Система керування сонячними батареями
Номер патенту: 55405
Опубліковано: 10.12.2010
Автори: Гордін Олександр Григорович, Тесленко Альона Володимирівна, Овчаренко Оксана Вікторівна

Формула / Реферат
Система керування сонячними батареями, яка містить панелі сонячних батарей та елементи їх підвісу на корпусі, систему навігації космічного літального апарата, яка відрізняється тим, що в систему введені для кожної панелі сонячних батарей два триступеневих карданових підвіси зі взаємно ортогональними осями, на кожній з яких знаходяться демпфер та датчик кута, перетворювач інформації, обчислювальний пристрій, підсилювач, а на кожній панелі сонячних батарей встановлені по чотири блока з чотирьох керуючих дроселів-сопл та по три датчики кінематичних параметрів, причому виходи датчиків кінематичних параметрів, виходи датчиків кутів з'єднані з входами перетворювача, вихід якого та вихід системи навігації космічного літального апарата сполучені з відповідними входами обчислювального пристрою, а виходи обчислювального пристрою є входами підсилювача, виходи якого з'єднані з відповідними дроселями керуючих сопл.
Текст
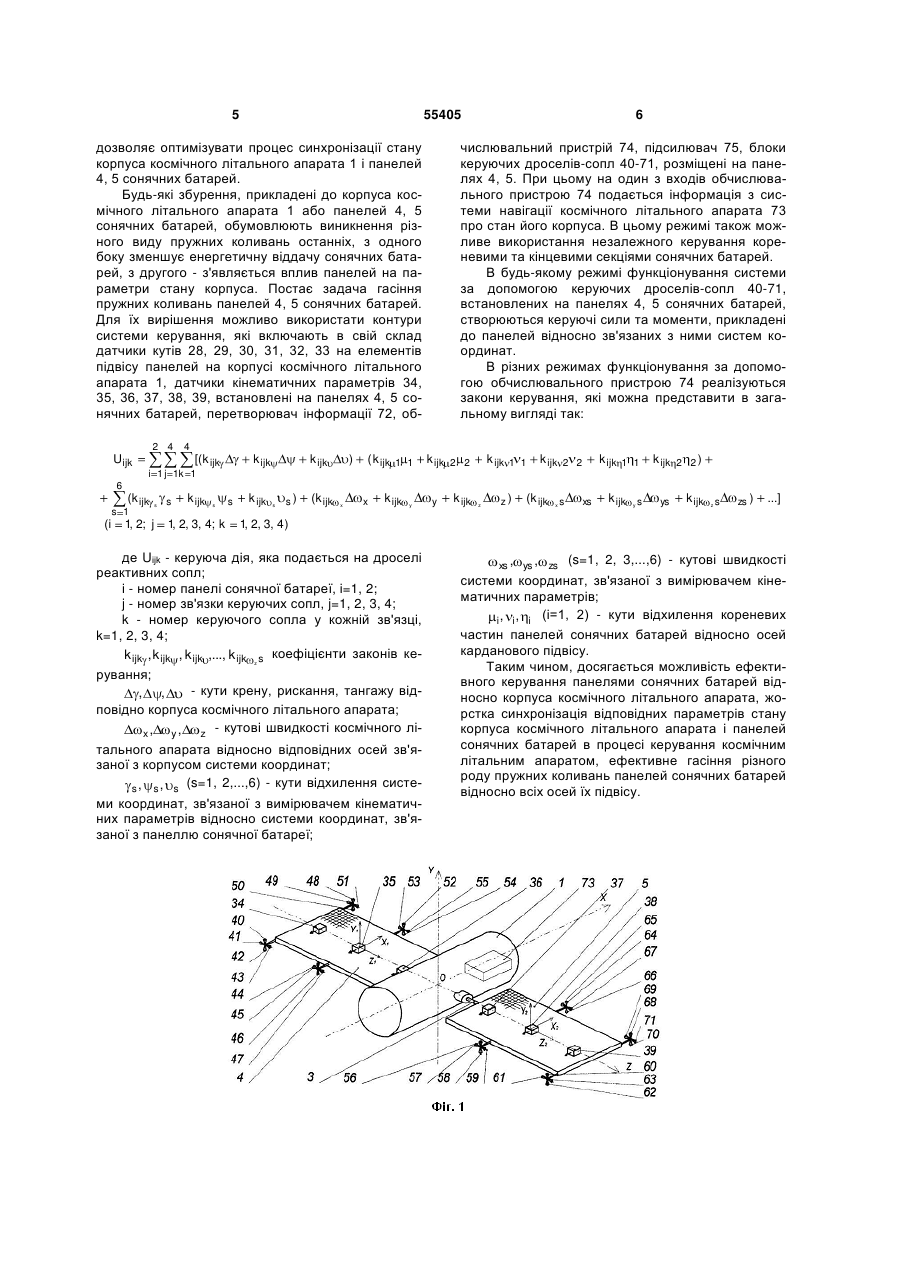
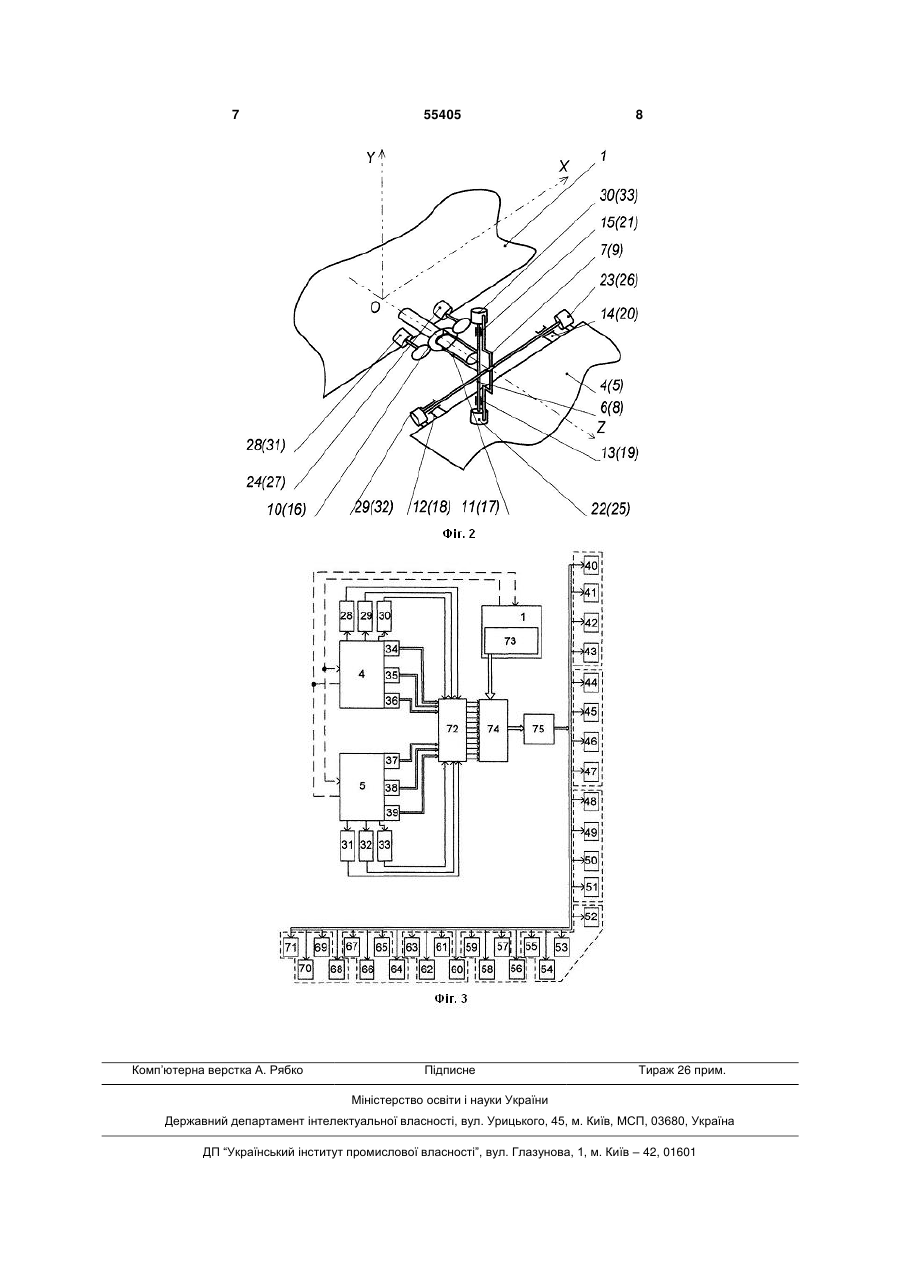
Система керування сонячними батареями, яка містить панелі сонячних батарей та елементи їх підвісу на корпусі, систему навігації космічного літального апарата, яка відрізняється тим, що в систему введені для кожної панелі сонячних бата 3 рей, на Фіг.2 наведена кінематична схема карданова підвісу панелі сонячної батареї, на Фіг.3 наведена структурно-функціональна схема системи керування панелями сонячних батарей. Система керування сонячними батареями складається з панелей 4, 5 сонячних батарей, які за допомогою триступеневих карданових підвісів 2, 3 з взаємно ортогональними осями закріплені до корпусу космічного літального апарата 1. Триступеневі карданові підвіси складаються з рам 6, 7, 8, 9, системи зачеплення 10, 16 між корпусом космічного апарата 1 і роторами датчиків кутів 28, 31 та демпферів 24, 27 та шарнірів 11, 12, 13, 14, 15, 17, 18, 19, 20, 21. На осях рам 6, 7, 8, 9 карданного підвісу 2, 3 розташовані демпфери 22, 23, 24, 25, 26, 27 та датчики 28, 29, 30, 31, 32, 33 кутів. На кожній панелі 4,5 сонячних батарей встановлені по три датчика кінематичних параметрів 34, 35, 36, 37, 38, 39 [Патент №88554 G01P15/00 Україна. Гордін О.Г., Савостьянова А.