Електромеханічний привод
Номер патенту: 66271
Опубліковано: 26.12.2011
Автори: Дунаєв Вадім Ігорєвіч, Фєдосовскій Міхаіл Євгєньєвіч, Ніколаєв Вячєслав Вікторовіч

Формула / Реферат
1. Електромеханічний привод, що містить електродвигун, статор якого охоплює порожній ротор, ролики, оснащені зовнішньою різьбою і розміщені в порожнині ротора в різьбовій втулці по окружності так, що їхні осі є паралельними осі ротора, і вихідний шток, який відрізняється тим, що всередині ротора співвісно розміщений гвинт, що має зовнішню різьбу, що взаємодіє з різьбою роликів, яка також взаємодіє із внутрішньою різьбою зазначеної втулки, жорстко зв'язаної з одним кінцем вихідного штока, встановленого з утриманням від повороту, причому з одним кінцем гвинта жорстко зв'язаний ротор, а інший кінець гвинта розміщений у порожнині вихідного штока.
2. Електромеханічний привод за п. 1, у якому вихідний шток утримується від повороту навколо своєї поздовжньої осі протиротаційним пристроєм.
3. Електромеханічний привод за п. 1, у якому ротор встановлений у підшипниковому вузлі з можливістю попереднього натягу для усунення осьових люфтів.
4. Електромеханічний привод за п. 1, у якому взаємодія зовнішньої різьби гвинта із внутрішньою різьбою втулки, що здійснюється через зовнішню різьбу роликів, є безлюфтовою.
5. Електромеханічний привод за п. 1, у якому роликів дев'ять.
6. Електромеханічний привод за п. 1, у якому ролики розміщені в сепараторах, встановлених у різьбовій втулці.
7. Електромеханічний привод за п. 1, у якому вихідний шток має гладку поверхню.
8. Електромеханічний привод за п. 1, у якому хід вихідного штока обмежений пружними елементами, такими як тарілчасті пружини або гумові демпфери.
9. Електромеханічний привод за п. 1, у якому на роторі співвісно один за одним закріплені щонайменше два комплекти полюсних магнітів, охоплюваних відповідно щонайменше двома комплектами полюсних котушок статора, розміщених співвісно один за одним.
Текст
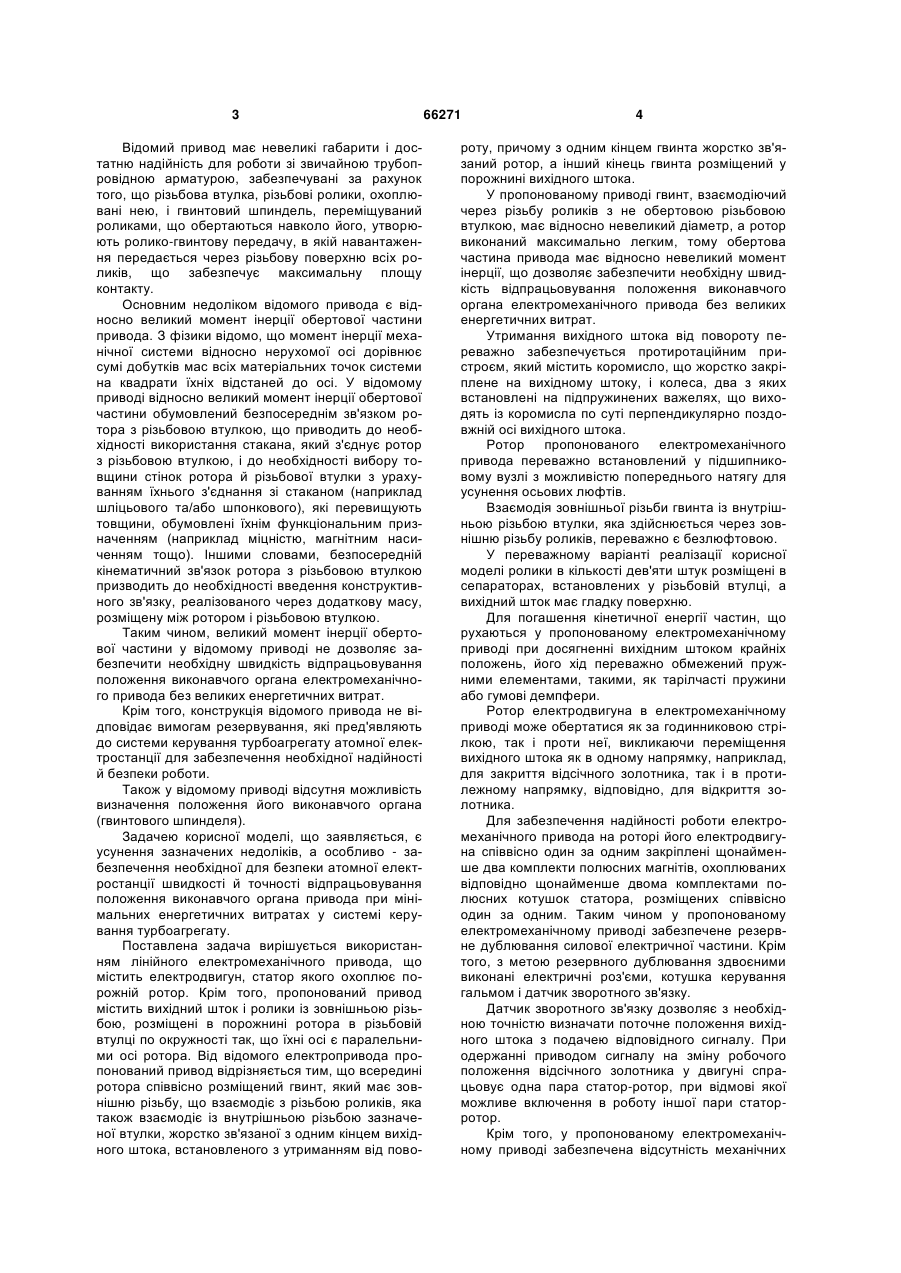
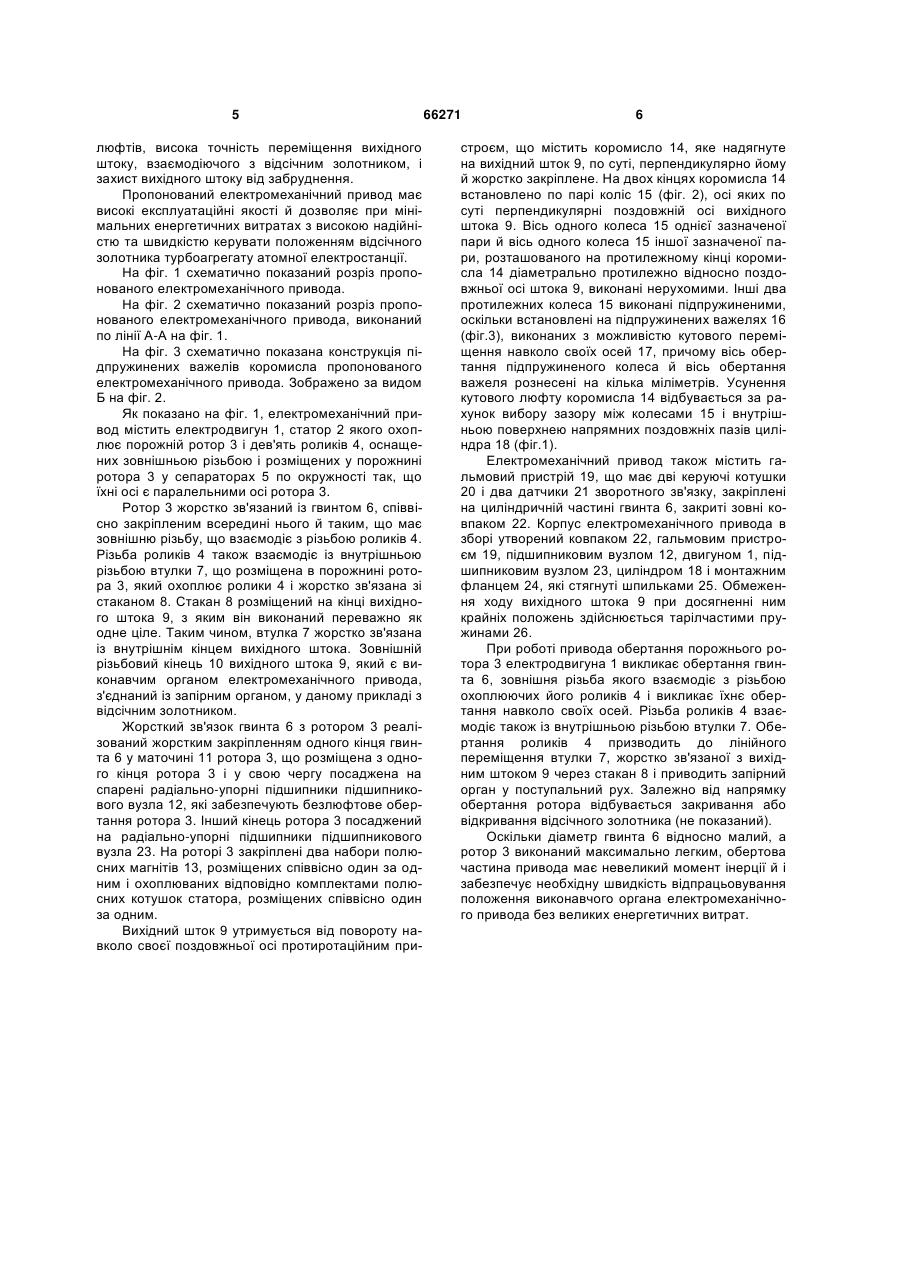
