Спосіб контролю положення пари “клапан – сідло” агрегатів автоматики та стенд для здійснення способу
Номер патенту: 83229
Опубліковано: 25.06.2008
Автори: Стасенко Віталій Олександрович, Порубаймех Володимир Ілліч, Дупліщева Ольга Михайлівна
Формула / Реферат
1. Спосіб контролю положення пари "клапан - сідло" агрегатів автоматики, який полягає в установленні випробовуваного агрегату автоматики на вібростолі віброударної установки, створенні нормативної вібрації і вимірюванні та реєстрації параметрів вібрації, який відрізняється тим, що приєднують до входу й виходу агрегату автоматики гнучкий трубопровід із жиклером і датчиком тиску, підводять на вхід агрегату автоматики робоче тіло під заданим тиском і вимірюють та реєструють у єдиному масштабі часу персональною електронно-обчислювальною машиною (ПЕОМ) параметри вібрації й тиск на вході й виході агрегату автоматики.
2. Стенд для контролю положення пари "клапан - сідло" агрегатів автоматики, який містить віброударну установку, вібростіл, випробовуваний агрегат автоматики і встановлені на вібростолі й агрегаті автоматики віброперетворювачі, який відрізняється тим, що він оснащений гнучким трубопроводом підведення робочого тіла до агрегату автоматики з жиклером і датчиком тиску, гнучким трубопроводом відведення робочого тіла від агрегату автоматики з жиклером і датчиком тиску та ПЕОМ, причому віброперетворювачі й датчики тиску електрично зв'язані з ПЕОМ.
Текст
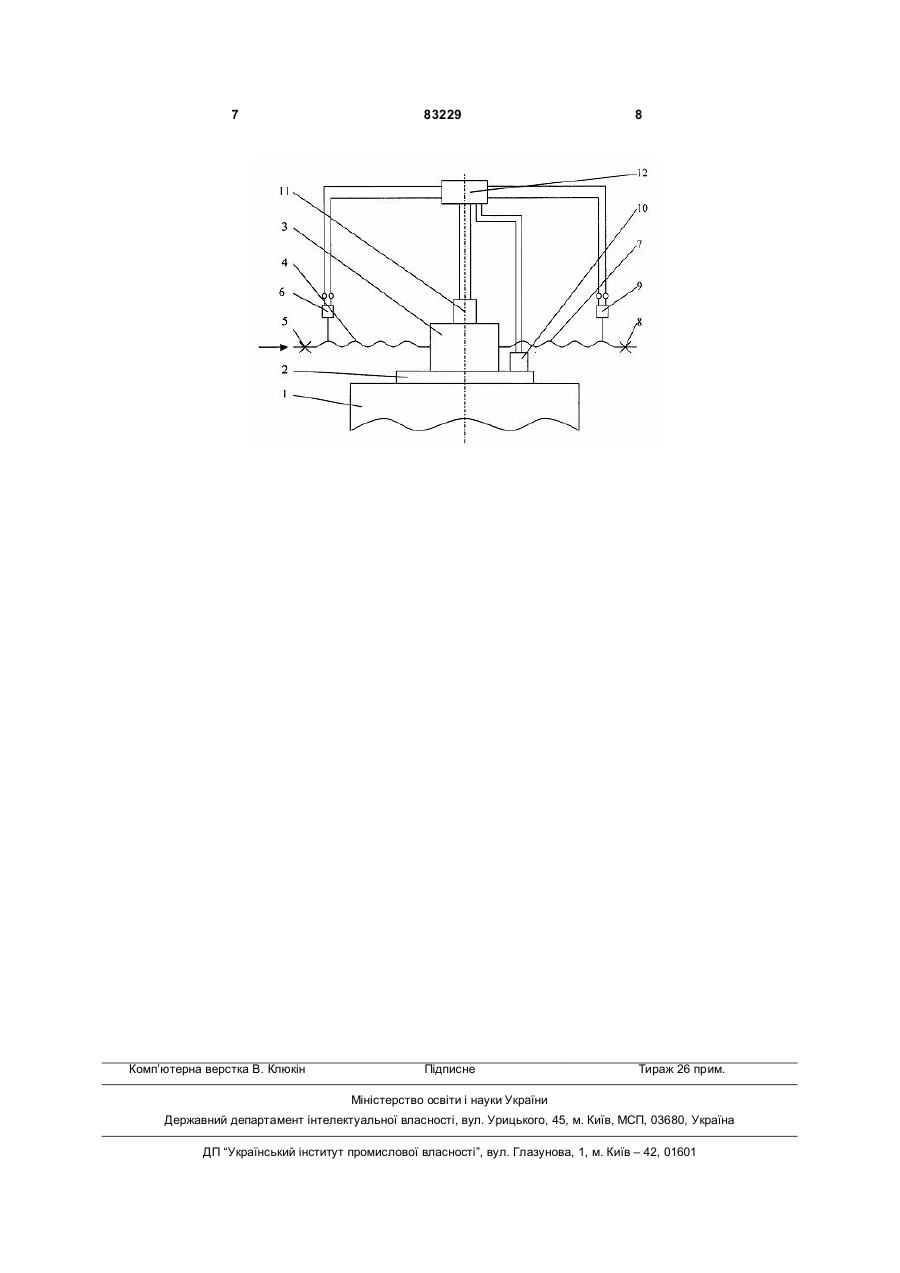
1. Спосіб контролю положення пари "клапан сідло" агрегатів автоматики, який полягає в установленні випробовуваного агрегату автоматики на вібростолі віброударної установки, створенні нормативної вібрації і вимірюванні та реєстрації параметрів вібрації, який відрізняється тим, що C2 2 (19) 1 3 сідло" у випробуваному агрегаті автоматики під час механічних впливів. В основу групи винаходів "Спосіб контролю положення пари "клапан -сідло" агрегатів автоматики та стенд для здійснення способу" поставлено завдання забезпечення контролю фактичного положення пари "клапан -сідло" випробуваного агрегату автоматики в умовах, які імітують натурні умови, під час експлуатації літальних апаратів, у результаті чого на етапі експериментального відпрацювання агрегатів автоматики забезпечується одержання достовірніших відомостей про працездатність конструкції розроблюваних агрегатів автоматики, що дозволяє своєчасно вносити зміни в їх конструкцію і тим самим підвищувати надійність функціонування. Для вирішення поставленого завдання пропонується спосіб, при якому приєднують до входу й виходу агрегату автоматики гнучкі трубопроводи із жиклером і датчиком тиску й у процесі механічних впливів у напрямку осей симетрії агрегату автоматики виконують за допомогою персональної електронно-обчислювальної машини (ПЕОМ) вимірювання та реєстрацію в єдиному масштабі часу параметрів вібрації і тиску на вході й виході агрегату автоматики. Відмітними ознаками запропонованого способу є такі технологічні операції: - приєднання до входу й виходу агрегату автоматики гнучких трубопроводів із жиклером і датчиком тиску; - підведення на вхід агрегату автоматики робочого тіла під заданим тиском; - вимірювання та реєстрація за допомогою ПЕОМ в єдиному масштабі часу в процесі механічних впливів у напрямку осей симетрії агрегату автоматики параметрів вібрації і тиску на вході й виході агрегату автоматики. Застосування в запропонованому способі контролю положення пари "клапан - сідло" агрегату автоматики технологічних операцій приєднання до входу й виходу агрегату автоматики