Крокуючий транспортний пристрій


Формула / Реферат
1. Крокуючий транспортний пристрій, що містить корпус, дві опори і механізм повороту, який відрізняється тим, що опори розташовані відповідно праворуч та ліворуч від корпусу і з'єднані з встановленими у передній частині корпусу циліндричними шарнірами, поздовжні осі яких лежать на одній горизонтальній прямій лінії, а механізм повороту виконаний у вигляді двох з'єднаних з корпусом опорних майданчиків, що розташовані відповідно вище та нижче корпусу і мають можливість обертатися навколо його вертикальної осі.
2. Пристрій за п. 1, який відрізняється тим, що в корпусі встановлений реверсивний двигун, який з'єднаний з циліндричними шарнірами кожної з двох опор керованою муфтою і редуктором, що самогальмується.
3. Пристрій за п. 2, який відрізняється тим, що опорні майданчики з'єднані між coбoю валом, зв'язаним з реверсивним двигуном керованою муфтою і редуктором.
Текст
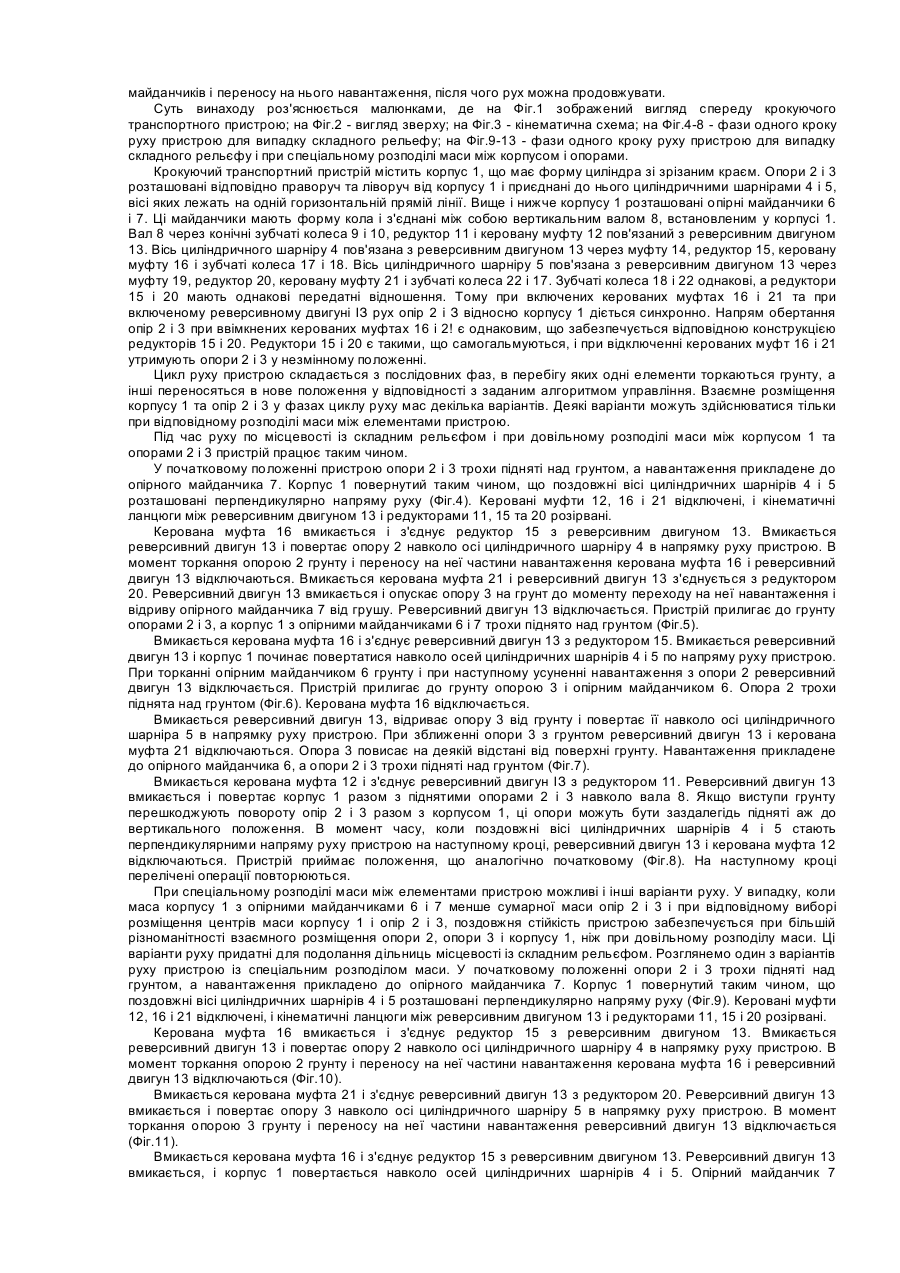
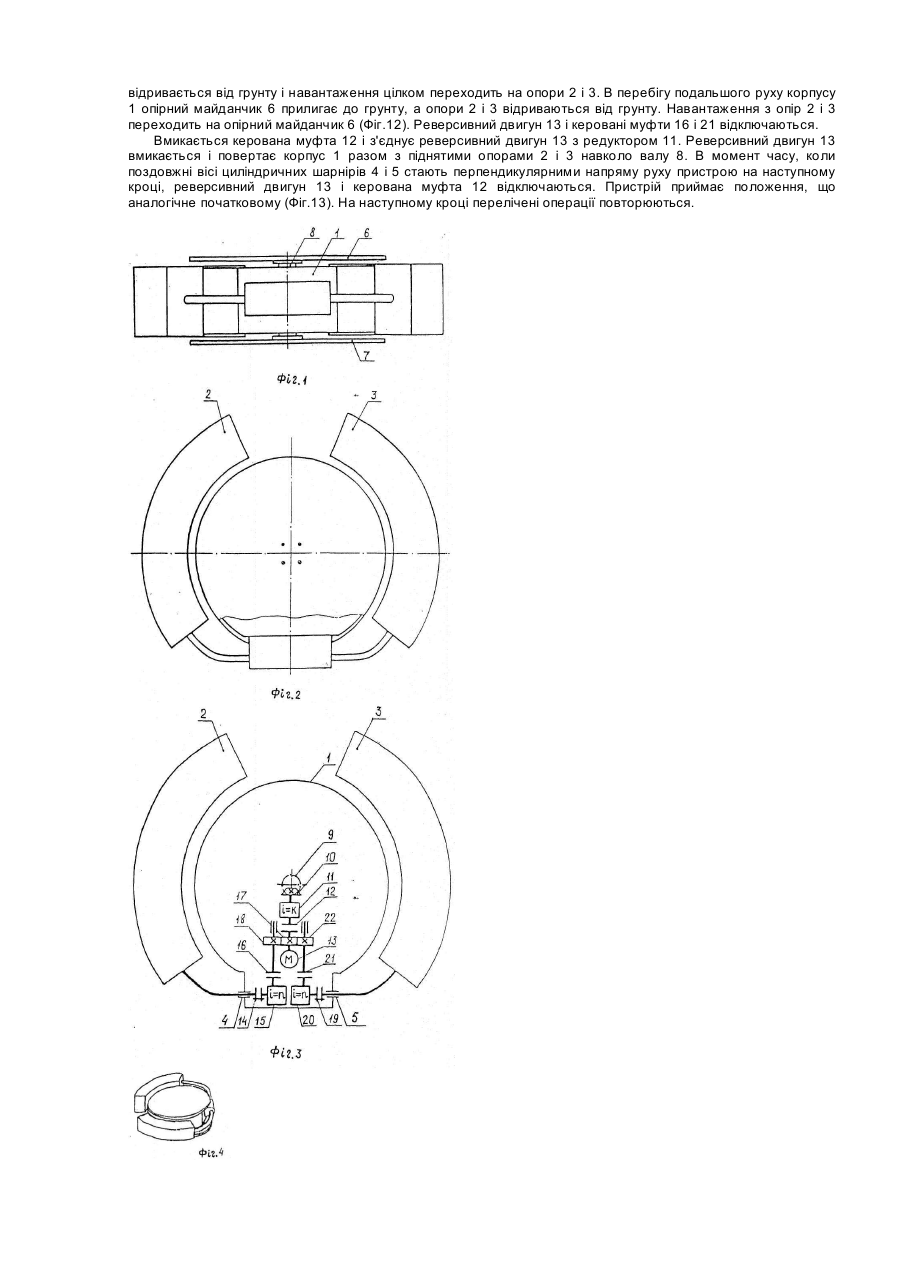
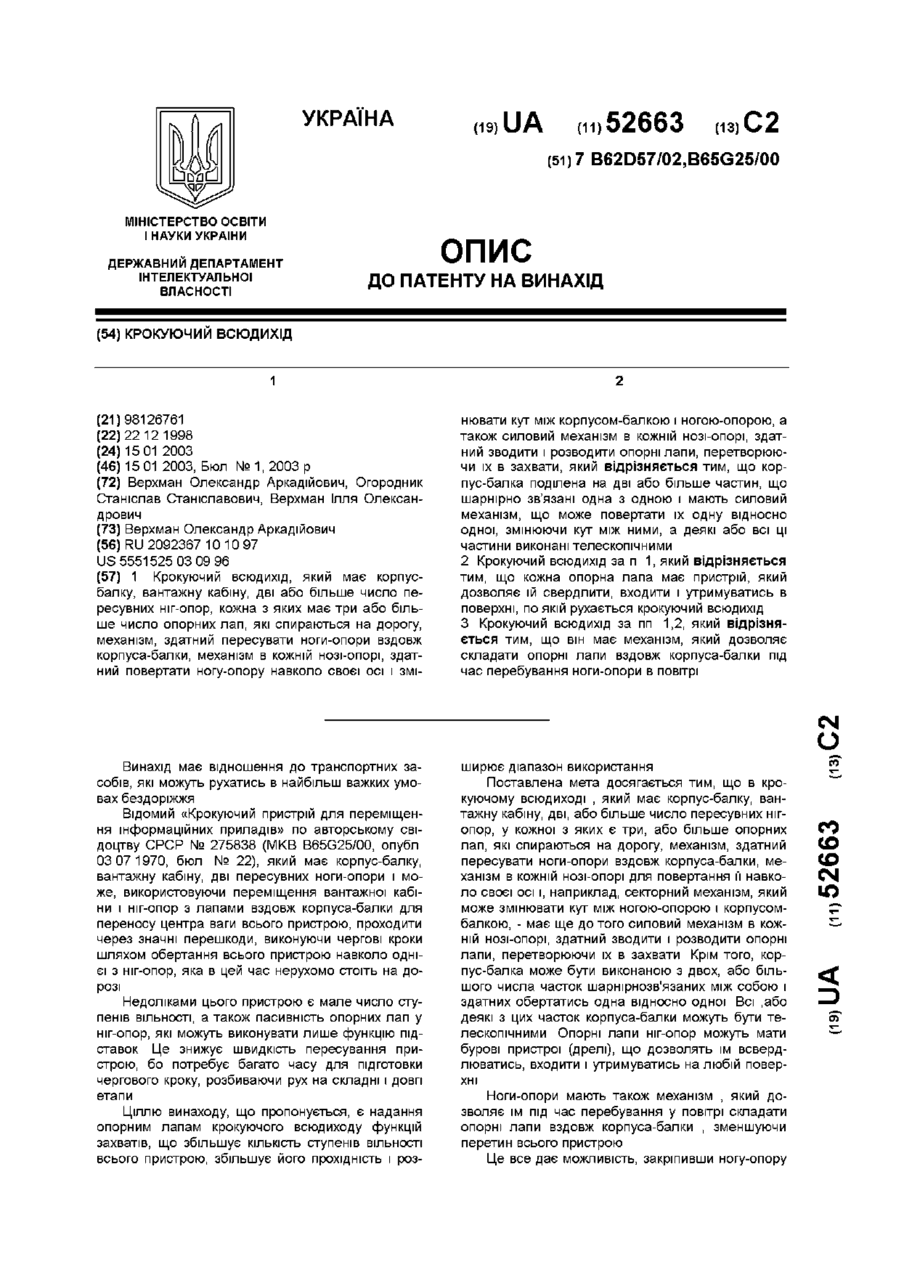
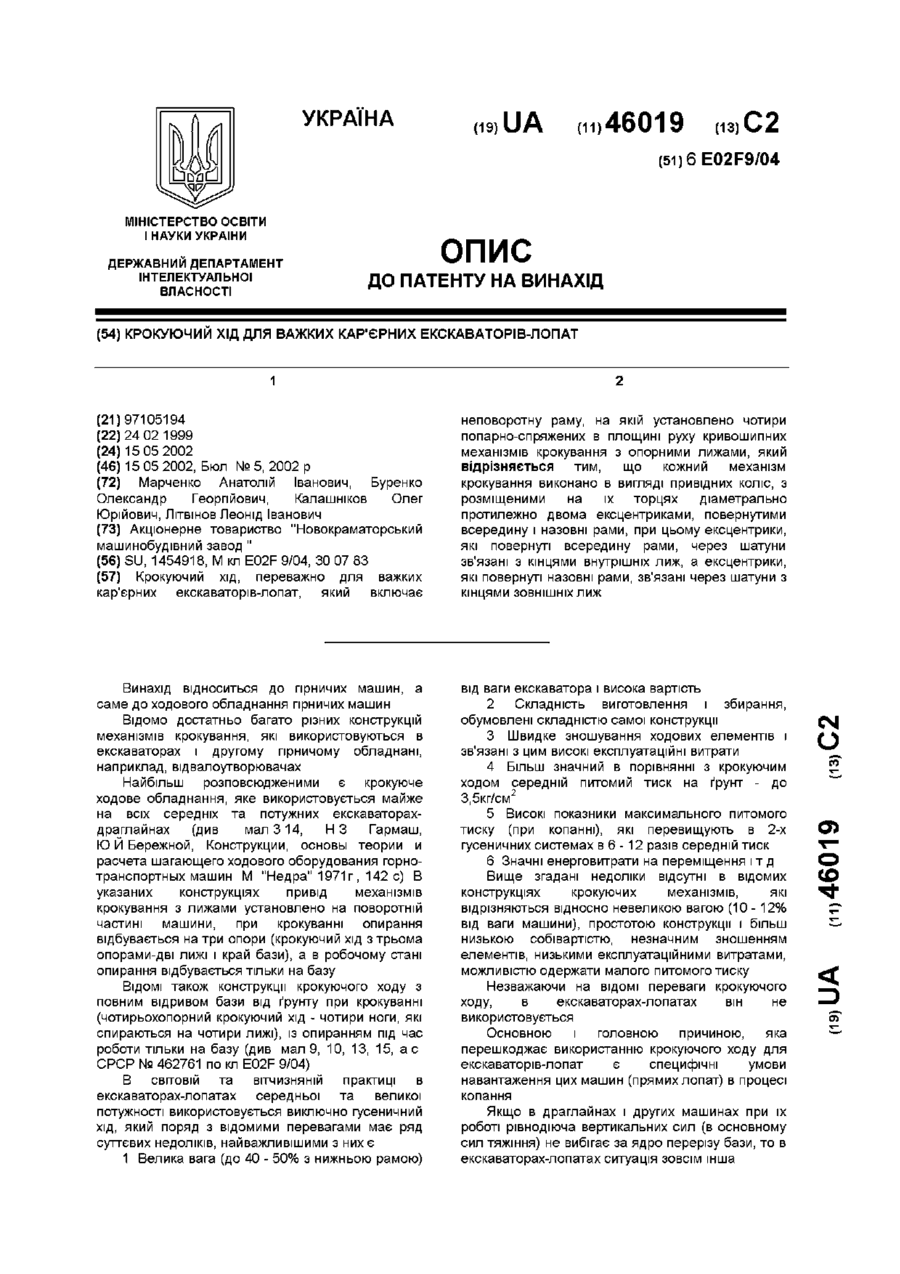
Винахід відноситься до галузі транспорту і призначений для використання в умовах складного рельєфу місцевості, у зонах руйнувань та аварій. Відомим є крокуючий транспортний пристрій, що містить пустотілу штангу з механізмом повороту її навколо осі, на якій закріплені триногі опори у вигляді еластичних вакуумних присосок, і механізм підйому і повороту штанги разом з однією з опір, обладнаний гідроциліндром подвійної дії та гвинтовою парою, притиснутою пружиною (Авторське свідоцтво СРСР №516567, МПК B62D57/00, опубл. 05.06.76, Бюл. №21). Пристрій може переміщатися по похилим, вертикальним та горизонтальним поверхням, однак ці поверхні повинні бути достатньо гладкими та щільними, щоб еластичні вакуумні присоски могли на них заримуватися. Рух пристрою по нерівним і пухким грунтам неможливий. Найбільш близьким аналогом пристрою, що заявляється, обраним за прототип, є крокуючий транспортний пристрій, що містить корпус з опорами змінної довжини, горизонтальну штангу з двома закріпленими на її кінцях опорами змінної довжини, гідроприводи переміщування штанги відносно корпусу в горизонтальній та в вертикальній площинах і гідравлічний механізм повороту штанги відносно корпусу (Авторське свідоцтво СРСР №734055, МПК B62D57/02, опубл. 