О. Тривісний вимірювач кінематичних параметрів] та по чотири блока з чотирьох керуючих дроселів-сопл 40-71, за допомогою подібного вимірювача - датчика кінематичних параметрів 34, 35, 36, 37, 38, 39 можливо отримати інформацію про уявні прискорення, швидкості та координати точок розміщення датчиків кінематичних параметрів, кутові прискорення, швидкості та кути відхилення систем координат, зв'язаних з елементами панелей сонячних батарей 4, 5, відносно кінцевого їх стану. Сигнали з датчиків кінематичних параметрів 34, 35, 36, 37, 38, 39 та датчиків кутів 28, 29, 30, 31, 32, 33 поступають в перетворювач інформації 72, виходи якого та вихід системи навігації 73 космічного літального апарату з'єднані з відповідними входами обчислювального пристрою 74. Виходи обчислювального пристрою 74 є входами підсилювача 75, а виходи підсилювача 75 з'єднані з відповідними керуючими дроселями-сопл 40-71. Система керування сонячними батареями працює наступним чином. При взаємному положенні космічного літального апарата та панелей 4, 5 сонячних батарей демпфери 22, 23, 24, 25, 26, 27 сприяють гасінню коливань. В режимі орієнтації панелей 4, 5 сонячних батарей необхідно змінювати кутовий стан панелей відносно корпусу космічного літального апарата 1. При цьому необхідно мати інформацію про поточний та кінцевий стан панелей 4, 5 сонячних батарей. Кінцевий стан панелі 4, 5 сонячних батарей визначається за допомогою вимірювачів та системи навігації 73 космічного літального апарата. Визначити поточний стан панелей 4, 5 за допомогою датчиків кутів 28, 29, 30, 31, 32, 33 на елементах підвісу панелей на корпусі космічного літального апарата 1 неможливо, тому що панелі 4, 5 та їх підвіси 2, 3 є дуже пружними елементами і стани кореневої та інших частин панелей суттєво відрізняються. Для отримання інформації про поточний стан частин панелей 4, 5 сонячних батарей використовують датчики кінематичних параметрів 34, 35, 36, 37, 38, 39, встановлені на панелях 4, 5 сонячних батарей. Обробка у відповідності до спеціального алгоритму інформації з цих датчиків 34, 55405 4 35, 36, 37, 38, 39 дозволяє визначити уявні прискорення, швидкості та координати точок розміщення датчиків кінематичних параметрів, кутові прискорення, швидкості та кути відхилення систем координат, зв'язаних з елементами панелей 4, 5 сонячних батарей, відносно кінцевого їх стану. Ці параметри спільно з інформацією, отриманою з датчиків кутів 28, 29, 30, 31, 32, 33 на елементах підвісу панелей 4, 5 сонячних батарей на корпусі космічного