Спосіб керування рухом багатоланкового транспортного засобу
Номер патенту: 76268
Опубліковано: 25.12.2012
Автори: Сахно Володимир Прохорович, Марчук Роман Миколайович, Поляков Віктор Михайлович, Марчук Назар Миколайович, Стрілець Володимир Миколайович

Формула / Реферат
Спосіб керування рухом багатоланкового транспортного засобу, що здійснюється за рахунок магнітної головки, яка виконує запис траєкторії ведучої ланки на проїжджій частині, яка містить магнітну речовину і подає інформацію на колеса веденої ланки, який відрізняється тим, що на колесах ведучої ланки встановлені давачі частоти їх обертання, а керування частотою обертання коліс ведених ланок виконується за рахунок регулювання тиску в гальмівних камерах і здійснюється на основі інформації давачів частоти обертання коліс ведучої ланки на блок управління, який регулює тиск в гальмівних камерах коліс ведених ланок таким чином, що при повороті наліво пригальмовуються колеса правого борту, а при повороті направо - колеса лівого борту ведених ланок.
Текст
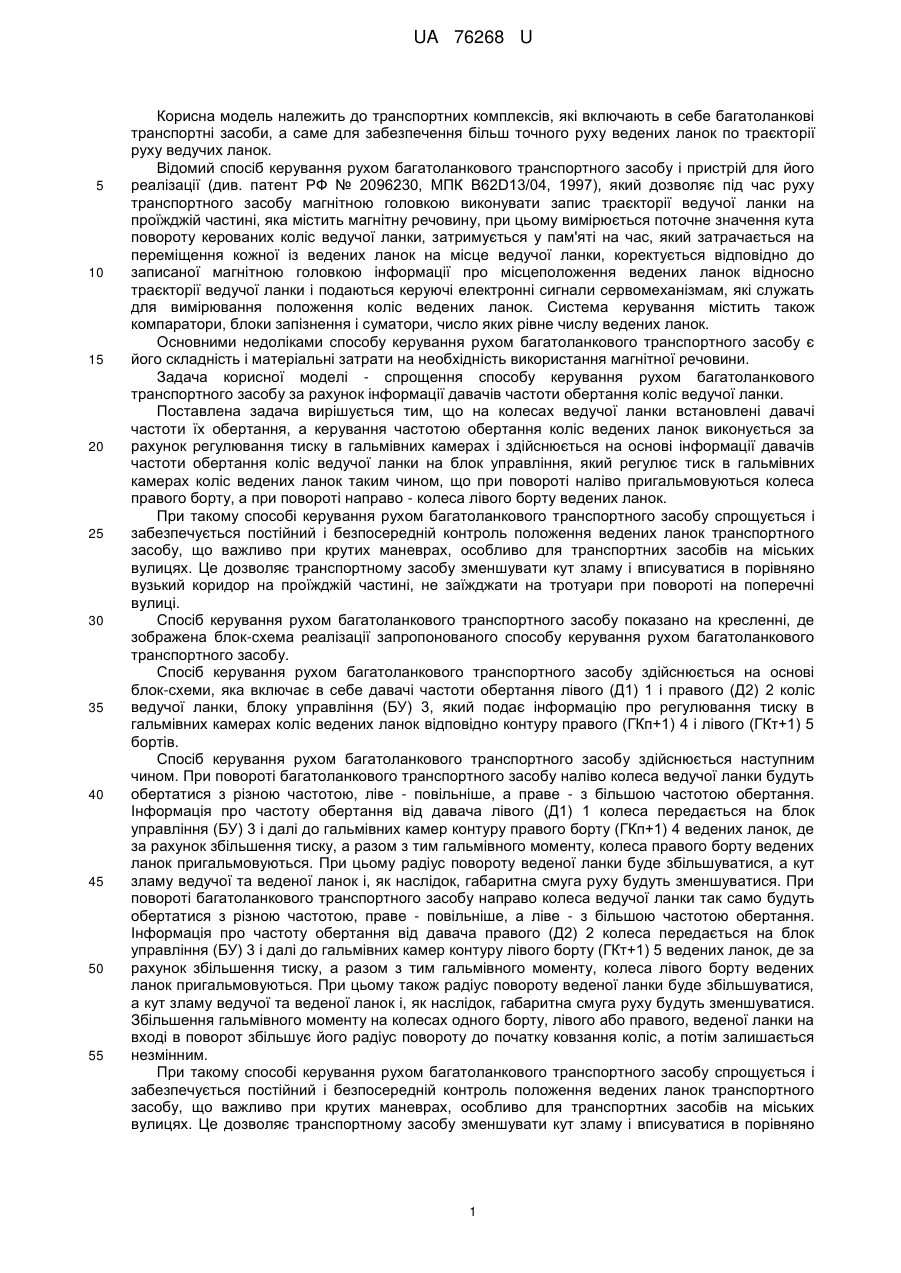
Реферат: Спосіб керування рухом багатоланкового транспортного засобу здійснюється за рахунок магнітної головки, яка виконує запис траєкторії ведучої ланки на проїжджій частині, яка містить магнітну речовину і подає інформацію на колеса веденої ланки. На колесах ведучої ланки встановлені давачі частоти їх обертання, а керування частотою обертання коліс ведених ланок виконується за рахунок регулювання тиску в гальмівних камерах і здійснюється на основі інформації давачів частоти обертання коліс ведучої ланки на блок управління, який регулює тиск в гальмівних камерах коліс ведених ланок таким чином, що при повороті наліво пригальмовуються колеса правого борту, а при повороті направо - колеса лівого борту ведених ланок. UA 76268 U (54) СПОСІБ КЕРУВАННЯ РУХОМ БАГАТОЛАНКОВОГО ТРАНСПОРТНОГО ЗАСОБУ UA 76268 U UA 76268 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до транспортних комплексів, які включають в себе багатоланкові транспортні засоби, а саме для забезпечення більш точного руху ведених ланок по траєкторії руху ведучих ланок. Відомий спосіб керування рухом багатоланкового транспортного засобу і пристрій для його реалізації (див. патент РФ № 2096230, МПК В62D13/04, 1997), який дозволяє під час руху транспортного засобу магнітною головкою виконувати запис траєкторії ведучої ланки на проїжджій частині, яка містить магнітну речовину, при цьому вимірюється поточне значення кута повороту керованих коліс ведучої ланки, затримується у пам'яті на час, який затрачається на переміщення кожної із ведених ланок на місце ведучої ланки, коректується відповідно до записаної магнітною головкою інформації про місцеположення ведених ланок відносно траєкторії ведучої ланки і подаються керуючі електронні сигнали сервомеханізмам, які служать для вимірювання положення коліс ведених ланок. Система керування містить також компаратори, блоки запізнення і суматори, число яких рівне числу ведених ланок. Основними недоліками способу керування рухом багатоланкового транспортного засобу є його