Система управління дозуючим пристроєм
Номер патенту: 76140
Опубліковано: 25.12.2012
Автори: Джулгаков Віталій Георгійович, Артеменко Дмитро Олександрович, Солов'ян Карина Андріївна

Формула / Реферат
Система управління дозуючим пристроєм, що містить шнек, яка відрізняється тим, що в неї введені послідовно з'єднані задавач, перший суматор, третій коригувальний пристрій, другий суматор, другий коригувальний пристрій, третій суматор, перший коригувальний пристрій, підсилювач потужності, електродвигун, редуктор, вихід якого з'єднаний з входом шнека, вихід якого з'єднаний з входом блока динаміки насипання, вихід якого через тензодатчик, а також вихід шнека через датчик кутового положення (енкодер) та вихід електродвигуна через тахогенератор сполучені з другими входами першого, другого та третього суматорів відповідно, вхід задавача є входом системи, вихід блока динаміки насипання є виходом системи.
Текст
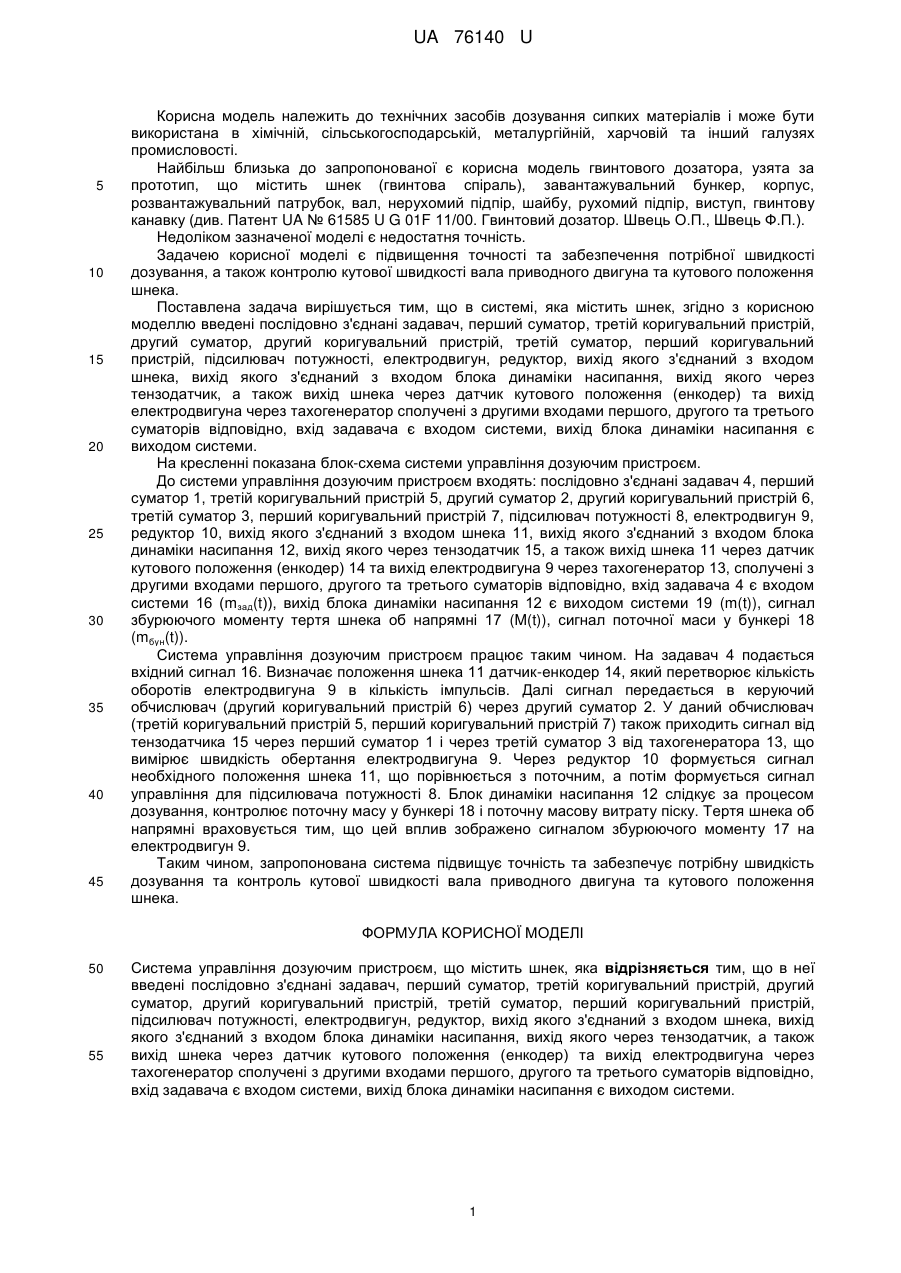
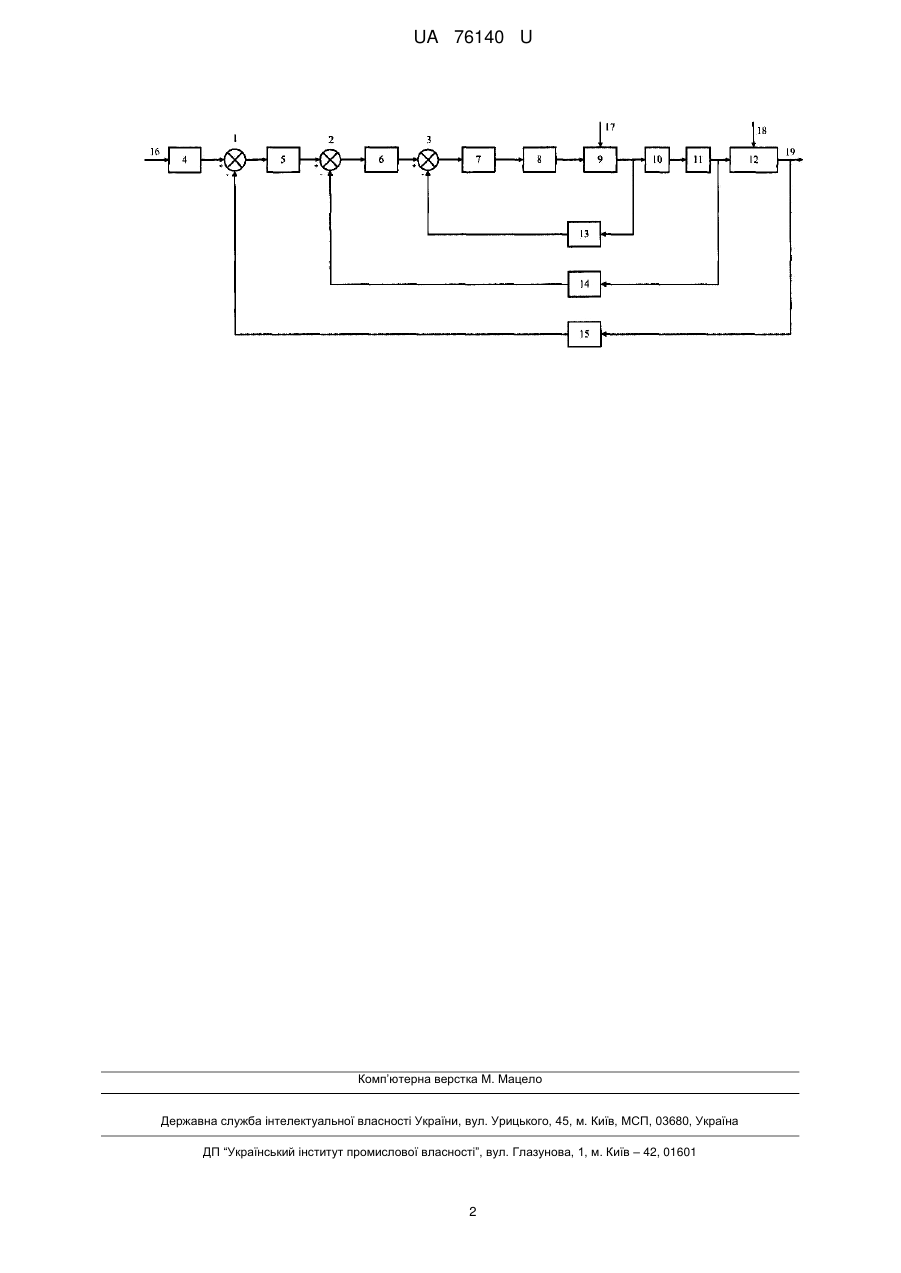
Реферат: UA 76140 U UA 76140 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до технічних засобів дозування сипких матеріалів і може бути використана в хімічній, сільськогосподарській, металургійній, харчовій та інший галузях промисловості. Найбільш близька до запропонованої є корисна модель гвинтового дозатора, узята за прототип, що містить шнек (гвинтова спіраль), завантажувальний бункер, корпус, розвантажувальний патрубок, вал, нерухомий підпір, шайбу, рухомий підпір, виступ, гвинтову канавку (див. Патент UA № 61585 U G 01F 11/00. Гвинтовий дозатор. Швець О.П., Швець Ф.П.). Недоліком зазначеної моделі є недостатня точність. Задачею корисної моделі є підвищення точності та забезпечення потрібної швидкості дозування, а також контролю кутової швидкості вала приводного двигуна та кутового положення шнека. Поставлена задача вирішується тим, що в системі, яка містить шнек, згідно з корисною моделлю введені послідовно з'єднані задавач, перший суматор, третій коригувальний пристрій, другий суматор, другий коригувальний пристрій, третій суматор, перший коригувальний пристрій, підсилювач потужності, електродвигун, редуктор, вихід