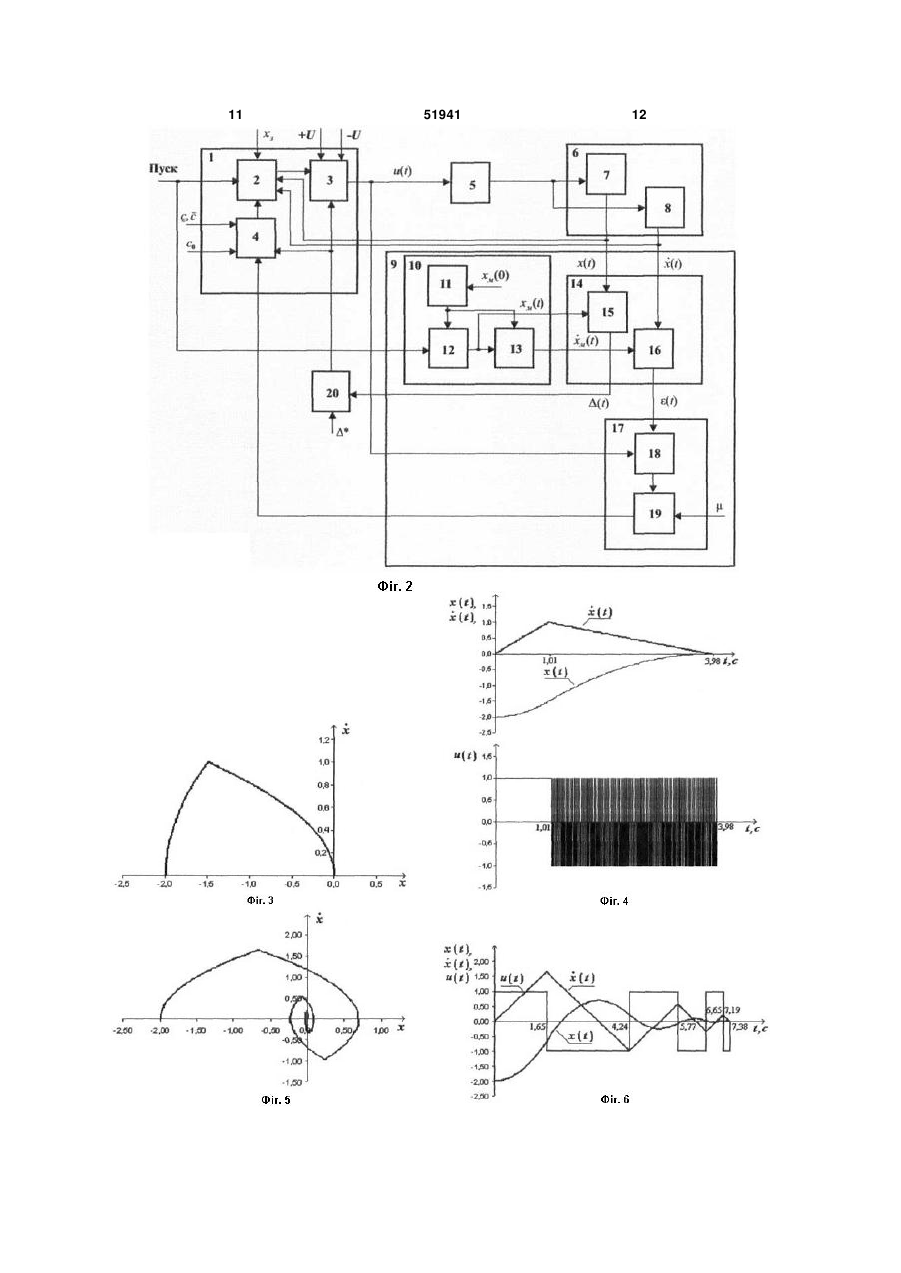
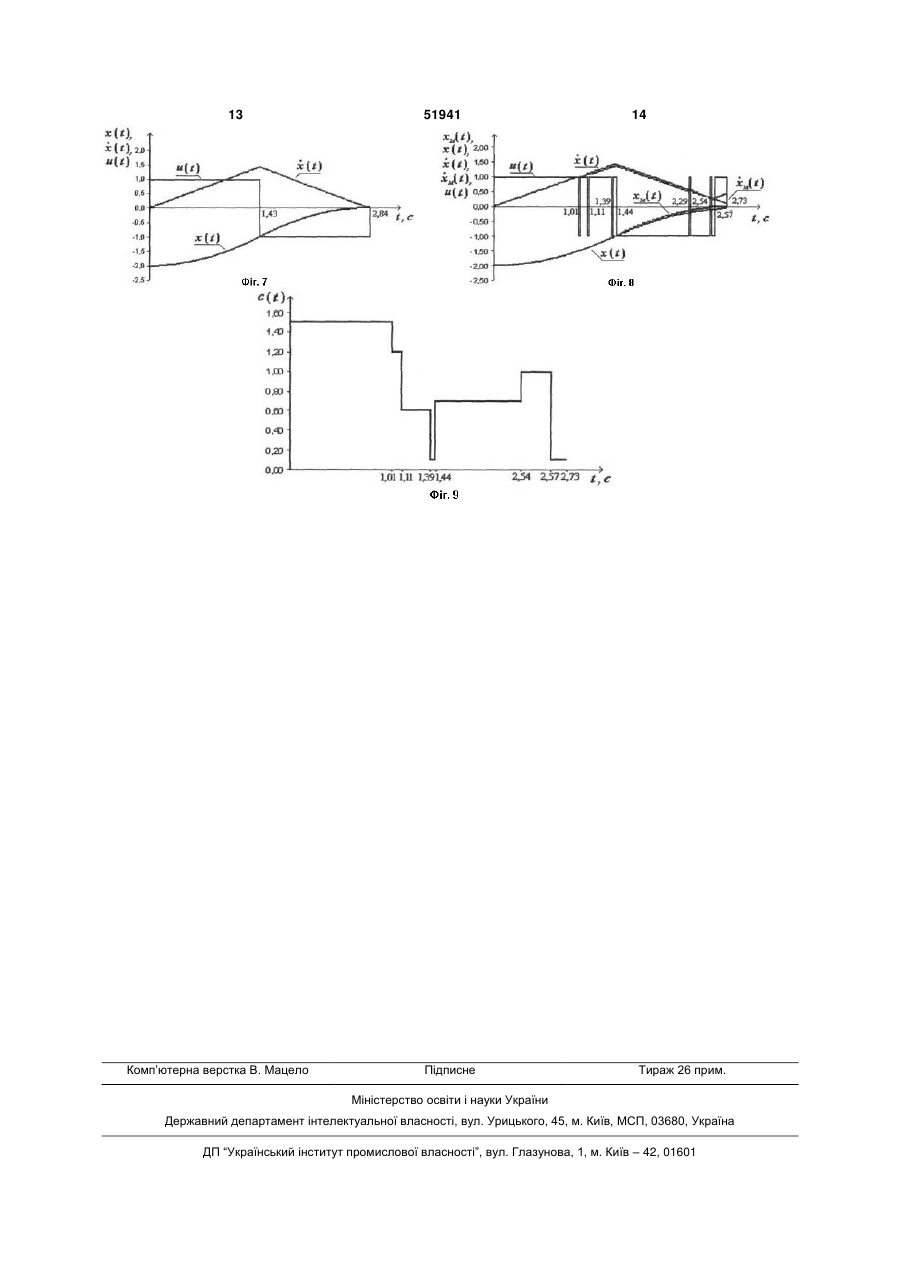
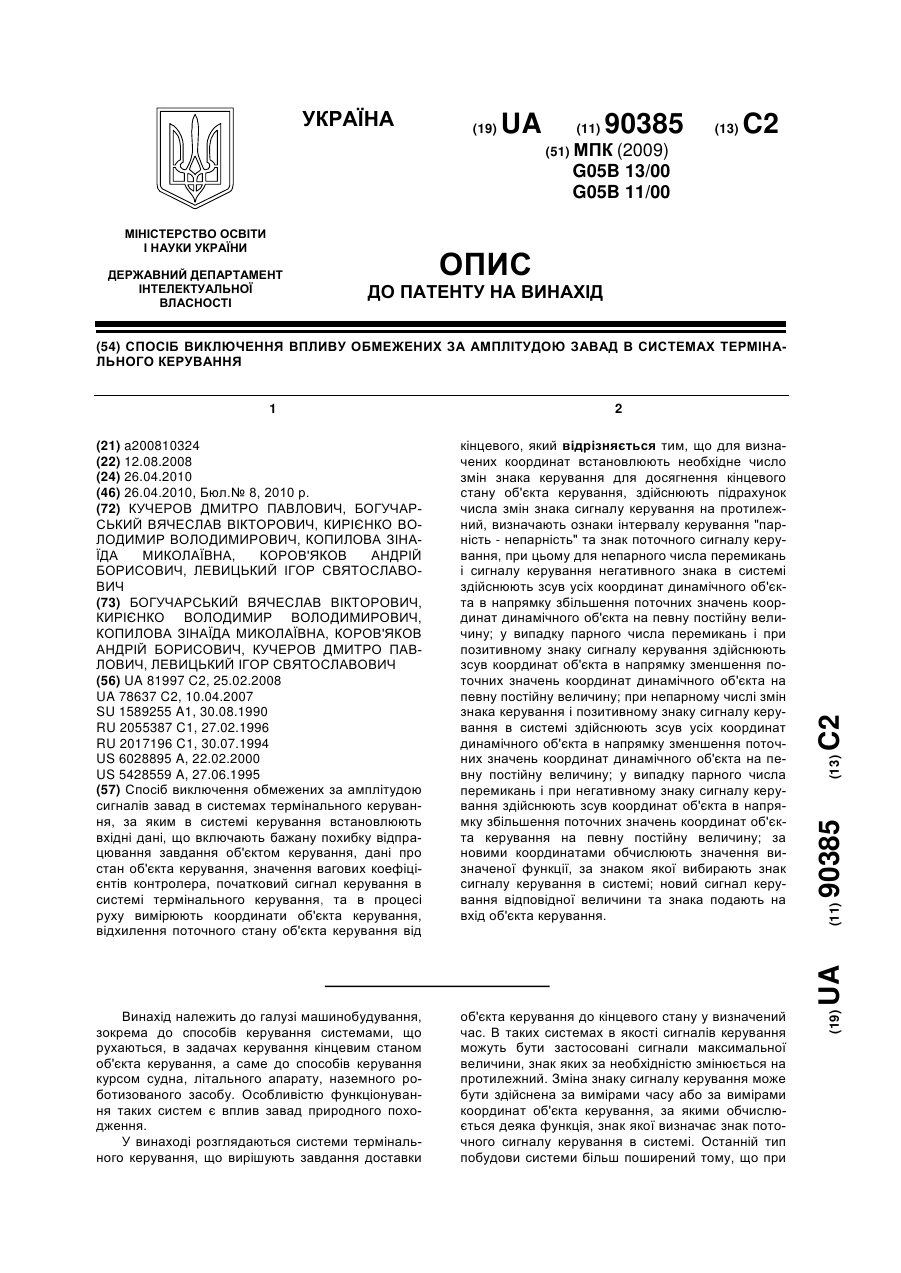
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від кінцевого, за значеннями вагових коефіцієнтів контролера та U 2 (19) 1 3 51941 4 управління не висуваються вимоги за часом, то дення в систему управління еталонної моделі дитакі адаптивні системи будуються способами друнамічного об'єкта та операції множення сигналів гого типу. відхилення координат об'єкта від відповідних коВідомий спосіб адаптивного управління в сисординат еталонної моделі та входу. Результат темах термінального управління з мінімальним цього множення використовується в процесі відпчасом відпрацювання завдання оснований на вирацювання завдання для зміни значень вагових користанні швидкодіючих прогнозуючих пристроїв, коефіцієнтів контролера в поточному часі за умови які будують лінію перемикання сигналу управління відхилення координат швидкості динамічного об'єв скорішому масштабі часу. З метою формування кту при відпрацюванні завдання та еталонної мокоманди на перемикання сигналу управління в делі, що дозволяє здійснити підстроювання контвиконавчому пристрої в таких системах викорисролера за час відпрацювання завдання і, в цілому, товуються дві моделі: самонастроювана та прознизити витрати на створення системи управління гнозуюча. Невідомі параметри об'єкта визначаза рахунок відсутності в складі системи управління ються за реакцією самонастроюваної моделі. За прогнозної моделі та автоматичного оптимізатора. обраним показником якості знайдені невідомі паСпосіб адаптивного управління динамічним раметри об'єкта використовуються прогнозуючою об'єктом в системах термінального управління, за моделлю, яка будує прогнозну лінію перемикання. яким в системі керування встановлюють вхідні За даними прогнозної моделі та реакції керованого дані, що включають бажану похибку відпрацюваноб'єкту на завдання автоматичним оптимізатором ня завдання об'єктом керування, вхідні дані про формуються команди, за якими здійснюється пекінцевий та початковий стан об'єкта керування, ремикання сигналу управління виконавчим припочаткові значення вагових коефіцієнтів контролестроєм, що забезпечує оптимальне керування ра, значення початкового керування в системі теоб'єктом в процесі випробування [1]. рмінального управління, та в процесі руху виміДо недоліків такого способу термінального рюють координати об'єкта керування, відхилення