Планетарний привід обертального руху вальцювальної (обкатної) машини
Номер патенту: 7448
Опубліковано: 15.06.2005
Автори: Подлєсний Сергій Володимирович, Федорченко Володимир Григорович, Кривунь Валентина Степанівна
Формула / Реферат
Планетарний привід обертального руху вальцювальної (обкатної) машини, що містить електродвигун і редуктор з двома парами циліндричних зубчатих коліс, який відрізняється тим, що складається з електричного, пневматичного або гідравлічного двигунів, а також ступінчастого планетарного редуктора з внутрішнім зачепленням зубчатих коліс з різницею кількості зубців в зубчатих парах від 1 до 3.
Текст
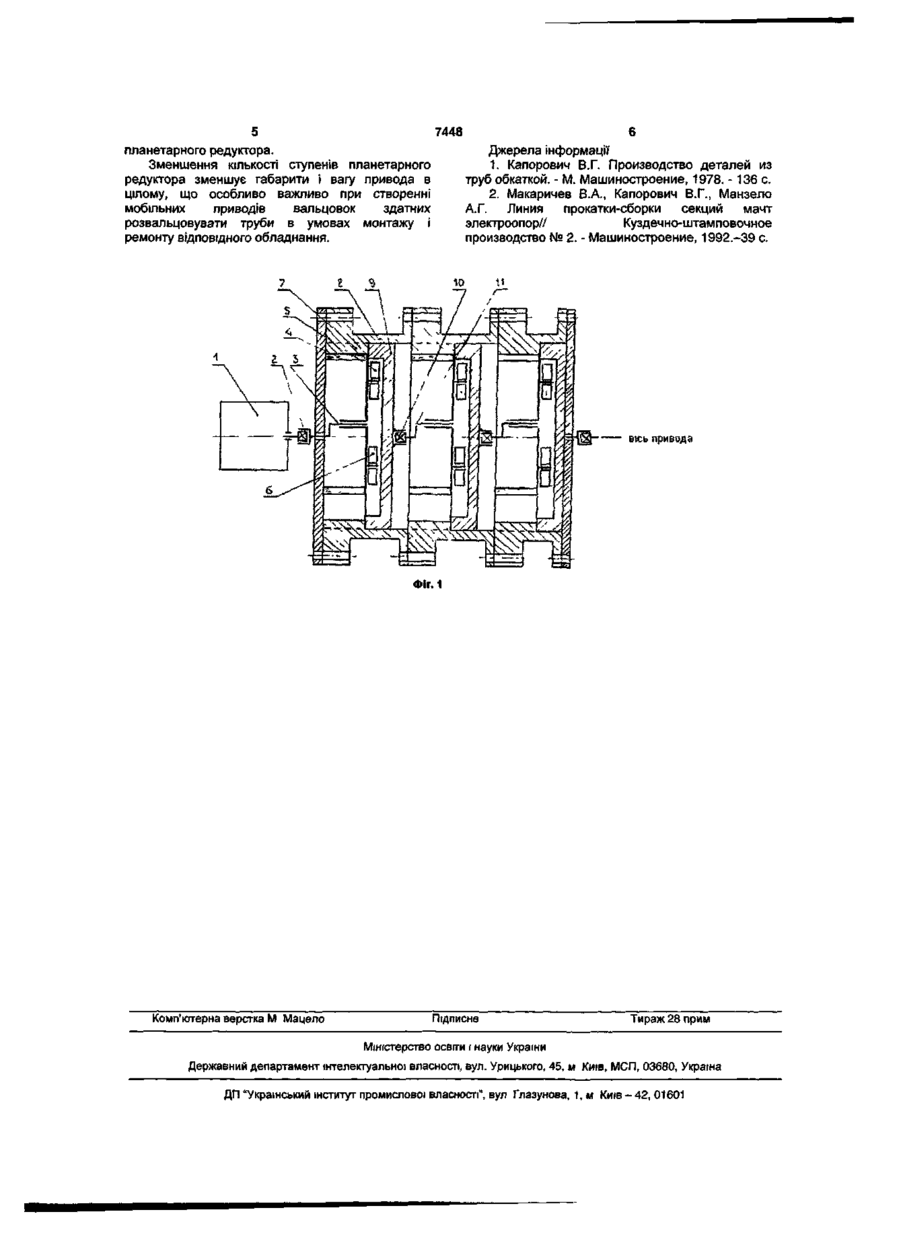
Планетарний привід обертального руху вальцювальної (обкатної) машини, що містить електродвигун і редуктор з двома парами циліндричних зубчатих коліс, який відрізняється тим, що складається з електричного, пневматичного або гідравлічного двигунів, а також ступінчастого планетарного редуктора з внутрішнім зачепленням зубчатих коліс з різницею кількості зубців в зубчатих парах від 1 до 3. Корисна модель відноситься до галузі техніки, а саме до пристроїв для з'єднання кінців труб і може знайти застосування в машинобудівній, нафтодобувній, газодобувній, енергетичній, при прокладці трубопроводів та інших галузях промисловості. Відома конструкція привода обертального руху вальцювальної машини, що вміщує електродвигун і редуктор на основі черв'ячної передачі [1]. Обертальний рух на робочий інструментвальцовку, в цьому випадку, передається від вала електродвигуна через черв'ячний редуктор, який зменшує оберти вала електродвигуна і підвищує обертальний момент на вихідному валу. Конструкція такого привода розрахована тільки на використання електродвигунів, має значні розміри і масу. Крім того, черв'ячні передачі мають малий коефіцієнт корисної дії, а також ускладнюють конструкцію привода, тому, що осі черв'яка і черв'ячного колеса перпендикулярні між собою. Черв'ячні передачі також не використовують в якості ступінчастих передач для отримання значних передаточних відношень. Найбільш близьким аналогом до корисної моделі, що заявляється, вибраним як прототип, є конструкція привода обертального руху вальцювальної машини, що вміщує електродвигун і редуктор з двома парами циліндричних зубчатих коліс зовнішнього зачеплення [2]. Обертальний рух на робочий інструментвальцовку, в цьому випадку, передається від вала електродвигуна через редуктор з двома парами зубчатих коліс зовнішнього зачеплення, який зменшує оберти вала електродвигуна і підвищує обертальний момент на вихідному валу редуктора. Конструкція такого привода передбачає використання тільки електродвигунів, має великі габарити і масу, завдяки великій відстані між осями зубчатих коліс зовнішнього зачеплення. Для отримання великих передаточних відношень такий редуктор потребує значної кількості ступенів, що ускладнює конструкцію і збільшує габарити і масу редукторів. Конструкції відомих приводів обертального руху вальцювальних машин відповідно прототипу передбачають в якості енергоносіїв використання електричної енергії і