Лінійний індукційний апарат
Номер патенту: 86108
Опубліковано: 25.03.2009
Автори: Богаєнко Микола Володимирович, Шуляк Володимир Миколайович, Орлов Ігор Іванович, Попков Володимир Сергійович

Формула / Реферат
Лінійний індукційний апарат, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що є кришкою завантажувального вікна і має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб і в якій розміщені феромагнітні робочі частки, який відрізняється тим, що камера в нижній частині внутрішнього об'єму обладнана дистанційним елементом з електропровідним покриттям зі сторони робочого об'єму камери, на кожній з подовжніх кінцевих частин дистанційного елемента змонтовано по ряду стійок, між якими на середині висоти робочого об'єму камери паралельно подовжній осі камери встановлено струни з електропровідного матеріалу, при цьому струни, електропровідне покриття дистанційного елемента та корпус камери електрично з'єднані між собою і контуром заземлення.
Текст
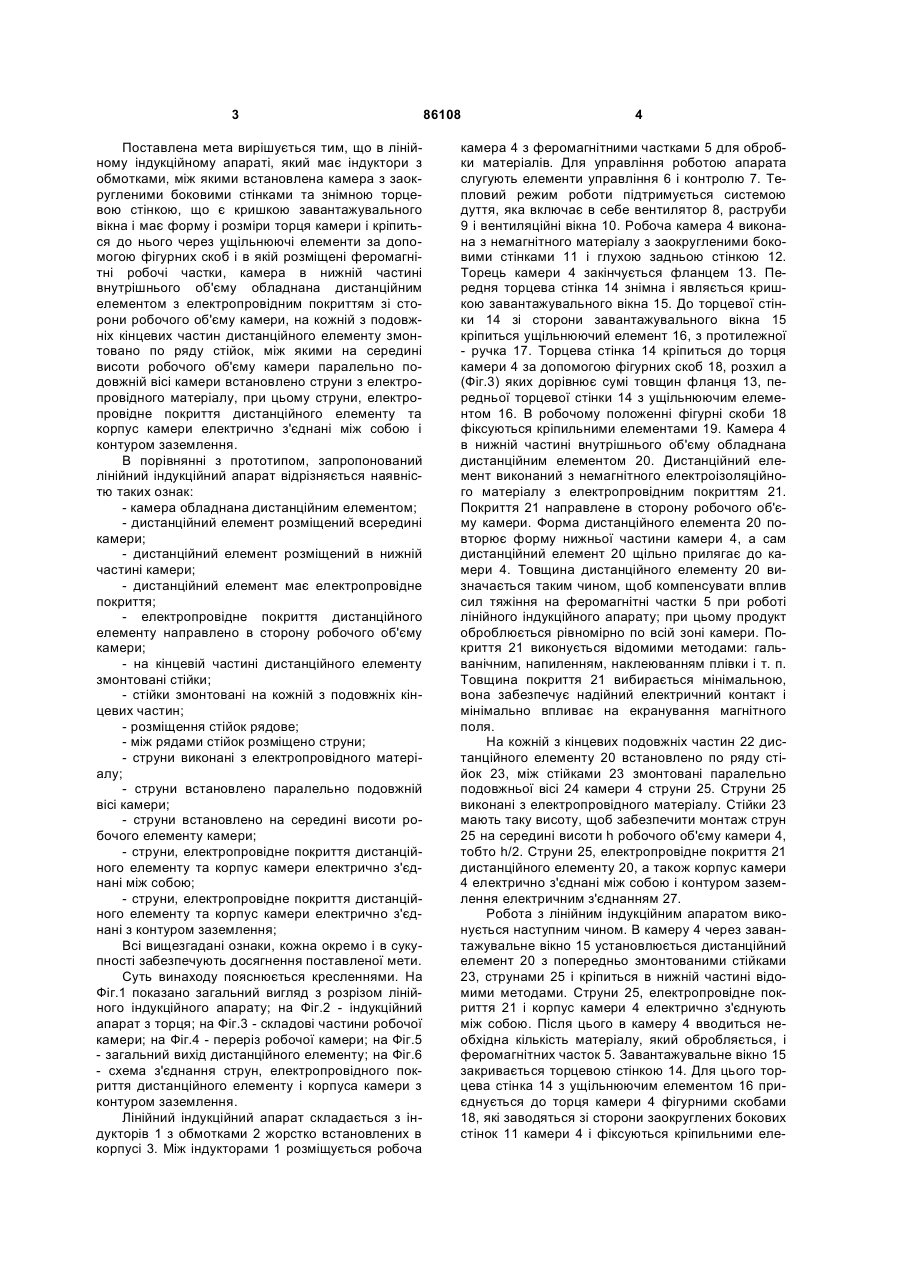
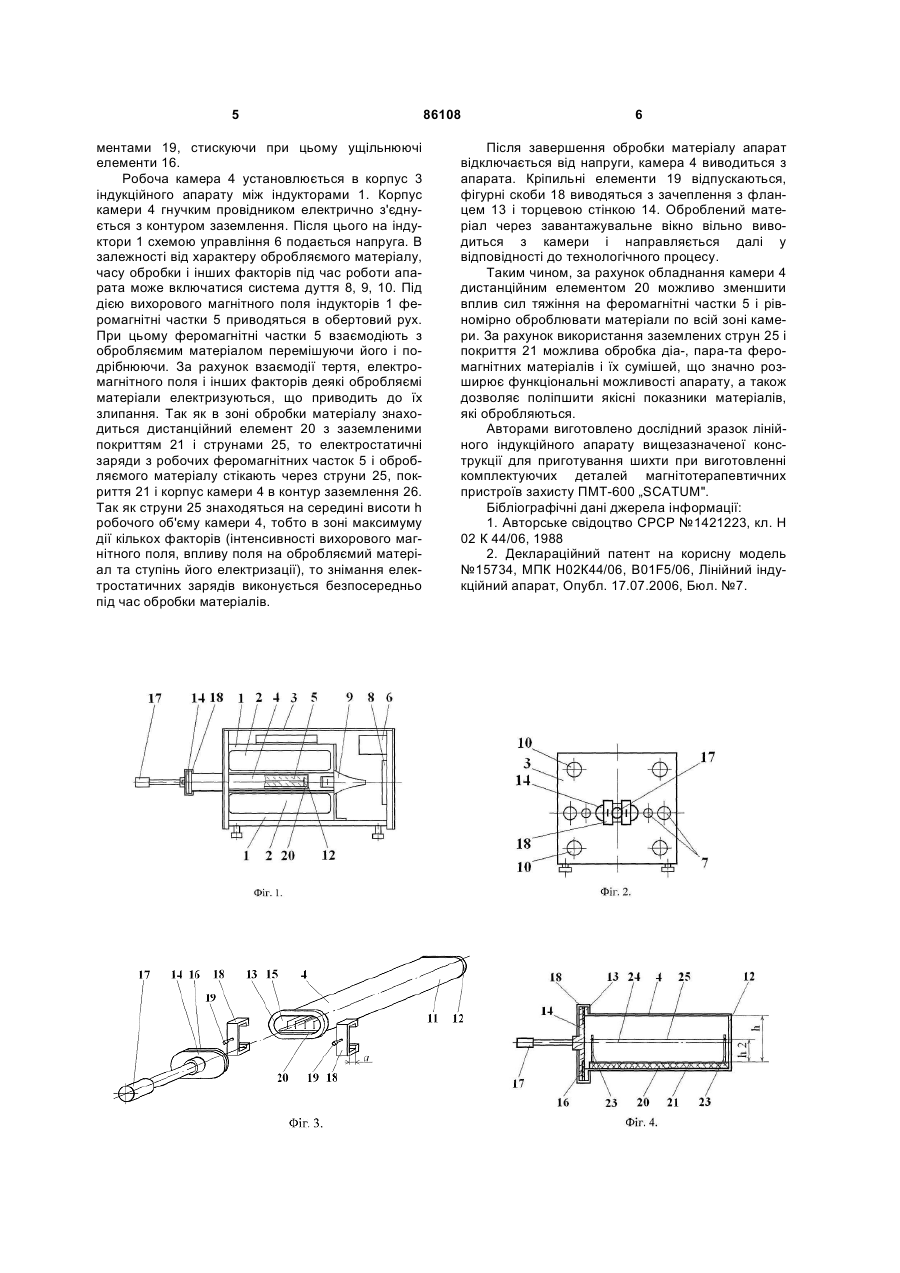
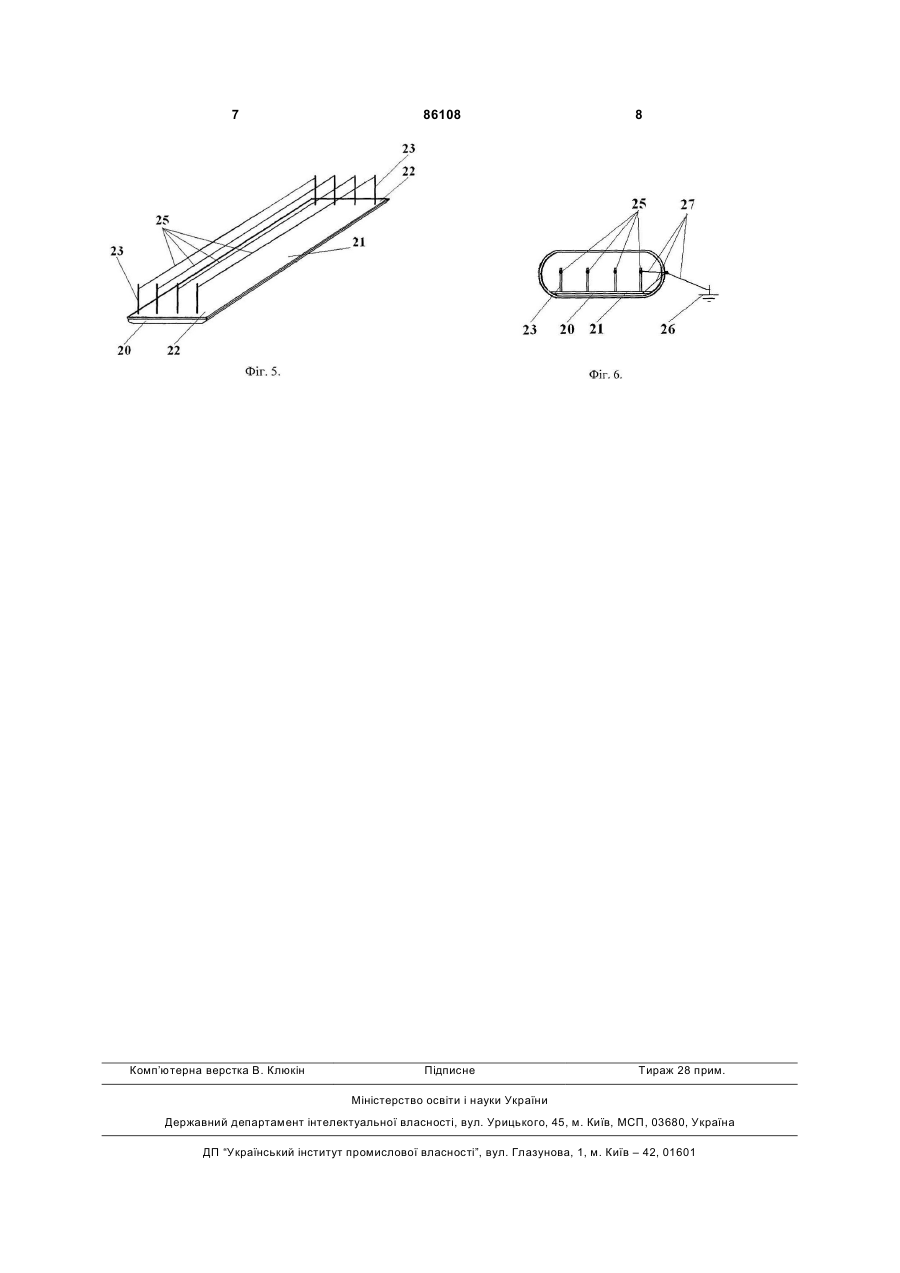
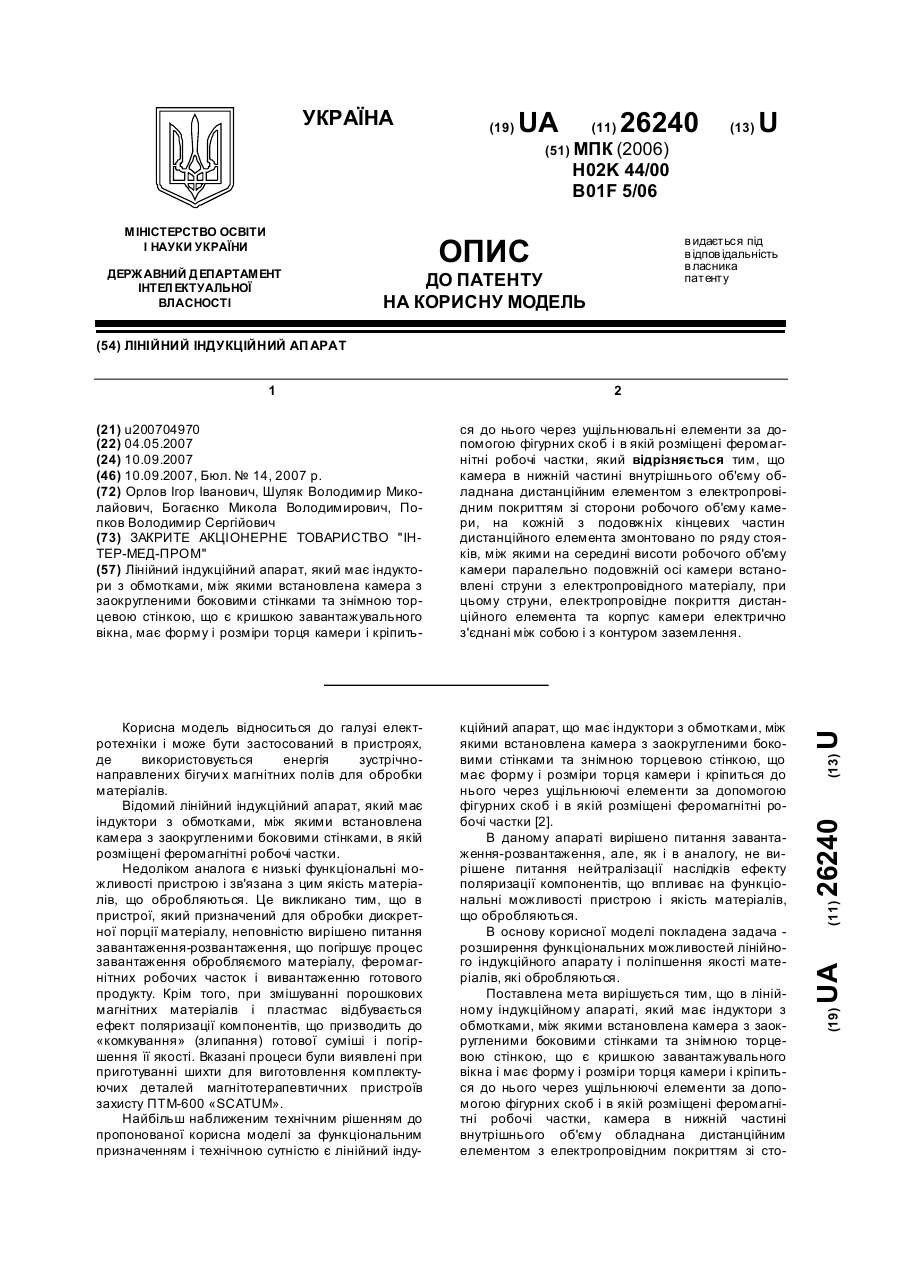
Лінійний індукційний апарат, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що є кришкою завантажувального вікна і має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб і в якій розміщені феромагнітні робочі частки, який відрізняється тим, що камера в нижній частині внутрішнього об'єму обладнана