управління відносяться необхідність застосування поточного стану об'єкту керування від кінцевого, за в системі управління адекватних самонастроювазначеннями вагових коефіцієнтів контролера та ної та прогнозуючої моделей, а також складність поточними координатами об'єкта керування обчисистеми, яка пов'язана з застосуванням додаткослюють значення розв'язувальної функції, за знавих елементів системи - прогнозуючої моделі та ком цієї функції вибирають знак сигналу керування автоматичного оптимізатора та необхідністю врав системі, сигнал керування подають до входу хування їх дій. Порушення умови адекватності об'єкта керування, на заключній стадії управління погіршує такі показники системи, як точність відпвизначають похибку системи управління, в разі рацювання та витрати на створення додаткових досягнення похибкою бажаного значення процес елементів системи управління. За необхідності керування в системі завершують, полягає в тому, врахування порядку математичної моделі складщо додатково встановлюють в систему управління ність системи може значно підвищитись без покеталонну модель об'єкта керування, початковий ращання зазначених показників. стан якої відповідає початковому стану динамічноНайбільш близьким способом, обраним за го об'єкта, вимірюють її координати, додатково прототип, є спосіб адаптивного управління динамівимірюють відхилення координат об'єкта від етачним об'єктом, за яким в системі термінального лонної моделі; за наявності зміни у відхиленні коуправління встановлюють вхідні дані, що включаординат швидкості динамічного об'єкта та еталонють бажану похибку відпрацювання завдання об'єної моделі перемножують сигнали управління та ктом керування, вхідні дані про стан об'єкта керувідхилення об'єкта від еталонної моделі, резульвання, початкові значення вагових коефіцієнтів тат множення додають до початкових значень ваконтролера, значення початкового керування в гових коефіцієнтів контролера, на заключній стадії системі термінального управління; в процесі руху нові значення вагових коефіцієнтів використовувимірюють координати об'єкта керування, відхиють для обчислення розв’язувальної функції. лення поточного стану об'єкту керування від кінцеПорівняльний аналіз способу, який заявляєтьвого; після закінчення випробування системи ся, із прототипом дозволяє дійти висновку, що управління встановлюють нові значення вагових спосіб адаптивного управління динамічним об'єккоефіцієнтів контролера. Процес