Спосіб вимірювання параметрів тиристорних електроприводів та пристрій для його реалізації
Номер патенту: 64218
Опубліковано: 16.02.2004
Автори: Сидоренко Валерій Миколайович, Лашко Юрій Вікторович, Чорний Олексій Петрович, Ковирін Олексій Миколайович, Родькін Дмитро Йосипович
Формула / Реферат
1. Спосіб вимірювання параметрів тиристорних електроприводів, який полягає у тому, що електромеханічний перетворювач постійного або змінного струму підключають до джерела промислової частоти через тиристорний регулятор напруги, здійснюють вимірювання та запис миттєвих значень струму та напруги за допомогою датчиків струму і напруги з заданою дискретністю ![]() , визначають середні, ефективні, максимальні значення, гармонійний склад на інтервалі повторюваності процесів, який відрізняється тим, що з метою підвищення точності і достовірності вимірювань у міру запису сигналу знаходять інтервали часу, на яких відбувається зміна похідної сигналу струму, що супроводжується стрибком напруги і відповідає моментам включення тиристорів, знаходять моменти включення тиристорів і закінчення інтервалів комутації як точку перетину екстраполюючих поліномів на гладких ділянках сигналу струму, обчислюють новий інтервал дискретизації для дискретних сигналів струму і напруги
, визначають середні, ефективні, максимальні значення, гармонійний склад на інтервалі повторюваності процесів, який відрізняється тим, що з метою підвищення точності і достовірності вимірювань у міру запису сигналу знаходять інтервали часу, на яких відбувається зміна похідної сигналу струму, що супроводжується стрибком напруги і відповідає моментам включення тиристорів, знаходять моменти включення тиристорів і закінчення інтервалів комутації як точку перетину екстраполюючих поліномів на гладких ділянках сигналу струму, обчислюють новий інтервал дискретизації для дискретних сигналів струму і напруги ![]() , корегують первісні сигнали за рахунок синхронізації моментів включення тиристорів і закінчення інтервалу комутації з дискретністю
, корегують первісні сигнали за рахунок синхронізації моментів включення тиристорів і закінчення інтервалу комутації з дискретністю ![]() за допомогою відомих методів інтерполяції і екстраполяції у випадку незашумленого сигналу і методів робастної регресії для випадку наявності шумів, виконують гармонійний аналіз скорегованих сигналів на інтервалі повторюваності процесів, виконують розрахунок параметрів електромеханічного перетворювача, визначають миттєві значення потужності у формі:
за допомогою відомих методів інтерполяції і екстраполяції у випадку незашумленого сигналу і методів робастної регресії для випадку наявності шумів, виконують гармонійний аналіз скорегованих сигналів на інтервалі повторюваності процесів, виконують розрахунок параметрів електромеханічного перетворювача, визначають миттєві значення потужності у формі:
![]() ,
,
застосовують отримані математичні вирази для діагностики параметрів електромеханічних систем з використанням енергетичних критеріїв.
2. Пристрій для реалізації способу за п. 1, що містить електромеханічний перетворювач, регулятор напруги, блок задання сигналу керування, блоки датчиків напруги, блоки датчиків струму, АЦП, ЕОМ з блоком відображення інформації відрізняється тим, що до нього додатково введений комутатор і двовходовий екстраполятор, причому вихід блока датчиків напруги з'єднаний з першим входом АЦП, другий вхід якого з'єднаний з виходом блока датчиків струму, вихід АЦП через комутатор з'єднаний з першим та другим входами двовходового екстраполятору вихід якого з'єднаний з першим входом ЕОМ, другий вхід якого з'єднаний з виходом АЦП, другий вихід якого з'єднаний з блоком відображення інформації, а перший керуючий вихід якого з другим входом комутатора і третім входом АЦП.
3. Пристрій для реалізації способу за п. 2, який відрізняється тим, що виходи блоку датчиків напруги з'єднані з першим, третім, п'ятим входами АЦП, до другого, четвертого, шостого входів якого підключені виходи блоку датчиків струму, вихід АЦП через комутатор з'єднаний з першим та другим входами двовходового екстраполятора, вихід якого з'єднаний з першим входом ЕОМ, другий вхід якого з'єднаний з виходом АЦП, другий вихід якого з'єднаний з блоком відображення інформації, а перший керуючий вхід з другим входом комутатора і сьомим входом АЦП.