дистанційним елементом з електропровідним покриттям зі сторони робочого об'єму камери, на кожній з подовжніх кінцевих частин дистанційного елемента змонтовано по ряду стійок, між якими на середині висоти робочого об'єму камери паралельно подовжній осі камери встановлено струни з електропровідного матеріалу, при цьому струни, електропровідне покриття дистанційного елемента та корпус камери електрично з'єднані між собою і контуром заземлення. Винахід відноситься до галузі електротехніки і може бути застосований в пристроях, де використовується енергія зустрічно-направлених бігучих магнітних полів для обробки матеріалів. Відомий лінійний індукційний апарат, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками, в якій розміщені феромагнітні робочі частки. Недоліком аналога є низькі функціональні можливості пристрою і зв'язана з цим якість матеріалів, що обробляються. Це викликано тим, що в пристрої, який призначений для обробки дискретної порції матеріалу, неповністю вирішено питання завантаження-розвантаження, що погіршує процес завантаження обробляємого матеріалу, феромагнітних робочих часток і вивантаженню готового продукту. Крім того, при змішуванні порошкових магнітних матеріалів і пластмас відбувається ефект поляризації компонентів, що призводить до «комкування» (злипання) готової суміші і погіршення її якості. Вказані процеси були виявлені при приготуванні шихти для виготовлення комплекту ючих деталей