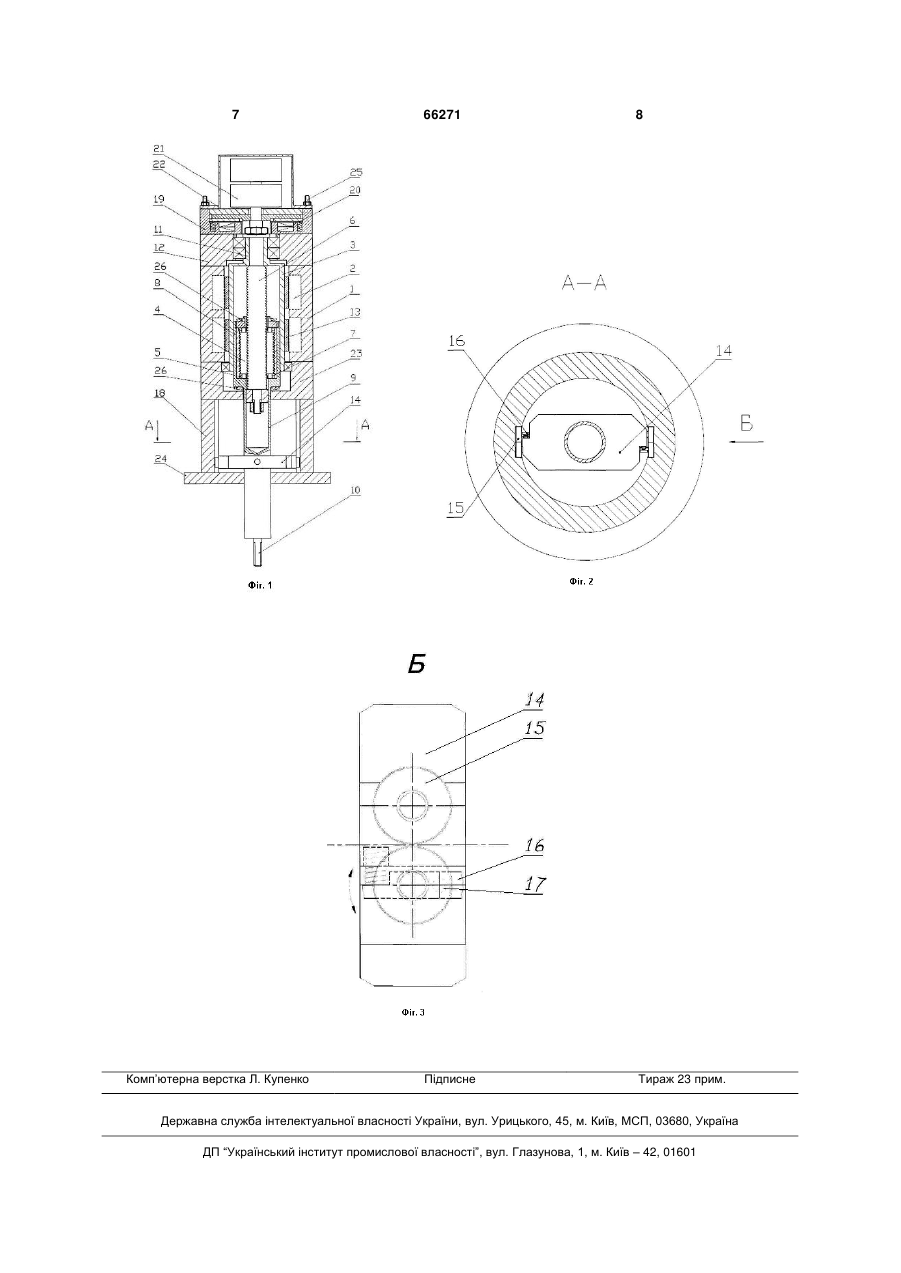
1. Електромеханічний привод, що містить електродвигун, статор якого охоплює порожній ротор, ролики, оснащені зовнішньою різьбою і розміщені в порожнині ротора в різьбовій втулці по окружності так, що їхні осі є паралельними осі ротора, і вихідний шток, який відрізняється тим, що всередині ротора співвісно розміщений гвинт, що має зовнішню різьбу, що взаємодіє з різьбою роликів, яка також взаємодіє із внутрішньою різьбою зазначеної втулки, жорстко зв'язаної з одним кінцем вихідного штока, встановленого з утриманням від повороту, причому з одним кінцем гвинта жорстко зв'язаний ротор, а інший кінець гвинта розміщений у порожнині вихідного штока. 2. Електромеханічний привод за п. 1, у якому вихідний шток утримується від повороту навколо своєї поздовжньої осі протиротаційним пристроєм. U 2 (19) 1 3 Відомий привод має невеликі габарити і достатню надійність для роботи зі звичайною трубопровідною арматурою, забезпечувані за рахунок того, що різьбова втулка, різьбові ролики, охоплювані нею, і гвинтовий шпиндель, переміщуваний роликами, що обертаються навколо його, утворюють ролико-гвинтову передачу, в якій навантаження передається через різьбову поверхню всіх роликів, що забезпечує максимальну площу контакту. Основним недоліком відомого привода є відносно великий момент інерції обертової частини привода. З фізики відомо, що момент інерції механічної системи відносно нерухомої осі дорівнює сумі добутків мас всіх матеріальних точок системи на квадрати їхніх відстаней до осі. У відомому приводі відносно великий момент інерції обертової частини обумовлений безпосереднім зв'язком ротора з різьбовою втулкою, що приводить до необхідності використання стакана, який з'єднує ротор з різьбовою втулкою, і до необхідності вибору товщини стінок ротора й різьбової втулки з урахуванням їхнього з'єднання зі стаканом (наприклад шліцьового та/або шпонкового), які перевищують товщини, обумовлені їхнім функціональним призначенням (наприклад міцністю, магнітним насиченням тощо). Іншими