Дистанційно-керований транспортний засіб з багатоцільовим маніпулятором
Номер патенту: 6160
Опубліковано: 15.04.2005
Автори: Роуланд Марк Стефан, Карпачов Юрій Андрійович, Сміт Крейг Ф., Захаренко Анатолій Олександрович, Савенко Юрій Миколайович
Формула / Реферат
1. Дистанційно-керований транспортний засіб, що містить корпус і установлені на його бічних стінках передні і задні колісні рушії, причому кожний з передніх рушіїв оснащено коромислом з розташованими на його кінцях ходовими колесами, коромисла виконані хитними відносно корпусу і через електромагнітні муфти з'єднані одне з одним за допомогою передньої горизонтальної траверси з можливістю повороту коліс навколо неї, а траверса жорстко зв'язана з важелем, установленим між електромагнітними муфтами, другий кінець якого з'єднано зі штоком його приводу, а кожний із задніх рушіїв оснащено одним ходовим колесом, колеса з'єднані одне з одним за допомогою задньої горизонтальної траверси, вільно насадженої в її середній частині на вісь, нормальної до неї, з можливістю повороту коліс навколо осі, і кермової трапеції з розміщеними на її кінцях приводами повороту задніх рушіїв, при цьому кожне ходове колесо оснащено індивідуальним приводом і на корпусі встановлено кабельний барабан із приводом і кабелеукладачем, який відрізняється тим, що на корпусі встановлені маніпулятор, виконаний багатоланковим, і виносні опори, причому ланки маніпулятора з'єднані між собою за допомогою шарнірних зчленувань з розташуванням у них приводів ланок, а дві виносні опори, кожна з яких оснащена двома приводами, розміщені на передній стороні корпусу з можливістю їхньої довільної орієнтації в просторі відносно опорної поверхні, третя опора з одним приводом розміщена на задній стороні корпусу і виконана у вигляді домкрата, при цьому контактна поверхня кожної опори з двома приводами утворена роликом, вільно установленим у ній.
2. Транспортний засіб за п. 1, який відрізняється тим, що оснащений телевізійними камерами, а маніпулятор має пристрої для дослідження навколишнього середовища, у тому числі - захват.
Текст
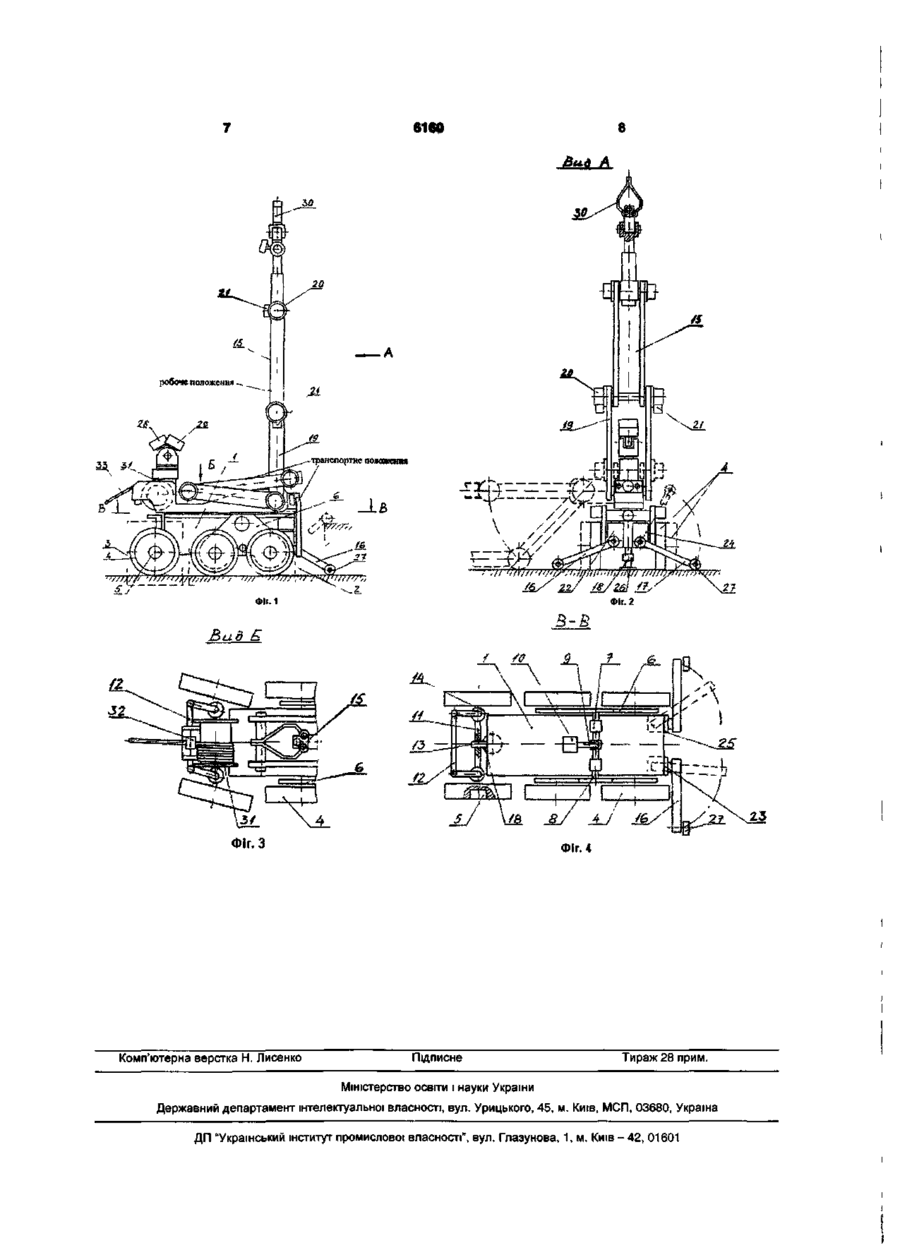
1. Дистанційно-керований транспортний засіб, що містить корпус і установлені на його бічних стінках передні і задні колісні рушії, причому кожний з передніх рушіїв оснащено коромислом з розташованими на його кінцях ходовими колесами, коромисла виконані хитними відносно корпусу і через електромагнітні муфти з'єднані одне з одним за допомогою передньої горизонтальної траверси з можливістю повороту коліс навколо неї, а траверса жорстко зв'язана з важелем, установленим між електромагнітними муфтами, другий кінець якого з'єднано зі штоком його приводу, а кожний із задніх рушіїв оснащено одним ходовим колесом, колеса з'єднані одне з одним за допомогою задньої горизонтальної траверси, вільно насадженої в її середній частині на вісь, нормальної до неї, з можливістю повороту коліс навколо осі, і кермової трапеції з розміщеними на її кінцях приводами повороту задніх рушіїв, при цьому кожне ходове колесо оснащено індивідуальним приводом і на корпусі встановлено кабельний барабан із приводом і кабелеукладачем, який відрізняється тим, що на корпусі встановлені маніпулятор, виконаний багатоланковим, і виносні опори, причому ланки маніпулятора з'єднані між собою за допомогою шарнірних зчленувань з розташуванням у них приводів ланок, а дві виносні опори, кожна з яких оснащена двома приводами, розміщені на передній стороні корпусу з можливістю їхньої