4. Пристрій, що реалізує спосіб за пп. 2, 3, який відрізняється тим, що двовходовий екстраполятор може бути виконаний на базі ЕОМ, що програмується.
Текст
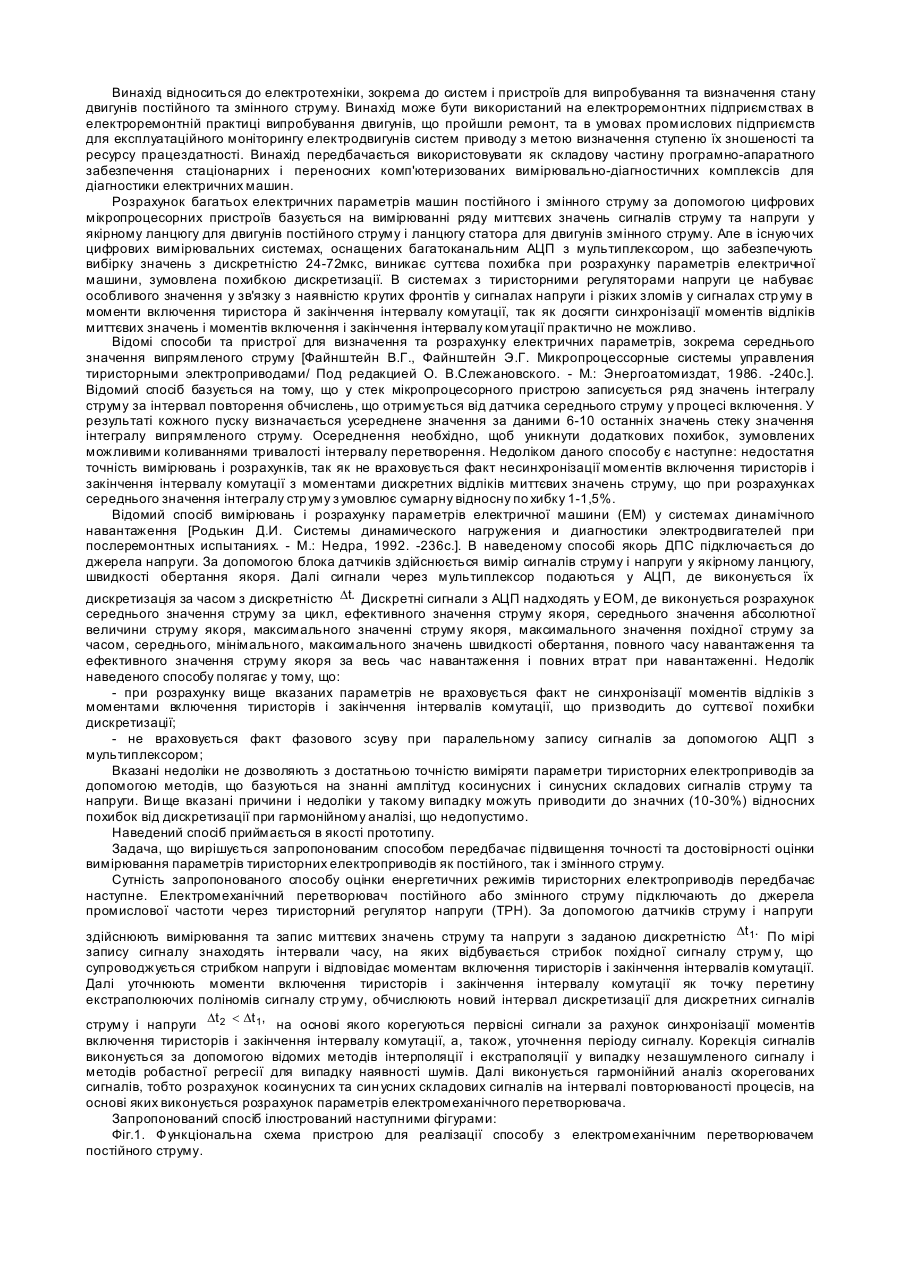
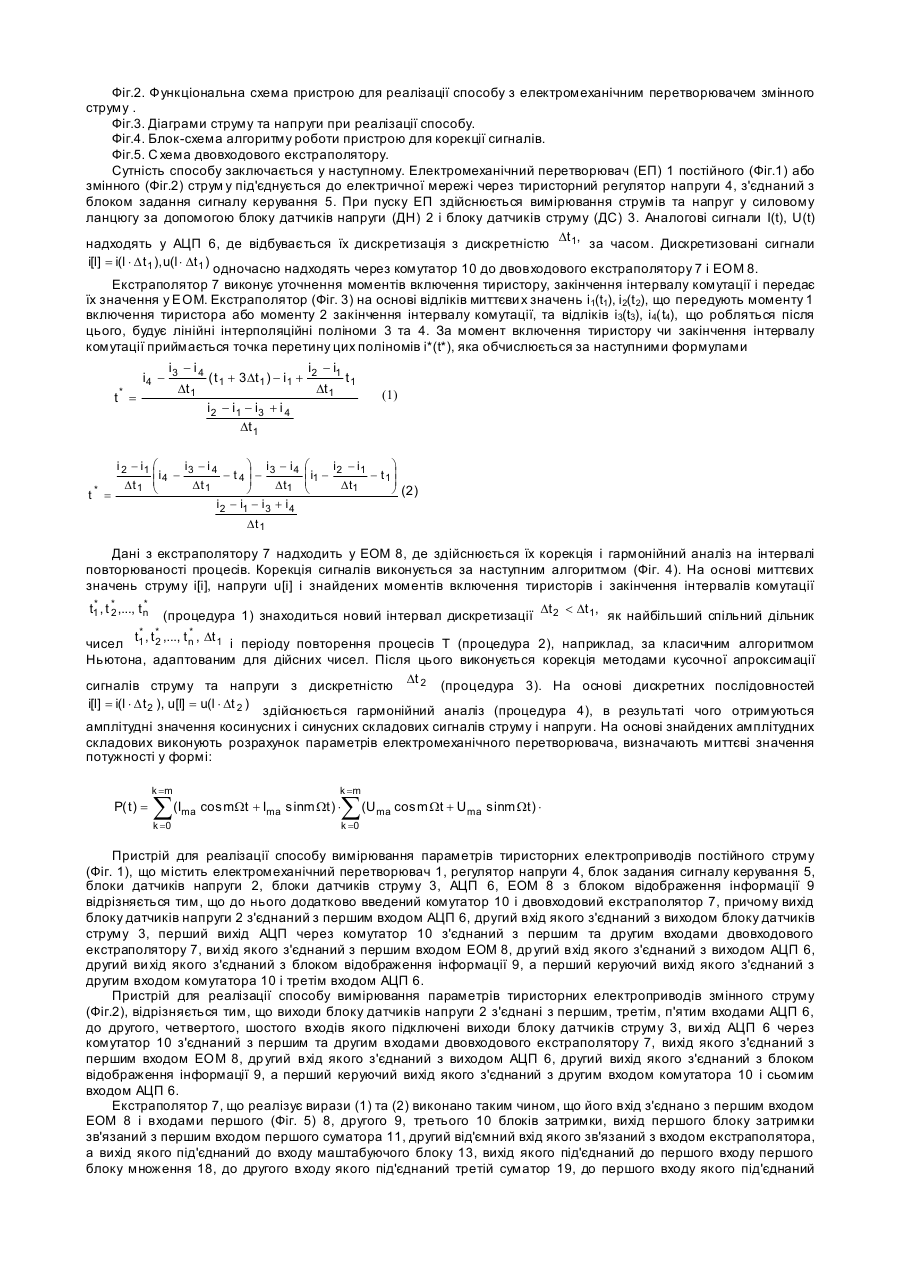
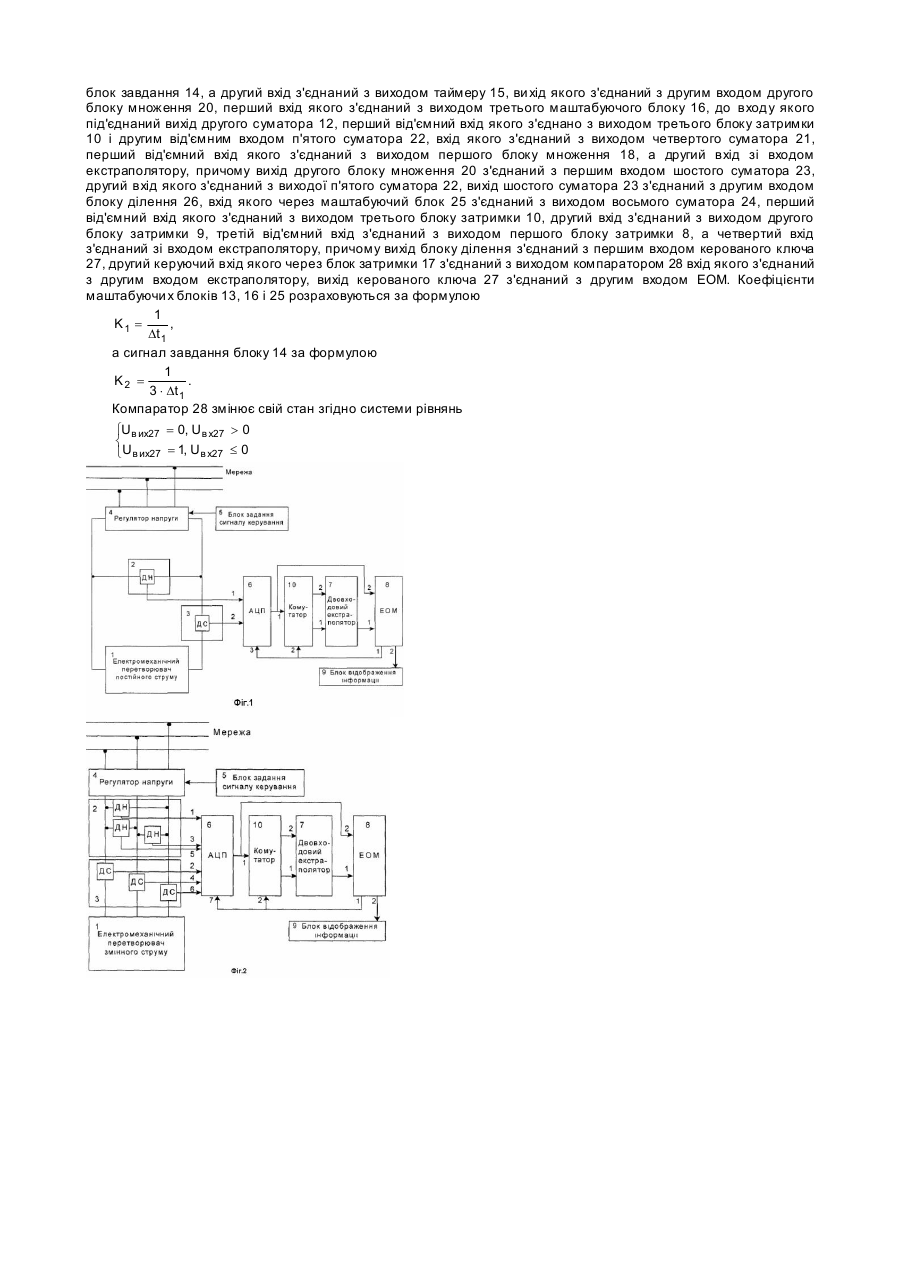
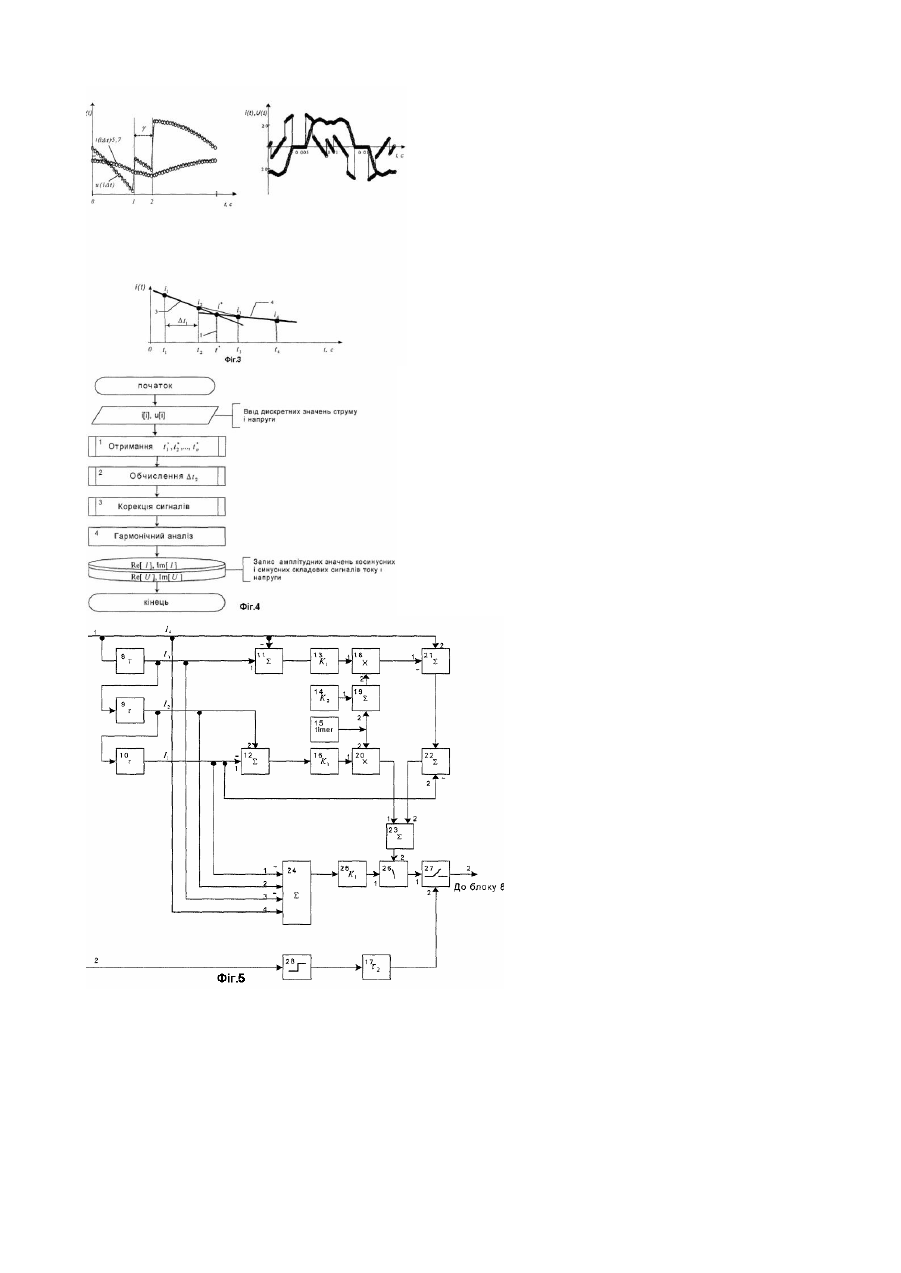
Винахід відноситься до електротехніки, зокрема до систем і пристроїв для випробування та визначення стану двигунів постійного та змінного струму. Винахід може бути використаний на електроремонтних підприємствах в електроремонтній практиці випробування двигунів, що пройшли ремонт, та в умовах промислових підприємств для експлуатаційного моніторингу електродвигунів систем приводу з метою визначення ступеню їх зношеності та ресурсу працездатності. Винахід передбачається використовувати як складову частину програмно-апаратного забезпечення стаціонарних і переносних комп'ютеризованих вимірювально-діагностичних комплексів для діагностики електричних машин. Розрахунок багатьох електричних параметрів машин постійного і змінного струму за допомогою цифрових мікропроцесорних пристроїв базується на вимірюванні ряду миттєвих значень сигналів струму та напруги у якірному ланцюгу для двигунів постійного струму і ланцюгу статора для двигунів змінного струму. Але в існуючих цифрових вимірювальних системах, оснащених багатоканальним АЦП з мультиплексором, що забезпечують вибірку значень з дискретністю 24-72мкс, виникає суттєва похибка при розрахунку параметрів електричної машини, зумовлена похибкою дискретизації. В системах з тиристорними регуляторами напруги це набуває особливого значення у зв'язку з наявністю крутих фронтів у сигналах напруги і різких зломів у сигналах стр уму в моменти включення