Пристрій для керування рухомими об’єктами

Формула / Реферат
Пристрій для керування рухомими об'єктами, що містить стрижневу головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента HI та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блока, підключеного виходом до приводу, а також містить додаткову однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, що складаються із включених послідовно порогового елемента та елемента HI, причому вихід додаткової однощілинної головки зчитування підключений через третій фазовий детектор до третього входу виконавчого блока та входів других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, додаткові чотири двощілинні головки зчитування, розташовані по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування та зв'язані через включені послідовно фазові детектори та порогові елементи зі входами елемента І, причому кожну із додаткових двощілинних головок зчитування розміщено від осі основних головок зчитування на відстані, що дорівнює половині товщини полюса головки запису, який відрізняється тим, що пристрій оснащено першим тригером, входи якого з'єднані з виходом порогових елементів першого паралельного ланцюга, а виходи - з першими входами першого і другого додаткових елементів І, та другим тригером, входи якого підключені до виходів порогових елементів другого паралельного ланцюга, а виходи з'єднані з першими входами третього та четвертого додаткових елементів І, причому вихід основного елемента І зв'язаний з другими входами додаткових елементів І, виходи яких підключені до додаткових входів виконавчого блока.
Текст
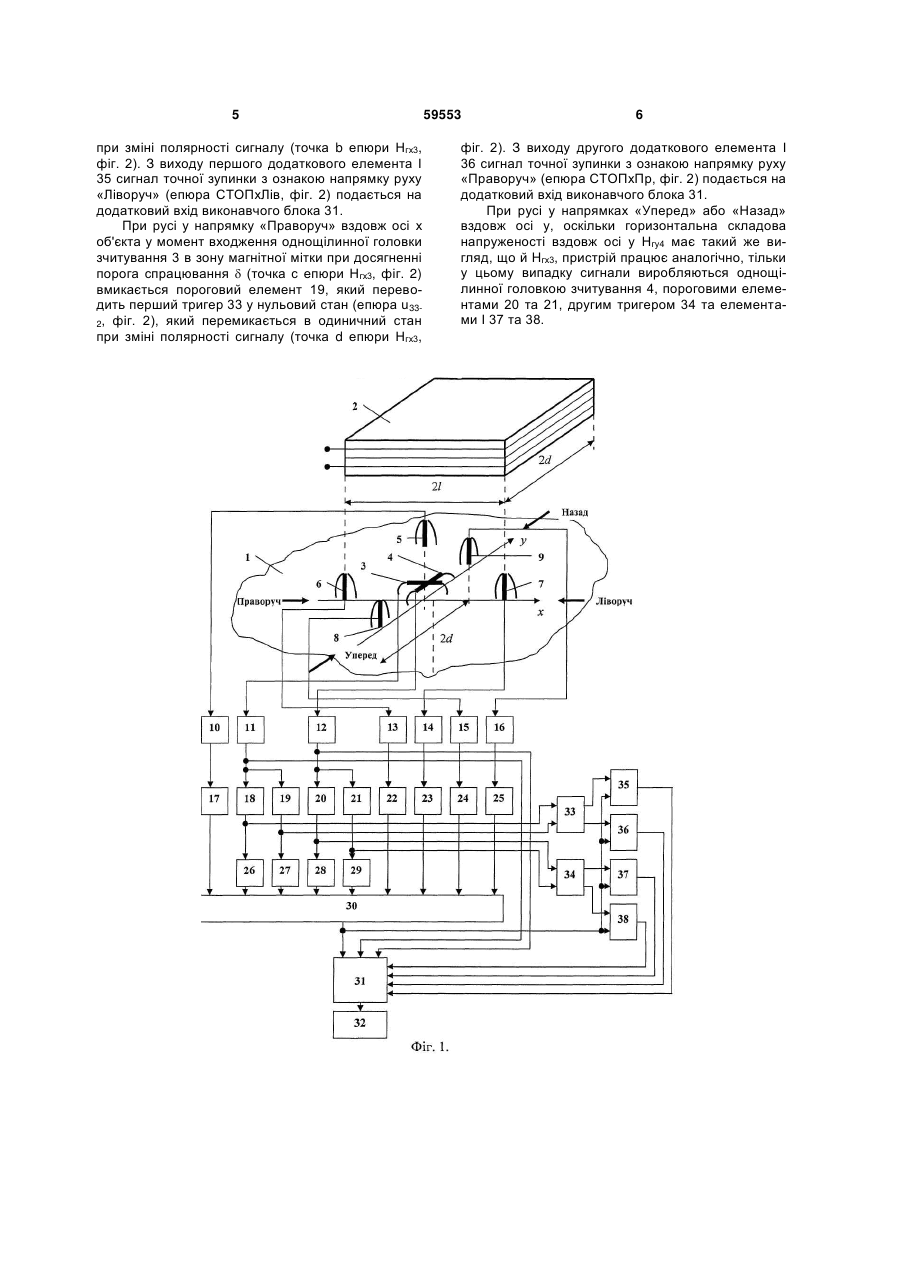
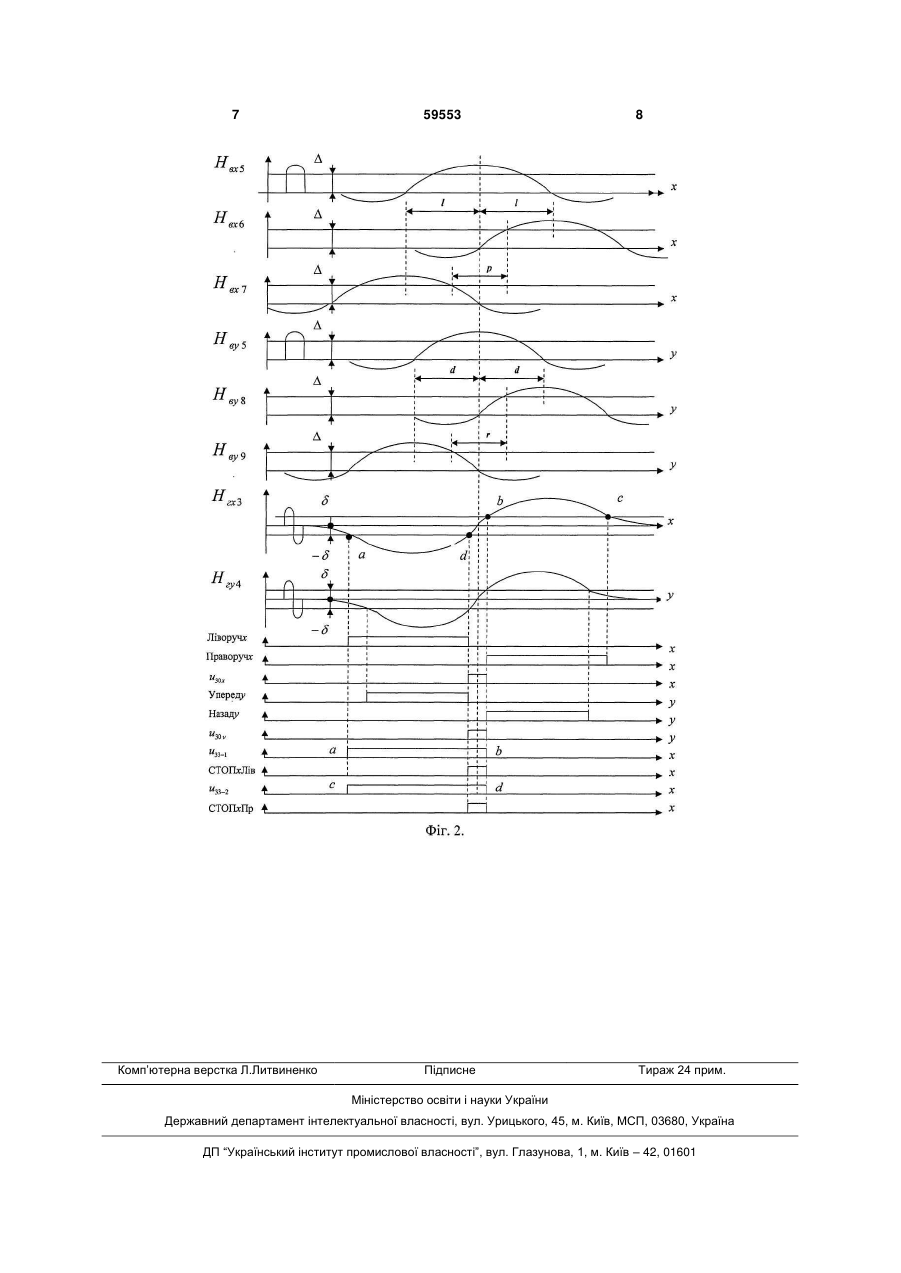
Пристрій для керування рухомими об'єктами, що містить стрижневу головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента HI та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блока, підключеного виходом до приводу, а також містить додаткову однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, що складаються із включених послідовно порогового елемента та елемента HI, причому вихід додаткової од U 2 (19) 1 3 відстані, що дорівнює половині товщини полюса головки запису [див. патент України №50467, МПК G01G7/00, опубл. 10.06.2010, бюл. № 11]. Цей пристрій обрано за прототип. Недоліком відомого пристрою є те, що він має обмежені функціональні можливості, оскільки не забезпечує вироблення сигналів точної зупинки рухомого об'єкта з реверсивним характером руху з ознакою напрямку його руху. В основу корисної моделі поставлено задачу вдосконалення пристрою для керування рухомими об'єктами шляхом того, що пристрій забезпечений тригерами та додатковими елементами І, що дозволить завдяки сигналів точної зупинки рухомого об'єкта з ознакою напрямку його руху підвищити точність керування реверсивно керованих об'єктів. Поставлена задача досягається тим, що пристрій для керування рухомими