літального апарата 1, а також інформацією про параметри кінцевого стану панелей 4, 5 сонячних батарей, використовуються для реалізації законів керування або алгоритмів формування керуючих діянь, які подаються на органи керування, якими є куруючи дроселі-сопла 40-71, встановлені на панелях 4, 5 сонячних батарей. За допомогою керуючих дроселів-сопл 40-71 створюються керуючі сили та моменти, під дією яких здійснюється орієнтація панелей 4, 5 сонячних батарей. При цьому можливо використовувати різні закони керування (алгоритми) формування керуючих діянь для блоків керуючих дроселів-сопл 4071, встановлених на різних відстанях від кореневої частини панелей 4, 5 сонячних батарей. В режимі синхронізації стану корпуса космічного літального апарата 1 і певного стану панелей 4, 5 сонячних батарей необхідно стабілізувати взаємний стан панелей 4, 5 і корпуса космічного літального апарата 1, використання в цьому режимі тільки органів керування, встановлених на корпусі характеризується такими недоліками: за рахунок пружності конструкції панелей на пружності підвісів панелей на корпусі відповідні параметри стану корпуса і панелей дуже відрізняються одне від одного (панелі в своєму русі «запізнюються» відносно корпуса), подальший рух призводить до пружних коливань панелей відносно корпуса, що обумовлює наявність впливу панелей на параметри стану корпуса; великий період пружних коливань панелей внаслідок виключно слабого їх демпфування. Для виключення цих недоліків необхідно визначити параметри стану панелей 4, 5 сонячних батарей та використовувати додаткові органи керування (керуючи дроселі-сопла 40-71), встановлені на панелях. Таким чином, для реалізації законів керування космічним літальним апаратом в цілому необхідно використовувати інформацію системи навігації космічного літального апарата 73, інформацію з датчиків кутів 28, 29, 30, 31, 32, 33 на елементів підвісу панелей на корпусі космічного літального апарата 1, інформацію з датчиків кінематичних параметрів 34, 35, 36, 37, 38, 39, встановлених на панелях 4, 5 сонячних батарей. В цьому режимі можливе використання незалежного керування кореневими та кінцевими секціями сонячних батарей за допомогою блоків керуючих дроселів-сопл 40-71. Використання інформації з датчиків кінематичних параметрів 34, 35, 36, 37, 38, 39, встановлених на панелях сонячних батарей 4, 5, про уявні прискорення швидкості та координати точок розміщення датчиків кінематичних параметрів, кутові