складність і матеріальні затрати на необхідність використання магнітної речовини. Задача корисної моделі - спрощення способу керування рухом багатоланкового транспортного засобу за рахунок інформації давачів частоти обертання коліс ведучої ланки. Поставлена задача вирішується тим, що на колесах ведучої ланки встановлені давачі частоти їх обертання, а керування частотою обертання коліс ведених ланок виконується за рахунок регулювання тиску в гальмівних камерах і здійснюється на основі інформації давачів частоти обертання коліс ведучої ланки на блок управління, який регулює тиск в гальмівних камерах коліс ведених ланок таким чином, що при повороті наліво пригальмовуються колеса правого борту, а при повороті направо - колеса лівого борту ведених ланок. При такому способі керування рухом багатоланкового транспортного засобу спрощується і забезпечується постійний і безпосередній контроль положення ведених ланок транспортного засобу, що важливо при крутих маневрах, особливо для транспортних засобів на міських вулицях. Це дозволяє транспортному засобу зменшувати кут зламу і вписуватися в порівняно вузький коридор на проїжджій частині, не заїжджати на тротуари при повороті на поперечні вулиці. Спосіб керування рухом багатоланкового транспортного засобу показано на кресленні, де зображена блок-схема реалізації запропонованого способу керування рухом багатоланкового транспортного засобу. Спосіб керування рухом багатоланкового транспортного засобу здійснюється на основі блок-схеми, яка включає в себе давачі частоти обертання лівого (Д1) 1 і правого (Д2) 2 коліс ведучої ланки, блоку управління (БУ) 3, який подає інформацію про регулювання тиску в гальмівних камерах коліс ведених ланок відповідно контуру правого (ГКп+1) 4 і лівого (ГКт+1) 5 бортів. Спосіб керування рухом багатоланкового транспортного засобу здійснюється наступним чином. При повороті багатоланкового транспортного засобу наліво колеса ведучої ланки будуть обертатися з різною частотою, ліве - повільніше, а праве - з більшою частотою обертання. Інформація про частоту обертання від давача лівого (Д1) 1 колеса передається на блок управління (БУ) 3 і далі до гальмівних камер контуру правого борту (ГКп+1) 4 ведених ланок, де за рахунок збільшення тиску, а разом з тим гальмівного моменту, колеса правого борту ведених ланок пригальмовуються. При цьому радіус повороту веденої ланки буде збільшуватися, а кут зламу ведучої та веденої ланок і, як наслідок, габаритна смуга руху будуть зменшуватися. При повороті багатоланкового транспортного засобу направо колеса ведучої ланки так само будуть обертатися з різною частотою, праве - повільніше, а ліве - з більшою частотою обертання. Інформація про частоту обертання від давача правого (Д2) 2 колеса передається на блок управління (БУ) 3 і далі до гальмівних камер контуру лівого борту (ГКт+1) 5 ведених ланок, де за рахунок збільшення тиску, а разом з тим гальмівного моменту, колеса лівого борту ведених ланок пригальмовуються. При цьому також радіус повороту веденої ланки буде збільшуватися, а кут зламу ведучої та веденої ланок і, як