Спосіб зміни вильоту стріли портального крана та пристрій для його здійснення
Номер патенту: 82041
Опубліковано: 25.02.2008
Автори: Міхєєв Володимир Авдійович, Гусев Юрій Борисович, Гонтарев Олександр Стефанович
Формула / Реферат
1. Спосіб зміни вильоту стріли портального крана шляхом перетворення обертання вихідного вала електропривода механізму зміни вильоту стріли на прямолінійне переміщення зубчатої рейки, з наступним перетворенням прямолінійного переміщення рейки на поворотне переміщення стріли, який відрізняється тим, що при досягненні в рейці зусилля, що відповідає 0,64-0,67 потужності, споживаної механізмом зміни вильоту стріли, за сигналом командоконтролера, що програмується, на частотний перетворювач автоматично знижують кутову швидкість електропривода до досягнення максимально припустимого зусилля в рейці, після чого припиняють знижувати кутову швидкість двигуна.
2. Пристрій для зміни вильоту стріли портального крана, що містить електропривод, вихідний вал якого взаємозв'язаний із зубчатою рейкою, яка взаємозв'язана зі стрілою крана, який відрізняється тим, що зубчата рейка обладнана командоконтролером, що програмується, який з'єднаний з частотним перетворювачем, підключеним до електропривода.
Текст
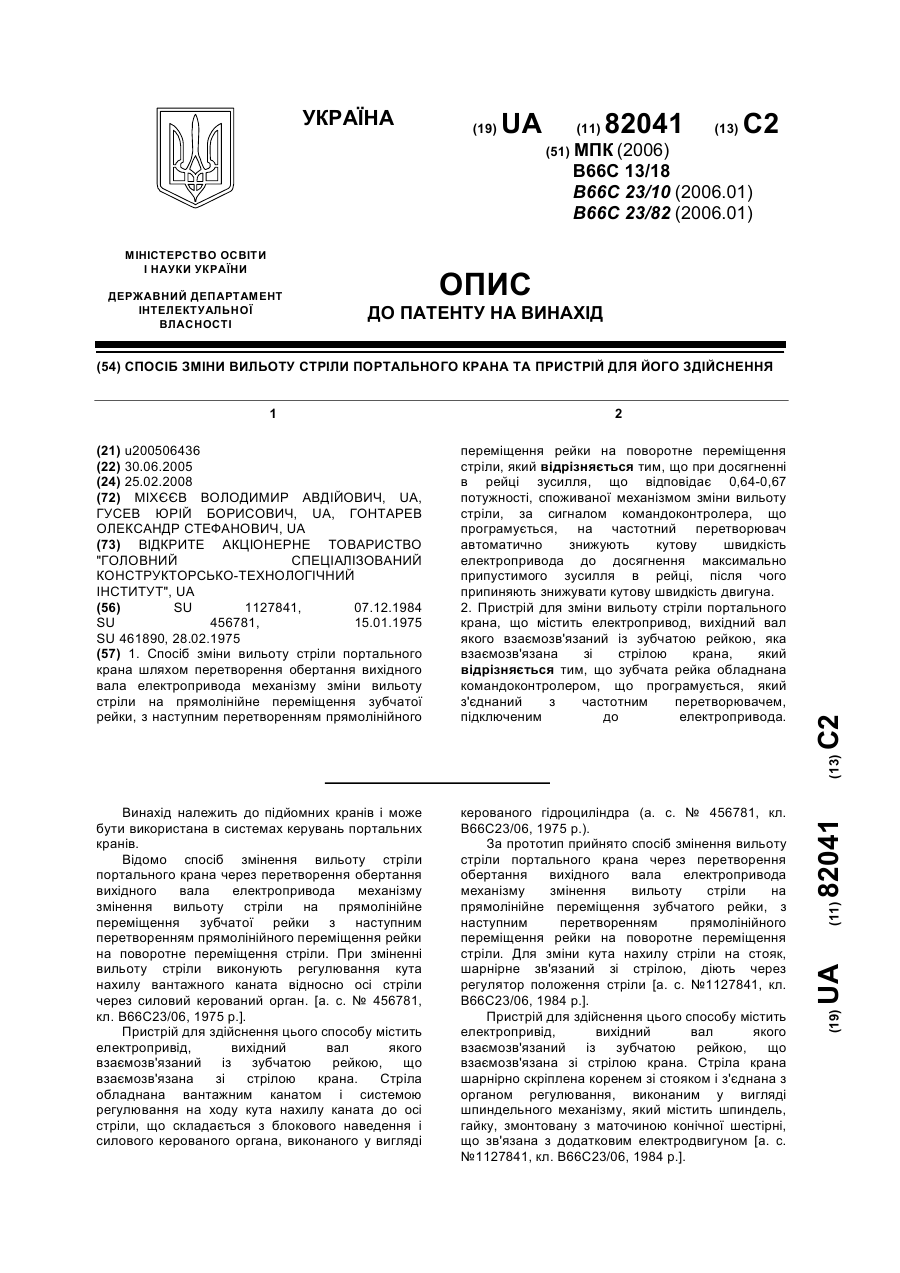
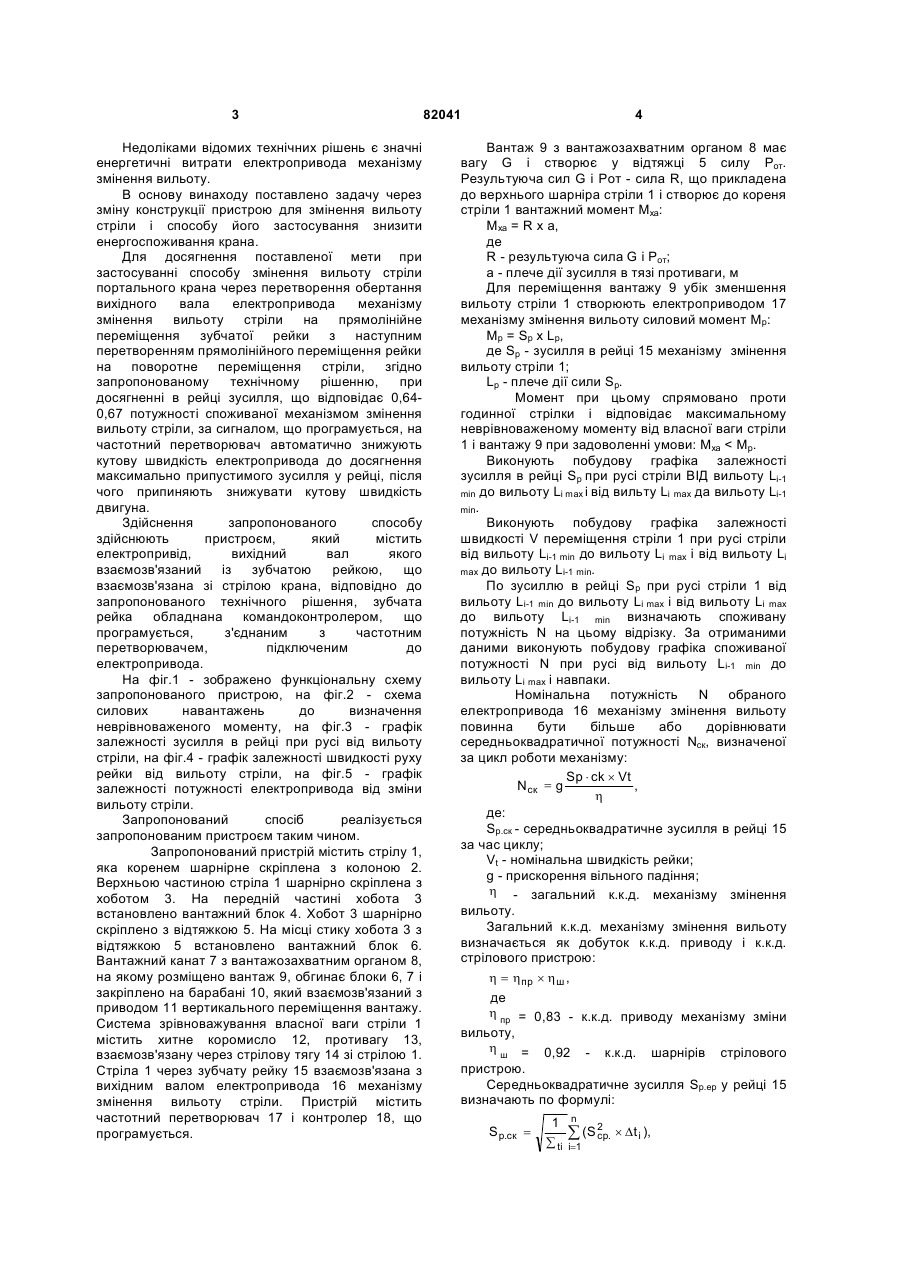
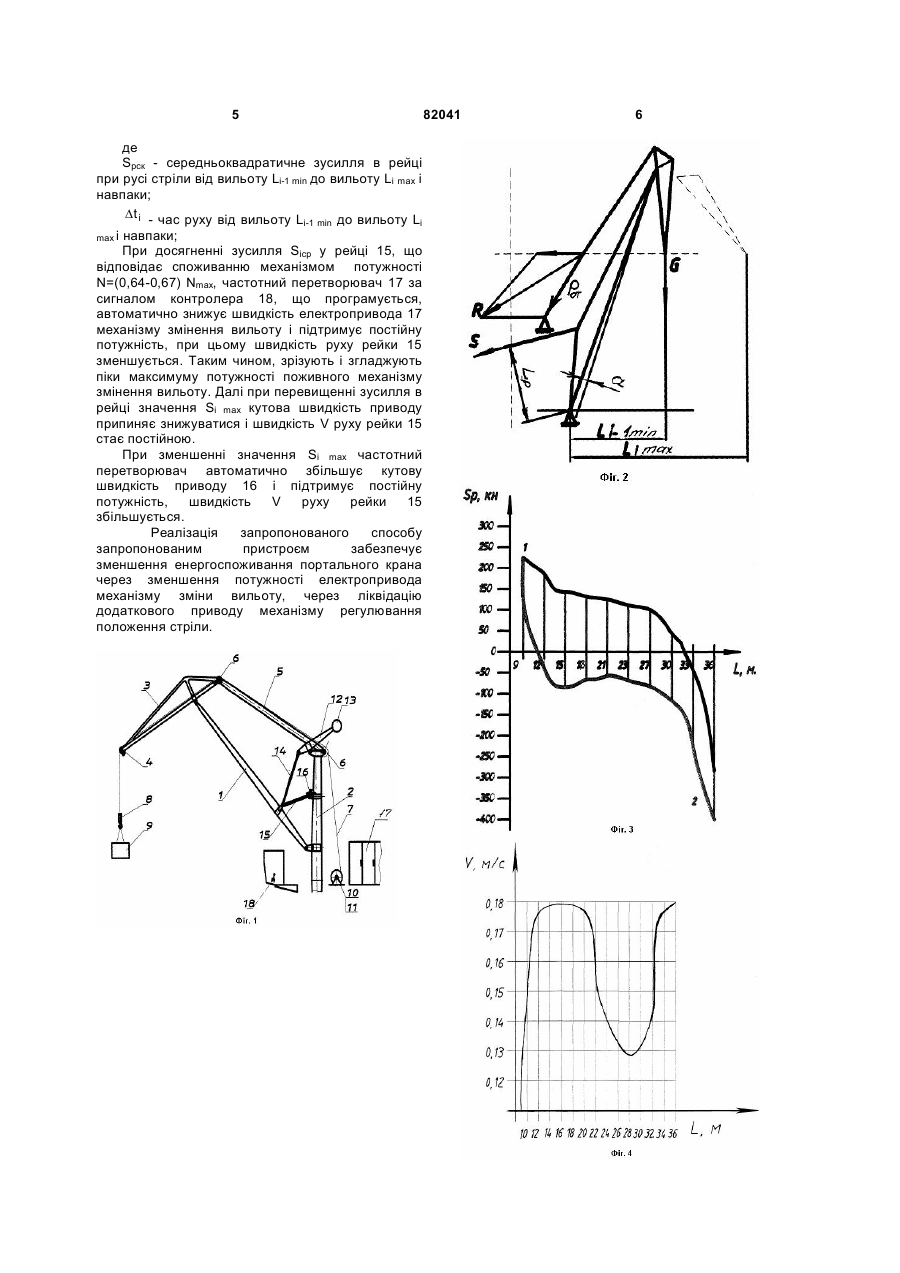
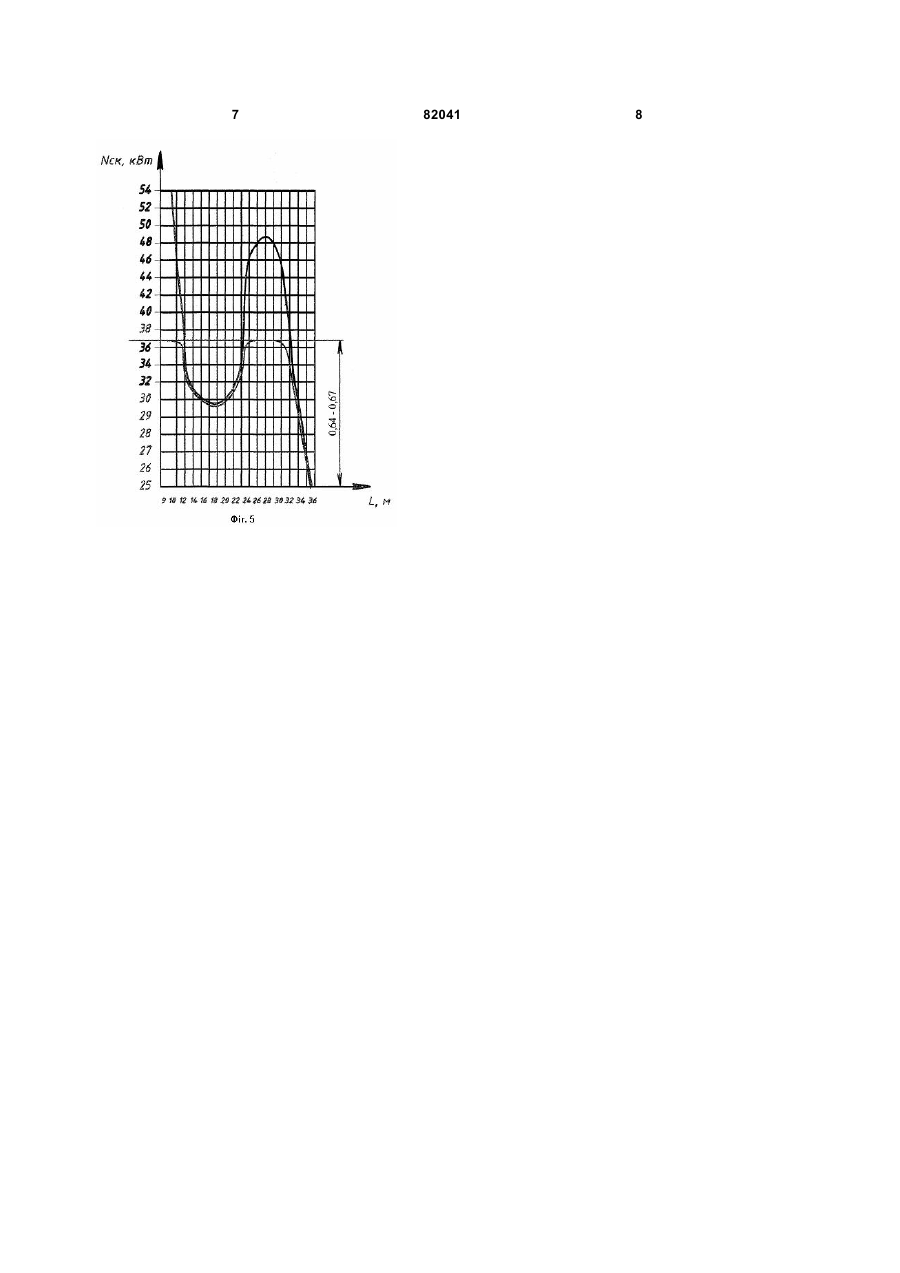