гнучких трубопроводів із жиклером і датчиком тиску, підведення на вхід агрегату автоматики робочого тіла під заданим тиском і вимірювання та реєстрації за допомогою ПЕОМ в єдиному масштабі часу параметрів вібрації і тиску на вході й виході агрегату автоматики забезпечує контроль фактичного положення пари "клапан -сідло" агрегату автоматики в умовах, які імітують натурні умови, наявні під час експлуатації літальних апаратів. Таким чином, сукупність відомих ознак: - установлення випробуваного агрегату автоматики на вібростолі віброударної установки; - створення нормативної вібрації; - вимірювання та реєстрація параметрів вібрації і нових відмітних ознак забезпечує надійний контроль фактичного положення пари "клапан сідло" агрегату автоматики. Спосіб здійснюється таким чином: випробуваний агрегат автоматики встановлюють на вібростолі віброударної установки, приєднують до входу і виходу агрегату автоматики гнучкі трубопроводи із жиклером і датчиком тиску, підводять на вхід агрегату автоматики робоче тіло під заданим тис 83229 4 ком, створюють механічний вплив на випробуваний агрегат автоматики у напрямку його осей симетрії і провадять вимірювання та реєстрацію за допомогою ПЕОМ в єдиному масштабі часу параметрів вібрації і тиску на вході й виході агрегату автоматики. Про положення пари "клапан - сідло" агрегату автоматики судять за характером зміни тиску в підвідному і відвідному трубопроводах. У випадку встановлення на вібростіл віброударної установки нормально закритого клапана, підведення на його вхід робочого тіла під заданим тиском і наявності в клапані негерметичності пари "клапан - сідло" робочий газ, що вийшов через нещільність пари "клапан - сідло" у процесі дії на неї механічного впливу, потрапляє до гнучкого трубопроводу на виході клапана. Встановлений у цьому гнучкому трубопроводі датчик тиску фіксує появу тиску в трубопроводі. Шляхом одночасного вимірювання та реєстрації параметрів, механічного впливу і тиску в гнучких трубопроводах на вході й виході клапана можна надійно та оперативно оцінювати ступінь герметичності пари "клапан сідло" у процесі механічних впливів. У випадку встановлення на вібростіл віброударної установки нормально відкритого клапана, підведення на вхід клапана робочого тіла під заданим тиском і створення механічного впливу під час виникнення прикривання пари "клапан - сідло" буде змінюватися характер течії через неї робочого тіла, а, отже, й тиск робочого тіла в підвідному і відвідному гнучких трубопроводах, що зафіксують датчики тиску, встановлені в цих трубопроводах. Шляхом одночасного вимірювання та реєстрації параметрів механічного впливу і тиску в підвідному та відвідному гнучких трубопроводах можна надійно й оперативно оцінювати працездатність випробуваного агрегату автоматики в момент дії на нього механічного впливу. Запропонований спосіб забезпечує контроль положення пари "клапан -сідло" агрегату автоматики за умов, які імітують умови, наявні під час експлуатації агрегату автоматики, що дозволяє на етапі конструкторської розробки своєчасно виявляти найслабші елементи конструкції агрегату автоматики та вносити до неї відповідні зміни. Відомий пристрій для випробування пари "клапан-сідло" в агрегатах автоматики, що містить випробуваний об'єкт, платформу і джерело впливу [Ленк А., Ренитц Ю. Механические испытания приборов и аппаратов. - М., изд-во "Мир", 1976. - С. 183, рис. 7.2]. Недоліком цього пристрою є те, що він не дозволяє визначити фактичне положення пари "клапан - сідло" агрегату автоматики в процесі впливу на нього віброударних