Оптична зі зворотним зв’язком слідкуюча система з позиціювання об’єкта
Номер патенту: 75216
Опубліковано: 15.03.2006
Автори: Мухаммад Рашик Улла Бейг Мирза, Парняков Євген Серафимович
Формула / Реферат
Оптична зі зворотним зв'язком слідкуюча система з позиціювання об'єкта, яка включає послідовно з'єднану нелінійну з зоною нечутливості ланку – позиційований об’єкт з відбиваючим елементом, наприклад дзеркалом, який встановлено на об’єкті позиціювання, вимірювач неузгодженості, підсилювач, блок формування сигналу керування і виконавчий привід, яка відрізняється тим, що в ній паралельно з вимірювачем неузгодженості приєднаний блок формування залишкового сигналу неузгодженості, при цьому додатковий вхід блока формування залишкового сигналу з'єднаний з виходом комутатора, вхід якого з'єднаний з блоком формування порогового сигналу неузгодженості, крім того, вихід блока формування залишкового сигналу неузгодженості з'єднаний з одним входом підсумовувача, а другий його вхід з'єднаний з вимірювачем сигналу спрацювання виконавчого приводу.
Текст
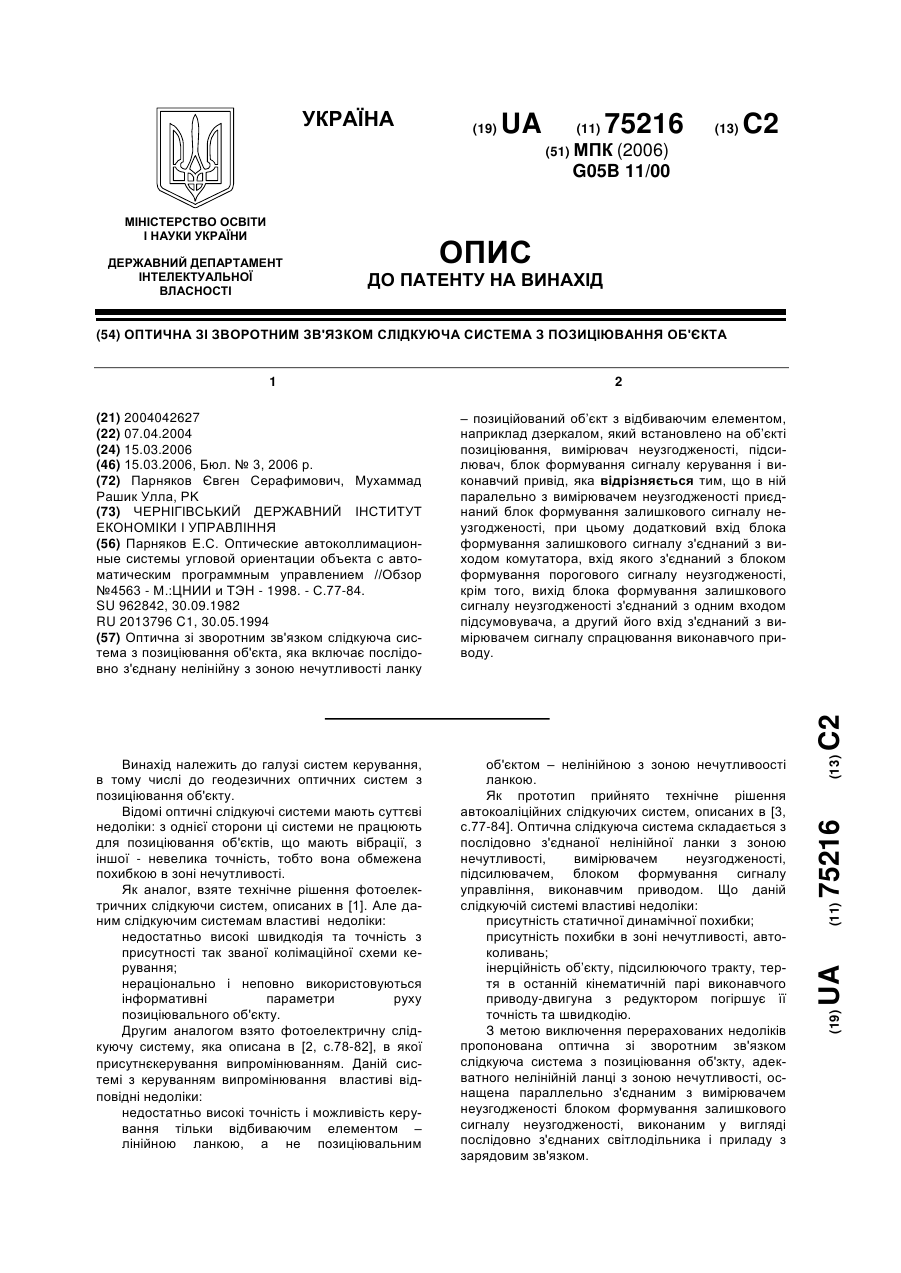
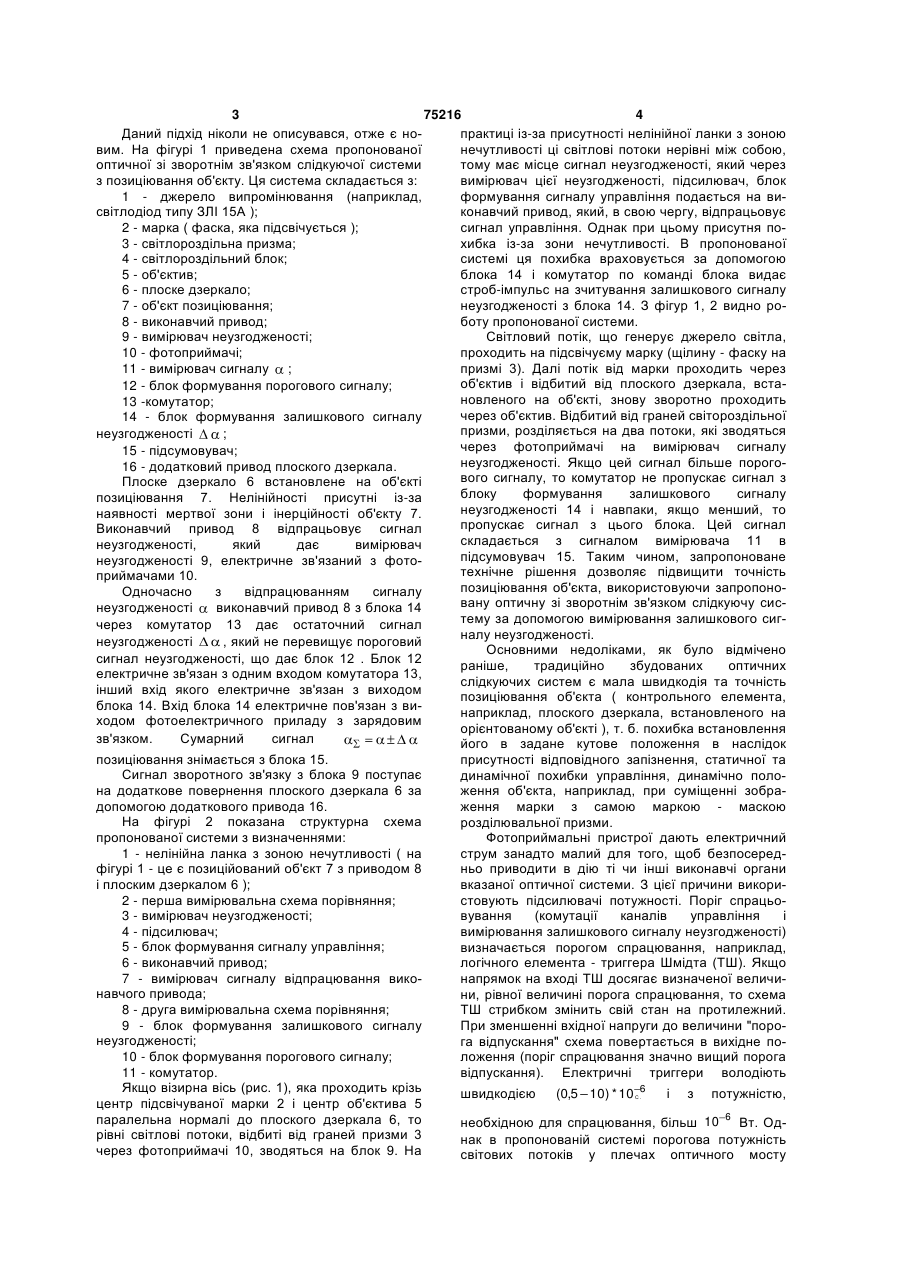
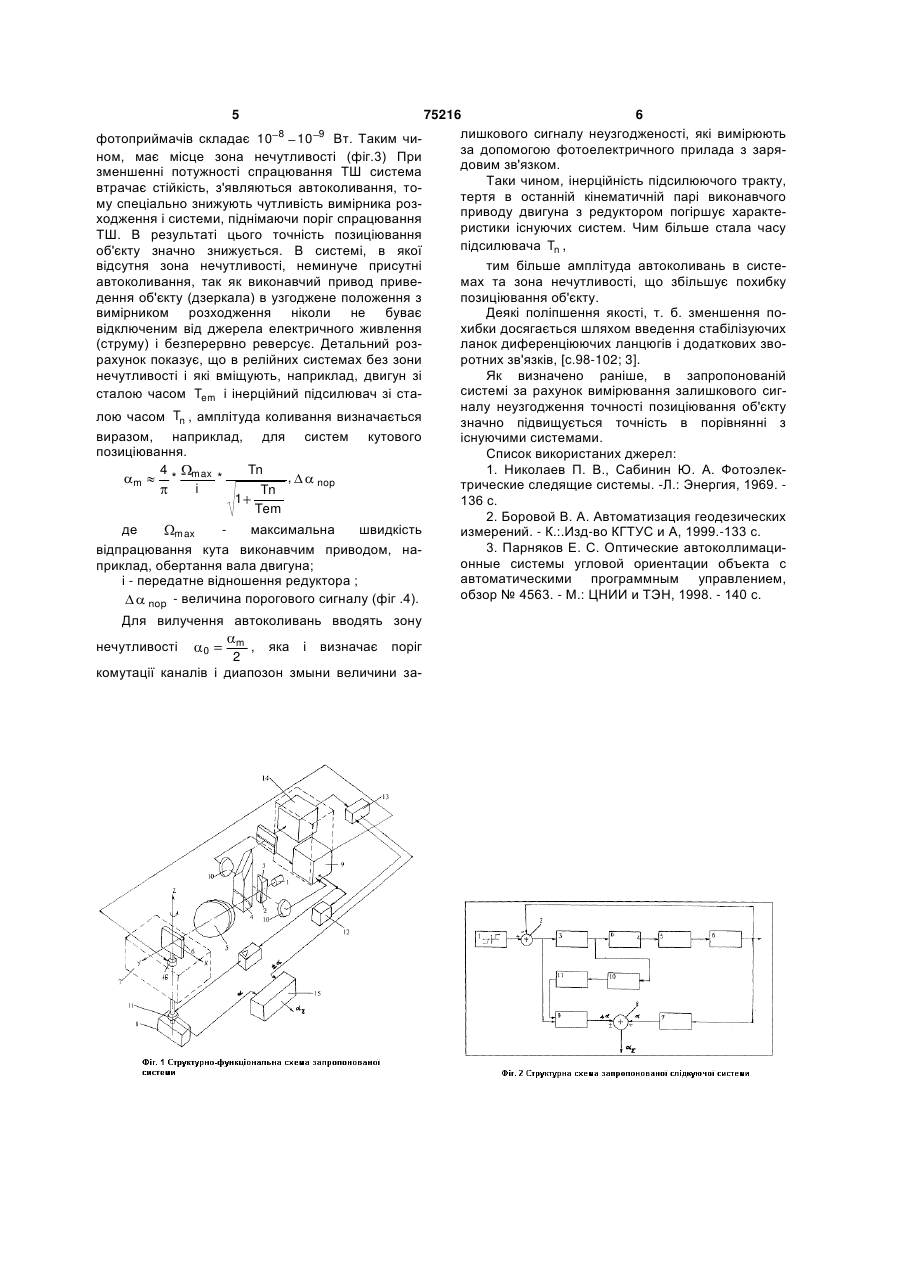
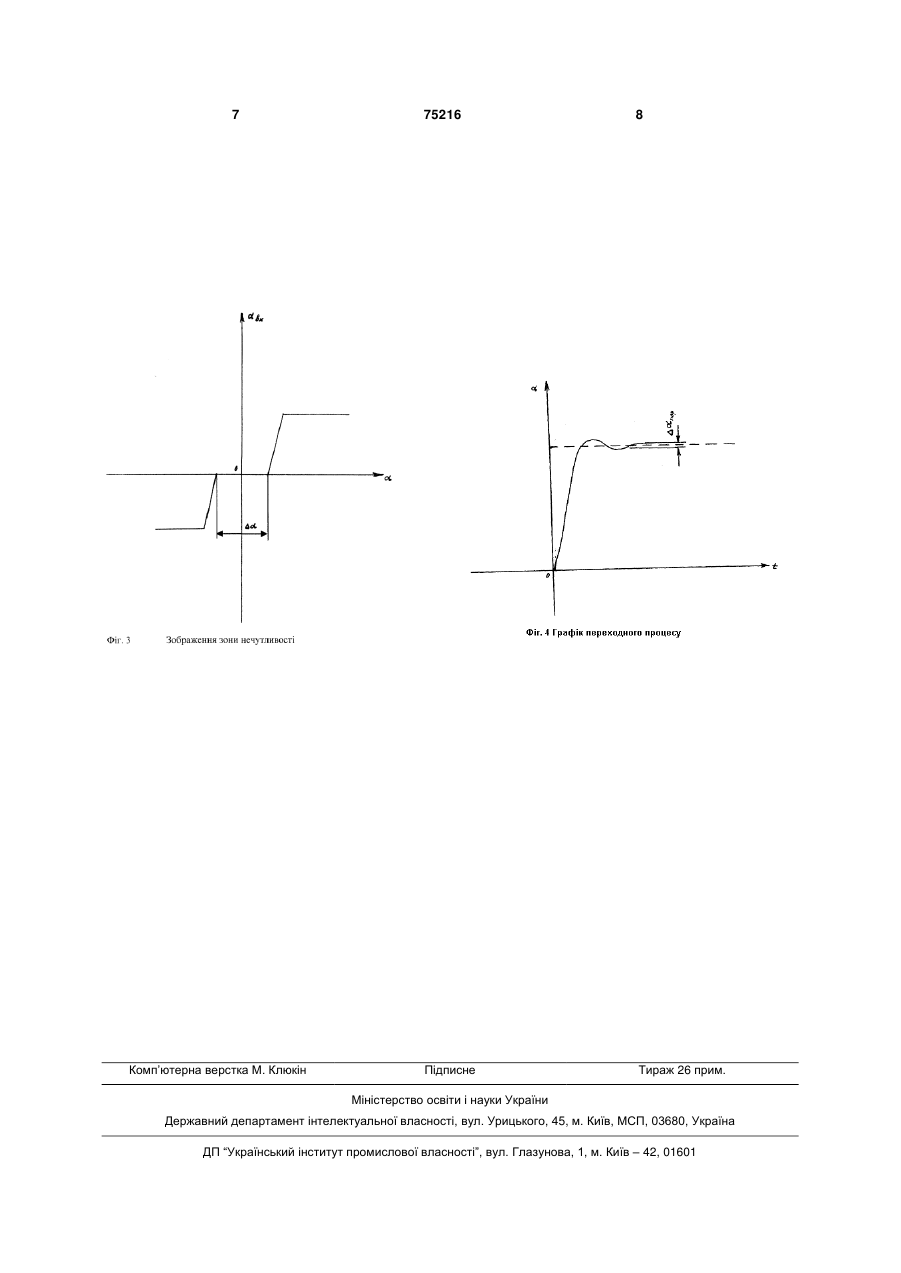
Оптична зі зворотним зв'язком слідкуюча система з позиціювання об'єкта, яка включає послідовно з'єднану нелінійну з зоною нечутливості ланку 3 75216 4 Даний підхід ніколи не описувався, отже є нопрактиці із-за присутності нелінійної ланки з зоною вим. На фігурі 1 приведена схема пропонованої нечутливості ці світлові потоки нерівні між собою, оптичної зі зворотнім зв'язком слідкуючої системи тому має місце сигнал неузгодженості, який через з позиціювання об'єкту. Ця система складається з: вимірювач цієї неузгодженості, підсилювач, блок 1 - джерело випромінювання (наприклад, формування сигналу управління