магнітотерапевтичних пристроїв захисту ПТМ-600 «SCATUM». Найбільш наближеним технічним рішенням до пропонованого винаходу за функціональним призначенням і технічною сутністю є лінійний індукційний апарат, що має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб і в якій розміщені феромагнітні робочі частки [2]. В даному апараті вирішено питання завантаження-розвантаження, але, як і в аналогу, не вирішене питання нейтралізації наслідків ефекту поляризації компонентів, що впливає на функціональні можливості пристрою і якість матеріалів, що обробляються. В основу винаходу покладена мета - розширення функціональних можливостей лінійного індукційного апарату і поліпшення якості матеріалів, які обробляються. (19) UA (11) 86108 (13) (21) a200704969 (22) 04.05.2007 (24) 25.03.2009 (46) 25.03.2009, Бюл.№ 6, 2009 р. (72) ОРЛОВ ІГОР ІВАНОВИЧ, UA, ШУЛЯК ВОЛОДИМИР МИКОЛАЙОВИЧ, UA, БОГАЄНКО МИКОЛА ВОЛОДИМИРОВИЧ, UA, ПОПКОВ ВОЛОДИМИР СЕРГІЙОВИЧ, UA (73) ЗАКРИТЕ АКЦІОНЕРНЕ ТОВАРИСТВО "ІНТЕР-МЕД-ПРОМ", UA (56) UA 15734, 17.07.2006 SU 1389832, 23.04.1988 SU 1023573, 15.06.1983 WO 95/29273, 02.11.1995 SU 1713634, 23.02.1992 SU 1103897, 23.07.1984 JP 62298434, 25.12.1987 JP 62102824, 13.05.1987 C2 1 3 Поставлена мета вирішується тим, що в лінійному індукційному апараті, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що є кришкою завантажувального вікна і має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб і в якій розміщені