15.05.80, Бюл. №18). Пристрій, що заявляється, також як і прототип, містить корпус, опори і механізм повороту. Пристрій-прототип пересувається за рахунок поздовжнього·переміщування штанги відносно корпусу при почерговому контакті з грунтом опір корпусу і опір штанги. Перенесення навантаження з опір корпусу на опори штанги і навпаки здійснюється шляхом зміни довжини опір і шляхом переміщування штанги уздовж вертикальної осі корпусу. Вибір напряму руху пристрою виконується за рахунок повороту піднятої над грунтом штанги навколо вертикальної осі корпусу за допомогою гідравлічного механізму повороту. Особливість руху полягає в тому, що кожний крок є результатом декількох прямолінійних переміщувань елементів пристрою в горизонтальної та в вертикальної площинах. Опори штанги паралельні вертикальній осі корпусу і встановлюються на грунт під тим же кутом, що і корпус. Після перенесення навантаження з опір корпусу на опори штанги і у перебігу наступного переміщування піднятого корпуса уздовж штанги точки контакту пристою з виступами грунту можуть стрибкоподібно змінюватися. Під дією сили тяжіння, реакцій грунту, що прикладені до опір, та інерційних сил можуть з'явитися обертальні моменти, що здібні перекинути пристрій на бік або опорами догори. Внаслідок цього подальший рух стає неможливим. Таким чином, відомий пристрій має малі поздовжню та поперечну стійкість у фазі переносу корпусу, що ускладнює подолання, перешкод, розміри яких порівняні з його власними розмірами. В основу винаходу поставлено задачу удосконалення крокуючого транспортного пристрою, в якому шляхом нового конструктивного виконання з'єднання опір з корпусом та механізму повороту забезпечити підвищення його поздовжньої та поперечної стійкості. Поставлена задача вирішується тим, що в крокуючому транспортному пристрої, що містить корпус, дві опори і механізм повороту, згідно з винаходом, опори розташовані праворуч і ліворуч корпусу і з'єднані з