Диференціальний індуктивний датчик зусиль

Формула / Реферат
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, який відрізняється тим, що прохідний якір виконаний ![]() - подібної форми, торці в якому утворюють гострі кути, а зазначені осі зміщені від торців прохідного якоря на відстань, що дорівнює радіусу магнітопроводу з котушкою.
- подібної форми, торці в якому утворюють гострі кути, а зазначені осі зміщені від торців прохідного якоря на відстань, що дорівнює радіусу магнітопроводу з котушкою.
Текст
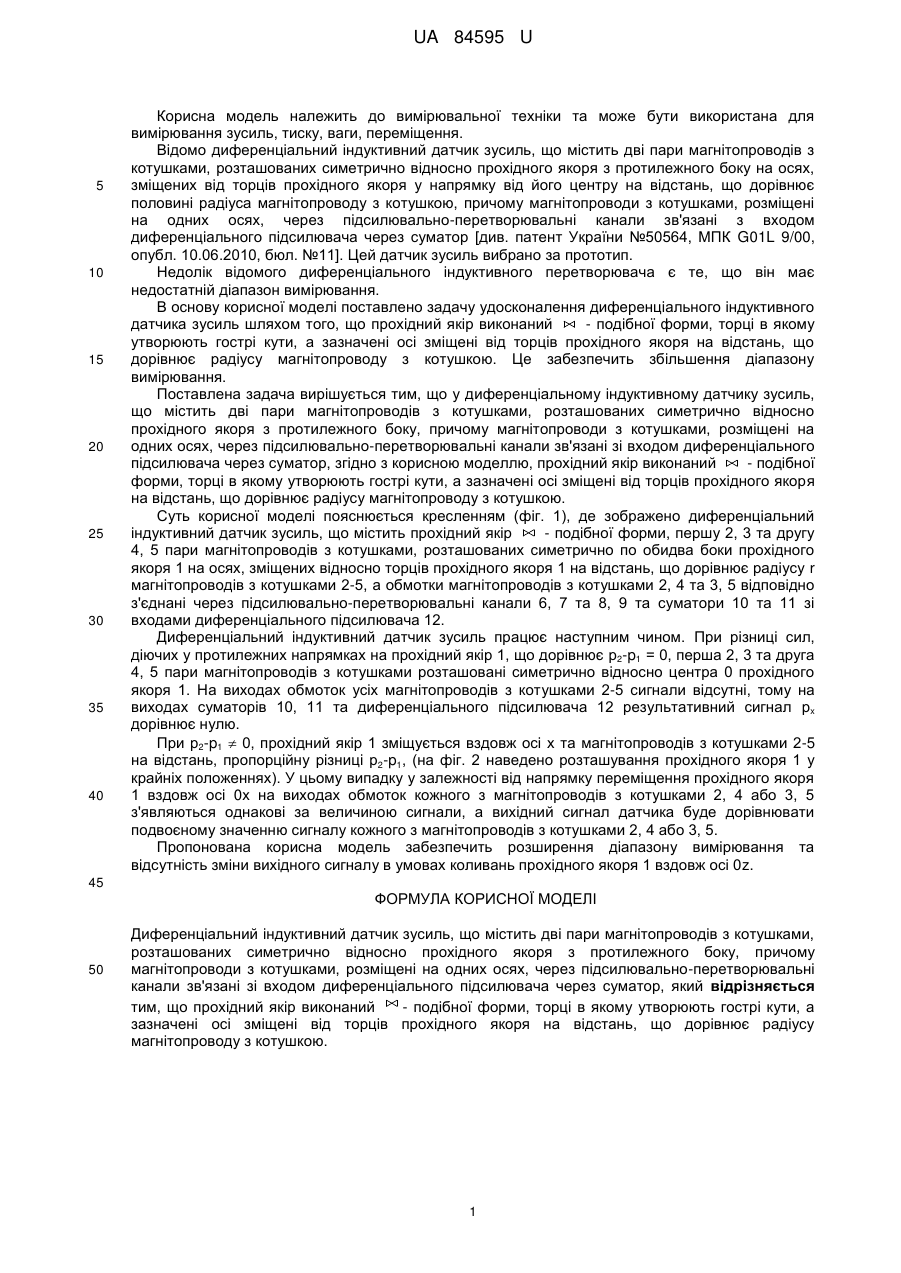
Реферат: UA 84595 U UA 84595 U 5 10 15 20 25 30 35 40 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання зусиль, тиску, ваги, переміщення. Відомо диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального підсилювача через суматор [див. патент України №50564, МПК G01L 9/00, опубл. 10.06.2010, бюл. №11]. Цей датчик зусиль вибрано за прототип. Недолік відомого диференціального індуктивного перетворювача є те, що він має недостатній діапазон вимірювання. В основу корисної моделі поставлено задачу удосконалення диференціального індуктивного датчика зусиль шляхом того, що прохідний якір виконаний - подібної форми, торці в якому утворюють гострі кути, а зазначені осі зміщені від торців прохідного якоря на відстань, що дорівнює радіусу магнітопроводу з котушкою. Це забезпечить збільшення діапазону вимірювання. Поставлена задача вирішується тим, що у диференціальному індуктивному датчику зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, згідно з корисною моделлю, прохідний якір виконаний - подібної форми, торці в якому утворюють гострі кути, а зазначені осі зміщені від торців прохідного якоря на відстань, що дорівнює радіусу магнітопроводу з котушкою. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено диференціальний індуктивний датчик зусиль, що містить прохідний якір - подібної форми, першу 2, 3 та другу 4, 5 пари магнітопроводів з котушками, розташованих симетрично по обидва боки прохідного якоря 1 на осях, зміщених відносно торців прохідного якоря 1 на відстань, що дорівнює радіусу r магнітопроводів з котушками 2-5, а обмотки магнітопроводів з котушками 2, 4 та 3, 5 відповідно з'єднані через підсилювально-перетворювальні канали 6, 7 та 8, 9 та суматори 10 та 11 зі входами диференціального підсилювача 12. Диференціальний індуктивний датчик зусиль працює наступним чином. При різниці сил, діючих у протилежних напрямках на прохідний якір 1, що дорівнює р2-p1 = 0, перша 2, 3 та друга 4, 5 пари магнітопроводів з котушками розташовані симетрично відносно центра 0 прохідного якоря 1. На виходах обмоток усіх магнітопроводів з котушками 2-5 сигнали відсутні, тому на виходах суматорів 10, 11 та диференціального підсилювача 12 результативний сигнал рx дорівнює нулю. При р2-p1 0, прохідний якір 1 зміщується вздовж осі х та магнітопроводів з котушками 2-5 на відстань, пропорційну різниці р2-p1, (на фіг. 2 наведено