Пристрій для керування переміщенням піднімальної посудини в шахтному стволі
Номер патенту: 78348
Опубліковано: 15.03.2007
Автори: Мялковський Валентин Йосипович, Грядущий Борис Абрамович, Чехлатий Андрій Миколайович, Дворников Володимир Іванович, Чехлатий Микола Олександрович
Формула / Реферат
Пристрій для керування переміщенням піднімальної посудини в шахтному стволі, до складу якого входять датчик навантаження, датчик шляхових імпульсів і регулятор тиску механізму гальма, який відрізняється тим, що в нього введені мікропроцесор, дешифратор, адресні входи якого з'єднані з адресними виходами мікропроцесора, перший інформаційний вихід останнього з'єднаний з регулятором тиску механізму гальма, другий - із блоком керування посадковим пристроєм, третій - з лінією переміщення "Назад", четвертий - з лінією переміщення "Вперед", п'ятий - із запобіжним гальмом, а інформаційний вхід - з виходом датчика шляхових імпульсів, аналого-цифровий перетворювач, перший вхід якого з'єднаний із блоком задання швидкості, другий - з датчиком навантаження, перший і другий адресні входи з'єднані з відповідними виходами дешифратора, а вихід підключений до шини даних мікропроцесора, два кінцеві вимикачі, М блоків контролю по числу горизонтів, кожен із яких має наступні підключення: адресний вхід з'єднаний з відповідним виходом дешифратора, перший і другий входи з'єднані відповідно із шинами В і Н командоапарата, третій і четвертий входи - з першим і другим датчиками початку уповільнення, п'ятий і шостий входи - з датчиком і задавачем зупинки першого поверху, сьомий і восьмий входи з'єднані відповідно з датчиком і задавачем зупинки другого поверху, дев'ятий вхід з'єднаний з датчиком наявності кулаків, десятий - із задавачем зупинки на горизонті, причому на першому горизонті замість першого датчика початку уповільнення включений перший кінцевий вимикач, а на М горизонті замість другого датчика початку уповільнення включений другий кінцевий вимикач, до складу кожного блока контролю входить регістр, інформаційний вихід якого є інформаційним виходом блока контролю і підключений до шини даних мікропроцесора, а перший, другий, третій і четвертий входи регістра є відповідними входами блока контролю, та три елементи І, перший і другий входи першого елемента І є відповідно п'ятим і шостим входами блока контролю, а вихід з'єднаний з п'ятим входом регістра, перший і другий входи другого елемента І є відповідно сьомим і восьмим входами блока контролю, а вихід з'єднаний із шостим входом регістра, перший вхід третього елемента І є десятим входом блока контролю, другий вхід з'єднаний з адресним входом блока контролю, а вихід - із входом "Зчитування даних" регістра.
Текст
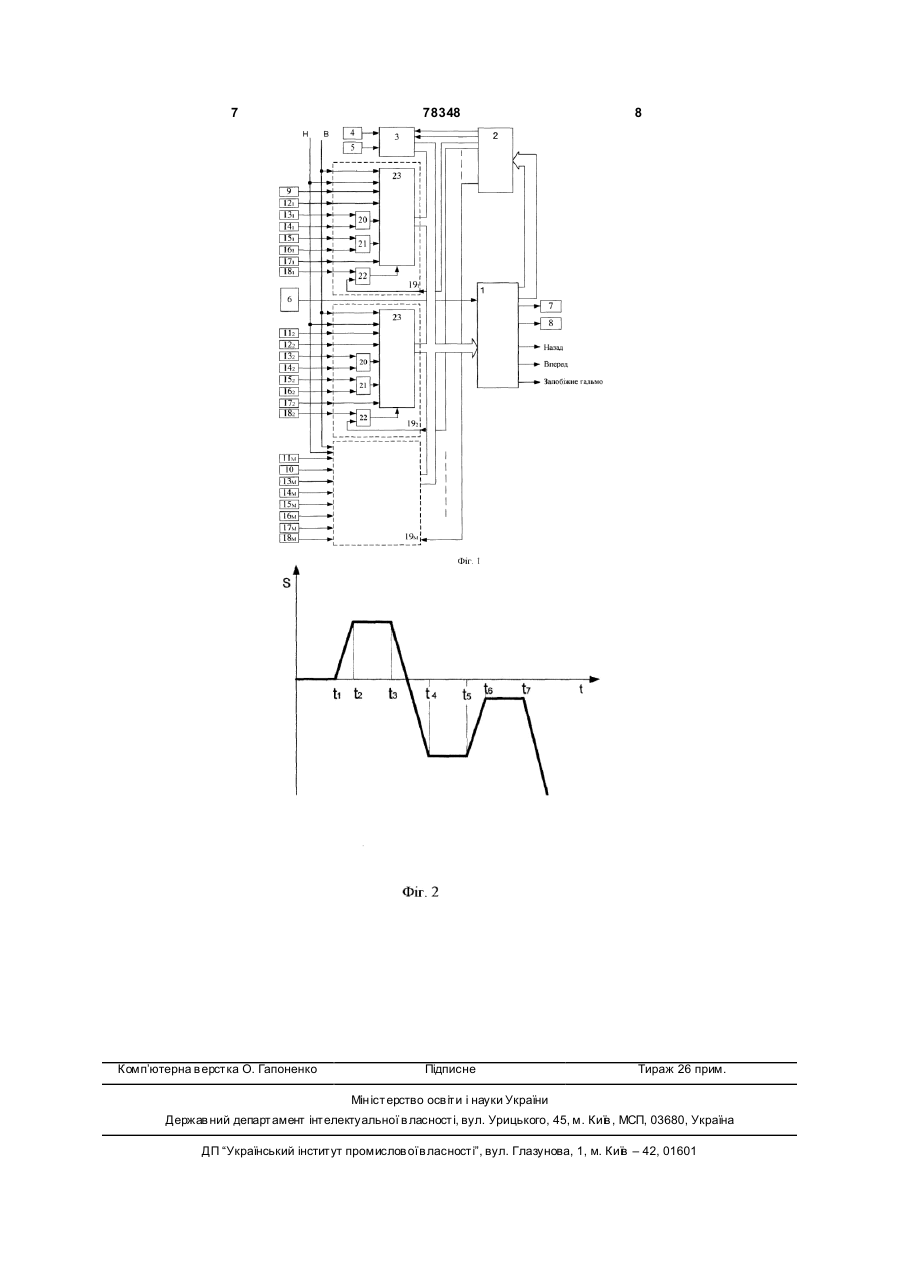
Пристрій для керування переміщенням піднімальної посудини в шахтному стволі, до складу якого входять датчик навантаження, датчик шляхови х імпульсів і регулятор тиску механізму гальма, який відрізняється тим, що в нього введені мікропроцесор, дешифратор, адресні входи якого з'єднані з адресними виходами мікропроцесора, перший інформаційний вихід останнього з'єднаний з регулятором тиску механізму гальма, другий - із блоком керування посадковим пристроєм, третій - з лінією переміщення "Назад", четвертий - з лінією переміщення "Вперед", п'ятий - із запобіжним гальмом, а інформаційний вхід - з виходом датчика шляхови х імпульсів, аналогоцифровий перетворювач, перший вхід якого з'єднаний із блоком задання швидкості, другий - з датчиком навантаження, перший і другий адресні C2 2 (19) 1 3 78348 4 При роботі цього пристрою формується напрувходами блоку контролю, а вихід з'єднаний із шосга, пропорційна вазі посудини для керування регутим входом регістра, перший вхід третього елемелятором тиску, що забезпечує створення гальмонта І є десятим входом блоку контролю, другий вого моменту. Однак, у пристрої не враховується вхід з'єднаний з адресним входом блоку контролю, поточна швидкість і місце розташування піднімаа вихід - із входом «Зчитування даних» регістра. льної посудини, що може привести до передчасної Введення мікропроцесора, блоку контролю, його зупинки. датчиків першого і другого поверху, аналогоКрім того, у пристрої присутнє RC - коло, яке цифрового перетворювача вигідно відрізняє зазатягує час заряду й розряду в залежності від пропонований пристрій від прототипу, оскільки умов експлуатації. знижується помилка, обумовлена впливом наванДо недоліку пристрою варто також віднести таження, поточної швидкості і місця розташування неможливість автоматичного керування перемікліті на точність підходу посудини до пункту зупинщенням піднімальної посудини в шахтному стволі. ки і, як результат, виключається можливість тверЗадачею винаходу є забезпечення необхідних дої посадки кліті на кулаки. маневрів при завантаженні і розвантаженні двопоКрім того, заявлений пристрій дозволяє автоверхової кліті шляхом регулювання напрямку й матично формувати команди, згідно яких можна швидкості переміщення піднімальної посудини забрати або установити кулаки. Таке рішення запоблизу прийомної площадки. безпечує аварійну зупинку на горизонтах без устаЦе дозволяє підвищити продуктивність і безновки кулаків. пеку експлуатації піднімальної машини. На Фіг.1 зображений пристрій для керування Поставлена задача досягається тим, що в переміщенням піднімальної посудини в шахтному пристрої для керування переміщенням піднімальстволі. ної посудини в ша хтному стволі, що містить датчик Пристрій для керування переміщенням піднінавантаження, датчик шляхових імпульсів і регумальної посудини в шахтному стволі містить міклятор тиску механізму гальма відповідно до винаропроцесор 1, дешифратор 2, аналого-цифровий ходу в нього введені мікропроцесор, дешифратор, перетворювач 3, блок завдання швидкості 4, датадресні входи якого з'єднані з адресними виходачик навантаження 5, датчик шляхових імпульсів 6, ми мікропроцесора, перший інформаційний вихід регулятор тиску механізму гальма 7, блок керуостаннього з'єднаний з регулятором тиску механівання посадковим пристроєм 8, кінцеві вимикачі 9, зму гальма, другий - із блоком керування посадко10, датчики початку уповільнення 112...11М, вим пристроєм, третій - з лінією переміщення «На121...12М-1, датчик 131...13М зупинки першого повезад», четвертий - з лінією переміщення «Вперед», рху, задавач 141...14М зупинки першого поверху, п'ятий - із запобіжним гальмом, а інформаційний датчик 151...15М зупинки другого поверху, задавач вхід - з ви ходом датчика шляхових імпульсів, ана161...16М зупинки другого поверху, датчик 171...17М лого-цифровий