відрізняються типом редукторів. Вони мають значні габарити і масу і тому монтуються в цехах або майстернях стаціонарно на спеціалізованих станках зі станиною значної ваги. Сучасні вимоги виробництва потребують розташування машин для розвальцовки труб безпосередньо на робочих місцях монтажу або ремонту відповідного обладнання, що потребує їх мобільності. Так, наприклад, в нафтопереробній промисловості є потреба в приводах роликових вальцовок при розвальцовці труб в трубчатих печах в умовах монтажу і ремонту обладнання. Для розв'язання такої задачі необхідно розширити облік використання енергоносіїв і використовувати не тільки електроенергію, а і енергію стиснутого повітря або рідини (масла) відповідно можливостям того чи іншого підприємства або конкретних умов енергопостачання робочих місць монтажу і ремонту. со 00 7448 Таку вимогу забезпечує сумісність електродвигунів і малогабаритних високомоментних реверсивних пневматичних або гідравлічних двигунів з малогабаритними редукторами значного передаточного співвідношення. Сучасні реверсивні пневматичні двигуни, наприклад, з ексцентричною лопаткою, при невеликій їх ваги, здатні розвивати кутову швидкість в 6000об/хв. і утворювати потужність в 1к.с. (0,746квт.) при стандартному тиску повітря в магістральних трубопроводах. Велика частота обертання пневматичних і гідравлічних двигунів при використанні їх в приводах вальцовок потребує використання понижуючих редукторів з великим передаточним співвідношенням. В основу винаходу поставлена задача розробки приводу обертального руху мобільної вальцювальної машини для розвальцовки труб в умовах монтажу і ремонту обладнання. Поставлена задача вирішується за рахунок того, що конструкція приводу обертального руху вальцювальної машини складається з електричного, пневматичного або гідравлічного двигуна, а також ступінчатого планетарного редуктора не з зовнішнім, а з внутрішнім зачепленням зубчатих коліс і невеликою різницею кількості зубців в зубчатих парах, що забезпечує необхідне передаточне відношення при невеликих кількостях ступенів, габаритах і ваги редуктора і вальцювальної машини в цілому. На Фіг.1 зображена схема планетарного привода обертального руху вальцювальної машини, який вміщує: електро-, пневмо- або гідродвигун 1; муфта квадратного з'єднання валів двигуна і редуктора 2; ексцентричний вал першого ступеню планетарної передачі редуктора 3; зубчате рухоме колесо першого ступеню планетарної передачі редуктора 4; ролики або повзуни рухомого зубчатого колеса першого ступеню планетарної передачі редуктора 5, 6; нерухоме зубчате колесо першого ступеню планетарної передачі редуктора 7; фланцевий циліндричний корпус першого ступеню редуктора 8; муфта з діаметральним пазом першого ступеню планетарної передачі редуктора 9; муфта першого ступеню планетарної передачі редуктора під квадратний кінець ексцентричного валу другого ступеню планетарної передачі редуктора 10; ексцентричний вал рухомого зубчатого колеса другого ступеню планетарної передачі редуктора 11. Планетарний привод обертального руху вальцювальної машини працює таким