тиристора й закінчення інтервалу комутації, так як досягти синхронізації моментів відліків миттєвих значень і моментів включення і закінчення інтервалу комутації практично не можливо. Відомі способи та пристрої для визначення та розрахунку електричних параметрів, зокрема середнього значення випрямленого струму [Файнштейн В.Г., Файнштейн Э.Г. Микропроцессорные системы управления тиристорными электроприводами/ Под редакцией О. В.Слежановского. - М.: Энергоатомиздат, 1986. -240с.]. Відомий спосіб базується на тому, що у стек мікропроцесорного пристрою записується ряд значень інтегралу струму за інтервал повторення обчислень, що отримується від датчика середнього струму у процесі включення. У результаті кожного пуску визначається усереднене значення за даними 6-10 останніх значень стеку значення інтегралу випрямленого струму. Осереднення необхідно, щоб уникнути додаткових похибок, зумовлених можливими коливаннями тривалості інтервалу перетворення. Недоліком даного способу є наступне: недостатня точність вимірювань і розрахунків, так як не враховується факт несинхронізації моментів включення тиристорів і закінчення інтервалу комутації з моментами дискретних відліків миттєвих значень струму, що при розрахунках середнього значення інтегралу стр уму з умовлює сумарну відносну по хибку 1-1,5%. Відомий спосіб вимірювань і розрахунку параметрів електричної машини (ЕМ) у системах динамічного навантаження [Родькин Д.И. Системы динамического нагружения и диагностики электродвигателей при послеремонтных испытаниях. - М.: Недра, 1992. -236с.]