перетворювач, перший вхід якого наявності кулаків, задавач 181...18М зупинки на з'єднаний із блоком завдання швидкості, другий - з горизонти, блок контролю 191...19М до складу кождатчиком навантаження, перший і другий адресні ного блоку входять елементи 120, 121, 122, ревходи з'єднані з відповідним виходом дешифратогістр 23. ра, а вихід підключений до шини даних мікропроПристрій працює так. цесора, два кінцеві вимикачі, М-блоків контролю У вихідному стані мікропроцесор 1 приймає по числу горизонтів, кожен блок контролю має насигнали від датчика шляху 6 і формує двоїчний ступні підключення, адресний вхід з'єднаний з відкод, що надходить на дешифратор 2, де перетвоповідним виходом дешифратора, перший і другий рюється в позиційний код. По сигналах від датчика входи з'єднані відповідно із шинами В и Η команшляху 6 у мікропроцесорі 1 обчислюється швиддоапарата, третій і четвертий входи - з першим і кість і поточне положення піднімальної посудини другим датчиком початку уповільнення, п'ятий і (кліті). Застосовуваний дешифратор 2 по команді шостий входи - з да тчиком і задавачем зупинки мікропроцесора 1 забезпечує підключення до шипершого поверху, сьомий і восьмий входи - з'єднани даних (ШД) обраного блоку контролю 191...19M ні відповідно з датчиком і задавачем зупинки друабо аналого-цифрового перетворювача 3. Так, з гого поверху, дев'ятий вхід з'єднаний з датчиком появою сигналу з першого або другого ви ходу денаявності кулаків, десятий - із задавачем зупинки шифратора 2, установлюється відповідний зв'язок на горизонті, причому на першому горизонті задатчика навантаження 5 або блоку завдання мість першого датчика початку уповільнення швидкості 4 через аналого-цифровий перетворювключений перший кінцевий вимикач, а на Мвач 3 з мікропроцесором 1. Наступні виходи дегоризонті замість другого датчика початку уповільшифратора 2 з'єднують відповідні блоки контролю нення включений другий кінцевий вимикач, до 191...19М з мікропроцесором 1. Блоки контролю складу кожного блоку контролю входить регістр, 191...19М призначені для збору інформації про стан інформаційний вихід якого є інформаційним вихооб'єктів контролю на відповідному горизонті дом блоку контролю і підключений до шини даних №1...№М. мікропроцесора, перший, другий, третій і четверРозглянемо роботу пристрою з зупинками на тий входи регістра є відповідними входами блоку горизонти №2 і №М. Допустимо, що кліть двоповеконтролю, та три елементи І, перший і другий вхорхова і переміщається вниз. На шині В (Вперед) ди першого елемента І є відповідно п'ятим і шоскомандоапарата є присутнім сигнал логічної «1», тим входами блоку контролю, а вихід з'єднаний з що надходить на перші входи блоків контролю п'ятим входом регістра, перший і другий входи 191...19М. Задавачі зупинки 182, 18М на горизонтах другого елемента І є відповідно сьомим і восьмим №2 і №М включені, і сигнал із їхніх виходів надхо 5 78348 6 дить на перші входи відповідних елементів И22. З наявності команди «Зупинка» на першому горизоадресного виходу мікропроцесора 1 на дешифранти мікропроцесор 1 розгальмовує машину, фортор 2 надходить двоїчний код циклічного опитумує команду «Назад» і «Забрати кулаки». По ковання блоків контролю 191...19М. З дешифратора 2 манді «Назад» на шині Η командоапарата на другий