наслідок, габаритна смуга руху будуть зменшуватися. Збільшення гальмівного моменту на колесах одного борту, лівого або правого, веденої ланки на вході в поворот збільшує його радіус повороту до початку ковзання коліс, а потім залишається незмінним. При такому способі керування рухом багатоланкового транспортного засобу спрощується і забезпечується постійний і безпосередній контроль положення ведених ланок транспортного засобу, що важливо при крутих маневрах, особливо для транспортних засобів на міських вулицях. Це дозволяє транспортному засобу зменшувати кут зламу і вписуватися в порівняно 1 UA 76268 U вузький коридор на проїжджій частині, не заїжджати на тротуари при повороті на поперечні вулиці. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб керування рухом багатоланкового транспортного засобу, що здійснюється за рахунок магнітної головки, яка виконує запис траєкторії ведучої ланки на проїжджій частині, яка містить магнітну речовину і подає інформацію на колеса веденої ланки, який відрізняється тим, що на колесах ведучої ланки встановлені давачі частоти їх обертання, а керування частотою обертання коліс ведених ланок виконується за рахунок регулювання тиску в гальмівних камерах і здійснюється на основі інформації давачів частоти обертання коліс ведучої ланки на блок управління, який регулює тиск в гальмівних камерах коліс ведених ланок таким чином, що при повороті наліво пригальмовуються колеса правого борту, а при повороті направо - колеса лівого борту ведених ланок. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of multilink vehicle motion
Автори англійськоюSakhno Volodymyr Prokhorovych, Poliakov Viktor Mykhailovych, Marchuk Roman Mykolaiovych, Strilets Volodymyr Mykolaiovych, Marchuk Nazar Mykolaiovych
Назва патенту російськоюСпособ управления движением многозвенного транспортного средства
Автори російськоюСахно Владимир Прохорович, Поляков Виктор Михайлович, Марчук Роман Николаевич, Стрилец Владимир Николаевич, Марчук Назар Николаевич
МПК / Мітки
МПК: B62D 13/00
Мітки: транспортного, багатоланкового, спосіб, засобу, керування, рухом
Код посилання
<a href="https://ua.patents.su/4-76268-sposib-keruvannya-rukhom-bagatolankovogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування рухом багатоланкового транспортного засобу</a>
Пристрій для керування рухом транспортного засобу
Номер патенту: 39364
Опубліковано: 25.02.2009
Автори: Сисоєв Олексій Вікторович, Магерамов Лютфалій Курбан-Алієвич, Лізунов Костянтин Михайлович, Бутилін Олександр Анатольович, Корецький Микола Олексійович
МПК: B60D 1/00
Мітки: пристрій, керування, транспортного, засобу, рухом
Формула / Реферат:
Пристрій для керування рухом транспортного засобу, який обладнаний лівою і правою коробками передач (КП), через вихідні вали конструктивно об'єднаних з бортовими передачами, які керуються механіко-гідравлічними приводами для подання масла в порожнини фрикціонів, який відрізняється тим, що на вихідних валах КП встановлені шестірні із зовнішніми зубами, у корпусах задніх фланців КП вбудовані чутливі елементи індукційного датчика частоти...