словами, безпосередній кінематичний зв'язок ротора з різьбовою втулкою призводить до необхідності введення конструктивного зв'язку, реалізованого через додаткову масу, розміщену між ротором і різьбовою втулкою. Таким чином, великий момент інерції обертової частини у відомому приводі не дозволяє забезпечити необхідну швидкість відпрацьовування положення виконавчого органа електромеханічного привода без великих енергетичних витрат. Крім того, конструкція відомого привода не відповідає вимогам резервування, які пред'являють до системи керування турбоагрегату атомної електростанції для забезпечення необхідної надійності й безпеки роботи. Також у відомому приводі відсутня можливість визначення положення його виконавчого органа (гвинтового шпинделя). Задачею корисної моделі, що заявляється, є усунення зазначених недоліків, а особливо - забезпечення необхідної для безпеки атомної електростанції швидкості й точності відпрацьовування положення виконавчого органа привода при мінімальних енергетичних витратах у системі керування турбоагрегату. Поставлена задача вирішується використанням лінійного електромеханічного привода, що містить електродвигун, статор якого охоплює порожній ротор. Крім того, пропонований привод містить вихідний шток і ролики із зовнішньою різьбою, розміщені в порожнині ротора в різьбовій втулці по окружності так, що їхні осі є паралельними осі ротора. Від відомого електропривода пропонований привод відрізняється тим, що всередині ротора співвісно розміщений гвинт, який має зовнішню різьбу, що взаємодіє з різьбою роликів, яка також взаємодіє із внутрішньою різьбою зазначеної втулки, жорстко зв'язаної з одним кінцем вихідного штока, встановленого з утриманням від пово 66271 4 роту, причому з одним кінцем гвинта жорстко зв'язаний ротор, а інший кінець гвинта розміщений у порожнині вихідного штока. У пропонованому приводі гвинт, взаємодіючий через різьбу роликів з не обертовою різьбовою втулкою, має відносно невеликий діаметр, а ротор виконаний максимально легким, тому обертова