вхід елемента И22 надходить сигнал з'явиться сигнал логічної «1», що надходить на «Зчитування даних», по якому вихід регістра 23 другі входи блоків контролю 191...19М. При перепідключається до шини даних. При проходженні міщенні посудини нагору сигнали з виходу датчикліті датчика початок уповільнення 112 сигнал із ків, установлених на горизонти 1, через регістр 23 його виходу через регістр 23 надходить по шині по шині даних надходять на мікропроцесор 1. При даних на вхід мікропроцесора 1. Останній порівпроходженні посудиною датчика початку уповільнює швидкість руху посудини зі швидкістю, що нення 121 мікропроцесор 1 формує сигнал керунадходить із блоку завдання швидкості 4 і з урахування регулятором тиску механізму гальма 7, виванням навантаження на двигун піднімальної макликаючи створення гальмового моменту з шини формує сигнал керування регулятором тиску урахуванням даного датчика навантаження 5 і механізму гальма 7, викликаючи створення гальблоку завдання швидкості 4. У результаті швидмового моменту двигуна піднімальної машини. У кість руху кліті починає знижуватися. Темп знирезультаті швидкість руху піднімальної посудини ження швидкості руху кліті визначається блоком знижується. Подальше коректування руху піднімазавдання швидкості 4 із частотою надходження льної посудини здійснюється з періодом прохоімпульсів від датчика шляху 6. При наявності сигдження сигналів від датчика шляху 6. При надхоналів від задавача 161 зупинки другого поверху й дженні сигналу з датчика 132 зупинки першого сигналу від датчика 151 зупинки другого поверху поверху й наявності відповідного сигналу задавача мікропроцесор 1 формує команду керування регу142 зупинки першого поверху спрацьовує елемент лятором тиску механізму гальма 7 піднімальної І20. Сигнал із виходу елемента І20 через регістр машини, викликаючи створення гальмового моме23 надходить у мікропроцесор 1, що знімає команнту й установку кліті на кулаки. Після зняття сигду «Вперед» і подає команду в блок керування налу задавача 161 зупинки другого поверху мікропосадковим пристроєм 8, останній формує команпроцесор 1 формує команду «Назад», піднімаючи ду установки посудини на посадковий пристрій кліть над посадковим пристроєм. Сигнал із виходу (кулаки). На Фіг.2 представлена діаграма перемідатчика шляхи 6 надходить на мікропроцесор 1, щення (S) посудини в залежності від часу (t) на що зупиняє піднімальну машину і формує команду горизонті 2. При знятті сигналу задавача 142 зупи«Забрати кулаки». При надходженні сигналу з датнки першого поверху мікропроцесор 1 розгальмочика 171 «Кулаки прибрані», мікропроцесор 1 розвує машину і формує команду «Назад», унаслідок гальмовує машину і формує команду «Назад». цього піднімальна машина за час t2-t1 піднімає При надходженні сигналів від датчика 131 зупинки кліть над посадковим пристроєм. Сигнал з виходу першого поверху й сигналу «Кулаки прибрані», при датчика шляху 6 надходить на мікропроцесор 1, наявності команди сигналу від задавача 141 зупинщо зупиняє піднімальну машину і формує команду ки першого поверху мікропроцесор 1 формує ков блок керування посадковим пристроєм 8, по якій манду керування регулятором тиску механізму убираються кулаки (Фіг.2, момент t3). При надхогальма 7 піднімальної машини на її зупинку. Кінцедженні