. В наведеному способі якорь ДПС підключається до джерела напруги. За допомогою блока датчиків здійснюється вимір сигналів струму і напруги у якірному ланцюгу, швидкості обертання якоря. Далі сигнали через мультиплексор подаються у АЦП, де виконується їх дискретизація за часом з дискретністю Dt. Дискретні сигнали з АЦП надходять у ЕОМ, де виконується розрахунок середнього значення струму за цикл, ефективного значення струму якоря, середнього значення абсолютної величини струму якоря, максимального значенні струму якоря, максимального значення похідної струму за часом, середнього, мінімального, максимального значень швидкості обертання, повного часу навантаження та ефективного значення струму якоря за весь час навантаження і повних втрат при навантаженні. Недолік наведеного способу полягає у тому, що: - при розрахунку вище вказаних параметрів не враховується факт не синхронізації моментів відліків з моментами включення тиристорів і закінчення інтервалів комутації, що призводить до суттєвої похибки дискретизації; - не враховується факт фазового зсуву при паралельному запису сигналів за допомогою АЦП з мультиплексором; Вказані недоліки не дозволяють з достатньою точністю виміряти параметри тиристорних електроприводів за допомогою методів, що базуються на знанні амплітуд косинусних і синусних складових сигналів струму та напруги. Ви ще вказані причини і недоліки у такому випадку можуть приводити до значних (10-30%) відносних похибок від дискретизації при гармонійному аналізі, що недопустимо. Наведений спосіб приймається в якості прототипу. Задача, що вирішується запропонованим способом передбачає підвищення точності та достовірності оцінки вимірювання параметрів тиристорних електроприводів як постійного, так і змінного струму. Сутність запропонованого способу оцінки енергетичних режимів тиристорних електроприводів передбачає наступне. Електромеханічний перетворювач