об'єктами, що містить стрижневу головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента НІ та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блока, підключеного виходом до приводу, а також містить додаткову однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, що складаються із включених послідовно порогового елемента та елемента НІ, причому вихід додаткової однощілинної головки зчитування підключений через третій фазовий детектор до третього входу виконавчого блоку та входам других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, додаткові чотири двощілинні головки зчитування, розташовані по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування та зв'язані через включені послідовно фазові детектори та порогові елементи зі входами елемента І, причому кожну із додаткових двощілинних головок зчитування розміщено від осі основних головок зчитування на відстані, що дорівнює половині товщини полюса головки запису, згідно корисної моделі, пристрій обладнано першим тригером, входи якого з'єднані з виходом порогових елементів першого паралельного ланцюга, а виходи - з першими входами першого і другого додаткових елементів І, та другим тригером, входи якого підключені до виходів порогових елементів другого паралельного ланцюга, а виходи - з першими входами третього та четвертого додаткових елементів І, при цьому вихід основного елемента І зв'язаний з другими входами додаткових елементів І, виходи яких підключені до додаткових входів виконавчого блока. Суть корисної моделі пояснюється кресленням, де зображено пристрій для керування рухомими об'єктами (фіг. 1), що містить магнітоносій 1, 59553 4 головку запису 2, рухомий об'єкт (на фігурі не показаний) із закріпленими на ньому однощілинними головками зчитування 3 та 4, співвісно з якими розташована двощілинна головка зчитування 5, та двощілинними головками зчитування 6-9, розташованими по дві взаємно перпендикулярно та симетрично відносно згаданої вісі, фазові детектори 10-16, порогові елементи 17-25, логічні елементи НІ 26-29, елемент І 30, виконавчий блок 31, привод 32, перший та другий тригери 33 та 34 та перший - четвертий додаткові елементиІ 35-38. Головки зчитування 6 та 7 розміщені одна від одної на відстані 2l, а головки зчитування 8 та 9 одна від одної на відстані 2d. На фіг. 2 наведено діаграми роботи пристрою. Пристрій для керування рухомими об'єктами працює таким чином. Попередньо на носій 1 наносяться магнітні мітки за допомогою стрижневої головки запису 2. Конфігурація зовнішнього магнітного поля мітки, а саме вертикальні та горизонтальні складові напруженості вздовж осей х та у представлені на фіг. 2 (епюри Hвх5, Hвх6, Нвх7, Нву5, Нвy8, Нвy9, Нгх3, Нгу4). При русі об'єкта, на якому розташовані головки зчитування 3-9, в момент входження центра головок зчитування 3-9 в зону магнітної мітки на виходах двощілинних головок зчитування 5-9 з'являються сигнали, які