розташування прохідного якоря 1 у крайніх положеннях). У цьому випадку у залежності від напрямку переміщення прохідного якоря 1 вздовж осі 0х на виходах обмоток кожного з магнітопроводів з котушками 2, 4 або 3, 5 з'являються однакові за величиною сигнали, а вихідний сигнал датчика буде дорівнювати подвоєному значенню сигналу кожного з магнітопроводів з котушками 2, 4 або 3, 5. Пропонована корисна модель забезпечить розширення діапазону вимірювання та відсутність зміни вихідного сигналу в умовах коливань прохідного якоря 1 вздовж осі 0z. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, який відрізняється тим, що прохідний якір виконаний - подібної форми, торці в якому утворюють гострі кути, а зазначені осі зміщені від торців прохідного якоря на відстань, що дорівнює радіусу магнітопроводу з котушкою. 1 UA 84595 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, диференціальний, зусиль, індуктивний
Код посилання
<a href="https://ua.patents.su/4-84595-diferencialnijj-induktivnijj-datchik-zusil.html" target="_blank" rel="follow" title="База патентів України">Диференціальний індуктивний датчик зусиль</a>
Диференціальний індуктивний датчик зусиль
Номер патенту: 56822
Опубліковано: 25.01.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: індуктивний, диференціальний, зусиль, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованими симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками розміщені на одних осях і через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 83549
Опубліковано: 10.09.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: зусиль, датчик, індуктивний, диференціальний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального підсилювача через суматор, який відрізняється тим, що зазначені осі зміщені від торців прохідного якоря у напрямку від його центра на відстань,...
Диференціальний індуктивний датчик зусиль
Номер патенту: 55510
Опубліковано: 10.12.2010
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: індуктивний, диференціальний, зусиль, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 61618
Опубліковано: 25.07.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: індуктивний, диференціальний, зусиль, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 50564
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
Мітки: зусиль, диференціальний, індуктивний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить першу пару магнітопроводів з котушками, розміщену по один бік прохідного якоря у зонах його протилежних торців, який відрізняється тим, що у датчику розташовано другу пару магнітопроводів з котушками симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з...
Попередній патент: Ваговимірювальний датчик
Наступний патент: Пристрій для контролю виробів, армованих металевими линвами
Випадковий патент: Процес одержання засобу специфічної профілактики сибірки тварин з використанням штаму bacillus anthracis sterne 34f2