встановленими у передній частині корпусу циліндричними шарнірами, поздовжні вісі яких лежать на одній горизонтальній прямій лінії, а механізм повороту виконаний у вигляді двох з'єднаних з корпусом опірних майданчиків, що розташовані відповідно вище і нижче корпусу і мають можливість обертатися навколо його вертикальної осі. Крім того, у корпусі встановлений реверсивний двигун, що з'єднаний з циліндричними шарнірами кожної з двох опір керованою муфтою і редуктором, що самогальмується. Крім того, опірні майданчики механізму повороту з'єднані між собою валом, що зв'язаний з реверсивним двигуном керованою муфтою і редуктором. Відмінні ознаки, що визначаються розміщенням опір праворуч і ліворуч від корпусу та їх з'єднанням з встановленими у передній частині корпусу циліндричними шарнірами, поздовжні вісі яких розташовані на одній горизонтальній прямій лінії, а також виконанням механізму повороту у вигляді двох з'єднаних з корпусом опірних майданчиків, що розташовані відповідно вище і нижче корпусу і мають можливість обертатися навколо його вертикальної осі, є достатніми в усіх випадках, на які поширюється обсяг правової охорони, що запитується. Відмінні ознаки, що визначають установку в корпусі реверсивного двигуна, який з'єднаний з циліндричними шарнірами кожної з опір керованою муфтою і редуктором, що самогальмується, а також з'єднання опірних майданчиків між собою валом, пов'язаним з реверсивним двигуном керованою муфтою і редуктором, характеризують конкретну форму виконання приводів пристрою. На відміну від прототипу, у якому опори несучої штанги паралельні вертикальній осі корпусу і опускаються на грунт під однаковим кутом до горизонту, запропонований пристрій забезпечує почергове ставлення на грунт кожної опори шляхом повороту її навколо осі циліндричного шарніру, встановленого у передній частині корпусу. Поворот опори триває до моменту переносу на неї навантаження. За рахунок наявності обертальних ступенів свободи відносно корпусу опори більш точно відстежують зміни нахилу грунту у напрямі руху, ніж у прототипу. Розташування опір праворуч і ліворуч від корпусу дозволяє у деякій мірі відстежувати зміну