прискорення, швидкості та кути відхилення систем координат, зв'язаних з елементами панелей, та інформації системи навігації космічного літального апарата 73 в цілому 5 55405 дозволяє оптимізувати процес синхронізації стану корпуса космічного літального апарата 1 і панелей 4, 5 сонячних батарей. Будь-які збурення, прикладені до корпуса космічного літального апарата 1 або панелей 4, 5 сонячних батарей, обумовлюють виникнення різного виду пружних коливань останніх, з одного боку зменшує енергетичну віддачу сонячних батарей, з другого - з'являється вплив панелей на параметри стану корпуса. Постає задача гасіння пружних коливань панелей 4, 5 сонячних батарей. Для їх вирішення можливо використати контури системи керування, які включають в свій склад датчики кутів 28, 29, 30, 31, 32, 33 на елементів підвісу панелей на корпусі космічного літального апарата 1, датчики кінематичних параметрів 34, 35, 36, 37, 38, 39, встановлені на панелях 4, 5 сонячних батарей, перетворювач інформації 72, об2 4 Uijk 6 числювальний пристрій 74, підсилювач 75, блоки керуючих дроселів-сопл 40-71, розміщені на панелях 4, 5. При цьому на один з входів обчислювального пристрою 74 подається інформація з системи навігації космічного літального апарата 73 про стан його корпуса. В цьому режимі також можливе використання незалежного керування кореневими та кінцевими секціями сонячних батарей. В будь-якому режимі функціонування системи за допомогою керуючих дроселів-сопл 40-71, встановлених на панелях 4, 5 сонячних батарей, створюються керуючі сили та моменти, прикладені до панелей відносно зв'язаних з ними систем координат. В різних режимах функціонування за допомогою обчислювального пристрою 74 реалізуються закони керування, які можна представити в загальному вигляді так: 4 [(k ijk k ijk k ijk ) ( k ijk 1 1 k ijk 2 2 y k ijk k ijk 1 1 k ijk k ijk 2 2 1 1 k ijk 2 2) ys k ijk i 1 j 1k 1 6 (k ijk s 1 (i s 1, 2; j s k ijk s 1, 2, 3, 4; k s k ijk s s) (k ijk x x k ijk y z z) (k ijk x s xs k ijk y s z s zs ) ...] 1, 2, 3, 4) де Uіjk - керуюча дія, яка подається на дроселі реактивних сопл; і - номер панелі сонячної батареї, і=1, 2; j - номер зв'язки керуючих сопл, j=1, 2, 3, 4; k - номер керуючого сопла у кожній зв'язці, k=1, 2, 3, 4; k ijk , k ijk , k ijk ,..., k ijk z s коефіцієнти законів керування; - кути крену, рискання, тангажу від, , повідно корпуса космічного літального апарата; x, y, z - кутові швидкості космічного літального