феромагнітні робочі частки, камера в нижній частині внутрішнього об'єму обладнана дистанційним елементом з електропровідним покриттям зі сторони робочого об'єму камери, на кожній з подовжніх кінцевих частин дистанційного елементу змонтовано по ряду стійок, між якими на середині висоти робочого об'єму камери паралельно подовжній вісі камери встановлено струни з електропровідного матеріалу, при цьому струни, електропровідне покриття дистанційного елементу та корпус камери електрично з'єднані між собою і контуром заземлення. В порівнянні з прототипом, запропонований лінійний індукційний апарат відрізняється наявністю таких ознак: - камера обладнана дистанційним елементом; - дистанційний елемент розміщений всередині камери; - дистанційний елемент розміщений в нижній частині камери; - дистанційний елемент має електропровідне покриття; - електропровідне покриття дистанційного елементу направлено в сторону робочого об'єму камери; - на кінцевій частині дистанційного елементу змонтовані стійки; - стійки змонтовані на кожній з подовжніх кінцевих частин; - розміщення стійок рядове; - між рядами стійок розміщено струни; - струни виконані з електропровідного матеріалу; - струни встановлено паралельно подовжній вісі камери; - струни встановлено на середині висоти робочого елементу камери; - струни, електропровідне покриття дистанційного елементу та корпус камери електрично з'єднані між собою; - струни, електропровідне