1. Спосіб зміни вильоту стріли портального крана шляхом перетворення обертання вихідного вала електропривода механізму зміни вильоту стріли на прямолінійне переміщення зубчатої рейки, з наступним перетворенням прямолінійного C2 1 3 Недоліками відомих технічних рішень є значні енергетичні витрати електропривода механізму змінення вильоту. В основу винаходу поставлено задачу через зміну конструкції пристрою для змінення вильоту стріли і способу його застосування знизити енергоспоживання крана. Для досягнення поставленої мети при застосуванні способу змінення вильоту стріли портального крана через перетворення обертання вихідного вала електропривода механізму змінення вильоту стріли на прямолінійне переміщення зубчатої рейки з наступним перетворенням прямолінійного переміщення рейки на поворотне переміщення стріли, згідно запропонованому технічному рішенню, при досягненні в рейці зусилля, що відповідає 0,640,67 потужності споживаної механізмом змінення вильоту стріли, за сигналом, що програмується, на частотний перетворювач автоматично знижують кутову швидкість електропривода до досягнення максимально припустимого зусилля у рейці, після чого припиняють знижувати кутову швидкість двигуна. Здійснення запропонованого способу здійснюють пристроєм, який містить електропривід, вихідний вал якого взаємозв'язаний із зубчатою рейкою, що взаємозв'язана зі стрілою крана, відповідно до запропонованого технічного рішення, зубчата рейка обладнана командоконтролером, що програмується, з'єднаним з частотним перетворювачем, підключеним до електропривода. На фіг.1 - зображено функціональну схему запропонованого пристрою, на фіг.2 - схема силових навантажень до визначення неврівноваженого моменту, на фіг.3 - графік залежності зусилля в рейці при русі від вильоту стріли, на фіг.4 - графік залежності швидкості руху рейки від вильоту стріли, на фіг.5 - графік залежності потужності електропривода від зміни вильоту стріли. Запропонований спосіб реалізується запропонованим пристроєм таким чином. Запропонований пристрій містить стрілу 1, яка коренем шарнірне скріплена з колоною 2. Верхньою частиною стріла 1 шарнірно скріплена з хоботом 3. На передній частині хобота 3 встановлено вантажний блок 4. Хобот 3 шарнірно скріплено з відтяжкою 5. На місці стику хобота 3 з відтяжкою 5 встановлено вантажний блок 6. Вантажний канат 7 з вантажозахватним органом 8, на якому розміщено вантаж 9, обгинає блоки 6, 7 і закріплено на барабані 10, який взаємозв'язаний з приводом 11 вертикального переміщення вантажу. Система зрівноважування власної ваги стріли 1 містить хитне коромисло 12, противагу 13, взаємозв'язану через стрілову тягу 14 зі стрілою 1. Стріла 1 через зубчату рейку 15 взаємозв'язана з вихідним валом електропривода 16 механізму змінення вильоту стріли. Пристрій містить частотний перетворювач 17 і контролер 18, що програмується. 