апарата відносно відповідних осей зв'язаної з корпусом системи координат; s , s , s (s=1, 2,...,6) - кути відхилення системи координат, зв'язаної з вимірювачем кінематичних параметрів відносно системи координат, зв'язаної з панеллю сонячної батареї; xs , ys , zs (s=1, 2, 3,...,6) - кутові швидкості системи координат, зв'язаної з вимірювачем кінематичних параметрів; i , i , i (і=1, 2) - кути відхилення кореневих частин панелей сонячних батарей відносно осей карданового підвісу. Таким чином, досягається можливість ефективного керування панелями сонячних батарей відносно корпуса космічного літального апарата, жорстка синхронізація відповідних параметрів стану корпуса космічного літального апарата і панелей сонячних батарей в процесі керування космічним літальним апаратом, ефективне гасіння різного роду пружних коливань панелей сонячних батарей відносно всіх осей їх підвісу. 7 Комп’ютерна верстка А. Рябко 55405 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійською;;control system of solar panels
Автори англійськоюHordin Oleksandr Hryhorovych, Ovcharenko Oksana Viktorivna, Teslenko Aliona Volodymyrivna
Назва патенту російськоюСистема управления солнечными батареями
Автори російськоюГордин Александр Григорьевич, Овчаренко Оксана Викторовна, Тесленко Алена Владимировна
МПК / Мітки
МПК: B64G 1/24
Мітки: батареями, система, сонячними, керування
Код посилання
<a href="https://ua.patents.su/4-55405-sistema-keruvannya-sonyachnimi-batareyami.html" target="_blank" rel="follow" title="База патентів України">Система керування сонячними батареями</a>
Відмовостійка система керування літальним апаратом
Номер патенту: 36472
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/10
Мітки: система, керування, апаратом, літальним, відмовостійка
Формула / Реферат:
Відмовостійка система керування літальним апаратом, що має аналого-цифровий перетворювач, бортову обчислювальну машину, цифро-аналоговий перетворювач, причому виходи аналого-цифрового перетворювача з'єднані з входами бортової цифрової обчислювальної машини, виходи якої з'єднані з входами цифро-аналогового перетворювача об'єкта керування, яка відрізняється тим, що містить блок відмовостійких сервоприводів, блок відмовостійких давачів, причому...
Гіроскопічна система керування кутовим станом космічного літального апарата
Номер патенту: 24489
Опубліковано: 10.07.2007
Автори: Дибська Ирина Юріївна, Гордін Олександр Григорович, Великородня Юлія Сергіївна