постійного або змінного струму підключають до джерела промислової частоти через тиристорний регулятор напруги (ТРН). За допомогою датчиків струму і напруги здійснюють вимірювання та запис миттєвих значень струму та напруги з заданою дискретністю Dt 1. По мірі запису сигналу знаходять інтервали часу, на яких відбувається стрибок похідної сигналу струм у, що супроводжується стрибком напруги і відповідає моментам включення тиристорів і закінчення інтервалів комутації. Далі уточнюють моменти включення тиристорів і закінчення інтервалу комутації як точку перетину екстраполюючих поліномів сигналу стр уму, обчислюють новий інтервал дискретизації для дискретних сигналів струму і напруги Dt 2 < Dt 1, на основі якого корегуються первісні сигнали за рахунок синхронізації моментів включення тиристорів і закінчення інтервалу комутації, а, також, уточнення періоду сигналу. Корекція сигналів виконується за допомогою відомих методів інтерполяції і екстраполяції у випадку незашумленого сигналу і методів робастної регресії для випадку наявності шумів. Далі виконується гармонійний аналіз скорегованих сигналів, тобто розрахунок косинусних та син усних складових сигналів на інтервалі повторюваності процесів, на основі яких виконується розрахунок параметрів електромеханічного перетворювача. Запропонований спосіб ілюстрований наступними фігурами: Фіг.1. Функціональна схема пристрою для реалізації способу з електромеханічним перетворювачем постійного струму. Фіг.2. Функціональна схема пристрою для реалізації способу з електромеханічним перетворювачем змінного струму . Фіг.3. Діаграми струму та напруги при реалізації способу. Фіг.4. Блок-схема алгоритму роботи пристрою для корекції сигналів. Фіг.5. С хема двовходового