нахилу у поперечному напрямі. Внаслідок підвищується поздовжня та поперечна стійкість пристрою. Обертальний характер відносного руху опір і корпусу призводить до необхідності перевороту корпусу навколо осей циліндричних шарнірів опір на кожному кроці руху. Щоб здійснити переворот корпусу навколо осей двох циліндричних шарнірів без ковзання опір по грунту, необхідним є розташування цих опір на одній прямій лінії. Для вибору напряму руху пристрою на кожному кроці необхідно здійснити поворот корпусу навколо його вертикальної осі разом з піднятими опорами. Оскільки кожний цикл руху супроводжується переворотом корпусу, вибір напряму виконується за допомогою двох опірних майданчиків, що розташовані відповідно вище та нижче корпусу і мають можливість обертатися навколо його вертикальної осі. Технічний результат, що досягається винаходом, не обмежений тільки підвищенням поздовжньої та поперечної стійкості. При аварійному перевернені на бік пристрій не втрачає можливості продовжувати рух. За рахунок переміщення опір відносно корпусу можна досягти перекочування пристрою на один з опірних майданчиків і переносу на нього навантаження, після чого рух можна продовжувати. Суть винаходу роз'яснюється малюнками, де на Фіг.1 зображений вигляд спереду крокуючого транспортного пристрою; на Фіг.2 - вигляд зверху; на Фіг.3 - кінематична схема; на Фіг.4-8 - фази одного кроку руху пристрою для випадку складного рельефу; на Фіг.9-13 - фази одного кроку руху пристрою для випадку складного рельєфу і при спеціальному розподілі маси між корпусом і опорами. Крокуючий транспортний пристрій містить корпус 1, що має форму циліндра зі зрізаним краєм. Опори 2 і 3 розташовані відповідно праворуч та ліворуч від корпусу 1 і приєднані до нього циліндричними шарнірами 4 і 5, вісі яких лежать на одній горизонтальній прямій лінії. Вище і нижче корпусу 1 розташовані опірні майданчики 6 і 7. Ці майданчики мають форму кола і з'єднані між собою вертикальним валом 8, встановленим у корпусі 1. Вал 8 через конічні зубчаті колеса 9 і 10, редуктор 11 і керовану муфту 12 пов'язаний з реверсивним двигуном 13. Вісь циліндричного шарніру 4 пов'язана з