довільної орієнтації в просторі відносно опорної поверхні, третя опора з одним приводом розміщена на задній стороні корпусу і виконана у вигляді домкрата, при цьому контактна поверхня кожної опори з двома приводами утворена роликом, вільно установленим у ній. 2. Транспортний засіб за п.1, який відрізняється тим, що оснащений телевізійними камерами, а маніпулятор має пристрої для дослідження навколишнього середовища, у тому числі - захват. CO S Корисна модель відноситься до транспортних засобів з колісними рушіями підвищеної прохідності і може бути використана, зокрема, в умовах техногенних аварій на підприємствах ядерної енергетики зі складним станом споруджень, устаткування, поверхонь, що підстилають, із завалами й іншими перешкодами. Відомі транспортні засоби з піднімальною стрілою [В.Й. Чернега, И.Я. Мазуренко. Краткий справочник по грузоподъемным машинам. Киев, «Техника», 1988г., с.78-79; С П . Епифанов, В.И. Поляков. Краны стреловые пневмоколесные и гусеничные. М., издательство «Высшая школа», 1971г., с.258, рис.149], що містять ходову частину у вигляді опорної рами на колесах, привод, підні мальну стрілу і виносні опори. Недоліком названих засобів є те, що вони не можуть використовуватися для подолання складних перешкод, мають низьку надійність при русі по похилій нерівній поверхні, а також вимагають при їхній роботі установки виносних опор на плоску горизонтальну поверхню, при цьому опори можуть установлюватися тільки вручну. Найбільш близьким по технічній сутності до засобу, що заявляється, є транспортний засіб [патент України №50166 «Транспортний засіб з колісними рушіями», кл. B62D57/028, 2002р. бюл. №10], що містить корпус, установлені на його бічних стінках передні і задні КОЛІСНІ рушії, причому кожний з передніх рушіїв оснащено коромислом з розташо < 6Г 6160 ваними на його кінцях ходовими колесами, коромисла виконані хитними відносно корпуса і через електромагнітні муфти з'єднані один з одним за допомогою передньої горизонтальної траверси з можливістю повороту коліс навколо неї, а траверса жорстко зв'язана з важелем, установленим між електромагнітними муфтами, другий кінець якого з'єднано зі штоком його приводу, а кожний із задніх рушіїв оснащено одним ходовим колесом, колеса з'єднані один з одним за допомогою задньої горизонтальної траверси, вільно насадженої в її середній частині на вісь нормальної до неї з можливістю повороту коліс навколо осі, і кермової трапеції з розміщеними на її кінцях приводами повороту задніх рушіїв, при цьому кожне ходове колесо оснащено індивідуальним приводом і на корпусі встановлено кабельний барабан із приводом і кабелеукладачем. Цей транспортний засіб здатний переборювати різні складні перешкоди в умовах техногенних аварій на атомних електростанціях, однак воно не має пристроїв, приміром, дистанційно-керованих маніпуляторів, які могли б проводити різні дослідження навколишнього середовища при русі транспортного засобу, а також при його зупинці серед завалів, і зокрема, коли виникає необхідність підвищення його стійкості шляхом використання яких-небудь опорних пристроїв, також керованих дистанційно. В основу корисної моделі покладена задача створення дистанційно-керованого транспортного засобу з багатоцільовим маніпулятором і опорними, приміром, виносними, пристроями, які могли б забезпечити його стійкість навіть при їхній установці на нерівну поверхню, а також використовуватися при подоланні їм складного рельєфу. Поставлена задача вирішується так, що в