82041 4 Вантаж 9 з вантажозахватним органом 8 має вагу G і створює у відтяжці 5 силу Рот. Результуюча сил G і Рот - сила R, що прикладена до верхнього шарніра стріли 1 і створює до кореня стріли 1 вантажний момент Мха: Мха = R х а, де R - результуюча сила G і Рот; а - плече дії зусилля в тязі противаги, м Для переміщення вантажу 9 убік зменшення вильоту стріли 1 створюють електроприводом 17 механізму змінення вильоту силовий момент Мр: Мр = Sp x Lp, де Sp - зусилля в рейці 15 механізму змінення вильоту стріли 1; Lp - плече дії сили Sp. Момент при цьому спрямовано проти годинної стрілки і відповідає максимальному неврівноваженому моменту від власної ваги стріли 1 і вантажу 9 при задоволенні умови: Мха < Мр. Виконують побудову графіка залежності зусилля в рейці Sp при русі стріли ВІД вильоту Li-1 min до вильоту Li max і від вильту Lі max да вильоту Lі-1 min. Виконують побудову графіка залежності швидкості V переміщення стріли 1 при русі стріли від вильоту Lі-1 min до вильоту Lі max і від вильоту Lі max до вильоту Li-1 min. По зусиллю в рейці Sp при русі стріли 1 від вильоту Li-1 min до вильоту Li max і від вильоту Li max до вильоту Lі-1 min визначають споживану потужність N на цьому відрізку. За отриманими даними виконують побудову графіка споживаної потужності N при русі від вильоту Lі-1 min до вильоту Lі max і навпаки. Номінальна потужність N обраного електропривода 16 механізму змінення вильоту повинна бути більше або дорівнювати середньоквадратичної потужності Nск, визначеної за цикл роботи механізму: Sp × ck ´ Vt Nск = g , h де: Sp.cк - середньоквадратичне зусилля в рейці 15 за час циклу; Vt - номінальна швидкість рейки; g - прискорення вільного падіння; h - загальний к.