чином. Обертальний рух від вихідного валу двигуна 1 через муфту квадратного з'єднання 2 передається на ексцентричний вал 3 першого ступеню планетарної передачі редуктора, на якому розташоване зубчате рухоме колесо 4 з роликами або повзунами 5 і 6, розташованими на відповідних осях (осі на Фіг.1 номерами не означені). Рухоме зубчате колесо 4 завдяки ексцентричному валу 3 знаходиться у внутрішньому зачепленні з нерухомим колесом 7, яке жорстко закріплене або виконане як одне ціле з фланчатим циліндричним корпусом 8 першого ступеню планетарного редуктора. Таким чином, рухоме колесо 4 оббігає нерухоме зубчате колесо 7 і отримує дві кутові швидкості, одна з яких переносна навколо осі планетарного привода, а друга відносна навколо ексцентричної осі ексцентричного валу 3. Відносна кутова швидкість рухомого зубчатого колеса 4 за допомогою двох роликів або повзунів 5 і 6 через повздовжній паз муфти 9, в який вони входять, передається самій муфті, що забезпечує компенсацію ексцентриситету ексцентричного вала 3 з насадженим на нього рухомим зубчатим колесом 4 відносно осі муфти 9, яка співпадає з віссю планетарного привода. Муфта 9 в свою чергу жорстко зв'язана або виконана як одне ціле з муфтою 10 під квадратний кінець ексцентричного вала 11 другого ступеню планетарного редуктора і, таким чином, відносний обертальний рух зубчатого колеса 4 першого ступеню зубчатої передачі планетарного редуктора передається на рухоме зубчате колесо другого ступеню планетарної зубчатої передачі редуктора (на Фіг.1 рухоме зубчате колесо другого ступеню номером не означене). В зв'язку з тим, що робота ступенів планетарного редуктора має аналогію, опис роботи першого ступеню планетарного редуктора і передачі обертального руху на другу ступінь являється достатнім. Запропонований привод обертального руху вальцювальної машини має планетарний ступінчатий редуктор, в якому в кожному його ступеню всього одна пара зубчатих коліс (рухома і нерухома) дає змогу отримати великий спектр передаточних відношень завдяки внутрішньому зачепленню зубчатої пари коліс з невеликою різницею кількості зубців між ними. Так, наприклад, для зубчатої пари з кількістю зубів Z2=51 і zi=48 (Z2-Zi=3) з модулем т = 2 передаточне відношення складає і=16, ексцентриситет е=3 мм і найбільша відстань між зубцями коліс S=2 MM. Для зубчатої пари Z2=52 і Zi=50, тобто коли різниця (Z2-Zi=2) з модулем т = 2 передаточне відношення складає і=25, ексцентриситет е=2 мм і відстань між зубцями коліс S=0. Найбільше передаточне відношення, таким чином, при різниці зубців z 2 -Zi=1. У цьому випадку воно дорівнює і=50. Для утворення щілини S між зубцями в двох останніх прикладах необхідно змінювати діаметр заготовки зовнішнього колеса і зменшуючи діаметр внутрішнього, наприклад, на величину Л =0,5 мм, загальна щільність S після нарізання зубців буде дорівнювати Д-, + Д 2 = 111 . Таким чином, можливість отримувати значні передаточні відношення тільки з одного ступеню планетарного редуктора, дає змогу зменшувати кількість його ступенів, що особливо важливо при розвальцовці труб великого діаметру, так як розвальцовка таких труб потребує великих обертальних моментів, для чого необхідно, без зменшення міцності двигунів, зменшувати кутову швидкість вихідних валів редукторів, що потребує значного збільшення передаточного відношення 7448 Джерела інформації 1. Капорович В.