Спосіб автоматичного регулювання параметрів інерційних об’єктів
Формула / Реферат
Спосіб автоматичного регулювання параметрів інерційних об’єктів, що полягає у формуванні основного пропорційно-інтегрального закону регулювання за допомогою нелінійного автоматичного регулятора з гнучким зворотним зв’язком, який відрізняється тим, що на вхід нелінійного автоматичного регулятора при регулюванні спочатку подають сигнал швидкодіючого зворотного зв’язку для забезпечення швидкісної дії регулятора в початковій фазі перехідного процесу, а сигнал другого додаткового інерційного зворотного зв’язку на вхід регулятора подають з запізненням відносно першого швидкодіючого зворотного зв’язку, для забезпечення стійкості системи автоматичного регулювання на заключній стадії перехідного процесу.
Текст
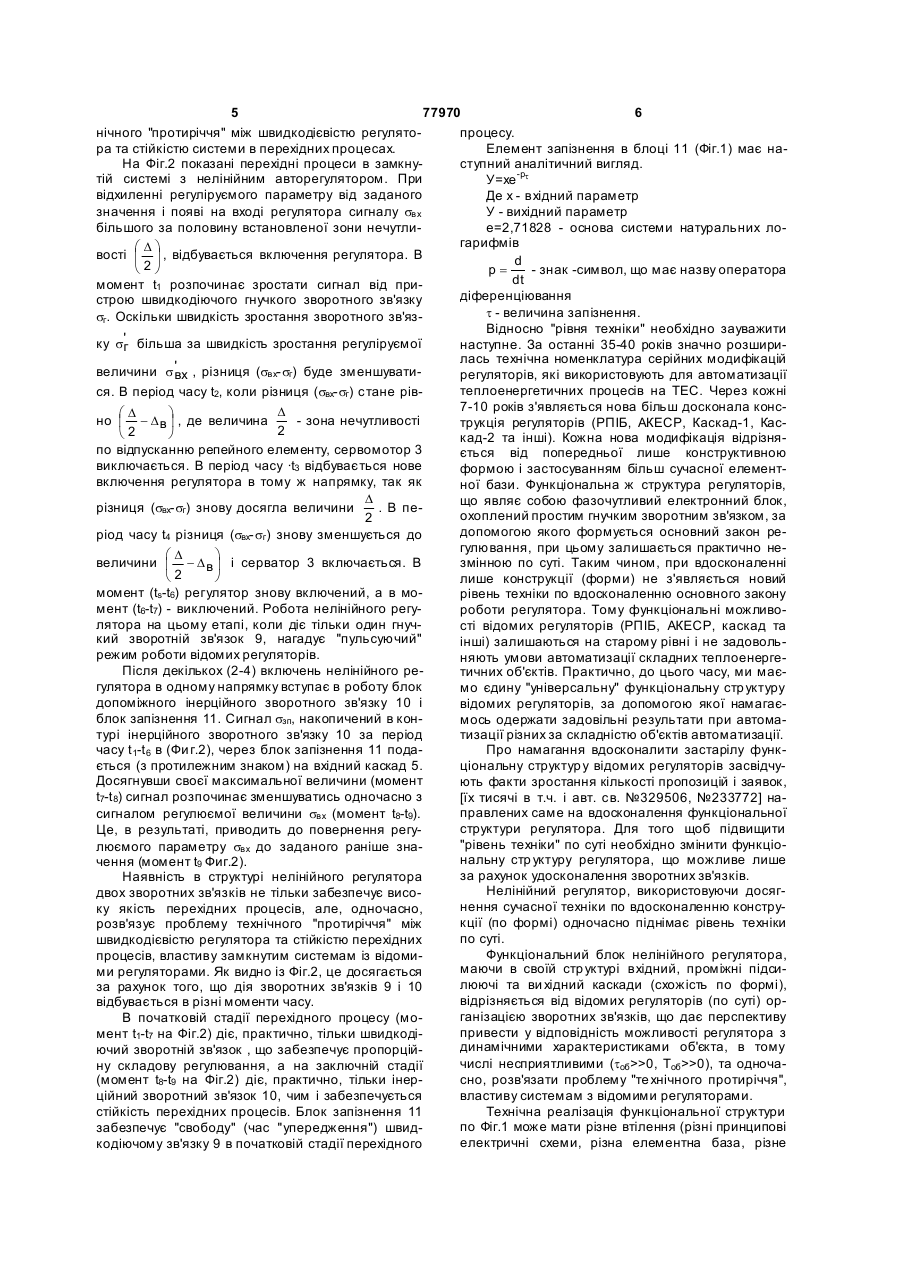
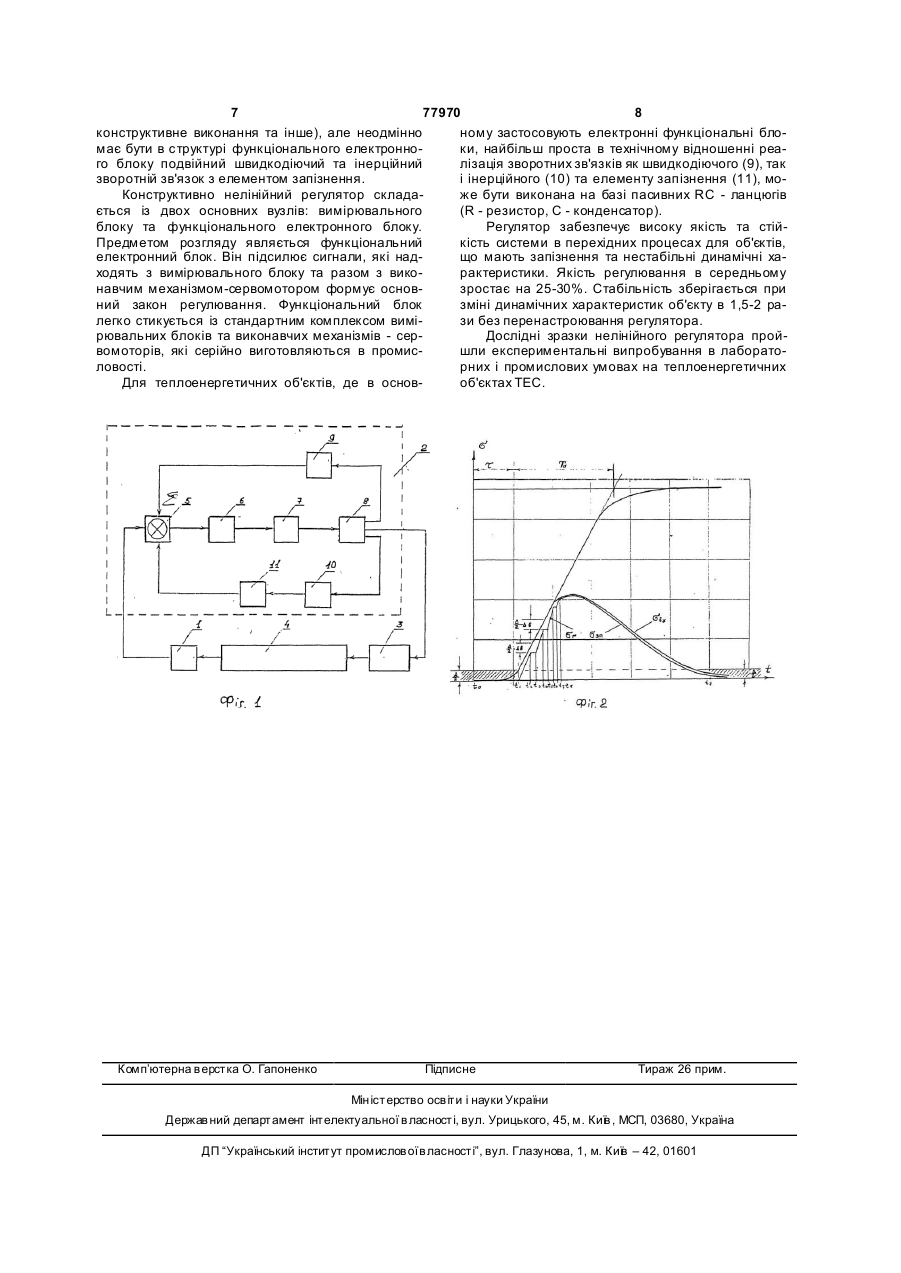
Спосіб автоматичного регулювання параметрів інерційних об’єктів, що полягає у формуванні основного пропорційно-інтегрального закону регу 3 77970 4 гулятори по [авт.свід. №329506] для широкого стосування нелінійного регулятора на різних за вжитку їх при автоматизації теплоенергетичних складністю теплоенергетичних об'єктах. об'єктів ТЕС. Функціональний блок нелінійного регулятора, На Фіг.1 представлена функціональна струкнезважаючи на конструктивну схожість з відомими турна схема нелінійного авторегулятора. На схемі регуляторами по формі (вхідний, проміжні підсипозначено: 1 - вимірювальний блок регулятора, 2 люючі та ви хідний каскади), відрізняється від них фазочутли вий функціональний блок регулятора, 3 (по суті) організацією зворотних зв'язків, що дає - виконавчий механізм - сервомотор, 4 - об'єкт реможливість здійснити принципово новий, більш гулювання. ефективний закон регулювання інерційних теплоФазочутливий функціональний блок 2 містить енергетичних об'єктів на ТЕС. в собі вхідний високоомний сумуючий каскад 5, Таким чином, суть винаходу полягає в тому, з'єднані з ним послідовно проміжні підсилюючі 6 і що нелінійний регулятор містить в собі фазочут7, вихідний каскад 8, блок швидкодіючого гнучкого ливий функціональний блок 2, охоплений подвійзворотного зв'язку 9, блок інерційного гнучкого ним зворотним зв'язком, причому швидкодіючий зворотного зв'язку 10 та блок запізнення 11. зворотний зв'язок 9 вступає в дію в початковій фаНелінійний регулятор відрізняється від відомих зі перехідного процесу, коли тільки починається тим, що в ньому функціональний електронний відхилення регулюємого параметру від заданого блок 2 охоплений подвійним зворотним зв'язком: значення, чим і забезпечується швидкодієвість 1. Швидкодіючим гнучким зворотним зв'язком регулятора на цьому етапі перехідного процесу, а 9. інерційний зворотний зв'язок 10 вступає в дію з 2. Інерційним гнучким зворотним зв'язком 10, деяким часом запізнення ("упередження"), що вищо з'єднаний із блоком запізнення 11. значається блоком запізнення 11, в результаті Відомо, що об'єкти автоматизації поділяються чого і досягається стійкість перехідного процесу на на прості (одноємкісні) і складні (багатоємкісні). До заключній стадії. складних належать такі, що мають запізнення Перший швидкодіючий зв'язок (9) охоплює функціональний блок 2, який містить в собі вхідний (tоб >0) і постійну часу (ТОб >0). каскад 5, та з'єднані з ним послідовно проміжні Проблеми виникають саме при автоматизації складних об'єктів з несприятливими динамічними каскади 6 і 7, а також вихідний каскад 8 з виходу якого подається сигнал в контур цього зв'язку на характеристиками (tоб >>0, Тоб >>0). Відомо такoж, формування швидкодієвості регулятора по перещо регулятори (РПІБ, АКЕСР, каскад, контур та міщенню регуліруючого органу сервомотора 3 в інші), які використовують для автоматизації таких нове положення в залежності від величини і знаку різних за складністю об'єктів, мають в своєму відхилення параметру. складі фазочутливий функціональний електронний Другий зворотний зв'язок (10), на відміну від блок, за допомогою якого формується основний першого (9), являється інерційним зворотним зв'язакон регулювання. Вказані регулятори відрізнязком, що додатково охоплює фазочутливий функються між собою лише конструкцією (формою, ціональний блок 2 з вихідного каскаду якого подаелементною базою та інше) і є такими, що мають ється сигнал в контур інерційного зворотного практично однакову функціональну стр уктур у: вхізв'язку 10. Але сигнал цього зв'язку поступає на дний, проміжні підсилюючі та вихідний каскади, вхідний каскад 5 з деяким часом запізнення ("упеохоплені простим гнучким зворотнім зв'язком з редження"), що формується блоком 11. Таким чивихідного на вхідний каскад регулятора. Така поном, задача інерційного зворотного зв'язку звобудова відомих регуляторів не є досконалою і не диться до забезпечення стійкості перехідного відповідає вимогам автоматизації теплоенергетипроцесу на заключній стадії після того, як уже вичних об'єктів з несприятливими динамічними хараконана необхідна величина регулюючої дії. ктеристиками (tоб >>0, Тоб >>0). Наявність в структурі нелінійного регулятора Проблеми автоматизації таких об'єктів залидвох зворотних зв'язків дає можливість досягти шаються актуальними і без вдосконалення функголовної мети по підвищенню якості регулювання ціональної структури регулятора не можуть бути інерційних об'єктів з запізненням, та одночасно успішно вирішеними. усун ути "те хнічне протиріччя" між швидкодієвістю Відомо, що закон регулювання визначається регулятора та стійкістю системи, завдяки тому, що характером зворотного зв'язку. Для простих об'єкз'являється можливість вирішувати цю проблему тів достатньо застосування відомих регуляторів з по черзі, в різні моменти