Захоплювач вантажу

Формула / Реферат
Захоплювач вантажу, що містить паралельно розміщені силовий і стопорний вертикальні елементи, шарнірно з'єднані між собою проміжними ланками, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий вертикальний елемент споряджено зачепом, який відрізняється тим, що стопорний вертикальний елемент також споряджено зачепом.
Текст
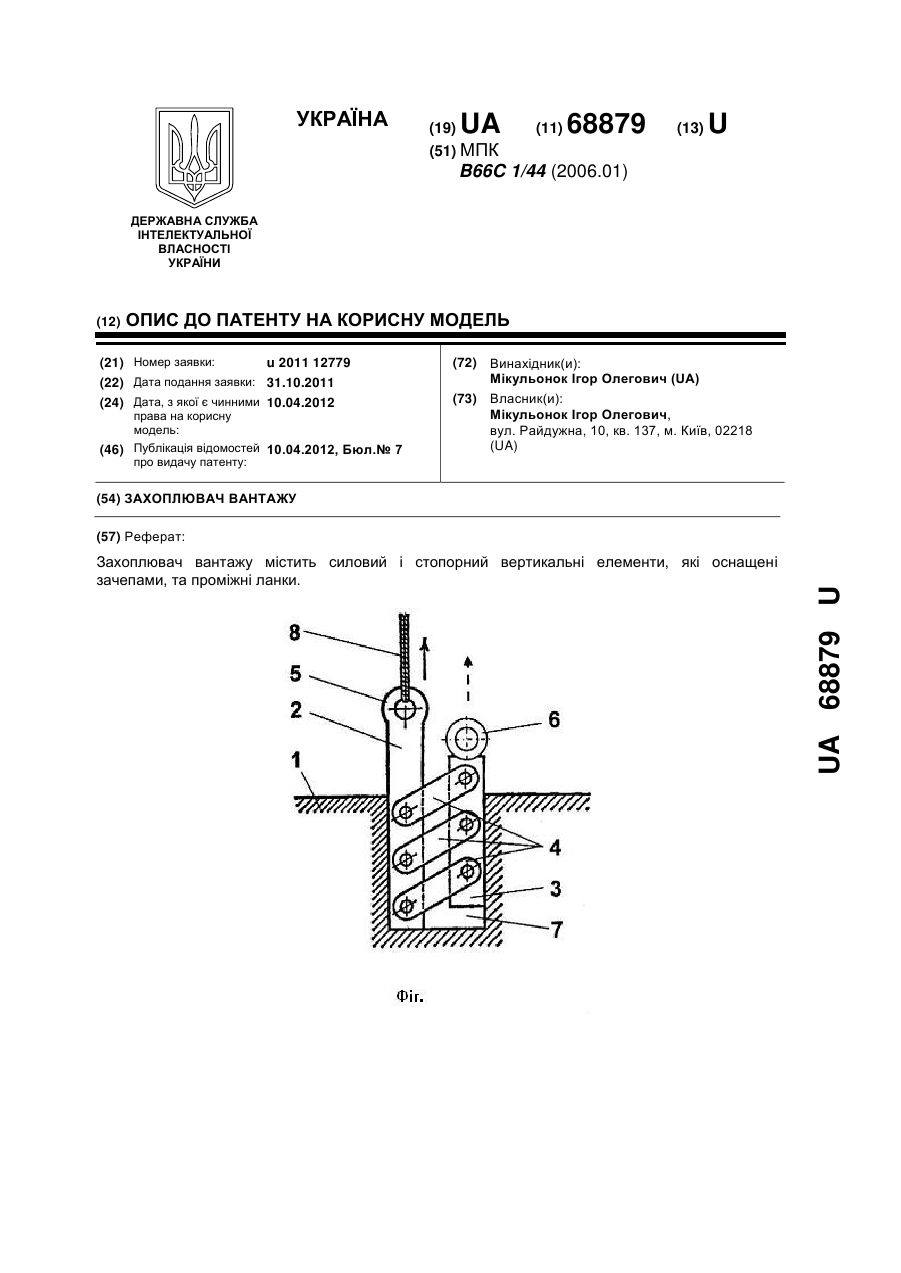
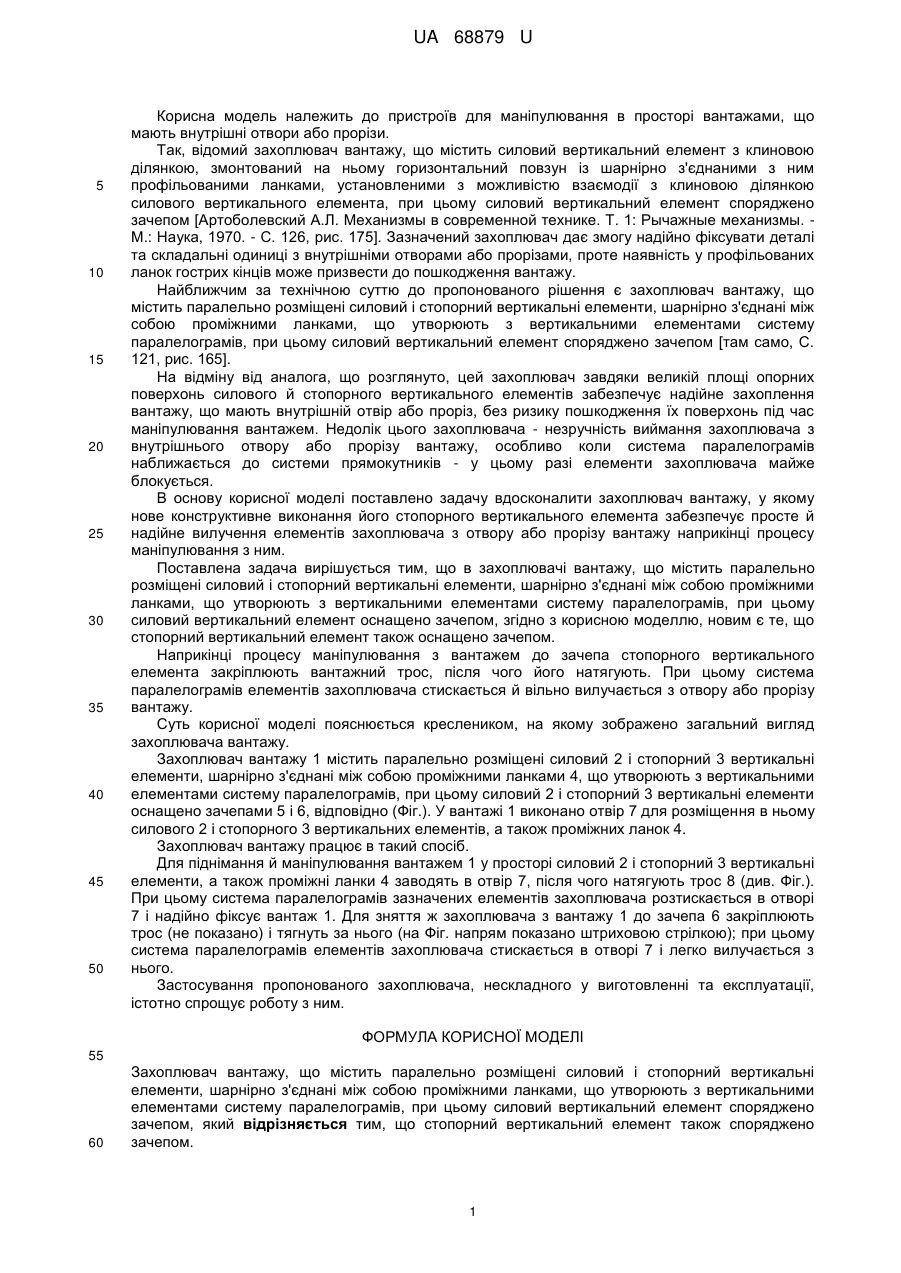
Реферат: UA 68879 U UA 68879 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до пристроїв для маніпулювання в просторі вантажами, що мають внутрішні отвори або прорізи. Так, відомий захоплювач вантажу, що містить силовий вертикальний елемент з клиновою ділянкою, змонтований на ньому горизонтальний повзун із шарнірно з'єднаними з ним профільованими ланками, установленими з можливістю взаємодії з клиновою ділянкою силового вертикального елемента, при цьому силовий вертикальний елемент споряджено зачепом [Артоболевский А.Л. Механизмы в современной технике. Т. 1: Рычажные механизмы. М.: Наука, 1970. - С. 126, рис. 175]. Зазначений захоплювач дає змогу надійно фіксувати деталі та складальні одиниці з внутрішніми отворами або прорізами, проте наявність у профільованих ланок гострих кінців може призвести до пошкодження вантажу. Найближчим за технічною суттю до пропонованого рішення є захоплювач вантажу, що містить паралельно розміщені силовий і стопорний вертикальні елементи, шарнірно з'єднані між собою проміжними ланками, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий вертикальний елемент споряджено зачепом [там само, С. 121, рис. 165]. На відміну від аналога, що розглянуто, цей захоплювач завдяки великій площі опорних поверхонь силового й стопорного вертикального елементів забезпечує надійне захоплення вантажу, що мають внутрішній отвір або проріз, без ризику пошкодження їх поверхонь під час маніпулювання вантажем. Недолік цього захоплювача - незручність виймання захоплювача з внутрішнього отвору або прорізу вантажу, особливо коли система паралелограмів наближається до системи прямокутників - у цьому разі елементи захоплювача майже блокується. В основу корисної моделі поставлено задачу вдосконалити захоплювач вантажу, у якому нове конструктивне виконання його стопорного вертикального елемента забезпечує просте й надійне вилучення елементів захоплювача з отвору або прорізу вантажу наприкінці процесу маніпулювання з ним. Поставлена задача вирішується тим, що в захоплювачі вантажу, що містить паралельно розміщені силовий і стопорний вертикальні елементи, шарнірно з'єднані між собою проміжними ланками, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий вертикальний елемент оснащено зачепом, згідно з корисною моделлю, новим є те, що стопорний вертикальний елемент також оснащено зачепом. Наприкінці процесу маніпулювання з вантажем до зачепа стопорного вертикального елемента закріплюють вантажний трос, після чого його натягують. При цьому система паралелограмів елементів захоплювача стискається й вільно вилучається з отвору або прорізу вантажу. Суть корисної моделі пояснюється креслеником, на якому зображено загальний вигляд захоплювача вантажу. Захоплювач вантажу 1 містить паралельно розміщені силовий 2 і стопорний 3 вертикальні елементи, шарнірно з'єднані між собою проміжними ланками 4, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий 2 і стопорний 3 вертикальні елементи оснащено зачепами 5 і 6, відповідно (Фіг.). У вантажі 1 виконано отвір 7 для розміщення в ньому силового 2 і стопорного 3 вертикальних елементів, а також проміжних ланок 4. Захоплювач вантажу працює в такий спосіб. Для піднімання й маніпулювання вантажем 1 у просторі силовий 2 і стопорний 3 вертикальні елементи, а також проміжні ланки 4 заводять в отвір 7, після чого натягують трос 8 (див. Фіг.). При цьому система паралелограмів зазначених елементів захоплювача розтискається в отворі 7 і надійно фіксує вантаж 1. Для зняття ж захоплювача з вантажу 1 до зачепа 6 закріплюють трос (не показано) і тягнуть за нього (на Фіг. напрям показано штриховою стрілкою); при цьому система паралелограмів елементів захоплювача стискається в отворі 7 і легко вилучається з нього. Застосування пропонованого захоплювача, нескладного у виготовленні та експлуатації, істотно спрощує роботу з ним. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Захоплювач вантажу, що містить паралельно розміщені силовий і стопорний вертикальні елементи, шарнірно з'єднані між собою проміжними ланками, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий вертикальний елемент споряджено зачепом, який відрізняється тим, що стопорний вертикальний елемент також споряджено зачепом. 1 UA 68879 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюLoad gripping device
Автори англійськоюMikulionok Ihor Olehovych
Назва патенту російськоюЗахват груза
Автори російськоюМикуленок Игорь Олегович
МПК / Мітки
МПК: B66C 1/44
Мітки: вантажу, захоплювач
Код посилання
<a href="https://ua.patents.su/4-68879-zakhoplyuvach-vantazhu.html" target="_blank" rel="follow" title="База патентів України">Захоплювач вантажу</a>
Захоплювач кліщовий для слябів

Номер патенту: 56070
Опубліковано: 27.12.2010
Автори: Кашанський Дмитро Анатолійович, Ісаков Микола Іванович, Железняк Віктор Вікторович, Ісакова Анна Миколаївна
МПК: B66C 1/00
Мітки: слябів, кліщовий, захоплювач
Формула / Реферат:
Захоплювач кліщовий для слябів, що містить траверсу, на кінцях якої закріплені кліщі, кожні з яких містять дві кліщовини, виконані у вигляді двоплечих важелів, шарнірно прикріплених до корпусу, при цьому один кінець кожного з важелів з'єднаний з губкою, а другий - шарнірно з'єднаний з тягою, другий кінець якої прикріплений до траверси, причому губка шарнірно з'єднана з корпусом за допомогою шатуна, який відрізняється тим, що оснащений двома...
Вантажопідйомний захоплювач
Номер патенту: 21323
Опубліковано: 15.03.2007
Автори: Шканов Олег Юхимович, Шабалдак Микола Васильович
МПК: B66C 1/22
Мітки: вантажопідйомний, захоплювач
Формула / Реферат:
1. Вантажопідйомний захоплювач, виконаний у вигляді скоби, яка навішена за допомогою стропа на крюк вантажопідйомного механізму і шарнірно зв'язаного зі скобою фіксатора, обладнаного замикаючим виступом, що жорстко скріплений з ним під деяким кутом, який відрізняється тим, що вантажопідйомний захоплювач обладнано сережкою, з одного боку шарнірно зв'язаною зі скобою, а з іншого боку зі стропом і фіксатором, виконаним у вигляді двох паралельно...
Балансирний захоплювач
Номер патенту: 38754
Опубліковано: 12.01.2009
Автори: Рашківський Володимир Павлович, Тонкачеєв Геннадій Миколайович
МПК: B66C 1/22
Мітки: захоплювач, балансирний
Формула / Реферат:
1. Балансирний захоплювач, що містить траверсу з блоками та зв'язаними через канатно-блочну систему верхньою та нижньою рамками зі штирями і механізмом керування ними, який відрізняється тим, що рамки виконані з двома штирями, направленими один до одного, з довжиною висування відносно рамки не більше половини довжини монтажного отвору колони.2. Балансирний захоплювач за п. 1, який відрізняється тим, що канати з'єднані з рамками...
Автоматичний магнітний захоплювач
Номер патенту: 65032
Опубліковано: 25.11.2011
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
МПК: B66C 1/04
Мітки: захоплювач, магнітний, автоматичний
Формула / Реферат:
Автоматичний магнітний захоплювач, який містить повзун чотиритактного механізму фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а...
Струминний захоплювач

Номер патенту: 32348
Опубліковано: 15.12.2000
Автори: Проць Ярослав Іванович, Лобур Тарас Богданович, Козбур Ігор Романович, Савків Володимир Богданович
МПК: B25J 15/06
Мітки: захоплювач, струминний
Текст:
...позиціювання і вантажопідйомність захоплювача-присоса, шляхом виконання взаємодіючої з об'єктом поверхні корпуса циліндричноїформи, а його порожнину перекриває секторна вставка, утворюєм замкнуту просторову щілину, що з'єднує порожнину корпуса з атмосферою, що дозволить розширити технологічні властивості струменевогого захоплювача і підвищить його коефіцієнт корисної дії. Суть винаходу пояснюють графічні матеріали на яких зображено: фіг. 1 -...
Попередній патент: Спосіб прогнозування тяжкості перебігу травматичної хвороби
Наступний патент: Барабанний апарат
Випадковий патент: Лебідка шахтна для похилих виробок