частина привода має відносно невеликий момент інерції, що дозволяє забезпечити необхідну швидкість відпрацьовування положення виконавчого органа електромеханічного привода без великих енергетичних витрат. Утримання вихідного штока від повороту переважно забезпечується протиротаційним пристроєм, який містить коромисло, що жорстко закріплене на вихідному штоку, і колеса, два з яких встановлені на підпружинених важелях, що виходять із коромисла по суті перпендикулярно поздовжній осі вихідного штока. Ротор пропонованого електромеханічного привода переважно встановлений у підшипниковому вузлі з можливістю попереднього натягу для усунення осьових люфтів. Взаємодія зовнішньої різьби гвинта із внутрішньою різьбою втулки, яка здійснюється через зовнішню різьбу роликів, переважно є безлюфтовою. У переважному варіанті реалізації корисної моделі ролики в кількості дев'яти штук розміщені в сепараторах, встановлених у різьбовій втулці, а вихідний шток має гладку поверхню. Для погашення кінетичної енергії частин, що рухаються у пропонованому електромеханічному приводі при досягненні вихідним штоком крайніх положень, його хід переважно обмежений пружними елементами, такими, як тарілчасті пружини або гумові демпфери. Ротор електродвигуна в електромеханічному приводі може обертатися як за годинниковою стрілкою, так і проти неї, викликаючи переміщення вихідного штока як в одному напрямку, наприклад, для закриття відсічного золотника, так і в протилежному напрямку, відповідно, для відкриття золотника. Для забезпечення надійності роботи електромеханічного привода на роторі його електродвигуна співвісно один за одним закріплені щонайменше два комплекти полюсних магнітів, охоплюваних відповідно щонайменше двома комплектами полюсних котушок статора, розміщених співвісно один за одним. Таким чином у пропонованому електромеханічному приводі забезпечене резервне дублювання силової електричної частини. Крім того, з метою резервного дублювання здвоєними виконані електричні роз'єми, котушка керування гальмом і датчик зворотного