часу (спочатку - швидкопростим зворотним зв'язком. Для автоматизації дієвість, потім - стійкість) за допомогою двох незаскладних об'єктів (tоб >>0, Тоб >>0) регулятор повилежних зворотних зв'язків і таким чином реалізунен мати більш досконалий зворотний зв'язок, щоб вати лмпщипово новий режим (закон) роботи досягти заданої мети по підвищенню якості перерегулятора. хідних процесів. Така побудова нелінійного регулятора дозвоПрактично склалась ситуація, коли для автоляє збільшити його швидкодієвість в початковій матизації різних за складністю об'єктів існує можфазі перехідного процесу, і тим самим зменшити ливість застосування регуляторів різних за консдинамічну помилку регулювання, а також зберегти трукцією (за формою), але подібних за своїми стійкість замкнутої системи на заключній стадії функціональними можливостями (єдиних за сутперехідного процесу. тю), що не сприяє вирішенню існуючих проблем. Наявність в стр уктурі регулятора дво х зворотУдосконалення функціональної структури за них зв'язків значно розширює його функціональні допомогою нової організації зворотних зв'язків можливості, та одночасно вирішує проблему тех(нова суть) розширює діапазон ефективного за 5 77970 6 нічного "протиріччя" між швидкодієвістю регулятопроцесу. ра та стійкістю системи в перехідних процесах. Елемент запізнення в блоці 11 (Фіг.1) має наНа Фіг.2 показані перехідні процеси в замкнуступний аналітичний вигляд. тій системі з нелінійним авторегулятором. При У=xe-pt відхиленні регуліруємого параметру від заданого Де x - вхідний параметр значення і появі на вході регулятора сигналу sвх У - вихідний параметр більшого за половину встановленої зони нечутлие=2,71828 - основа системи натуральних логарифмів æDö вості ç ÷ , відбувається включення регулятора. В d è2ø p= - знак -символ, що має назву оператора dt момент t1 розпочинає зростати сигнал від придіференціювання строю швидкодіючого гнучкого зворотного зв'язку t - величина запізнення. sг. Оскільки швидкість зростання зворотного зв'язВідносно "рівня техніки" необхідно зауважити ку s'г більша за швидкість зростання регуліруємої наступне. За останні 35-40 років значно розширилась технічна номенклатура серійних модифікацій величини s 'вх , різниця (sвх-sг) буде зменшуватирегуляторів, які використовують для автоматизації теплоенергетичних процесів на ТЕС. Через кожні ся. В період часу t2, коли різниця (sвх-sг) стане рів7-10 років з'являється нова більш досконала консD æD ö но ç - D в ÷ , де величина - зона нечутливості трукція регуляторів (РПІБ, АКЕСР, Каскад-1, Кас2 è2 ø кад-2 та інші). Кожна нова модифікація відрізняпо відпусканню репейного елементу, сервомотор 3 ється від попередньої лише конструктивною виключається. В період часу ·t3 відбувається нове формою і застосуванням більш сучасної елементвключення регулятора в тому ж напрямку, так як ної