подається на висвітлодіод типу ЗЛІ 15А ); конавчий привод, який, в свою чергу, відпрацьовує 2 - марка ( фаска, яка підсвічується ); сигнал управління. Однак при цьому присутня по3 - світлороздільна призма; хибка із-за зони нечутливості. В пропонованої 4 - світлороздільний блок; системі ця похибка враховується за допомогою 5 - об'єктив; блока 14 і комутатор по команді блока видає 6 - плоске дзеркало; строб-імпульс на зчитування залишкового сигналу 7 - об'єкт позиціювання; неузгодженості з блока 14. З фігур 1, 2 видно ро8 - виконавчий привод; боту пропонованої системи. 9 - вимірювач неузгодженості; Світловий потік, що генерує джерело світла, 10 - фотоприймачі; проходить на підсвічуєму марку (щілину - фаску на призмі 3). Далі потік від марки проходить через 11 - вимірювач сигналу ; об'єктив і відбитий від плоского дзеркала, вста12 - блок формування порогового сигналу; новленого на об'єкті, знову зворотно проходить 13 -комутатор; через об'єктив. Відбитий від граней світороздільної 14 - блок формування залишкового сигналу призми, розділяється на два потоки, які зводяться неузгодженості ; через фотоприймачі на вимірювач сигналу 15 - підсумовувач; неузгодженості. Якщо цей сигнал більше порого16 - додатковий привод плоского дзеркала. вого сигналу, то комутатор не пропускає сигнал з Плоске дзеркало 6 встановлене на об'єкті блоку формування залишкового сигналу позиціювання 7. Нелінійності присутні із-за неузгодженості 14 і навпаки, якщо менший, то наявності мертвої зони і інерційності об'єкту 7. пропускає сигнал з цього блока. Цей сигнал Виконавчий привод 8 відпрацьовує сигнал складається з сигналом вимірювача 11 в неузгодженості, який дає вимірювач підсумовувач 15. Таким чином, запропоноване неузгодженості 9, електричне зв'язаний з фототехнічне рішення дозволяє підвищити точність приймачами 10. позиціювання