через фазові детектори 10, 13-16 подаються відповідно на порогові елементи 17, 22-25, які спрацьовують при перевищенні сигналів порогів спрацювання , а на виходах однощілинних головок зчитування 3 та 4 з'являються сигнали, які через фазові детектори 11 та 12 подаються у виконавчий блок 31, в якому виробляються сигнали керування по двох координатах х та у (епюри Ліворучх, Праворучх, Упереду, Назаду, фіг. 2). У момент збігу блока головок зчитування 3-9 з центром магнітної мітки сигнали з двощілинних головок зчитування 5-9 через фазові детектори 10, 13-16 та порогові елементи 17, 22-25 подаються відповідно на перший, шостий-дев'ятий входи елемента І 30, а з однощілинних головок зчитування 3 та 4 сигнали не подаються, оскільки вони менші, ніж пороги спрацювання ± порогових елементів 18-21, внаслідок чого з виходів елементів НІ 26-29 на другий-п'ятий входи елемента І 30 надходять імпульси, що призводить до включення цього елементу, який виробляє сигнали у вузькій зоні магнітної мітки (епюри u30х, u30у, фіг. 2). Оскільки протяжність локального магнітного поля перешкоди менша, ніж відстань р між активними частками діаграм двощілинних головок зчитування 6 та 7 та відстань r між активними частками діаграм двощілинних головок зчитування 8 та 9, пристрій від поля перешкоди не спрацьовує, що забезпечує суттєве підвищення перешкодозахищеності та надійності роботи пристрою. При русі у напрямку «Ліворуч» вздовж осі х об'єкта, на якому розташовані головки зчитування 3-9, у момент входження однощілинної головки зчитування 3 в зону магнітної мітки при досягненні порога спрацювання - (точка а епюри Hгх3, фіг 2) вмикається пороговий елемент 18, який переводить перший тригер 33 у одиничний стан (епюра u33-1, фіг. 2), який перемикається у нульовий стан 5 при зміні полярності сигналу (точка b епюри Нгх3, фіг. 2). З виходу першого додаткового елемента І 35 сигнал точної зупинки з ознакою напрямку руху «Ліворуч» (епюра СТОПхЛів, фіг. 2) подається на додатковий вхід виконавчого блока 31. При русі у напрямку «Праворуч» вздовж осі х об'єкта у момент входження однощілинної головки зчитування 3 в зону магнітної мітки при досягненні порога спрацювання (точка с епюри Нгх3, фіг. 2) вмикається пороговий елемент 19, який переводить перший тригер 33 у нульовий стан (епюра u 332, фіг. 2), який перемикається в одиничний стан при зміні полярності сигналу (точка d епюри Нгх3, 59553 6 фіг. 2). З виходу другого додаткового елемента І 36 сигнал точної зупинки з ознакою напрямку руху «Праворуч» (епюра СТОПхПр, фіг. 2) подається на додатковий вхід виконавчого блока 31. При русі у напрямках «Уперед» або «Назад» вздовж осі у, оскільки горизонтальна складова напруженості вздовж осі у Нгу4 має такий же вигляд, що й Hгх3, пристрій працює аналогічно, тільки у цьому випадку сигнали виробляються однощілинної головкою зчитування 4, пороговими елементами 20 та 21, другим тригером 34 та елементами I 37 та 38. 7 Комп’ютерна верстка Л.Литвиненко 59553 8 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of movable objects