сигналу з датчика 172 кулаки прибрані, міквий вимикач 9 призначений для включення запоропроцесор 1 формує команду «Вперед». У ребіжного гальма при підйомі посудини на 0,5м вище зультаті кліть переміщається вниз до надходження рівня верхньої площадки, а кінцевий вимикач 10 сигналу від датчика 152. Зупинки другого поверху включає запобіжне гальмо при спуску піднімальної (Фіг.2 момент t4). При наявності сигналу задавача посудини нижче горизонту М. 162 зупинки другого поверху, включає елемент Таким чином, запропонований пристрій виИ21. Сигнал із виходу елемента И21 через регістр ключає можливість твердої посадки кліті на кулаки 23 надходить на мікропроцесор 1, що формує коза рахунок точного підходу посудини до пункту манду установки кліті на кулаки. При знятті сигназупинки, дозволяє підвищити надійність і продуклу задавача 162 другого поверху мікропроцесор 1 тивність піднімальних машин, значно збільшити розгальмовує машину, формує команду «Назад» можливість автоматичного керування режимами (Фіг.2, момент t5). Сигнал з виходу датчика шляху їхньої роботи. 6 надходить на мікропроцесор 1, що зупиняє підВ даний час в інституті розроблений і виготовнімальну машину (Фіг.2 момент t6) і формує колений експериментальний зразок пристрою для манду забрати кулаки. При надходженні сигналу керування переміщенням піднімальної посудини в «Кулаки прибрані» (Фіг.2 момент t7) мікропроцесор шахтному стволі. По результатами випробувань 1 розгальмовує машину і формує команду «Впеприйнято рішення про виготовлення дослідної ред». Посудина починає рух униз із швидкістю партії пристрою. обумовленою блоком завдання швидкості 4. При Джерела інформації проходженні посудиною датчика початок уповіль1. А.С. СССР №1778058 Устройство для пуска нення 11М мікропроцесор 1 формує команди керуподъемной машины МПК5 В66В1/28, Опубл. вання для горизонту Μ аналогічні командам для 30.11.92. Бюл. №44. горизонту 2. Після зняття сигналу задавач 16М 2. А.С. СССР №583072 Устройство для регулирозупинки другого поверху мікропроцесор 1 здійснює вания скорости перемещения шахтной подъемной опитування задавачів 181...18М на наявність запиту клети при посадке на жесткое посадочное устройзупинки посудини на відповідному горизонті. При ство МПК В66В1/32, Опубл. 05.12.77. Бюл. №45. 7 Комп’ютерна в ерстка О. Гапоненко 78348 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of displacement of lift vessel in pit-shaft
Автори англійськоюHriaduschyi Borys Abramovych, Mialkovskyi Valentyn Yosypovych, Dvornykov Volodymyr Ivanovych, Chekhlatyi Andrii Mykolaiovych, Chekhlatyi Mykola Oleksandrovych
Назва патенту російськоюУстройство для управления перемещением подъемного сосуда в шахтном стволе
Автори російськоюГрядущий Борис Абрамович, Мялковский Валентин Иосифович, Дворников Владимир Иванович, Чехлатый Андрей Николаевич, Чехлатый Николай Александрович
МПК / Мітки
МПК: B66B 1/28
Мітки: посудини, шахтному, стволі, переміщенням, керування, піднімальної, пристрій
Код посилання
<a href="https://ua.patents.su/4-78348-pristrijj-dlya-keruvannya-peremishhennyam-pidnimalno-posudini-v-shakhtnomu-stvoli.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування переміщенням піднімальної посудини в шахтному стволі</a>
Пристрій захисту від напуску каната при застряванні підіймальної посудини у стволі