адаптації закінтом в системах термінального управління з етачується, коли вимоги за точністю системи управлонною моделлю відрізняється тим, що при встаління задовольняються [2]. новленні вхідних даних в системі керування Недоліком способу адаптації, який обраний за додатково вводиться еталонна модель об'єкта прототип, є покрокове настроювання, за яким керування та операція множення, при обчисленні встановлення необхідних значень вагових коефінового сигналу керування в системі термінального цієнтів здійснюється після закінчення випробувануправління вимірюють координати еталонної моня. Цей недолік унеможливлює настроювання сисделі, відхилення координат об'єкта від еталонної теми управління в межах одного кроку моделі; при виявленні відхилення координат швивипробування системи. дкості об'єкту керування та еталонної моделі пеВ основу способу адаптивного управління диремножують сигнали управління та відхилення намічним об'єктом в системах термінального координат об'єкта від еталонної моделі, результат управління за винаходом покладено завдання множення додають до початкових значень вагових шляхом усунення недоліків прототипу забезпечити коефіцієнтів контролера. На заключній стадії форнастроювання вагових коефіцієнтів контролера в мування поточного сигналу керування при обчиспроцесі відпрацювання завдання за рахунок вве 5 51941 6 ленні розв’язувальної функції використовують нові ложення 7, датчика швидкості 8, пристрою адапзначення вагових коефіцієнтів в контролері. тації 9, що складається з формувача еталонної Таким чином, спосіб адаптивного управління в моделі 10, що складається з формувача значень системах термінального управління, який заявляпочаткових координат моделі 11 та формувачів ється, відповідає критерію винаходу "новизна". значень координат положення еталонної моделі Суть способу пояснюється за допомогою ілюс12 та значень координат швидкості еталонної мотрацій, на Фіг.1 показано послідовність дій викоделі 13, блок обчислення відхилення координат нання способу, що заявляється, на Фіг.2 приведединамічного об'єкту від еталонної моделі 14, що но структурну схему пристрою, що реалізує спосіб, складається з обчислювача відхилення за полоякий заявляється, на Фіг.3 показано динаміка об'єженням 15 та відхилення за швидкістю 16, блоку кта керування з початковою установкою коефіцієнмноження сигналів 17, що складається з блоку тів без адаптації в ковзному режимі для випадку множення сигналу управління