Г. Производство деталей из труб обкаткой. - М. Машиностроение, 1978. -136 с. 2. Макаричев В.А., Капорович В.Г., Манзело А.Г. Линия прокатки-сборки секций мачт электроопор// Куздечно-штамповочное производство № 2. - Машиностроение, 1992.-39 с. планетарного редуктора. Зменшення кількості ступенів планетарного редуктора зменшує габарити і вагу привода в цілому, що особливо важливо при створенні мобільних приводів вальцовок здатних розвальцовувати труби в умовах монтажу і ремонту відповідного обладнання. вісь привода Фіг. 1 Комп'ютерна верстка М Мацело Підписне Тираж 28 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPlanetary gear of rotary motion of a rolling (reeling) machine
Автори англійськоюFedorchenko Volodymyr Hryhorovych, Podliesnyi Serhii Volodymyrovych, Kryvun Valentyna Stepanivna
Назва патенту російськоюПланетарный привод вращательного движения вальцовочной (обкаточной) машины
Автори російськоюФедорченко Владимир Григорьевич, Подлесный Сергей Владимирович, Кривунь Валентина Степановна
МПК / Мітки
МПК: F16D 11/00
Мітки: машини, обкатної, обертального, вальцювальної, руху, привід, планетарний
Код посилання
<a href="https://ua.patents.su/4-7448-planetarnijj-privid-obertalnogo-rukhu-valcyuvalno-obkatno-mashini.html" target="_blank" rel="follow" title="База патентів України">Планетарний привід обертального руху вальцювальної (обкатної) машини</a>
Привід ходової частини гусеничної машини
Номер патенту: 6452
Опубліковано: 16.05.2005
Автори: Мізін Вадим Олександрович, Полунін Сергій Андрійович, Пальчик Володимир Станіславович, Лисак Дмитро Анатолійович
МПК: E21F 13/00, E21C 31/00
Мітки: привід, машини, гусеничної, частини, ходової
Формула / Реферат:
Привід ходової частини гусеничної машини, що містить циліндро-планетарний редуктор, обладнаний зубчастою муфтою, двигун із привідною шестірнею, кінематично зв'язаною з вхідним колесом планетарного модуля редуктора, що має зубчасту обойму внутрішнього зачеплення, з’єднану з зубчастою муфтою, і гальмо, який відрізняється тим, що двигун і гальмо пристиковані зовні до корпусу редуктора, привідна шестірня двигуна знаходиться в безпосередньому...
Вузол передачі обертального руху ланцюгового варіатора
Номер патенту: 30855
Опубліковано: 15.08.2002
Автор: Спісак Андрій Владиславович
МПК: F16H 9/02
Мітки: вузол, ланцюгового, варіатора, передачі, обертального, руху
Формула / Реферат:
1. Вузол передачі обертального руху ланцюгового варіатора, що містить корпус, вал, оснащений рухомими у радіальному напрямку з можливістю передачі на вал обертального руху секторами з закріпленими на їх кінцях зубчастими елементами для взаємодії з ролико-втулковим ланцюгом, який відрізняється тим, що вал має два діаметрально протилежні сектори, зубчасті елементи закріплені на секторі через важіль, зубчасті елементи кожного сектора виконані...