МПК: B64G 1/28
Мітки: кутовим, керування, апарата, система, станом, космічного, літального, гіроскопічна
Формула / Реферат:
1. Гіроскопічна система керування кутовим станом космічного літального апарата, яка містить по кожній осі ортогональної системи координат, зв'язаної з корпусом, триступеневий силовий гіроскоп змінної структури, що дозволяє трансформувати його в двоступеневий силовий гіроскоп, аретуючий пристрій на зовнішній рамі гіроскопа, датчик моменту та демпфіруючий пристрій на осі підвісу внутрішньої рами, яка відрізняється тим, що по кожній осі...
Система енергозабезпечення космічного літального апарата
Номер патенту: 46219
Опубліковано: 10.12.2009
Автори: Крилевська Валерія Анатоліївна, Зимовін Анатолій Якович, Бандура Іван Миколайович
МПК: G05F 1/56
Мітки: апарата, енергозабезпечення, космічного, літального, система
Формула / Реферат:
Система енергозабезпечення космічного літального апарата, що складається з сонячної батареї, блока контролю й керування, акумуляторної батареї, яка відрізняється тим, що додатково введено (n-1) акумуляторних батарей, мікроконтролер, входи і виходи якого підключені до регулятора надлишкової потужності, n регуляторів заряду, n регуляторів розряду та n блоків контролю й керування.
Система розвантаження силових гіроскопів космічного апаратa
Номер патенту: 4604
Опубліковано: 17.01.2005
Автори: Болдовська Наталія Олександрівна, Бандура Іван Миколайович, Болдовська Олена Олександрівна
МПК: B64G 1/24
Мітки: система, силових, розвантаження, космічного, апарата, гіроскопів
Формула / Реферат:
Система розвантаження силових гіроскопів космічного апарата, що містить вимірювачі абсолютної кутової швидкості, кінетичного моменту силового гіроскопічного комплексу, а також блок визначення сумарного кінетичного моменту космічного апарата і блок обчислення сигналу розвантаження, причому вихід вимірювача абсолютної кутової швидкості з'єднаний з першим входом блока визначення сумарного кінетичного моменту космічного апарата, вихід вимірювача...
Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Полторацька Маргарита Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: система, літальним, апаратом, керування
Формула / Реферат:
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого...
Попередній патент: Спосіб визначення оброблюваності конструкційних матеріалів
Наступний патент: Електричний нагрівач
Випадковий патент: Спосіб очищення основи для приготування поживних середовищ