та відхилення за вимірювання двох координат у площині положеншвидкістю 18, блоку множення добутку на коефіціня-швидкість, на Фіг.4 показано той же ковзний єнт підсилення 19 та блоку зупину 20. режим об'єкта керування у часовій площині, на Конструктивно вихід контролера 2 зв'язаний зі Фіг.5 показано режим автоколивань у фазовій входом динамічного об'єкта 5 через релейний площині, на Фіг.6 пояснюється режим автоколиелемент 3. Вихід релейного елементу 3 додатково вань в часовій площині, на Фіг.7 показано оптимазв'язаний зі входом блоку множення 18. Вихід льну за швидкодією траєкторію об'єкта, на Фіг.8 об'єкта 5 конструктивно зв'язаний зі входами датпоказано процес адаптації координат об'єкту керучиків положення 7 та швидкості 8. Виходи датчиків вання в реальному масштабі часу, на Фіг.9 покаположення 7 та швидкості 8 конструктивно зв'язані зано процес настроювання вагового коефіцієнта з сигнальними входами контролера 2 та з блоками контролера. обчислення відхилення положення динамічного Послідовність виконання дій в способі адаптиоб'єкту від еталонного 15 і відхилення швидкості вного управління в системах термінального управдинамічного об'єкту від еталонного 16 відповідно. ління пояснюєтьсясхемою на Фіг.1, де показано, Для реалізації зупину руху об'єкту вихід блоку 15 що перед початком функціонування в системі кезв'язаний зі входами блоків 3, 4 через блок зупину рування встановлюють вхідні дані, які складаються 20. Для реалізації способу адаптивного настроюз припустимої похибки Δ* відпрацювання завдання вання вагових коефіцієнтів контролера при керудинамічним об'єктом, початкових векторів настрованні динамічним об'єктом пристрій додатково юваних параметрів с0, початкового станів х(0) димістить формувач початкових значень координат намічного об'єкта та хм(0), розв’язувальної функції положення та швидкості еталонної моделі 11, який F(c, Х(t)), початкового сигналу керування u(0) на зв'язаний зі входами формувачів значень коордивході динамічного об'єкта, коефіцієнту підсилення нат положення 12 та швидкість 13 еталонної моделі. Виходи блоків 12 та 13 конструктивно зв'язані . Далі, в процесі настроювання вимірюють не з іншими входами блоків обчислення відхилення тільки координати х(t) динамічного об'єкта, а ще й за положенням 15 та швидкістю 16. Вихід блоку додатково контролюють координати еталонної обчислення відхилення швидкості динамічної момоделі xм(t). За даними координат x(t) динамічного делі