об'єкта, використовуючи запропоноОдночасно з відпрацюванням сигналу вану оптичну зі зворотнім зв'язком слідкуючу сиснеузгодженості виконавчий привод 8 з блока 14 тему за допомогою вимірювання залишкового сигчерез комутатор 13 дає остаточний сигнал налу неузгодженості. неузгодженості , який не перевищує пороговий Основними недоліками, як було відмічено сигнал неузгодженості, що дає блок 12 . Блок 12 раніше, традиційно збудованих оптичних електричне зв'язан з одним входом комутатора 13, слідкуючих систем є мала швидкодія та точність інший вхід якого електричне зв'язан з виходом позиціювання об'єкта ( контрольного елемента, блока 14. Вхід блока 14 електричне пов'язан з винаприклад, плоского дзеркала, встановленого на ходом фотоелектричного приладу з зарядовим орієнтованому об'єкті ), т. б. похибка встановлення зв'язком. Сумарний сигнал його в задане кутове положення в наслідок позиціювання знімається з блока 15. присутності відповідного запізнення, статичної та Сигнал зворотного зв'язку з блока 9 поступає динамічної похибки управління, динамічно полона додаткове повернення плоского дзеркала 6 за ження об'єкта, наприклад, при суміщенні зобрадопомогою додаткового привода 16. ження марки з самою маркою - маскою На фігурі 2 показана структурна схема розділювальної призми. пропонованої системи з визначеннями: Фотоприймальні пристрої дають електричний 1 - нелінійна ланка з зоною нечутливості ( на струм занадто малий для того, щоб безпосередфігурі 1 - це є позиційований об'єкт 7 з приводом 8 ньо приводити в дію ті чи інші виконавчі органи і плоским дзеркалом 6 ); вказаної оптичної системи. З цієї причини викори2 - перша вимірювальна схема порівняння; стовують підсилювачі потужності. Поріг спрацьо3 - вимірювач неузгодженості; вування (комутації каналів управління і 4 - підсилювач; вимірювання залишкового