Спосіб керування поворотом транспортного засобу
Номер патенту: 40814
Опубліковано: 27.04.2009
Автори: Подригало Михайло Абович, Абрамов Дмитро Володимирович, Клец Дмитро Михайлович, Бобошко Олександр Андрійович
МПК: B60T 1/00
Мітки: керування, спосіб, транспортного, поворотом, засобу
Формула / Реферат:
Спосіб керування поворотом транспортного засобу, що включає загальмовування коліс одного борту, який відрізняється тим, що при вході в поворот здійснюють короткочасне загальмовування коліс внутрішнього борту, а при виході з повороту - короткочасне загальмовування коліс зовнішнього (забіжного) борту.
Спосіб автоматичного управління рухом транспортного засобу
Номер патенту: 13290
Опубліковано: 28.02.1997
Автори: Кизима Станіслав Степанович, Павлюк Дмитро Олександрович
МПК: B60T 8/72, G08G 1/052
Мітки: рухом, транспортного, управління, спосіб, автоматичного, засобу
Формула / Реферат:
(57) Способ автоматического управления движением транспортного средства, основанный на определении текущего значения ускорения транспортного средства и формировании управляющего воздействия на органы, связанные с движущим или тормозным приводом, отличающийся тем, что формируют соответствующий текущему значению ускорения транспортного средства сигнал динамической перегрузки, по значению которого осуществляют формирование управляющего...
Спосіб управління рухом транспортного засобу
Номер патенту: 18699
Опубліковано: 25.12.1997
Автори: Саприкін Микола Олександрович, Баліцький Сергій Олександрович, Кизима Станіслав Степанович, Охріменко Володимир Дмитрович, Андреєв Сергій Іванович, Павлюк Дмитро Олександрович
МПК: G08G 1/01
Мітки: управління, спосіб, транспортного, рухом, засобу
Формула / Реферат:
Способ управления движением транспортного средства, основанный на измерении коэффициента сцепления колес с дорогой, вычислении максимально допустимой кинематической характеристики транспортного средства, измерении реальной кинематической характеристики транспортного средства, сравнении реальной и максимально-допустимой кинематических характеристик транспортного средства, изменении параметров движения транспортного средства таким образом,...
Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу
Номер патенту: 11673
Опубліковано: 16.01.2006
Автори: Тимофєєв Віталій Сергійович, Богатиренко Костянтин Іванович, Лавріненко Олександр Сергійович
МПК: B60T 8/88
Мітки: підвищеною, засобу, спосіб, антиблокувального, курсовою, транспортного, гальмуванням, стійкістю, керування
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням транспортного засобу здійснюють шляхом виміру тангенціальної складової сили тертя між гальмовим диском і гальмовою колодкою при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення коліс з дорожнім покриттям, який відрізняється тим, що визначають умови зчеплення кожного колеса (однієї осі) з дорожнім...
Попередній патент: Перетворювач змінної напруги на постійну
Наступний патент: Спосіб стратифікації кардіоваскулярного ризику при неалкогольній жировій хворобі печінки
Випадковий патент: Плунжер для підйому рідини з обводненої газової свердловини