зв'язку. Датчик зворотного зв'язку дозволяє з необхідною точністю визначати поточне положення вихідного штока з подачею відповідного сигналу. При одержанні приводом сигналу на зміну робочого положення відсічного золотника у двигуні спрацьовує одна пара статор-ротор, при відмові якої можливе включення в роботу іншої пари статорротор. Крім того, у пропонованому електромеханічному приводі забезпечена відсутність механічних 5 люфтів, висока точність переміщення вихідного штоку, взаємодіючого з відсічним золотником, і захист вихідного штоку від забруднення. Пропонований електромеханічний привод має високі експлуатаційні якості й дозволяє при мінімальних енергетичних витратах з високою надійністю та швидкістю керувати положенням відсічного золотника турбоагрегату атомної електростанції. На фіг. 1 схематично показаний розріз пропонованого електромеханічного привода. На фіг. 2 схематично показаний розріз пропонованого електромеханічного привода, виконаний по лінії А-А на фіг. 1. На фіг. 3 схематично показана конструкція підпружинених важелів коромисла пропонованого електромеханічного привода. Зображено за видом Б на фіг. 2. Як показано на фіг. 1, електромеханічний привод містить електродвигун 1, статор 2 якого охоплює порожній ротор 3 і дев'ять роликів 4, оснащених зовнішньою різьбою і розміщених у порожнині ротора 3 у сепараторах 5 по окружності так, що їхні осі є паралельними осі ротора 3. Ротор 3 жорстко зв'язаний із гвинтом 6, співвісно закріпленим всередині нього й таким, що має зовнішню різьбу, що взаємодіє з різьбою роликів 4. Різьба роликів 4 також взаємодіє із внутрішньою різьбою втулки 7, що розміщена в порожнині ротора 3, який охоплює ролики 4 і жорстко зв'язана зі стаканом 8. Стакан 8 розміщений на кінці вихідного штока 9, з яким він виконаний переважно як одне ціле. Таким чином, втулка 7 жорстко зв'язана із внутрішнім кінцем вихідного штока. Зовнішній різьбовий кінець 10 вихідного штока 9, який є виконавчим органом електромеханічного привода, з'єднаний із запірним органом, у даному