покриття дистанційного елементу та корпус камери електрично з'єднані з контуром заземлення; Всі вищезгадані ознаки, кожна окремо і в сукупності забезпечують досягнення поставленої мети. Суть винаходу пояснюється кресленнями. На Фіг.1 показано загальний вигляд з розрізом лінійного індукційного апарату; на Фіг.2 - індукційний апарат з торця; на Фіг.3 - складові частини робочої камери; на Фіг.4 - переріз робочої камери; на Фіг.5 - загальний вихід дистанційного елементу; на Фіг.6 - схема з'єднання струн, електропровідного покриття дистанційного елементу і корпуса камери з контуром заземлення. Лінійний індукційний апарат складається з індукторів 1 з обмотками 2 жорстко встановлених в корпусі 3. Між індукторами 1 розміщується робоча 86108 4 камера 4 з феромагнітними частками 5 для обробки матеріалів. Для управління роботою апарата слугують елементи управління 6 і контролю 7. Тепловий режим роботи підтримується системою дуття, яка включає в себе вентилятор 8, раструби 9 і вентиляційні вікна 10. Робоча камера 4 виконана з немагнітного матеріалу з заокругленими боковими стінками 11 і глухою задньою стінкою 12. Торець камери 4 закінчується фланцем 13. Передня торцева стінка 14 знімна і являється кришкою завантажувального вікна 15. До торцевої стінки 14 зі сторони завантажувального вікна 15 кріпиться ущільнюючий елемент 16, з протилежної - ручка 17. Торцева стінка 14 кріпиться до торця камери 4 за допомогою фігурних скоб 18, розхил