навантажень, які імітують експлуатаційні, оскільки пристрій не містить елементів, що дають інформацію про положення пари "клапан - сідло". Найближчим за технічною сутністю до запропонованого стенда є пристрій, що містить вібростенд, вібростіл, випробуваний агрегат автоматики і віброперетворювачі, встановлені на вібростолі та випробуваному агрегаті автоматики [Теоретические основы испытаний и экспериментальная отра 5 ботка сложных технических систем. - М., изд-во "Логос", 2003. - С. 350, 351 – прототип]. Недоліком цього пристрою є неможливість імітувати натурні умови роботи агрегату автоматики. Поставлене завдання вирішується тим, що стенд для здійснення запропонованого способу містить віброударну установку, вібростіл, випробуваний агрегат автоматики і віброперетворювачі, встановлені на вібростолі та випробуваному агрегаті автоматики, гнучкі трубопроводи підведення та відведення робочого тіла із жиклером і датчиком тиску, причому віброперетворювачі і датчики тиску електричне зв'язані з ПЕОМ. Відмітними ознаками запропонованого стенда є: - гнучкий трубопровід підведення робочого тіла із жиклером і датчиком тиску; - гнучкий трубопровід відведення робочого тіла із жиклером і датчиком тиску; - персональна електронно-обчислювальна машина (ПЕОМ), яка електричне зв'язана з датчиками тиску і віброперетворювачами; Наявність у запропонованому стенді гнучкого трубопроводу підведення робочого тіла до агрегату автоматики із жиклером і датчиком тиску, гнучкого трубопроводу відведення робочого тіла із жиклером і датчиком тиску, ПЕОМ та електричний зв'язок віброперетворювачів і датчиків тиску з ПЕОМ забезпечує надійний постійний контроль положення пари "клапан - сідло" агрегату автоматики в умовах, які імітують натурні умови роботи агрегату автоматики. Таким чином, сукупність відомих ознак: - віброударна установка; - вібростіл; - випробуваний агрегат автоматики; - віброперетворювачі, встановлені на вібростолі й агрегаті автоматики і нових відмітних ознак забезпечує контроль фактичного положення пари "клапан - сідло" агрегату автоматики при імітації натурних умов. Для пояснення роботи стенда додано креслення, на якому зображено стенд для здійснення способу контролю положення пари "клапан - сідло" агрегату автоматики, де: 1 - віброударна установка; 2 - вібростіл; 3 - випробуваний агрегат автоматики; 4 - гнучкий трубопровід підведення робочого тіла; 5 - жиклер; 6 - датчик тиску; 7 - гнучкий трубопровід відведення робочого тіла; 8 - жиклер; 9 датчик тиску; 10 - задавальний віброперетворювач; 11 - вимірювальний віброперетворювач; 12 персональна електронно-обчислювальна машина. Конкретний приклад реалізації способу полягає в такому: на вібростіл 2 віброударної установки 83229 6 1 встановлюють випробуваний агрегат автоматики 3. Приєднують до входу агрегату автоматики 3 гнучкий трубопровід 4 підведення робочого тіла, в якому встановлені жиклер 5 і датчик тиску 6. До виходу агрегату автоматики 3 приєднують гнучкий трубопровід 7 із встановленими в ньому жиклером 8 і датчиком тиску 9. Установлюють на вібростіл 2 задавальний віброперетворювач 10, а на випробуваний агрегат автоматики 3 - вимірювальний віброперетворювач 11. Приєднують датчики тиску 6 і 9 та віброперетворювачі 10 і 11 до персональної електронно-обчислювальної машини 12. Подають на вхід агрегату автоматики 3 робоче тіло під заданим тиском, включають в роботу віброударну установку 1 і проводять випробування агрегату автоматики 3 у діапазоні частот, зазначеному в технічному завданні, програмі випробувань або в технічних умовах, при плавній