к.д. механізму змінення вильоту. Загальний к.к.д. механізму змінення вильоту визначається як добуток к.к.д. приводу і к.к.д. стрілового пристрою: h = h пр ´ h ш , де h пр = 0,83 - к.к.д. приводу механізму зміни вильоту, h ш = 0,92 - к.к.д. шарнірів стрілового пристрою. Середньоквадратичне зусилля Sp.ep у рейці 15 визначають по формулі: S р.ск = 1 å ti n å (S 2 . ´ Dt i ), cр i=1 5 82041 де Spcк - середньоквадратичне зусилля в рейці при русі стріли від вильоту Lі-1 min до вильоту Li max і навпаки; Dt i - час руху від вильоту L до вильоту L max і і-1 min i навпаки; При досягненні зусилля Sicp у рейці 15, що відповідає споживанню механізмом потужності N=(0,64-0,67) Nmax, частотний перетворювач 17 за сигналом контролера 18, що програмується, автоматично знижує швидкість електропривода 17 механізму змінення вильоту і підтримує постійну потужність, при цьому швидкість руху рейки 15 зменшується. Таким чином, зрізують і згладжують піки максимуму потужності поживного механізму змінення вильоту. Далі при перевищенні зусилля в рейці значення Si max кутова швидкість приводу припиняє знижуватися і швидкість V руху рейки 15 стає постійною. При зменшенні значення Si max частотний перетворювач автоматично збільшує кутову швидкість приводу 16 і підтримує постійну потужність, швидкість V руху рейки 15 збільшується. Реалізація запропонованого способу запропонованим пристроєм забезпечує зменшення енергоспоживання портального крана через зменшення потужності електропривода механізму зміни вильоту, через ліквідацію додаткового приводу механізму регулювання положення стріли. 6 7 82041 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device of changing arm of gantry crane
Автори англійськоюMikhieiev Volodymyr Avdiiovych, Husev Yurii Borysovych, Hontarev Oleksandr Stefanovych
Назва патенту російськоюСпособ изменения вылета стрелы портального крана и устройство для его осуществления
Автори російськоюМихеев Владимир Авдеевич, Гусев Юрий Борисович, Гонтарев Александр Стефанович
МПК / Мітки
МПК: B66C 23/82, B66C 23/10, B66C 13/18
Мітки: зміни, крана, портального, спосіб, здійснення, пристрій, стріли, вильоту
Код посилання
<a href="https://ua.patents.su/4-82041-sposib-zmini-vilotu-strili-portalnogo-krana-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб зміни вильоту стріли портального крана та пристрій для його здійснення</a>
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16134
Опубліковано: 17.07.2006
Автори: Паламарчук Дмитро Анатолійович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 19/00
Мітки: стрілової, горизонтальним, вильоту, переміщенням, зміни, вантажу, механізм, системі, крана
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, який відрізняється тим, що містить поліспаст підйому стріли, який однією блочною обоймою закріплений до стріли, а другою блочною обоймою - до нерухомого стояка, причому вільний кінець каната поліспасту через обвідні блоки заведений на поверхню нециліндричного барабана,...