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюУстройство для управления подвижными объектами
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 7/00
Мітки: об'єктами, пристрій, рухомими, керування
Код посилання
<a href="https://ua.patents.su/4-59553-pristrijj-dlya-keruvannya-rukhomimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування рухомими об’єктами</a>
Пристрій для керування рухомими об’єктами
Номер патенту: 50467
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
МПК: G01G 7/00
Мітки: керування, об'єктами, рухомими, пристрій
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента HI та підключених...
Пристрій для керування рухомими об’єктами
Номер патенту: 50883
Опубліковано: 25.06.2010
Автор: Смірний Михайло Федорович
МПК: G11B 5/48
Мітки: об'єктами, пристрій, керування, рухомими
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента НІ та підключених виходами до...
Пристрій для керування рухомими об’єктами

Номер патенту: 54970
Опубліковано: 25.11.2010
Автор: Смірний Михайло Федорович
МПК: G11B 5/48
Мітки: рухомими, керування, пристрій, об'єктами
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента НІ та підключених виходами до...
Пристрій для запису та зчитування інформації з магнітного носія

Номер патенту: 56095
Опубліковано: 27.12.2010
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: носія, магнітного, запису, зчитування, пристрій, інформації
Формула / Реферат:
Пристрій для запису та зчитування інформації з магнітного носія, що містить плаский магнітний носій, блок запису, П-подібну головку запису, однощілинні головки зчитування, резонансні підсилювачі, фазові детектори, порогові елементи, елементи НІ, елементи І, дешифратор та виконавчий блок, причому дві додаткові однощілинні головки зчитування розміщені симетрично від осі магнітного носія по відношенню до двох основних головок, при цьому кожна з...
Пристрій для запису та зчитування інформації з магнітного носія
Номер патенту: 50462
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
МПК: G01G 7/00
Мітки: носія, пристрій, зчитування, магнітного, запису, інформації
Формула / Реферат:
Пристрій для запису та зчитування інформації з магнітного носія, що містить плаский магнітний носій, блок запису, П-подібну головку запису, однощілинні головки зчитування, резонансні підсилювачі, фазові детектори, порогові елементи, елементи НІ, елементи І, дешифратор та виконавчий блок, причому дві додаткові однощілинні головки зчитування розміщені симетрично від осі магнітного носія по відношенню до двох основних головок, при цьому кожна з...
Попередній патент: Пристрій для контролю дискретних об’єктів
Наступний патент: Процес профілактики і лікування посттравматичних пневмоній
Випадковий патент: Багатороторна електрична машина