Привід круглов’язальної машини
Номер патенту: 66564
Опубліковано: 17.05.2004
Автори: Володін Сергій Олексійович, Піпа Борис Федорович
МПК: D04B 15/94
Мітки: привід, круглов'язальної, машини
Формула / Реферат:
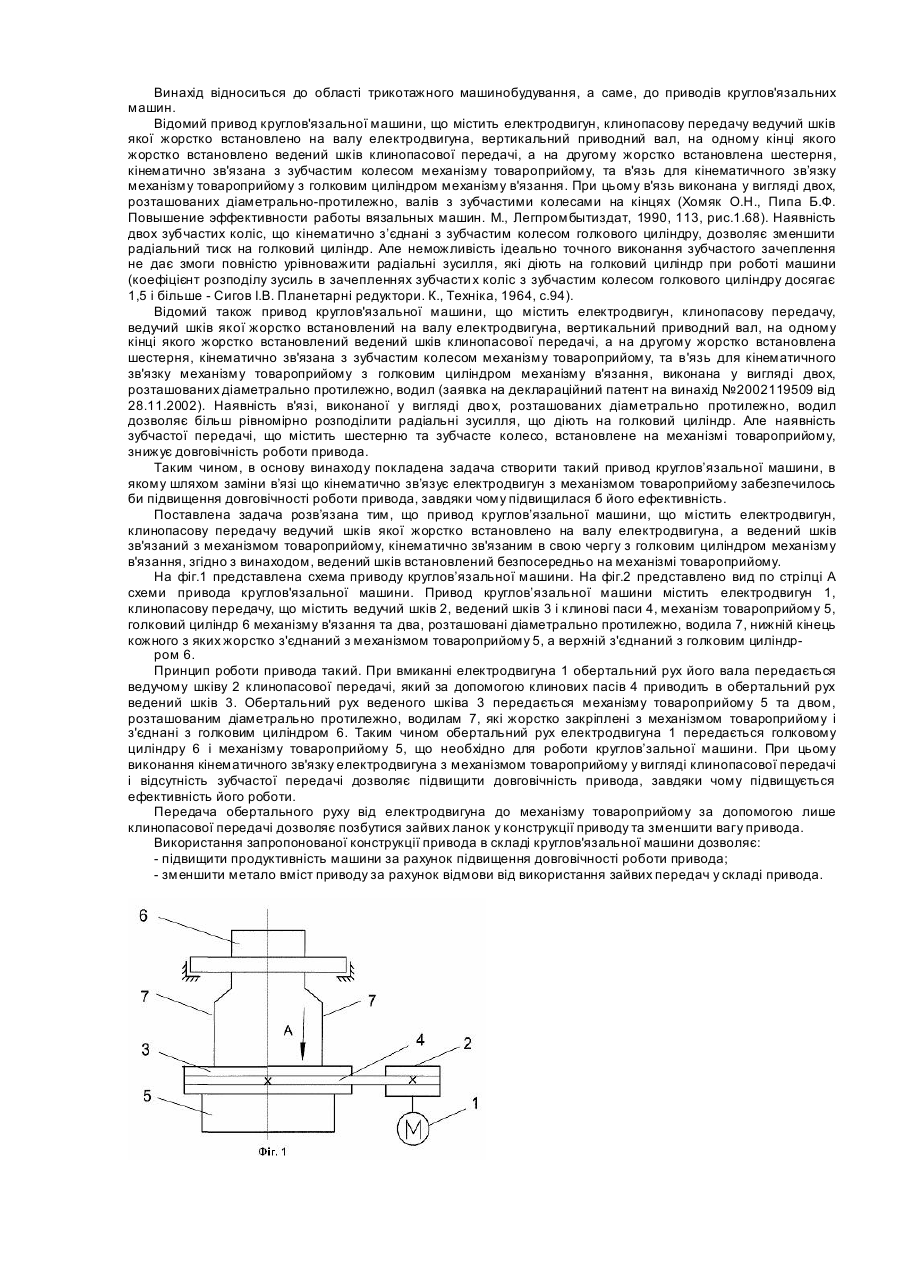
Привід круглов’язальної машини, що містить електродвигун, клинопасову передачу, ведучий шків якої жорстко встановлений на валу електродвигуна, а ведений шків зв'язаний з механізмом товароприйому, кінематично зв'язаним в свою чергу з голковим циліндром механізму в'язання, який відрізняється тим, що ведений шків клинопасової передачі встановлений безпосередньо на механізмі товароприйому.
Механізм щелкунова для перетворення обертального руху в коливальний
Номер патенту: 29369
Опубліковано: 16.10.2000
Автори: Прищепа Микола Петрович, Щелкунов Єгор Єлисейович, Вороной Віталій Степанович
МПК: F16H 21/40
Мітки: механізм, щелкунова, коливальний, перетворення, обертального, руху
Формула / Реферат:
1. Механізм для перетворення обертального руху в коливальний, що містить кривошип, кінематично зв’язаний з коромислом, який відрізняється тим, що кінематичний зв’язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа.2. Механізм за п. 1, який...