та еталонної моделі 16 конструктивно зв'язаоб'єкта та еталонної моделі xм(t) обчислюється ний зі входом блоку множення 18. Вихід блоку похибка встановлення координат динамічного множення 18 зв'язаний зі входом блоку множення об'єкта в кінцевий стан Δ(t), а також додатково 19. Вихід блоку множення 19 зв'язаний зі входами обчислюються відхилення координат динамічного вагових коефіцієнтів контролера 2 послідовно чеоб'єкта від координат еталонної моделі ε(t). В разі рез блок суматора 4. виявлення відхилення координати ε(t) від усталеПристрій, за допомогою якого реалізується ної величини значення сигналу відхилення ε(t) спосіб адаптивного управління в системах терміперемножують зі значенням поточного управління нального управління при керуванні динамічним u(t), результат множення з коефіцієнтом підсиленоб'єктом, працює таким чином. ня додають до початкового вектора настроюваПеред початком роботи системи керування них параметрів с, для нового коефіцієнта c(t) об(див. Фіг.2) для об'єкта, що знаходиться в початкочислюють значення розв’язувальної функції F(c(t), вому стані x(0), встановлюють припустиме значенX(t), за знаком цієї функції обчислюють сигнал ня похибки Δ* відпрацювання завдання та значенуправління для даного моменту часу керування t. ня координат початкового стану еталонної моделі На заключній стадії настроювання в разі невідпоxм(0). Встановлюють також довільні значення вавідності значень похибки Δ(t) її порогу Δ* провогових коефіцієнтів контролера с0. На вхід системи диться подальше обчислення сигналу управління подають завдання x3 для відпрацювання. Момент для нових координат поточного стану динамічного часу t подачі команди «Пуск» на систему керуваноб'єкту управління х(t) та еталонної моделі xм(t). ня вважають за початковий, тобто t=0. Команда Спосіб настроювання системи адаптивного «Пуск» подається також на еталонну модель 10. З термінального управління при керуванні динамічцього моменту здійснюють розрахунок похибки і ним об'єктом реалізується за допомогою пришвидкості динамічного об'єкта за допомогою датстрою, який містить (див. Фіг.2), як варіант консчиків положення 7, швидкості 8 і формування знатруктивного виконання, виконавчу частину 1, що чень координат моделі за допомогою формувача складається з контролера 2, релейного елемента значень координат положення моделі 12 та фор3, суматора вагових коефіцієнтів контролера 4, мувача значень швидкості еталонної моделі 13. Їх динамічного