реверсивним двигуном 13 через муфту 14, редуктор 15, керовану муфту 16 і зубчаті колеса 17 і 18. Вісь циліндричного шарніру 5 пов'язана з реверсивним двигуном 13 через муфту 19, редуктор 20, керовану муфту 21 і зубчаті колеса 22 і 17. Зубчаті колеса 18 і 22 однакові, а редуктори 15 і 20 мають однакові передатні відношення. Тому при включених керованих муфтах 16 і 21 та при включеному реверсивному двигуні ІЗ рух опір 2 і З відносно корпусу 1 діється синхронно. Напрям обертання опір 2 і 3 при ввімкнених керованих муфтах 16 і 2! є однаковим, що забезпечується відповідною конструкцією редукторів 15 і 20. Редуктори 15 і 20 є такими, що самогальмуються, і при відключенні керованих муфт 16 і 21 утримують опори 2 і 3 у незмінному положенні. Цикл руху пристрою складається з послідовних фаз, в перебігу яких одні елементи торкаються грунту, а інші переносяться в нове положення у відповідності з заданим алгоритмом управління. Взаємне розміщення корпусу 1 та опір 2 і 3 у фазах циклу руху мас декілька варіантів. Деякі варіанти можуть здійснюватися тільки при відповідному розподілі маси між елементами пристрою. Під час руху по місцевості із складним рельєфом і при довільному розподілі маси між корпусом 1 та опорами 2 і 3 пристрій працює таким чином. У початковому положенні пристрою опори 2 і 3 трохи підняті над грунтом, а навантаження прикладене до опірного майданчика 7. Корпус 1 повернутий таким чином, що поздовжні вісі циліндричних шарнірів 4 і 5 розташовані перпендикулярно напряму руху (Фіг.4). Керовані муфти 12, 16 і 21 відключені, і кінематичні ланцюги між реверсивним двигуном 13 і редукторами 11, 15 та 20 розірвані. Керована муфта 16 вмикається і з'єднує редуктор 15 з реверсивним двигуном 13. Вмикається реверсивний двигун 13 і повертає опору 2 навколо осі циліндричного шарніру 4 в напрямку руху пристрою. В момент торкання опорою 2 грунту і переносу на неї частини навантаження керована муфта 16 і реверсивний двигун 13 відключаються. Вмикається керована муфта 21 і реверсивний двигун 13 з'єднується з редуктором 20. Реверсивний двигун 13 вмикається і опускає опору 3 на грунт до моменту переходу на неї навантаження