Планетарний редуктор з центральним валом
Номер патенту: 68615
Опубліковано: 16.08.2004
Автори: Щербіна Ніла Павлівна, Шебанов Володимир Олександрович
МПК: F16H 1/32
Мітки: валом, планетарний, центральним, редуктор
Формула / Реферат:
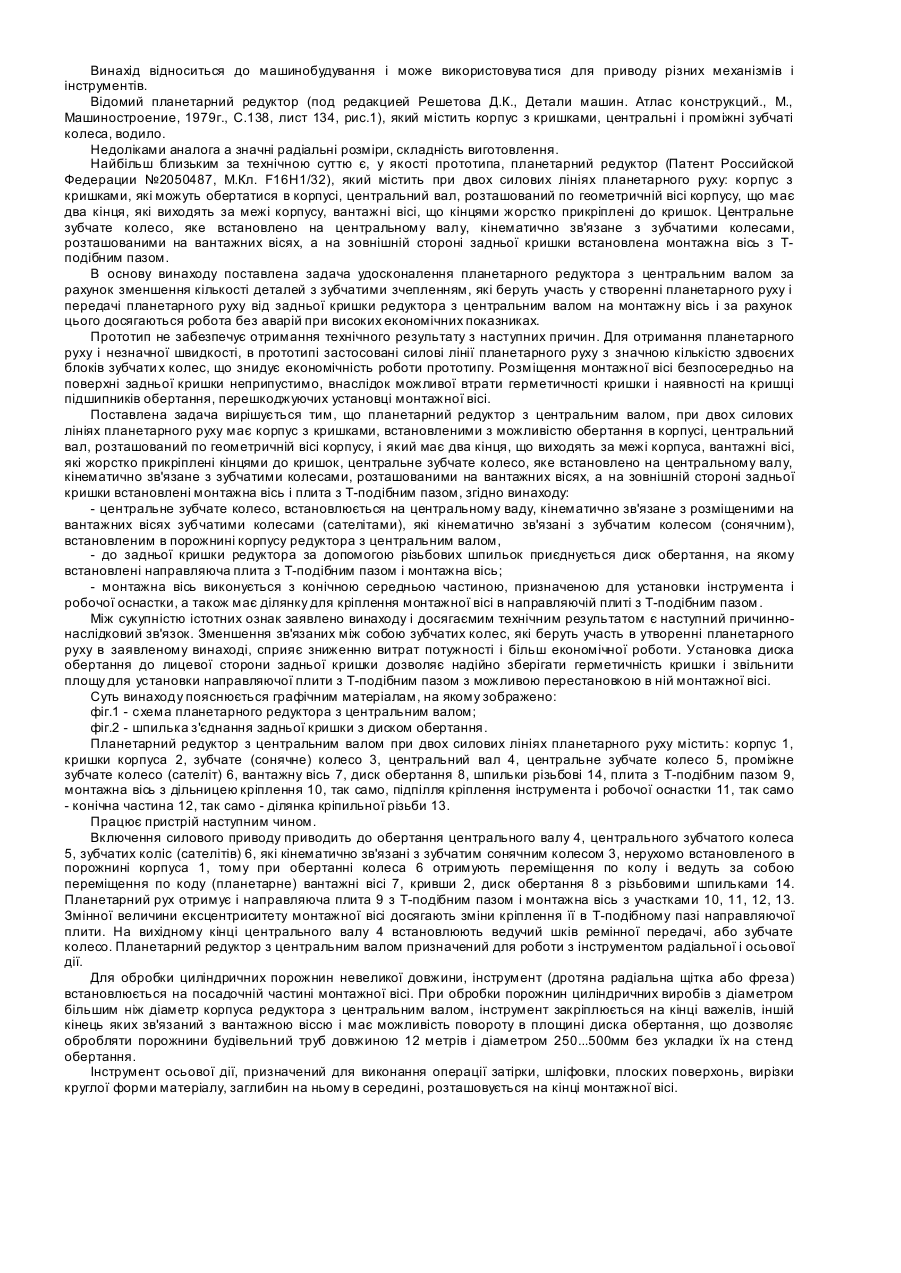
1. Планетарний редуктор з центральним валом, що при двох силових лініях планетарного руху, має корпус з кришками, встановленими з можливістю обертання в корпусі, центральний вал, розташований по геометричній осі корпусу і який має два кінці, які виходять за межі корпусу, вантажні осі, що жорстко кінцями прикріплені до кришок, а на зовнішній стороні задньої кришки встановлена монтажна вісь і плита з Т-подібним пазом, який відрізняється тим, що...
Попередній патент: Спосіб кількісного визначення новокаїнаміду
Наступний патент: Дисковий екструдер
Випадковий патент: Ствол міномета 120 мм на колісній основі