зміні частот або на фіксованих частотах із тривалістю вібронавантаження в кожному напрямку осей симетрії агрегату автоматики 3 не менше часу впливу натурних вібрацій. При цьому реєструють сигнали датчиків тиску 6 і 9 та віброперетворювачів 10 і 11 в єдиному масштабі часу на персональній електроннообчислювальній машині 12. Якщо на вібростенд 2 віброударної установки 1 встановлений нормально закритий клапан 3, то критерієм закритого положення пари "клапан - сідло" у процесі механічних впливів буде відсутність появи тиску в гнучкому відвідному трубопроводі 7, про що свідчить нульовий (початковий) сигнал тиску, що фіксується ПЕОМ 12. Під час виникнення відкриття пари "клапан - сідло" на деякій частоті вібронавантажень у відвідному гнучкому трубопроводі 7 підвищується тиск робочого тіла, що відразу ж фіксується датчиком тиску 9 і ПЕОМ 12. Під час встановлення на вібростіл 2 віброударної установки 1 нормально відкритого клапана 3 і накладень на клапан 3 механічного впливу критерієм наявності постійного зазора в парі "клапан - сідло" є сталість тиску на вході в клапан 3 і виході клапана З, вимірювана датчиками тиску 6 і 9, відповідно, і ПЕОМ 12. У випадку зміни положення пари "клапан - сідло" у підвідному 4 і відвідному 7 гнучких трубопроводах будуть наявні пульсації тиску, які реєструються датчиками тиску 6 і 9 та ПЕОМ 12. Застосування запропонованих способу і стенда забезпечує під час стендового експериментального відпрацювання агрегатів автоматики надійний контроль положення пари "клапан - сідло" у процесі дії на них механічних впливів і тим самим підвищувати надійність агрегатів автоматики під час їх роботи в натурних умовах. 7 Комп’ютерна верстка В. Клюкін 83229 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of position of pair valve-seat of automation units and stand for implementation of the method
Автори англійськоюPorubaimekh Volodymyr Illich, Duplischeva Olha Mykhailivna, Stasenko Vitalii Oleksandrovych
Назва патенту російськоюСпособ контроля положения пары "клапан - седло" агрегатов автоматики и стенд для осуществления способа
Автори російськоюПорубаймех Владимир Ильич, Дуплищева Ольга Михайловна, Стасенко Виталий Александрович
МПК / Мітки
Мітки: стенд, способу, сідло, пари, агрегатів, автоматики, положення, спосіб, клапан, контролю, здійснення
Код посилання
<a href="https://ua.patents.su/4-83229-sposib-kontrolyu-polozhennya-pari-klapan-sidlo-agregativ-avtomatiki-ta-stend-dlya-zdijjsnennya-sposobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю положення пари “клапан – сідло” агрегатів автоматики та стенд для здійснення способу</a>
Спосіб випробувань агрегатів автоматики на спільну дію механічних діянь, поперечної сили і температури та пристрій для здійснення способу
Номер патенту: 59492
Опубліковано: 15.09.2003
Автори: Демченко Сергій Андрійович, Дупліщева Ольга Михайлівна, Порубаймех Володимир Ілліч, Московцев Олег Сергійович
МПК: G01M 19/00, G01M 7/00
Мітки: спосіб, способу, температури, діянь, механічних, сили, випробувань, здійснення, спільну, дію, автоматики, агрегатів, пристрій, поперечної
Формула / Реферат:
1. Спосіб випробувань агрегатів автоматики на спільну дію механічних діянь, поперечної сили і температури шляхом створення механічних діянь і прикладання поперечної сили перпендикулярно до напрямку механічних діянь, який відрізняється тим, що створюють поперечну силу тарованою пружиною перпендикулярно до поздовжньої осі агрегату автоматики, термостатують навантажений агрегат автоматики з пристосуванням для кріплення агрегату автоматики на...