сигналу неузгодженості) 5 - блок формування сигналу управління; визначається порогом спрацювання, наприклад, 6 - виконавчий привод; логічного елемента - триггера Шмідта (ТШ). Якщо 7 - вимірювач сигналу відпрацювання виконапрямок на вході ТШ досягає визначеної величинавчого привода; ни, рівної величині порога спрацювання, то схема 8 - друга вимірювальна схема порівняння; ТШ стрибком змінить свій стан на протилежний. 9 - блок формування залишкового сигналу При зменшенні вхідної напруги до величини "поронеузгодженості; га відпускання" схема повертається в вихідне по10 - блок формування порогового сигналу; ложення (поріг спрацювання значно вищий порога 11 - комутатор. відпускання). Електричні триггери володіють Якщо візирна вісь (рис. 1), яка проходить крізь швидкодією (0,5 10) * 10 С.6 і з потужністю, центр підсвічуваної марки 2 і центр об'єктива 5 паралельна нормалі до плоского дзеркала 6, то необхідною для спрацювання, більш 10 6 Вт. Одрівні світлові потоки, відбиті від граней призми 3 нак в пропонованій системі порогова потужність через фотоприймачі 10, зводяться на блок 9. На світових потоків у плечах оптичного мосту 5 75216 6 лишкового сигналу неузгодженості, які вимірюють 10 фотоприймачів складає 10 Вт. Таким чиза допомогою фотоелектричного прилада з заряном, має місце зона нечутливості (фіг.3) При довим зв'язком. зменшенні потужності спрацювання ТШ система Таки чином, інерційність підсилюючого тракту, втрачає стійкість, з'являються автоколивання, тотертя в останній кінематичній парі виконавчого му спеціально знижують чутливість вимірника розприводу двигуна з редуктором погіршує характеходження і системи, піднімаючи поріг спрацювання ристики існуючих систем. Чим більше стала часу ТШ. В результаті цього точність позиціювання підсилювача Tn , об'єкту значно знижується. В системі, в якої