Номер патенту: 26573
Опубліковано: 11.10.1999
Автори: Матвієнко Микола Павлович, Прохоренко Вадим Олександрович
МПК: B66B 5/12
Мітки: каната, підіймальної, стволі, захисту, застряванні, напуску, посудини, пристрій
Формула / Реферат:
Устройство защиты от напуска каната при застревании подъемного сосуда в стволе, содержащее квантовые генераторы, расположенные на копре, усилители-формирователи, счетчики импульсов и исполнительный орган, отличающееся тем, что в него введены дифференцирующие элементы, при этом выход первого квантового генератора через первый усилитель-формирователь соединен со счетным входом первого счетчика и первым дифференцирующим элементом, выход которого...
Пристрій керування переміщенням дверей
Номер патенту: 1762
Опубліковано: 25.10.1994
Автори: Лукавий Роман Мирославович, Кондратик Володимир Васильович
МПК: G05B 19/19
Мітки: керування, пристрій, дверей, переміщенням
Формула / Реферат:
Устройство управления перемещением дверей, содержащее установленные в зоне движения дверей датчики контроля движущегося объекта и датчики контроля скорости движения дверей, соединенные выходами с входами блока формирования управляющих сигналов, связанного выходами через блок управления электроприводом с электроприводом, кинематически соединенным с дверями, отличающееся тем, что оно снабжено блоком контроля порогового значения скорости...
Пристрій керування

Номер патенту: 65665
Опубліковано: 15.04.2004
Автори: Маранов Олександр Вікторович, Чигирин Олег Трохимович, Чигирин Юрій Трохимович
МПК: G06F 11/00
Формула / Реферат:
Пристрій керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом пристрою керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Пристрій керування двокоординатним переміщенням для кроїльного комплексу
Номер патенту: 17798
Опубліковано: 16.10.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Коляда Ірина Володимирівна
МПК: G05D 19/00
Мітки: кроїльного, комплексу, пристрій, переміщенням, двокоординатним, керування
Формула / Реферат:
Пристрій керування двокоординатним переміщенням для кроїльного комплексу, що містить два крокових двигуни та обчислювач, який відрізняється тим, що в нього введені чотири мостових драйвери, входами яких є виходи мікропроцесора, їх виходи з'єднані з обмотками крокових двигунів, а на виході двигунів розміщені оптронні датчики.
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу
Номер патенту: 15807
Опубліковано: 17.07.2006
Автори: Паламарчук Дмитро Анатолійович, Почка Костянтин Іванович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 19/00
Мітки: пристрій, зміною, переміщенням, вильоту, стріли, вантажу, країні, керування, горизонтальним
Формула / Реферат:
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, з механізмом зміни вильоту, який відрізняється тим, що містить шарнірно закріплений до стріли гідроциліндр двосторонньої дії з дросельним регулюванням швидкості переміщення робочої рідини з безштокової у штокову порожнини гідроциліндра при можливості зміни...
Попередній патент: Аерозондний пристрій для спуску людей із висотних споруд
Наступний патент: Селекційна молотарка вібраційного типу смвт-1
Випадковий патент: Спосіб виробництва мінерально-волоконного виробу і суцільноскладений мінерально-волоконний виріб