прикладі з відсічним золотником. Жорсткий зв'язок гвинта 6 з ротором 3 реалізований жорстким закріпленням одного кінця гвинта 6 у маточині 11 ротора 3, що розміщена з одного кінця ротора 3 і у свою чергу посаджена на спарені радіально-упорні підшипники підшипникового вузла 12, які забезпечують безлюфтове обертання ротора 3. Інший кінець ротора 3 посаджений на радіально-упорні підшипники підшипникового вузла 23. На роторі 3 закріплені два набори полюсних магнітів 13, розміщених співвісно один за одним і охоплюваних відповідно комплектами полюсних котушок статора, розміщених співвісно один за одним. Вихідний шток 9 утримується від повороту навколо своєї поздовжньої осі протиротаційним при 66271 6 строєм, що містить коромисло 14, яке надягнуте на вихідний шток 9, по суті, перпендикулярно йому й жорстко закріплене. На двох кінцях коромисла 14 встановлено по парі коліс 15 (фіг. 2), осі яких по суті перпендикулярні поздовжній осі вихідного штока 9. Вісь одного колеса 15 однієї зазначеної пари й вісь одного колеса 15 іншої зазначеної пари, розташованого на протилежному кінці коромисла 14 діаметрально протилежно відносно поздовжньої осі штока 9, виконані нерухомими. Інші два протилежних колеса 15 виконані підпружиненими, оскільки встановлені на підпружинених важелях 16 (фіг.3), виконаних з можливістю кутового переміщення навколо своїх осей 17, причому вісь обертання підпружиненого колеса й вісь обертання важеля рознесені на кілька міліметрів. Усунення кутового люфту коромисла 14 відбувається за рахунок вибору зазору між колесами 15 і внутрішньою поверхнею напрямних поздовжніх пазів циліндра 18 (фіг.1). Електромеханічний привод також містить гальмовий пристрій 19, що має дві керуючі котушки 20 і два датчики 21 зворотного зв'язку, закріплені на циліндричній частині гвинта 6, закриті зовні ковпаком 22. Корпус електромеханічного привода в зборі утворений ковпаком 22, гальмовим пристроєм 19, підшипниковим вузлом 12, двигуном 1, підшипниковим вузлом 23, циліндром 18 і монтажним фланцем 24, які стягнуті шпильками 