дистанційно-керованому транспортному засобі, що містить корпус і установлені на його бічних стінках передні і задні колісні рушії, причому кожний з передніх рушіїв оснащено коромислом з розташованими на його кінцях ходовими колесами, коромисла виконані хитними відносно корпуса і через електромагнітні муфти з'єднані один з одним за допомогою передньої горизонтальної траверси з можливістю повороту коліс навколо неї, а траверса жорстко зв'язана з важелем, установленим між електромагнітними муфтами, другий кінець якого з'єднано зі штоком його привода, а кожний із задніх рушіїв оснащено одним ходовим колесом, колеса з'єднані один з одним за допомогою задньої горизонтальної траверси, вільно насадженої в її середній частині на вісь, нормальної до неї, з можливістю повороту коліс навколо осі, і кермової трапеції з розміщеними на її кінцях приводами повороту задніх рушіїв, при цьому кожне ходове колесо оснащено індивідуальним приводом і на корпусі встановлено кабельний барабан із приводом і кабелеукладачем, новим є те, що на корпусі встановлені маніпулятор, виконаний багатоланковим, і виносні опори, причому ланки маніпулятора з'єднані між собою за допомогою шарнірних зчленувань з розташуванням у них приводів ланок, а дві виносні опори, кожна з яких постачена двома приводами, розміщені на передній стороні корпуса з можливістю їхньої довільної орієнтації в просторі відносно опорної поверхні, а третя опора з одним приводом розміщена на задній стороні корпуса і виконана у вигляді домкрата, при цьому контактна поверхня кожної опори з двома приводами утворена роликом, вільно установленим у ній, і крім того, транспортний засіб постачено телевізійними камерами, а маніпулятор має пристрої для дослідження навколишнього середовища, у тому числі схват. Використання запропонованого транспортного засобу дозволить підвищити надійність і ефективність його роботи в екстремальних умовах, що можуть виникнути при техногенних аваріях на підприємствах, небезпечних для здоров'я людини. Загальний вигляді запропонованого транспортного засобу приведений на Фіг. 1, на Фіг.2 показаний вид А Фіг. 1, на Фіг.З - вид БФіг.1, на Фіг.4 - переріз В-В Фіг.1. До складу розглянутого транспортного засобу входять корпус 1, передні 2 і задні 3 рушії з ходовими колесами 4, керованими за допомогою приводів 5. Кожний з передніх рушіїв 2 оснащено хитним коромислом 6 із установленими на його кінцях колесами 4. Коромисла 6 через електромагнітні муфти 7 з'єднані один з одним за допомогою горизонтальної траверси 8 з жорстко зв'язаним з нею важелем 9, встановленим у її середній частині між електромагнітними муфтами 7, другий кінець якого з'єднано зі штоком його привода 10. Колеса 4 задніх рушіїв 3 з'єднані один з одним за допомогою задньої горизонтальної траверси 11 і кермової трапеції 12, необхідної для керування переміщенням транспортного засобу. Траверса 11 у своїй середній частині вільно насаджена на вісь 13, нормальну до неї, та жорстко прикріплена до корпусу 1, з можливістю повороту довкола нього коліс 4 задніх рушіїв 3. На кінцях кермової трапеції 12 розміщені приводи 14 повороту задніх рушіїв З, при цьому приводи 14 зв'язані з траверсою 11. На транспортному засобі встановлено багатоланковий маніпулятор 15, передні виносні опори 16 і 17 і задня виносна опора 18. Маніпулятор 15 складається з декількох ланок 19, що дозволяє надавати йому різне положення в просторі, а також складатися в горизонтальне положення при транспортуванні засобу. Ланки 19 маніпулятора 