відсутня зона нечутливості, неминуче присутні тим більше амплітуда автоколивань в систеавтоколивання, так як виконавчий привод привемах та зона нечутливості, що збільшує похибку дення об'єкту (дзеркала) в узгоджене положення з позиціювання об'єкту. вимірником розходження ніколи не буває Деякі поліпшення якості, т. б. зменшення повідключеним від джерела електричного живлення хибки досягається шляхом введення стабілізуючих (струму) і безперервно реверсує. Детальний розланок диференціюючих ланцюгів і додаткових зворахунок показує, що в релійних системах без зони ротних зв'язків, [с.98-102; 3]. нечутливості і які вміщують, наприклад, двигун зі Як визначено раніше, в запропонованій системі за рахунок вимірювання залишкового сигсталою часом Tem і інерційний підсилювач зі станалу неузгодження точності позиціювання об'єкту лою часом Tn , амплітуда коливання визначається значно підвищується точність в порівнянні з виразом, наприклад, для систем кутового існуючими системами. позиціювання. Список використаних джерел: 1. Николаев П. В., Сабинин Ю. А. Фотоэлек4 Tn * max * , m nop трические следящие системы. -Л.: Энергия, 1969. i Tn 1 136 с. Tem 2. Боровой В. А. Автоматизация геодезических де максимальна швидкість измерений. - К.:.Изд-во КГТУС и А, 1999.-133 с. max 3. Парняков Е. С. Оптические автоколлимацивідпрацювання кута виконавчим приводом, наонные системы угловой ориентации объекта с приклад, обертання вала двигуна; автоматическими программным управлением, і - передатне відношення редуктора ; обзор № 4563. - М.: ЦНИИ и ТЭН, 1998. - 140 с. - величина порогового сигналу (фіг .4). 8 9 nop Для вилучення автоколивань вводять зону m , яка і визначає поріг 2 комутації каналів і диапозон змыни величини за нечутливості 0 7 Комп’ютерна верстка М. Клюкін 75216 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюOptical tracking system with feedback designed for controlling the position of an object