25. Обмеження ходу вихідного штока 9 при досягненні ним крайніх положень здійснюється тарілчастими пружинами 26. При роботі привода обертання порожнього ротора 3 електродвигуна 1 викликає обертання гвинта 6, зовнішня різьба якого взаємодіє з різьбою охоплюючих його роликів 4 і викликає їхнє обертання навколо своїх осей. Різьба роликів 4 взаємодіє також із внутрішньою різьбою втулки 7. Обертання роликів 4 призводить до лінійного переміщення втулки 7, жорстко зв'язаної з вихідним штоком 9 через стакан 8 і приводить запірний орган у поступальний рух. Залежно від напрямку обертання ротора відбувається закривання або відкривання відсічного золотника (не показаний). Оскільки діаметр гвинта 6 відносно малий, а ротор 3 виконаний максимально легким, обертова частина привода має невеликий момент інерції й і забезпечує необхідну швидкість відпрацьовування положення виконавчого органа електромеханічного привода без великих енергетичних витрат. 7 Комп’ютерна верстка Л. Купенко 66271 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical drive
Автори англійськоюFedosovskyi Mykhailo Yevhenovych, Nikolaiev Viacheslav Viktorovych, Dunaiev Vadym Igorovych
Назва патенту російськоюЭлектромеханический привод
Автори російськоюФедосовский Михаил Евгеньевич, Николаев ВячеславВикторович, Дунаев Вадим Игоревич
МПК / Мітки
МПК: F16K 31/04
Мітки: привод, електромеханічний
Код посилання
<a href="https://ua.patents.su/4-66271-elektromekhanichnijj-privod.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний привод</a>
Електромеханічний привод регулятора міжелектродного проміжка
Номер патенту: 22898
Опубліковано: 05.05.1998
Автор: Боков Віктор Михайлович
МПК: F16H 27/00
Мітки: електромеханічний, привод, регулятора, міжелектродного, проміжка
Формула / Реферат:
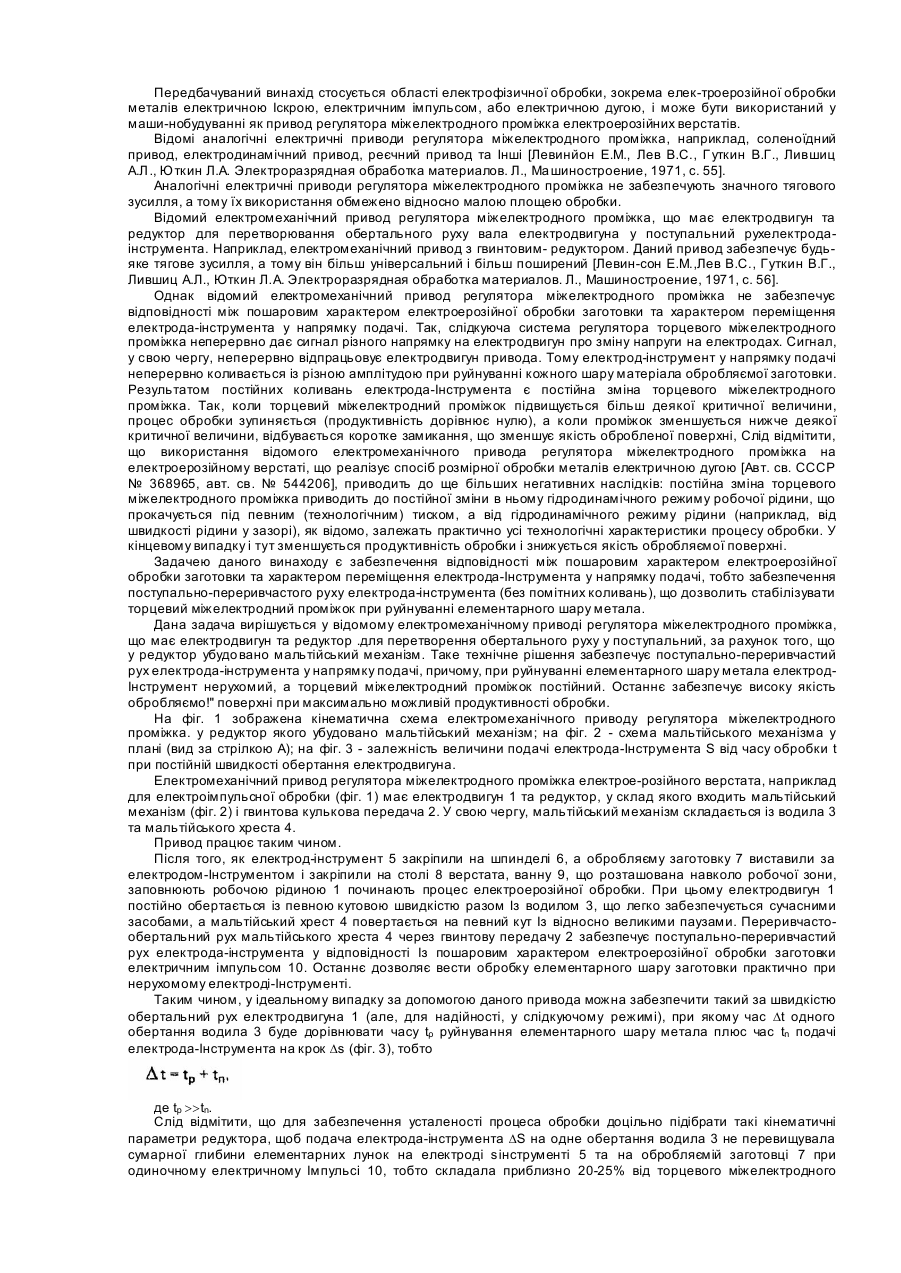
Електромеханічний привод регулятора міжелектродного проміжка, що має електродвигун та редуктор для перетворювання обертального руху у поступальний, який відрізняється тим, що у редуктор убудовано мальтійський механізм.