15 з'єднані один з одним за допомогою шарнірних зчленувань 20, у яких розташовані приводи 21 ланок 19. Опори 16 і 17 розміщені на передній стороні корпуса 1 і можуть займати різне положення в просторі, що досягається установкою в кожній з опор 16 і 17 двох приводів - відповідно 22, 23 і 24, 25. Опора 18 розміщена на задній стороні корпуса 1 і виконана у вигляді домкрата зі зміною її положення по висоті, для чого використовується привод 26. Контактна поверхня опор 16117 утворена роликами 27, вільно встановленими в них. Маніпулятор 15 постачений телевізійними камерами 28 і 29, а також різними пристроями, наприклад, схватом ЗО, для дослідження навколишнього простору. На корпусі 1 установлено кабельний барабан 31 із приводом, кабелеукладачем 32 і кабелем 33. Робота запропонованого транспортного засобу здійснюється таким чином. 6160 Керування рухом транспортного засобу, установкою опор 16, 17 і 18 і роботою маніпулятора 15 відбувається дистанційно при подачі сигналу з пульта керування, розташованого в безпечній зоні. При включенні приводів 5 рушіїв 2 і 3 транспортний засіб починає рух в умовах складного рельєфу поверхні, що підстилає. При його переміщенні розмотується кабель 33 з кабельного барабана 31 після включення його привода, за допомогою якого здійснюється також рух кабелеукладача 32. Зустрічаючись з невеликою перешкодою (западиною або височиною), транспортний засіб переборює її при відключених електромагнітних муфтах 7, при цьому коромисла 6 із установленими на їхніх кінцях колесами 4 роблять хитний рух малої амплітуди відносно корпуса 1 навколо осі траверси 8. При зустрічі транспортного засобу з перешкодою більшої величини включаються або дві електромагнітні муфти 7, або одна, при цьому відбувається з'єднання коромисел (коромисла) 6 із середньою частиною траверси 8, жорстко з'єднаної з важелем 9, за допомогою якого після приведення в дію приводу 10 здійснюється поворот коромисел (коромисла) 6 у ту або іншу сторону навколо осі траверси 8, завдяки чому колеса 4 одержують можливість наїжджати на перешкоду і переборювати її. Таким чином, транспортний засіб наїжджає на перешкоду (з'їжджає з неї) колесами 4 або двох передніх рушіїв 2, або одним. Колеса 4 задніх рушіїв 3, як і колеса 4 передніх рушіїв 2, приводяться в обертання за допомогою індивідуальних приводів 5, при цьому колеса 4 задніх рушіїв 3, які з'єднані один з одним за допомогою горизонтальної траверси 11 і кермової трапеції 12, керованої приводами 14, роблять хитні рухи навколо осі 13, тобто відносно корпуса 1, а також при подачі сигналу керування на приводи 14 відбувається поворот коліс 4 у ту або іншу сторону за допомогою кермової трапеції 12, що дозволяє керувати переміщенням транспортного засобу. При його поверненні у початкове положення кабель 33 намотується на кабельний барабан 31 з використанням кабелеукладача 32. Для проведення досліджень навколишнього простору транспортний засіб зупиняється, після чого оператором з пульта керування послідовно подаються сигнали приводам 22, 23 і 24, 25 передніх виносних опор 16 і 17 відповідно, а також приводу 26 задньої опори 18. Переміщення названих опор у просторі і їх установка в різних положеннях відносно опорної поверхні (приміром, підлоги з хаотичним нагромадженням яких-небудь предметів) дозволяє додати транспортному засо бові необхідну стійкість при роботі маніпулятора 15 з його високо розташованим центром ваги. Опори 16 і 17 можуть переміщатися у двох взаємно перпендикулярних площинах (горизонтальній і вертикальній), а опора 18-у вертикальній площині, причому кожна з цих опор може встановлюватися на різних відстанях від опорної поверхні (поверхонь). Наявність трьох опорних точок дозволяє відгоризонтувати транспортний засіб у разі необхідності визначення координат предметів, які візуються відносно системи координат, яка лежить у горизонтальній площині, при цьому опора 18 використовується як домкрат. При подоланні складних перешкод опори 16 і 17 переміщуються у вертикальній площині і їх елементи використовуються як додаткові колеса, роль яких у даному випадку виконують ролики 27: наїжджуючи, приміром, на уступ, ролики 27 допомагають обертовим ходовим колесам 4 передніх 2 і задніх 3 рушіїв підніматися на перешкоду і переборювати її. У залежності від умов переміщення транспортного засобу, у т.ч. - від питомого навантаження, приміром, на ґрунт, він оснащений широкими і вузькими ходовими колесами 4, а також - гусеницями (на кресленні не показано), які встановлюються на ці колеса. Заміна одних коліс на інші й установка на них гусениць провадиться в безпечній зоні з використанням опор 16, 17 і 18. Маніпулятор 15, оснащений різними пристроями, наприклад, схватом ЗО, при подачі сигналу на приводи 21 будь-якого з ланок 19 приймає різне положення в просторі, у т.ч. - може переміщатися декількома ланками по поверхні, що підстилає (на Фіг.2 показане пунктирними лініями), а при переміщенні транспортного засобу при необхідності укладається на його верхній поверхні. Таким чином, зона обслуговування простору транспортним засобом являє собою величину, яка більше півсфери з радіусом, рівним загальній довжині маніпулятора 15. Маніпулятор 15 виконує різні роботи: збирає всілякі предмети, проникає у важкодоступні місця (положення маніпулятора, показане на Фіг.2 пунктирними лініями), на ньому встановлюються пристрої і прилади для визначення координат предметів і ступені забруднення їх радіоактивними речовинами в різних точках простору, для узяття проб повітря, і інші операції, причому візуальне спостереження за проведенням технологічних операцій здійснюється за допомогою телевізійних камер 28 і 29. Подача електричного живлення до приводів транспортного засобу здійснюється з пульта керування за допомогою кабелю 33. Вид A транспортне положеная 33 З/ Лв Фіг. 1 Sue E Фіг. З Комп'ютерна верстка Н. Лисенко Фіг. 4 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRemotely controlled vehicle with multipurpose manipulator
Автори англійськоюKarpachov Yurii Andriiovych, Savenko Yurii Mykolaiovych, Rowland Mark Stefan, Smith Crage F., Zakharenko Anatolii Oleksandrovych
Назва патенту російськоюДистанционно-управляемое транспортное средство с многоцелевым манипулятором
Автори російськоюКарпачев Юрий Андреевич, Савенко Юрий Николаевич, Роуланд Марк Стефан, Смит Крейг Ф., Захаренко Анатолий Александрович
МПК / Мітки
МПК: B62D 57/00, B25J 5/00
Мітки: багатоцільовим, транспортний, маніпулятором, засіб, дистанційно-керований
Код посилання
<a href="https://ua.patents.su/4-6160-distancijjno-kerovanijj-transportnijj-zasib-z-bagatocilovim-manipulyatorom.html" target="_blank" rel="follow" title="База патентів України">Дистанційно-керований транспортний засіб з багатоцільовим маніпулятором</a>
Транспортний засіб з колісними рушіями
Номер патенту: 63227
Опубліковано: 15.01.2004
Автори: Карпачов Юрій Андрійович, Петухов Олександр Михайлович, Савенко Юрій Миколайович, Роуланд Марк Стефан, Захаренко Анатолій Олександрович, Сміт Крейг Ф.