і відриву опірного майданчика 7 від грушу. Реверсивний двигун 13 відключається. Пристрій прилигає до грунту опорами 2 і 3, а корпус 1 з опірними майданчиками 6 і 7 трохи піднято над грунтом (Фіг.5). Вмикається керована муфта 16 і з'єднує реверсивний двигун 13 з редуктором 15. Вмикається реверсивний двигун 13 і корпус 1 починає повертатися навколо осей циліндричних шарнірів 4 і 5 по напряму руху пристрою. При торканні опірним майданчиком 6 грунту і при наступному усуненні навантаження з опори 2 реверсивний двигун 13 відключається. Пристрій прилигає до грунту опорою 3 і опірним майданчиком 6. Опора 2 трохи піднята над грунтом (Фіг.6). Керована муфта 16 відключається. Вмикається реверсивний двигун 13, відриває опору 3 від грунту і повертає її навколо осі циліндричного шарніра 5 в напрямку руху пристрою. При зближенні опори 3 з грунтом реверсивний двигун 13 і керована муфта 21 відключаються. Опора 3 повисає на деякій відстані від поверхні грунту. Навантаження прикладене до опірного майданчика 6, а опори 2 і 3 трохи підняті над грунтом (Фіг.7). Вмикається керована муфта 12 і з'єднує реверсивний двигун ІЗ з редуктором 11. Реверсивний двигун 13 вмикається і повертає корпус 1 разом з піднятими опорами 2 і 3 навколо вала 8. Якщо виступи грунту перешкоджують повороту опір 2 і 3 разом з корпусом 1, ці опори можуть бути заздалегідь підняті аж до вертикального положення. В момент часу, коли поздовжні вісі циліндричних шарнірів 4 і 5 стають перпендикулярними напряму руху пристрою на наступному кроці, реверсивний двигун 13 і керована муфта 12 відключаються. Пристрій приймає положення, що аналогічно початковому (Фіг.8). На наступному кроці перелічені операції повторюються. При спеціальному розподілі маси між елементами пристрою можливі і інші варіанти руху. У випадку, коли маса корпусу 1 з опірними майданчиками 6 і 7 менше сумарної маси опір 2 і 3 і при відповідному виборі розміщення центрів маси корпусу 1 і опір 2 і 3, поздовжня стійкість пристрою забезпечується при більшій різноманітності взаємного розміщення опори 2, опори 3 і корпусу 1, ніж при довільному розподілу маси. Ці варіанти руху придатні для подолання