екстраполятору. Сутність способу заключається у наступному. Електромеханічний перетворювач (ЕП) 1 постійного (Фіг.1) або змінного (Фіг.2) струм у під'єднується до електричної мережі через тиристорний регулятор напруги 4, з'єднаний з блоком задання сигналу керування 5. При пуску ЕП здійснюється вимірювання струмів та напруг у силовому ланцюгу за допомогою блоку датчиків напруги (ДН) 2 і блоку датчиків струму (ДС) 3. Аналогові сигнали I(t), U(t) надходять у АЦП 6, де відбувається їх дискретизація з дискретністю Dt 1, за часом. Дискретизовані сигнали i[l] = i(l × D t 1 ), u(l × Dt 1 ) одночасно надходять через комутатор 10 до двовходового екстраполятору 7 і ЕОМ 8. Екстраполятор 7 виконує уточнення моментів включення тиристору, закінчення інтервалу комутації і передає їх значення у ЕОМ. Екстраполятор (Фіг. 3) на основі відліків миттєви х значень i1(t1), i2(t 2), що передують моменту 1 включення тиристора або моменту 2 закінчення інтервалу комутації, та відліків i3(t3), i4(t4), що робляться після цього, будує лінійні інтерполяційні поліноми 3 та 4. За момент включення тиристору чи закінчення інтервалу комутації приймається точка перетину цих поліномів i*(t*), яка обчислюється за наступними формулами t* = i4 i3 - i 4 i -i ( t 1 + 3Dt 1 ) - i1 + 2 1 t 1 Dt 1 Dt 1 i2 - i1 - i3 + i 4 Dt 1 ö i -i i 2 - i1 æ i -i ç i4 - 3 4 - t 4 ÷ - 3 4 ç ÷ Dt 1 è Dt 1 Dt1 * ø t = i 2 - i1 - i 3 + i 4 Dt 1 (1) æ ö i -i ç i1 - 2 1 - t 1 ÷ ç ÷ Dt1 è ø (2) Дані з екстраполятору 7 надходить у ЕОМ 8, де здійснюється їх корекція і гармонійний аналіз на інтервалі повторюваності процесів. Корекція сигналів виконується за наступним алгоритмом (Фіг. 4). На основі миттєвих значень струму i[i], напруги u[i] і знайдених моментів включення тиристорів і закінчення інтервалів комутації * * t1 , t * ,..., t n 2 (процедура 1) знаходиться новий інтервал дискретизації Dt 2