Автори англійськоюParniakov Yevhen Serafymovych
Назва патенту російськоюОптическая следящая система с обратной связью, предназначенная для управления положением объекта
Автори російськоюПарняков Евгений Серафимович
МПК / Мітки
МПК: G05B 11/00
Мітки: зворотним, слідкуюча, позиціювання, оптична, система, об'єкта, зв'язком
Код посилання
<a href="https://ua.patents.su/4-75216-optichna-zi-zvorotnim-zvyazkom-slidkuyucha-sistema-z-poziciyuvannya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Оптична зі зворотним зв’язком слідкуюча система з позиціювання об’єкта</a>
Слідкуюча система
Номер патенту: 62671
Опубліковано: 15.12.2003
Автори: Субота Анатолій Максимович, Соколов Юрий Миколайович, Клименко Віталій Валерійович, Мухлаєв Сергій Вікторович
МПК: G05B 11/01, G05B 19/02, F15B 9/00, G06F 11/07
Формула / Реферат:
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додатково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним...
Слідкуюча система
Номер патенту: 63756
Опубліковано: 15.08.2005
Автори: Стеба Олександр Михайлович, Мотуз Георгій Іванович, Орляк Микола Васильович, Корсун Валентин Петрович, Стефанович Віктор Тарасович, Старков Юрій Володимирович, Кралін Володимир Всеволодович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
Копіювальна слідкуюча система пропорційного керування для металорізальних верстатів
Номер патенту: 9773
Опубліковано: 30.09.1996
Автори: Лавріненко Анатолій Костянтинович, Дубров Борис Іванович
МПК: B23Q 35/00
Мітки: система, верстатів, пропорційного, копіювальна, слідкуюча, керування, металорізальних
Формула / Реферат:
(57) Копировальная следящая система пропорционального управления для металлорежущих станков, содержащая копировальный датчик, предварительный усилитель-выпрямитель, усилители сигналов задающего и следящего каналов и электроприводов, отличающаяся тем, что она снабжена дистанционным регулятором чувствительности датчика, преобразователем уровня, блоком выделения модуля сигнала и нелинейными блоками, причем вход регулятора чувствительности...
Оптична система з виділенням рухомих фігур
Номер патенту: 28745
Опубліковано: 16.10.2000
Автор: Чугуй Володимир Леонідович
МПК: G02B 23/00
Мітки: рухомих, оптична, фігур, виділенням, система
Формула / Реферат:
Оптична система з виділенням рухомих фігур, яка вміщує канал візира, в якому розміщені об’єктив, обертальна система, окуляр, яка відрізняється тим, що в канал візира додатково залучені перший світлоділильний куб, прозора пластина з рисками у вигляді сітки, другий світлоділильний куб, перший світлоділильний куб, розміщений по ходу променів між об’єктивом і обертальною системою, пластина, розміщена між першим світлоділильним кубом і...
Волоконно-оптична система інтервальних вимірювань фізичних величин
Номер патенту: 54286
Опубліковано: 17.02.2003
Автор: Шабатура Юрій Васильович
МПК: H04B 10/00
Мітки: волоконно-оптична, інтервальних, фізичних, вимірювань, величин, система
Формула / Реферат:
Волоконно-оптична система інтервальних вимірювань фізичних величин, що містить послідовно з'єднані за допомогою відрізків волоконних світловодів випромінювач, n волоконно-оптичних датчиків і фотоприймач, вихід якого з'єднаний з блоком обробки, яка відрізняється тим, що датчики виконані як вимірювальні блоки, на вході кожного з яких встановлений оптичний розгалужувач, перший вихід якого з'єднаний з коротким відрізком волоконного світловоду...
Попередній патент: Спосіб одержання циклічних сполук та ізонітрил, зв’язаний на смолі
Наступний патент: Супорт колесотокарного верстата
Випадковий патент: Спосіб живлення від конденсатора