об'єкта 5, вимірювального каналу дизначення поступають на блоки обчислення відхинамічного об'єкта 6, що складається з датчика по 7 51941 8 лення координат об'єкта від відповідних координат часу (t-0), -встановлене значення коефіцієнту моделі 15, 16. Значення координат динамічного підсилення. об'єкта з виходу блоків 7, 8 поступають на сигнаПравило (3) діє кожного разу, коли існує зміна льні входи контролера 2. На входи вагових коефіу відхиленні усталеного значення швидкості руху цієнтів контролера подають значення с0 через суоб'єкта від моделі, обраної за еталон, тобто коли матор 4 в момент пуску системи. На інший вхід t 0 . Виявлення зміни у значенні швидкості суматора 4 та релейного елементу в момент t=tk здійснюється безперервно протягом відпрацюванабо, якщо Δ(t)
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive control method for a dynamic object in termination control systems
Автори англійськоюKucherov Dmytro Pavlovych, Ivanov Borys Pavlovych, Kopylova Zinaida Mykolaivna, Melnyk Oleksandr Dmytrovych
Назва патенту російськоюСпособ адаптивного управления динамическим объектом в системах терминального управления
Автори російськоюКучеров Дмитрий Павлович, Иванов Борис Павлович, Копилова Зинаида Николаевна, Мельник Александр Дмитриевич
МПК / Мітки
МПК: G05B 13/00, G05B 11/00
Мітки: спосіб, управління, системах, об'єктом, адаптивного, термінального, динамічним
Код посилання
<a href="https://ua.patents.su/7-51941-sposib-adaptivnogo-upravlinnya-dinamichnim-obehktom-v-sistemakh-terminalnogo-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивного управління динамічним об’єктом в системах термінального управління</a>
Спосіб виключення впливу обмежених за амплітудою завад в системах термінального керування
Номер патенту: 90385
Опубліковано: 26.04.2010
Автори: Коров'яков Андрій Борисович, Богучарський В''ячеслав Вікторович, Кучеров Дмитро Павлович, Левицький Ігор Святославович, Копилова Зінаїда Миколаївна, Кирієнко Володимир Володимирович
МПК: G05B 11/00, G05B 13/00
Мітки: виключення, керування, завад, амплітудою, обмежених, термінального, впливу, спосіб, системах
Формула / Реферат:
Спосіб виключення обмежених за амплітудою сигналів завад в системах термінального керування, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, значення вагових коефіцієнтів контролера, початковий сигнал керування в системі термінального керування, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану...