Додаткова інформація
Назва патенту англійськоюMethod for determining parameters of thyristor electric drive and the device for the realization of the method
Автори англійськоюRodkin Dmytro Yosypovych, Chornyi Oleksii Petrovych, Lashko Yurii Viktorovych
Назва патенту російськоюСпособ определения параметров тиристорного электропривода и устройство для осуществления способа
Автори російськоюРодькин Дмитрий Иосифович, Черный Алексей Петрович, Лашко Юрий Викторович
МПК / Мітки
МПК: G01R 31/34, G01R 31/00
Мітки: спосіб, тиристорних, електроприводів, параметрів, вимірювання, пристрій, реалізації
Код посилання
<a href="https://ua.patents.su/4-64218-sposib-vimiryuvannya-parametriv-tiristornikh-elektroprivodiv-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання параметрів тиристорних електроприводів та пристрій для його реалізації</a>
Спосіб вимірювання електричного струму і пристрій для його реалізації
Номер патенту: 58603
Опубліковано: 15.08.2003
Автори: Ходак Ілля Якович, Фішман Петро Вікторович, Іменохоєв Іван Володимирович
МПК: G01R 19/25
Мітки: електричного, струму, спосіб, вимірювання, пристрій, реалізації
Формула / Реферат:
1. Спосіб вимірювання електричного струму, при якому здійснюють трансформацію вимірюваного струму трансформатором струму, аналогово-цифрове перетворення вторинного струму, математичну обробку миттєвих поточних значень вимірюваного струму і видавання результатів до пристрою вимірювання та релейного захисту, який відрізняється тим, що вимірювання миттєвих значень вторинного струму здійснюють через малі рівні проміжки часу, миттєві поточні...