бази. Функціональна ж структура регуляторів, D що являє собою фазочутливий електронний блок, різниця (sвх-sг) знову досягла величини . В пеохоплений простим гнучким зворотним зв'язком, за 2 допомогою якого формується основний закон реріод часу t4 різниця (sвх-sг) знову зменшується до гулювання, при цьому залишається практично неæD ö величини ç - D в ÷ і серватор 3 включається. В змінною по суті. Таким чином, при вдосконаленні è2 ø лише конструкції (форми) не з'являється новий момент (ts-t6) регулятор знову включений, а в морівень техніки по вдосконаленню основного закону мент (t6-t7) - виключений. Робота нелінійного регуроботи регулятора. Тому функціональні можливолятора на цьому етапі, коли діє тільки один гнучсті відомих регуляторів (РПІБ, АКЕСР, каскад та кий зворотній зв'язок 9, нагадує "пульсуючий" інші) залишаються на старому рівні і не задовольрежим роботи відомих регуляторів. няють умови автоматизації складних теплоенергеПісля декількох (2-4) включень нелінійного ретичних об'єктів. Практично, до цього часу, ми маєгулятора в одному напрямку вступає в роботу блок мо єдину "універсальну" функціональну стр уктуру допоміжного інерційного зворотного зв'язку 10 і відомих регуляторів, за допомогою якої намагаєблок запізнення 11. Сигнал sзп, накопичений в конмось одержати задовільні результати при автоматурі інерційного зворотного зв'язку 10 за період тизації різних за складністю об'єктів автоматизації. часу t 1-t 6 в (Фи г.2), через блок запізнення 11 подаПро намагання вдосконалити застарілу функється (з протилежним знаком) на вхідний каскад 5. ціональну структур у відомих регуляторів засвідчуДосягнувши своєї максимальної величини (момент ють факти зростання кількості пропозицій і заявок, t7-t 8) сигнал розпочинає зменшуватись одночасно з [їх тисячі в т.ч. і авт. св. №329506, №233772] направлених саме на вдосконалення функціональної сигналом регулюємої величини sвх (момент t8-t9). структури регулятора. Для того щоб підвищити Це, в результаті, приводить до повернення регу"рівень техніки" по суті необхідно змінити функціолюємого параметру sвх до заданого раніше знанальну стр уктуру регулятора, що можливе лише чення (момент t9 Фиг.2). за рахунок удосконалення зворотних зв'язків. Наявність в структурі нелінійного регулятора Нелінійний регулятор, використовуючи досягдвох зворотних зв'язків не тільки забезпечує висонення сучасної техніки по вдосконаленню конструку якість перехідних процесів, але, одночасно, кції (по формі) одночасно піднімає рівень техніки розв'язує проблему технічного "протиріччя" між по суті. швидкодієвістю регулятора та стійкістю перехідних Функціональний блок нелінійного регулятора, процесів, властиву замкнутим системам із відомимаючи в своїй стр уктурі вхідний, проміжні підсими регуляторами. Як видно із Фіг.2, це досягається люючі та ви хідний каскади (схожість