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16133
Опубліковано: 17.07.2006
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Паламарчук Дмитро Анатолійович
МПК: B66C 19/00
Мітки: зміни, горизонтальним, вантажу, крана, системі, механізм, переміщенням, стрілової, вильоту
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, який відрізняється тим, що на кронштейнах противаги жорстко закріплені некруглі зубчасті сектори, що перебувають в постійному зачепленні з некруглими зубчастими колесами, з'єднаними з редуктором електродвигуна з можливістю отримання обертового моменту від нього, причому...
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу
Номер патенту: 16131
Опубліковано: 17.07.2006
Автори: Ловейкін Вячеслав Сергійович, Паламарчук Дмитро Анатолійович, Ярошенко Володимир Федорович
МПК: B66C 19/00
Мітки: переміщенням, системі, вантажу, механізм, вильоту, стрілової, крана, зміни, горизонтальним
Формула / Реферат:
Механізм зміни вильоту стрілової системи крана з горизонтальним переміщенням вантажу, що містить хобот, контрхобот, жорстку відтяжку, вантажний канат та стрілу, який відрізняється тим, що з кронштейном, який є продовженням жорсткої відтяжки, жорстко з'єднаний некруглий зубчастий сектор, що перебуває в постійному зачепленні з некруглим зубчастим колесом, з'єднаним з редуктором електродвигуна з можливістю отримання обертового моменту.
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу
Номер патенту: 15807
Опубліковано: 17.07.2006
Автори: Ловейкін Вячеслав Сергійович, Почка Костянтин Іванович, Паламарчук Дмитро Анатолійович, Ярошенко Володимир Федорович
МПК: B66C 19/00
Мітки: стріли, керування, зміною, вильоту, пристрій, переміщенням, горизонтальним, країні, вантажу
Формула / Реферат:
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, з механізмом зміни вильоту, який відрізняється тим, що містить шарнірно закріплений до стріли гідроциліндр двосторонньої дії з дросельним регулюванням швидкості переміщення робочої рідини з безштокової у штокову порожнини гідроциліндра при можливості зміни...
Захисний пристрій стріли крана

Номер патенту: 28152
Опубліковано: 16.10.2000
Автори: Куциба Михайло Антонович, Лищишин Омелян Іванович
МПК: B66C 23/90
Мітки: захисний, стріли, крана, пристрій
Формула / Реферат:
Захисний пристрій стріли крана, який складається з датчика довжини, датчика вильоту, датчика зусиль, привода датчика зусиль, який відрізняється тим, що датчик зусиль складається із силомірного кільця, деформація якого пропорційна розміру діючого на нього зусилля трансформаторного перетворювача, який через магнітопровід з обмотками збудження і вихідною обмоткою, розташованими в немагнітному корпусі, перетворює деформацію силомірного кільця в...
Попередній патент: Автоматизована система розробки діагностичного забезпечення
Наступний патент: Пристрій для реєстрації та аналізу механоемісії біопроб
Випадковий патент: Пристосування до розривної машини для визначення опору розрізання спеціальних матеріалів