Спосіб передавання дискретної інформації з адаптацією до параметрів каналу зв’язку та пристрій для його реалізації
Номер патенту: 48411
Опубліковано: 15.08.2002
Автори: Квєтний Роман Наумович, Кривогубченко Денис Сергійович, Кривогубченко Сергій Григорович, Компанець Микола Миколайович, Кулик Анатолій Ярославович
МПК: H03M 13/00
Мітки: каналу, дискретної, зв'язку, інформації, адаптацією, передавання, реалізації, спосіб, пристрій, параметрів
Формула / Реферат:
1. Спосіб передавання дискретної інформації з адаптацією до параметрів каналу зв'язку, який включає зчитування байта інформації з носія, перетворення його на послідовний код і передавання до каналу зв'язку, який відрізняється тим, що на передавальному боці додатково визначають швидкість передавання інформації, визначають період вимірювань напруги завад у каналі зв'язку, визначають середнє значення напруги завад у каналі,...
Спосіб вимірювання малих висот польоту над землею та пристрій для його реалізації
Номер патенту: 48476
Опубліковано: 15.08.2002
Автори: Бахвалов Валентин Борисович, Порицький Сергій Леонідович
МПК: G01S 13/00, G01S 13/24
Мітки: малих, спосіб, польоту, землею, реалізації, пристрій, висот, вимірювання
Формула / Реферат:
1. Спосіб вимірювання малих висот польоту над землею, згідно з яким випромінюють з борту вниз неперервний сигнал зондування за допомогою бортової передавальної антени, приймають відбитий від землі сигнал бортовою приймальною антеною і фазовим вимірювачем вимірюють зсув фаз, який відрізняється тім, що випромінюють неперервний синусоїдальний сигнал постійної амплітуди на частоті короткохвильового або середньохвильового діапазону, приймають...
Спосіб вимірювання віброзміщень та пристрій для його реалізації
Номер патенту: 30843
Опубліковано: 15.11.2002
Автор: Сікора Любомир Степанович
МПК: G01B 9/00, G01H 9/00, G01B 11/00
Мітки: віброзміщень, вимірювання, спосіб, пристрій, реалізації
Формула / Реферат:
1. Спосіб вимірювання віброзміщень, який включає формування світлового променя, спрямування його на об'єкт вимірювання, проеціювання його у вигляді світлового знака на багатоканальний просторово розподілений в заданому геометричному базисі фотоприймач після відбиття його від поверхні об'єкта вимірювання, перетворення його в електричний сигнал, підсилення його та формування з нього сигналів, які відповідають віброзміщенню об'єкта вимірювання,...
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецький Віталій Анатолійович, Гнітецька Тетяна Віталіївна
МПК: G01F 23/296, G01F 23/28
Мітки: спосіб, локаційного, пристрій, відстані, ультразвукового, вимірювання, реалізації
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Попередній патент: Пристрій для відокремлення листового матеріалу зі стопи
Наступний патент: Лікувально-профілактичний засіб “катранол” і спосіб його отримання
Випадковий патент: Спосіб підвищення продуктивності свиней та поліпшення якості свинини за використання кормової добавки "бетаїн"