по формі), за рахунок того, що дія зворотних зв'язків 9 і 10 відрізняється від відомих регуляторів (по суті) орвідбувається в різні моменти часу. ганізацією зворотних зв'язків, що дає перспективу В початковій стадії перехідного процесу (мопривести у відповідність можливості регулятора з мент t1-t7 на Фiг.2) діє, практично, тільки швидкодідинамічними характеристиками об'єкта, в тому ючий зворотній зв'язок , що забезпечує пропорційчислі несприятливими (tоб >>0, Тоб >>0), та одночану складову регулювання, а на заключній стадії (момент t8-t9 на Фіг.2) діє, практично, тільки інерсно, розв'язати проблему "те хнічного протиріччя", ційний зворотний зв'язок 10, чим і забезпечується властиву системам з відомими регуляторами. стійкість перехідних процесів. Блок запізнення 11 Технічна реалізація функціональної структури по Фіг.1 може мати різне втілення (різні принципові забезпечує "свободу" (час "упередження") швиделектричні схеми, різна елементна база, різне кодіючому зв'язку 9 в початковій стадії перехідного 7 77970 8 конструктивне виконання та інше), але неодмінно ному застосовують електронні функціональні бломає бути в структурі функціонального електронноки, найбільш проста в технічному відношенні реаго блоку подвійний швидкодіючий та інерційний лізація зворотних зв'язків як швидкодіючого (9), так зворотній зв'язок з елементом запізнення. і інерційного (10) та елементу запізнення (11), моКонструктивно нелінійний регулятор складаже бути виконана на базі пасивних RC - ланцюгів ється із двох основних вузлів: вимірювального (R - резистор, С - конденсатор). блоку та функціонального електронного блоку. Регулятор забезпечує високу якість та стійПредметом розгляду являється функціональний кість системи в перехідних процесах для об'єктів, електронний блок. Він підсилює сигнали, які надщо мають запізнення та нестабільні динамічні хаходять з вимірювального блоку та разом з викорактеристики. Якість регулювання в середньому навчим механізмом-сервомотором формує основзростає на 25-30%. Стабільність зберігається при ний закон регулювання. Функціональний блок зміні динамічних характеристик об'єкту в 1,5-2 ралегко стикується із стандартним комплексом вимізи без перенастроювання регулятора. рювальних блоків та виконавчих механізмів - серДослідні зразки нелінійного регулятора пройвомоторів, які серійно виготовляються в промисшли експериментальні випробування в лаборатоловості. рних і промислових умовах на теплоенергетичних Для теплоенергетичних об'єктів, де в основоб'єктах ТЕС. Комп’ютерна в ерстка О. Гапоненко Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatically controlling the parameters of an inertial object
Автори англійськоюKonovalov Ihor Mykhailovych, Konovalov Mykhailo Andriiovych
Назва патенту російськоюСпособ автоматического регулирования параметров инерционного объекта