дільниць місцевості із складним рельєфом. Розглянемо один з варіантів руху пристрою із спеціальним розподілом маси. У початковому положенні опори 2 і 3 трохи підняті над грунтом, а навантаження прикладено до опірного майданчика 7. Корпус 1 повернутий таким чином, що поздовжні вісі циліндричних шарнірів 4 і 5 розташовані перпендикулярно напряму руху (Фіг.9). Керовані муфти 12, 16 і 21 відключені, і кінематичні ланцюги між реверсивним двигуном 13 і редукторами 11, 15 і 20 розірвані. Керована муфта 16 вмикається і з'єднує редуктор 15 з реверсивним двигуном 13. Вмикається реверсивний двигун 13 і повертає опору 2 навколо осі циліндричного шарніру 4 в напрямку руху пристрою. В момент торкання опорою 2 грунту і переносу на неї частини навантаження керована муфта 16 і реверсивний двигун 13 відключаються (Фіг.10). Вмикається керована муфта 21 і з'єднує реверсивний двигун 13 з редуктором 20. Реверсивний двигун 13 вмикається і повертає опору 3 навколо осі циліндричного шарніру 5 в напрямку руху пристрою. В момент торкання опорою 3 грунту і переносу на неї частини навантаження реверсивний двигун 13 відключається (Фіг.11). Вмикається керована муфта 16 і з'єднує редуктор 15 з реверсивним двигуном 13. Реверсивний двигун 13 вмикається, і корпус 1 повертається навколо осей циліндричних шарнірів 4 і 5. Опірний майданчик 7 відривається від грунту і навантаження цілком переходить на опори 2 і 3. В перебігу подальшого руху корпусу 1 опірний майданчик 6 прилигає до грунту, а опори 2 і 3 відриваються від грунту. Навантаження з опір 2 і 3 переходить на опірний майданчик 6 (Фіг.12). Реверсивний двигун 13 і керовані муфти 16 і 21 відключаються. Вмикається керована муфта 12 і з'єднує реверсивний двигун 13 з редуктором 11. Реверсивний двигун 13 вмикається і повертає корпус 1 разом з піднятими опорами 2 і 3 навколо валу 8. В момент часу, коли поздовжні вісі циліндричних шарнірів 4 і 5 стають перпендикулярними напряму руху пристрою на наступному кроці, реверсивний двигун 13 і керована муфта 12 відключаються. Пристрій приймає положення, що аналогічне початковому (Фіг.13). На наступному кроці перелічені операції повторюються.