Спосіб адаптивного управління процесом дистиляції у виробництві соди
Номер патенту: 48356
Опубліковано: 15.08.2002
Автори: Беляк Петро Ілліч, Золотухін Олег Борисович, Зуєв Сергій Михайлович, Лесько В'ячеслав Антонович, Левченко Віктор Дорофейович, Шкіндер Ігор Володимирович
МПК: C01D 7/18, G05D 27/00
Мітки: адаптивного, спосіб, виробництві, управління, процесом, соди, дистиляції
Формула / Реферат:
1. Спосіб адаптивного управління процесом дистиляції у виробництві соди шляхом подачі двох потоків вапна в змішувач і дистилер зі зміною подачі вапна в змішувач і дистилер по величині рН рідини змішувача і корегуванням подачі вапна в дистилер по концентрації СаО в рідині дистилера, який відрізняється тим, що подачу вапна в змішувач корегують у залежності від зміни тиску парогазового середовища у верхній частині дистилера.2. Спосіб по...
Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів
Номер патенту: 38860
Опубліковано: 15.05.2001
Автори: Мокеєв Юрій Геннадійович, Марченко Василь Васильович, Немчин Олександр Федорович, Рябкін Юрій Вікторович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ
МПК: H03G 3/20
Мітки: сигналів, вимірювання, потоку, пристрій, вхідного, порогом, адаптивного, управління, амплітуди
Формула / Реферат:
(21) 2000116221 Дата прийняття(54) (57) рішення 16 березня 2001 р.Пристрій адаптивного управління порогом вимірювання амплітуди вхідного потоку сигналів, що містить підсилювач з...
Спосіб адаптивного управління процесом карбонізації у виробництві соди
Номер патенту: 22819
Опубліковано: 21.04.1998
Автори: Левченко Віктор Дорофейович, Золотухін Олег Борисович, Шкіндер Ігор Володимирович, Беляк Петро Ілліч
МПК: C01D 7/18, G05D 27/00
Мітки: соди, спосіб, адаптивного, управління, карбонізації, процесом, виробництві
Формула / Реферат:
Способ адаптивного управления процессом карбонизации в производстве соды путем изменения отбора суспензии гидрокарбоната натрия из колонны в зависимости от отклонения температуры газожидкостной среды в верхней абсорбционной зоне от задания регулятору и регулирования расхода диоксида углерода в колонну, отличающийся тем, что задания регуляторам температуры газожидкостной среды в верхней абсорбционной зоне колонны и расходов диоксида углерода...
Спосіб контролю систем управління ракет
Номер патенту: 31113
Опубліковано: 15.12.2000
Автори: Доценко Борис Іванович, Косовенко Євген Вікторович, Кузьмін В'ячеслав Павлович, Семенов Леонід Антонович
МПК: G05B 23/02
Мітки: управління, систем, ракет, спосіб, контролю
Формула / Реферат:
Спосіб контролю систем управління ракет, який полягає у дії керуючого сигналу на вхід контрольованої системи, імітації ракети, як об’єкта управління, визначенні як інформативного параметра промаху ракети, що відрізняється тим, що керуючий сигнал формують залежно від поточного відхилення ракети від заданих координат, а параметри ракети, як об'єкта управління, змінюють у часі згідно з заданим законом.
Попередній патент: Спосіб визначення ємності електролітичного розчину
Наступний патент: Спосіб вимірювання мікроскопічних структур
Випадковий патент: Полімерна композиція