Автори російськоюКоновалов Михаил Андреевич
МПК / Мітки
МПК: G05B 11/36, G05B 13/00
Мітки: параметрів, регулювання, спосіб, об'єктів, автоматичного, інерційних
Код посилання
<a href="https://ua.patents.su/4-77970-sposib-avtomatichnogo-regulyuvannya-parametriv-inercijjnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання параметрів інерційних об’єктів</a>
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Дубровний Віктор Опанасович, Шевченко Костянтин Леонідович, Скрипник Юрій Олексійович
МПК: G05B 23/00
Мітки: визначення, автоматичного, процесів, спосіб, похибок, регулювання, датчиків, параметрів, систем, здійснення, пристрій, технологічних
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів чи виробів (парс-тп) та спосіб такого регулювання
Номер патенту: 34060
Опубліковано: 15.04.2003
Автори: Русінковський Олег Юрійович, Костогриз Петро Васильович, Костогриз Кирило Петрович
МПК: F26B 3/02, F26B 21/06, F26B 25/22
Мітки: матеріалів, прогартовування, парс-тп, спосіб, виробів, пристрій, сушіння, автоматичного, регулювання, процесу, такого
Формула / Реферат:
1. Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів або виробів у сушильному агрегаті, що містить вимірювальні пристрої, кожен з яких виконаний у вигляді, принаймні одного датчика, з’єднаного з елементом порівняння, блок керування, із входами якого з’єднані вимірювальні пристрої, а вихід якого зв'язаний з виконавчим механізмом регулювального органа подачі палива у камеру спалювання, при цьому датчик першого...
Спосіб автоматичного регулювання тиску перегрітої пари в багатопаливному парогенераторі
Номер патенту: 68315
Опубліковано: 15.07.2004
Автори: Романенко Володимир Ілліч, Ястреб Микола Миколайович, Волков Володимир Пилипович, Дудков Олександр Юрійович, Кекух Анатолій Володимирович, Шеремет Володимир Олександрович, Шуліченко Юрій Костянтинович, Сокуренко Анатолій Валентинович
МПК: F23N 1/00, F22B 35/00
Мітки: спосіб, багатопаливному, автоматичного, регулювання, перегрітої, пари, тиску, парогенераторі
Формула / Реферат:
Спосіб автоматичного регулювання тиску перегрітої пари в багатопаливному парогенераторі, що працює в режимі буферного споживання газоподібного палива, шляхом виміру витрати усіх видів палива і величин відхилень від заданих значень тиску перегрітої пари й сигналу по теплу та наступної зміни витрати регульованого виду палива залежно від динамічно перетвореної суми обмірюваних величин відхилень і сигналу зворотного зв`язку, який відрізняється...
Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Мамонов Анатолій Васильович, Загарій Генадій Іванович, Гусєв Павло Вікторович, Гусєв Ігор Вікторович, Ситник Борис Тимофійович, Левочко Борис Степанович
МПК: G05B 23/02
Мітки: ланок, інерційних, пристрій, вимірювання, параметрів
Формула / Реферат:
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом...