Електромеханічний водонагрівач з дисковими магнітопроводами
Номер патенту: 50044
Опубліковано: 25.05.2010
Автори: Юдовінский Валерій Борісович, Жарков Віктор Якович, Атрошенко Олександр Сергійович
МПК: F03D 7/06
Мітки: магнітопроводами, електромеханічний, водонагрівач, дисковими
Формула / Реферат:
Електромеханічний водонагрівач з дисковими магнітопроводами, що містить нерухомі, співвісно розташовані дискові магнітопроводи з зубчастою будовою прилеглих дзеркально розташованих торцевих поверхонь, індукційні обмотки в кільцевій канавці зубчастого торця кожного магнітопроводу, збуджені постійним струмом в одному напрямі, і дисковий ротор, розташований співвісно в зазорі між зубчастими торцями нерухомих дискових магнітопроводів в...
Багатопозиційний привод
Номер патенту: 90383
Опубліковано: 26.04.2010
Автори: Дорогань Володимир Васильович, Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 7/00
Мітки: привод, багатопозиційний
Формула / Реферат:
1. Багатопозиційний привод, який містить циліндр з вихідним штоком, передню і задню кришки, в якому послідовно розміщено поршні з обмежувачами відносного переміщення, що утворюють розрядні порожнини і порожнину зворотного руху поршнів з каналами живлення, який відрізняється тим, що поршень молодшого розряду жорстко з'єднаний з додатковим штоком, який через отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з...
Електромеханічний механізм натягу гусениць рушія бойової гусеничної машини

Номер патенту: 85666
Опубліковано: 25.02.2009
Автори: Янчик Олександр Григорович, Беліков Віктор Тріфонович, Лещенко Олег Іванович, Головань В'ячеслав Григорович, Магерамов Лютфалій Курбан-Алієвич, Дяченко Олександр Феодосьович
МПК: F41H 7/00
Мітки: машини, бойової, електромеханічний, механізм, натягу, гусениц, гусеничної, рушія
Формула / Реферат:
1. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини, який складається з одного або декількох електродвигунів обертального типу і проміжних перетворювачів механічної енергії, який відрізняється тим, що проміжні перетворювачі механічної енергії виконані у вигляді однієї або декількох гвинтових передач, безпосередньо з приводним або приводними двигунами в один або декілька автономних електромеханізмів, механічно...
Експериментальний вентильний індукторно-реактивний привод
Номер патенту: 40674
Опубліковано: 27.04.2009
Автори: Фінкельштейн Володимир Борисович, Зінченко Олена Євгенівна
МПК: H02K 29/00
Мітки: вентильний, експериментальній, привод, індукторно-реактивний
Формула / Реферат:
Експериментальний вентильний індукторно-реактивний привод, що складається з комутатора й електромеханічного перетворювача (двигуна), до складу якого входить статор з обмотками, ротор, підшипникові щити, датчики й обертові шторки, який відрізняється тим, що з метою підвищення точності й зниження трудомісткості визначення оптимальних кутів комутації в щиті фрезеруються дугоподібні канали, у які вставлені шпильки, прикручені до кільця,...
Попередній патент: Спосіб одержання газотермічного покриття
Наступний патент: Пристосування зубофрезерне
Випадковий патент: Фітокомпозиція для профілактики і лікування захворювань серцево-судинної та нервової систем і нормалізації підвищеного артеріального тиску