ДивитисяДодаткова інформація
Назва патенту англійськоюLegged transport apparatus
Автори англійськоюHryhoriev Serhii Vasyliovych
Назва патенту російськоюШагающее транспортное устройство
Автори російськоюГригорьев Сергей Васильевич
МПК / Мітки
МПК: B62D 57/00
Мітки: пристрій, крокуючий, транспортний
Код посилання
<a href="https://ua.patents.su/4-72178-krokuyuchijj-transportnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Крокуючий транспортний пристрій</a>
Крокуючий всюдихід
Номер патенту: 52663
Опубліковано: 15.01.2003
Автори: Верхман Ілля Олександрович, Огородник Станіслав Станіславович, Верхман Олександр Аркадійович
МПК: B65G 25/00, B62D 57/00
Формула / Реферат:
1. Крокуючий всюдихід, який має корпус-балку, вантажну кабіну, дві або більше число пересувних ніг-опор, кожна з яких має три або більше число опорних лап, які спираються на дорогу, механізм, здатний пересувати ноги-опори вздовж корпуса-балки, механізм в кожній нозі-опорі, здатний повертати ногу-опору навколо своєї осі і змінювати кут між корпусом-балкою і ногою-опорою, а також силовий механізм в кожній нозі-опорі, здатний зводити і розводити...
Крокуючий хід для важких кар’єрних екскаваторів-лопат
Номер патенту: 46019
Опубліковано: 15.05.2002
Автори: Буренко Олександр Георгійович, Марченко Анатолій Іванович, Літвінов Леонід Іванович, Калашніков Олег Юрійович
МПК: E02F 9/02
Мітки: екскаваторів-лопат, важких, хід, крокуючий, кар'єрних
Формула / Реферат:
Крокуючий хід, переважно для важких кар'єрних екскаваторів-лопат, який включає неповоротну раму, на якій установлено чотири попарно-спряжених в площині руху кривошипних механізмів крокування з опорними лижами, який відрізняється тим, що кожний механізм крокування виконано в вигляді привідних коліс, з розміщеними на їх торцях діаметрально протилежно двома ексцентриками, повернутими всередину і назовні рами, при цьому ексцентрики, які повернуті...
Транспортний холодильний пристрій

Номер патенту: 47756
Опубліковано: 15.07.2002
Автори: Василів Олег Богданович, Захаров Микола Дмитрович, Тітлов Олександр Сергійович
МПК: F25B 19/00
Мітки: пристрій, холодильний, транспортний
Формула / Реферат:
Транспортний холодильний пристрій, що включає повітропровід з випарником, який відрізняється тим, що транспортний холодильний пристрій додатково містить повітряний компресор та ежектор, при цьому робоче сопло ежектора зв'язане з нагнітальною магістраллю компресора, а випарник зв'язаний з камерою змішування ежектора, причому вихідне сопло ежектора і всмоктувальна магістраль компресора зв'язані з навколишнім середовищем, а випарник має отвір з...
Транспортний пристрій

Номер патенту: 59858
Опубліковано: 15.09.2003
Автори: Галенко Василь Петрович, Рябець Микола Пантелеймонович, Шамонін Олександр Миколайович, Пирогов Олександр Дмитрович
Мітки: транспортний, пристрій
Формула / Реферат:
Транспортний пристрій, що містить траверсу у вигляді рами з сергами і стропи, який відрізняється тим, що пристрій додатково оснащений піддоном, форма якого подібна до геометричної форми траверси, з'вязаним принаймні трьома стропами з траверсою, при цьому кінці строп закріплені на траверсі і піддоні за допомогою пальців, що мають в середній частині кільцеву канавку, крім того, на траверсі установлений пристрій натягнення строп, а на піддоні...
Газотурбінний транспортний засіб

Номер патенту: 47960
Опубліковано: 15.07.2002
Автори: Пабат Анатолій Іванович, Пабат Анастасія Анатоліївна
МПК: B60K 17/00
Мітки: транспортний, засіб, газотурбінний
Формула / Реферат:
Газотурбінний транспортний засіб, що містить ходову частину з диференціалом, газову турбіну з допоміжними агрегатами та механізм приводу від газової турбіни, який відрізняється тим, що механізм приводу містить реверсивний мультиплікатор, керовану муфту та керований варіатор, органи керування яким підключені сервоприводом до акселератора, який з'єднаний з системою керування режимом руху транспортного засобу, що з’єднана з керованою муфтою,...
Попередній патент: Пристрій для багаторазового запису та зчитування інформації
Наступний патент: Інгібітори цистеїнпротеази, спосіб їх одержання (варіанти) та фармацевтична композиція
Випадковий патент: Пиловловлювач