Система автоматичного регулювання процесу сушіння деревини з врахуванням її фізико-механічного стану
Номер патенту: 23818
Опубліковано: 16.06.1998
Автори: Соколовський Ярослав Іванович, Сафаров Вячеслав Олександрович, Книш Юрій Вікторович
МПК: F26B 25/22
Мітки: автоматичного, деревини, процесу, врахуванням, стану, фізико-механічного, сушіння, регулювання, система
Формула / Реферат:
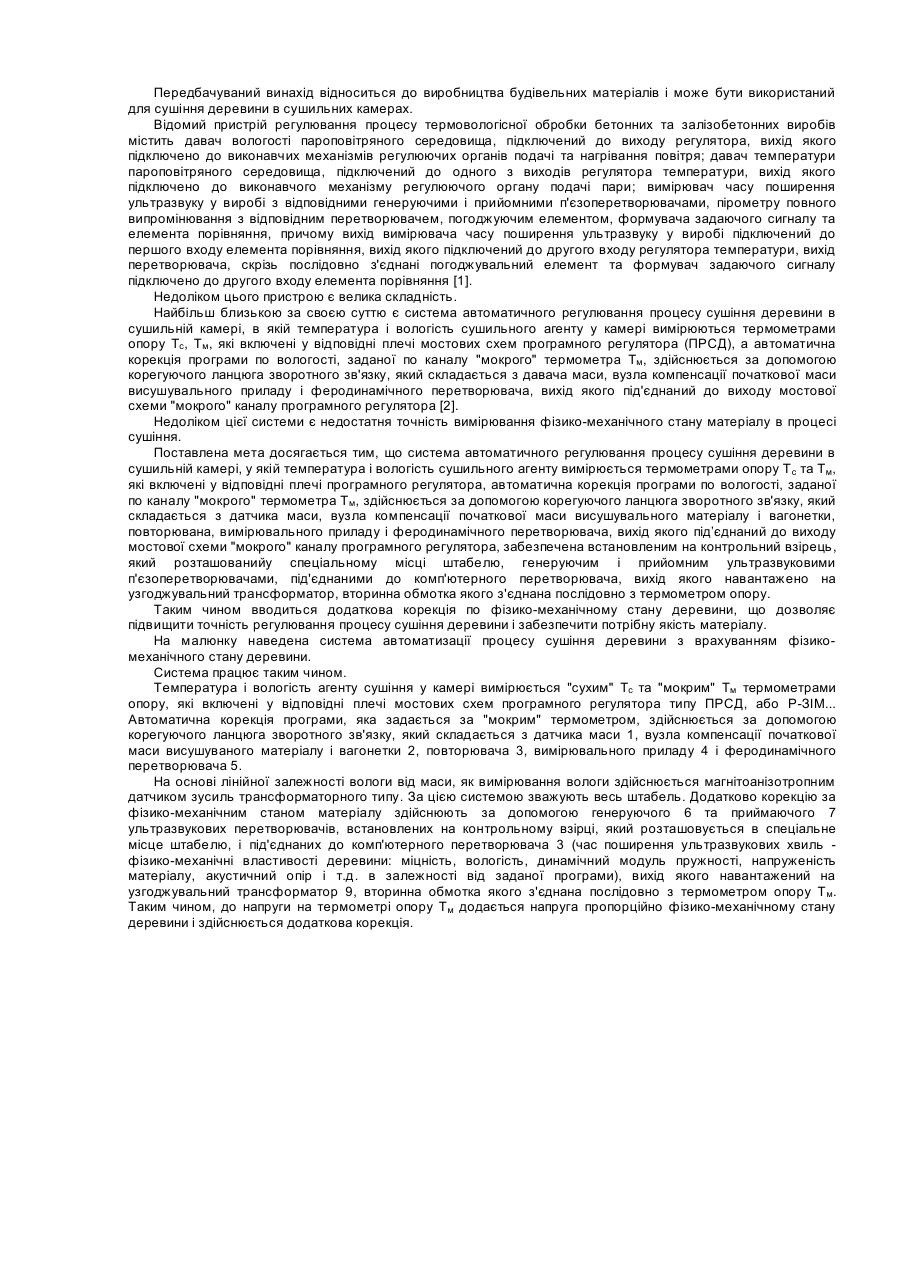
Система автоматичного регулювання процесу сушіння деревини з врахуванням її фізико-механічного стану у сушильній камері, в яких температура і вологість агенту сушіння у камері вимірюється термометрами опору Тс, Тм, які включені у відповідні плечі мостових схем програмного регулятора, а автоматична корекція програм по вологості, що задається по каналу "мокрого" термометру Тм, здійснюється за допомогою корегуючого ланцюга зворотного...
Попередній патент: Пристрій для одержання вуглецевого наноструктурного матеріалу
Наступний патент: Вставка для виливниці
Випадковий патент: Спосіб протезування повними знімними пластинковими протезами