МПК: B62D 57/00
Мітки: засіб, рушіями, транспортний, колісними
Формула / Реферат:
Транспортний засіб з колісними рушіями, що містить корпус, на бічних стінках якого встановлені передні і задні колісні рушії, кожний з яких оснащений коромислом з розташованими на його кінцях ходовими колесами, кінематично зв'язаними з валом приводу, при цьому коромисла виконані хитними відносно корпусу, коромисла передніх рушіїв з'єднані один з одним за допомогою горизонтальної траверси, встановленої в її середній частині в поворотному...
Транспортний засіб з колісними рушіями
Номер патенту: 50166
Опубліковано: 15.10.2002
Автори: Захаренко Анатолій Олександрович, Савенко Юрій Миколайович, Карпачов Юрій Андрійович, Павлюк Володимир Миколайович
МПК: B62D 57/00
Мітки: колісними, засіб, рушіями, транспортний
Формула / Реферат:
1. Транспортний засіб з колісними рушіями, що містить корпус, установлені на його бічних стінках передні колісні рушії, кожний з яких оснащений коромислом з розташованими на його кінцях ходовими колесами, і задні колісні рушії, який відрізняється тим, що коромисла виконані хитними відносно корпуса, при цьому вони через електромагнітні муфти з’єднані одне з одним за допомогою передньої горизонтальної траверси з жорстко зв’язаним з нею важелем,...
Самоскидний транспортний засіб

Номер патенту: 30499
Опубліковано: 15.11.2000
Автори: Сабсай Володимир Давидович, Кисельов Олексій Васильович
МПК: B60P 1/04
Мітки: засіб, транспортний, самоскидний
Формула / Реферат:
Самоскидний транспортний засіб, який містить розміщений на рамі поворотний кузов з противагою, ось повороту якого розташована в вертикальній площині, та фіксатор транспортного положення кузова, який відрізняється тим, що противага виконана у вигляді сполучених ємностей для рідини, розташованих в передній і задній частині кузова, а вісь повороту проходить через центр ваги кузова.
Транспортний засіб, переважно моторолер

Номер патенту: 33337
Опубліковано: 15.02.2001
Автор: Босак Олександр Валер'янович
МПК: B62K 11/00, A63H 17/00, A63H 27/00, B62K 15/00
Мітки: засіб, транспортний, моторолер, переважно
Текст:
...рами* просто на нового зверху при опусканні передньої частини рами можна сідати ,колеса теж знаходяться при складанні у коробі, цей транспортний засіб має неабиякі зменшені габарити та вагу і тому його можна перекосити у руках, Б рюкзаку чи котити як теліжку, а значить і тримати у себе вдома, гараж тут не необхідний. Зрозуміло, що в гілому ия конструкція зручна і проста в експлуатації і обслуговуванні. Винахід пояснюється кресленнями, де на...
Транспортний засіб з колісними рушіями

Номер патенту: 47768
Опубліковано: 15.07.2002
Автори: Петухов Олександр Михайлович, Березнюк Володимир Володимирович, Захаренко Анатолій Олександрович, Савенко Юрій Миколайович, Карпачов Юрій Андрійович
МПК: B62D 57/00
Мітки: колісними, транспортний, засіб, рушіями
Формула / Реферат:
1. Транспортний засіб з колісними рушіями, що містить корпус, на бічних стінках якого встановлені передні і задні колісні рушії, кожний з яких оснащений коромислом з розташованими на його кінцях ходовими колесами, кінематично зв'язаними з валом приводу, який відрізняється тим, що коромисла виконані хитними відносно корпусу , при цьому коромисла передніх рушіїв з'єднані один з одним за допомогою горизонтальної траверси, встановленої в її...
Попередній патент: Штам бактерій azotobacter vinelandii 7-кв для одержання бактеріального добрива для рослинництва
Наступний патент: Спосіб ремонту за технічним станом і модернізації авіаційного двигуна
Випадковий патент: Телескопічна система фіксації