Спосіб випробувань агрегатів автоматики на спільну дію зниженого атмосферного тиску і змінної температури і пристрій для здійснення способу
Номер патенту: 77963
Опубліковано: 15.02.2007
Автори: Порубаймех Володимир Ілліч, Масалович Олександр Володимирович, Дупліщева Ольга Михайлівна, Горський Ігор Костянтинович
МПК: G05B 23/00, G01M 19/00, G01D 21/00, G01M 3/02
Мітки: атмосферного, дію, способу, пристрій, спосіб, зниженого, змінної, тиску, спільну, автоматики, випробувань, агрегатів, здійснення, температури
Формула / Реферат:
1. Спосіб випробувань агрегатів автоматики на спільну дію зниженого атмосферного тиску і змінної температури у вакуумній камері шляхом підведення до випробуваного агрегату автоматики контрольної газової суміші під робочим тиском і навперемінного нагрівання й охолодження випробуваного агрегату автоматики згідно з заданим законом, який відрізняється тим, що поміщують вакуумну камеру у теплохолодильну камеру, створюють у вакуумній камері заданий...
Спосіб випробувань агрегатів автоматики на спільну дію вібрації та поперечної сили і пристрій для здійснення способу
Номер патенту: 18657
Опубліковано: 25.12.1997
Автори: Ногаєць Анатолій Іванович, Порубаймех Володимир Ілліч, Дубліщева Ольга Михайлівна
МПК: G01M 7/00
Мітки: поперечної, способу, здійснення, спільну, вібрації, автоматики, агрегатів, спосіб, дію, сили, випробувань, пристрій
Формула / Реферат:
1. Способ испытаний агрегатов автоматики на совместное действие вибрации и поперечной силы путем его установки с помощью приспособления на стол вибрационной установки, создания нормативной вибрации и приложения поперечной виброударному нагружению силы, отличающийся тем, что направляют поперечную силу через центр тяжести испытуемого агрегата автоматики перпендикулярно к направлению виброударного нагружения и изменяют величину поперечной силы в...
Спосіб вимірювання резонансних частот агрегатів автоматики виробів
Номер патенту: 81035
Опубліковано: 26.11.2007
Автори: Макотер Олександр Петрович, Порубаймех Володимир Ілліч, Дупліщева Ольга Михайлівна, Зайцев Віктор Іванович
МПК: G01M 7/00, G01H 13/00
Мітки: вимірювання, виробів, резонансних, агрегатів, частот, спосіб, автоматики
Формула / Реферат:
Спосіб вимірювання резонансних частот агрегатів автоматики виробів, за яким встановлюють агрегат автоматики на вібростенді, розміщують контрольний перший віброперетворювач на вібростенді та приєднують його до системи керування вібростендом, розміщують другий вимірювальний віброперетворювач на корпусі агрегату автоматики, розміщують третій вимірювальний віброперетворювач на вібростенді, приєднують другий і третій вимірювальні...
Установка для термоциклічних випробувань агрегатів автоматики при зниженому атмосферному тиску
Номер патенту: 77220
Опубліковано: 15.11.2006
Автори: Котрехов Борис Іванович, Горський Ігор Костянтинович, Демченко Сергій Андрійович, Порубаймех Володимир Ілліч, Дупліщева Ольга Михайлівна
МПК: G01N 25/00, G05B 23/00
Мітки: зниженому, випробувань, автоматики, атмосферному, агрегатів, тиску, установка, термоциклічних
Формула / Реферат:
Установка для термоциклічних випробувань агрегатів автоматики при зниженому атмосферному тиску, що містить вакуумну камеру з ковпаком, плиту, систему відкачки повітря, системи охолодження і нагрівання, систему контролю герметичності випробуваного агрегату автоматики і систему регулювання, вимірювання і реєстрації температури, яка відрізняється тим, що в ковпаку вакуумної камери розташований контейнер-радіатор, виконаний у формі прямокутного...
Попередній патент: Пристрій для стикування та розділення відсіків
Наступний патент: Заміщені похідні 3-алкіл- і 3-алкенілазетидинів
Випадковий патент: Дисковий копач