якого з'єднаний з входом шнека, вихід якого з'єднаний з входом блока динаміки насипання, вихід якого через тензодатчик, а також вихід шнека через датчик кутового положення (енкодер) та вихід електродвигуна через тахогенератор сполучені з другими входами першого, другого та третього суматорів відповідно, вхід задавача є входом системи, вихід блока динаміки насипання є виходом системи. На кресленні показана блок-схема системи управління дозуючим пристроєм. До системи управління дозуючим пристроєм входять: послідовно з'єднані задавач 4, перший суматор 1, третій коригувальний пристрій 5, другий суматор 2, другий коригувальний пристрій 6, третій суматор 3, перший коригувальний пристрій 7, підсилювач потужності 8, електродвигун 9, редуктор 10, вихід якого з'єднаний з входом шнека 11, вихід якого з'єднаний з входом блока динаміки насипання 12, вихід якого через тензодатчик 15, а також вихід шнека 11 через датчик кутового положення (енкодер) 14 та вихід електродвигуна 9 через тахогенератор 13, сполучені з другими входами першого, другого та третього суматорів відповідно, вхід задавача 4 є входом системи 16 (mзад(t)), вихід блока динаміки насипання 12 є виходом системи 19 (m(t)), сигнал збурюючого моменту тертя шнека об напрямні 17 (M(t)), сигнал поточної маси у бункері 18 (mбyн(t)). Система управління дозуючим пристроєм працює таким чином. На задавач 4 подається вхідний сигнал 16. Визначає положення шнека 11 датчик-енкодер 14, який перетворює кількість оборотів електродвигуна 9 в кількість імпульсів. Далі сигнал передається в керуючий обчислювач (другий коригувальний пристрій 6) через другий суматор 2. У даний обчислювач (третій коригувальний пристрій 5, перший коригувальний пристрій 7) також приходить сигнал від тензодатчика 15 через перший суматор 1 і через третій суматор 3 від тахогенератора 13, що вимірює швидкість обертання електродвигуна 9. Через редуктор 10 формується сигнал необхідного положення шнека 11, що порівнюється з поточним, а потім формується сигнал управління для підсилювача потужності 8. Блок динаміки насипання 12 слідкує за процесом дозування, контролює поточну масу у бункері 18 і поточну масову витрату піску. Тертя шнека об напрямні враховується тим, що цей вплив зображено сигналом збурюючого моменту 17 на електродвигун 9. Таким чином, запропонована система підвищує точність та забезпечує потрібну швидкість дозування та контроль кутової швидкості вала приводного двигуна та кутового положення шнека. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Система управління дозуючим пристроєм, що містить шнек, яка відрізняється тим, що в неї введені послідовно з'єднані задавач, перший суматор, третій коригувальний пристрій, другий суматор, другий коригувальний пристрій, третій суматор, перший коригувальний пристрій, підсилювач потужності, електродвигун, редуктор, вихід якого з'єднаний з входом шнека, вихід якого з'єднаний з входом блока динаміки насипання, вихід якого через тензодатчик, а також вихід шнека через датчик кутового положення (енкодер) та вихід електродвигуна через тахогенератор сполучені з другими входами першого, другого та третього суматорів відповідно, вхід задавача є входом системи, вихід блока динаміки насипання є виходом системи. 1 UA 76140 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of a measuring device
Автори англійськоюDzhulhakov Vitalii Heorhiiovych, Solovian Karyna Andriivna, Artemenko Dmytro Oleksandrovych
Назва патенту російськоюСистема управления дозирующим устройством
Автори російськоюДжулгаков Виталий Георгиевич, Соловьян Карина Андреевна, Артеменко Дмитрий Александрович
МПК / Мітки
МПК: G01F 11/00
Мітки: система, пристроєм, управління, дозуючим
Код посилання
<a href="https://ua.patents.su/4-76140-sistema-upravlinnya-dozuyuchim-pristroehm.html" target="_blank" rel="follow" title="База патентів України">Система управління дозуючим пристроєм</a>
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Бандура Іван Миколайович, Шпак Ганна Сергіївна, Дибська Ирина Юріївна
МПК: G05B 13/00
Мітки: управління, система, нелінійна, адаптивна
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Шемшур Микола Володимирович, Бандура Іван Миколайович, Рудико Оксана Вікторівна
МПК: G05B 13/00
Мітки: система, адаптивна, управління
Формула / Реферат:
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій...
Система управління газотурбінним двигуном з реверсивним пристроєм
Номер патенту: 39341
Опубліковано: 15.06.2001
Автори: Пономаренко Анатолій Олександрович, Мокроуз Василь Климентьйович, Волковський Сергій Валентинович
МПК: B64D 31/00, F02C 9/00
Мітки: газотурбінним, реверсивним, управління, пристроєм, система, двигуном
Формула / Реферат:
Система управління газотурбінним двигуном з реверсивним пристроєм, що містить важіль управління двигуном, сполучений з важелем управління реверсивним пристроєм, які сполучені важільно-тросовою проводкою з сектором паливного регулювальника, взаємодіючого із золотниковим агрегатом управління реверсивним пристроєм, важелі і тяги, яка відрізняється тим, що агрегат управління реверсивним пристроєм виконаний у вигляді автономного...
Система автоматичного управління
Номер патенту: 29261
Опубліковано: 16.10.2000
Автор: Самедов Юсіф Фахрат огли
МПК: G05B 11/42
Мітки: управління, система, автоматичного
Формула / Реферат:
Система автоматичного управління, яка містить елемент порівняння, перший вхід якого є входом системи, а другий вхід є з'єднаний з виходом об'єкта управління, вхід якого підключений до виходу суматору, два підсилювача, де вихід першого підсилювача з'єднаний з першим входом суматора, інтегратор, диференціатор, до виходу якого першим входом підключений підсумуючий підсилювач, а його другий вхід зв'язаний з виходом елемента порівняння і входом...
Система управління літальним апаратом
Номер патенту: 63736
Опубліковано: 15.01.2004
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: апаратом, літальним, управління, система
Формула / Реферат:
Система управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості і датчик кутового прискорення літального апарата, яка відрізняється тим, що в ній до датчика кутового положення важеля управління під'єднано перший диференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до...
Попередній патент: Система визначення місцезнаходження рухомого об’єкта
Наступний патент: Інформаційно-діагностична система
Випадковий патент: Спосіб виробництва ферментованого біфідовмісного молочно-цикорного напою