а (Фіг.3) яких дорівнює сумі товщин фланця 13, передньої торцевої стінки 14 з ущільнюючим елементом 16. В робочому положенні фігурні скоби 18 фіксуються кріпильними елементами 19. Камера 4 в нижній частині внутрішнього об'єму обладнана дистанційним елементом 20. Дистанційний елемент виконаний з немагнітного електроізоляційного матеріалу з електропровідним покриттям 21. Покриття 21 направлене в сторону робочого об'єму камери. Форма дистанційного елемента 20 повторює форму нижньої частини камери 4, а сам дистанційний елемент 20 щільно прилягає до камери 4. Товщина дистанційного елементу 20 визначається таким чином, щоб компенсувати вплив сил тяжіння на феромагнітні частки 5 при роботі лінійного індукційного апарату; при цьому продукт оброблюється рівномірно по всій зоні камери. Покриття 21 виконується відомими методами: гальванічним, напиленням, наклеюванням плівки і т. п. Товщина покриття 21 вибирається мінімальною, вона забезпечує надійний електричний контакт і мінімально впливає на екранування магнітного поля. На кожній з кінцевих подовжніх частин 22 дистанційного елементу 20 встановлено по ряду стійок 23, між стійками 23 змонтовані паралельно подовжньої вісі 24 камери 4 струни 25. Струни 25 виконані з електропровідного матеріалу. Стійки 23 мають таку висоту, щоб забезпечити монтаж струн 25 на середині висоти h робочого об'єму камери 4, тобто h/2. Струни 25, електропровідне покриття 21 дистанційного елементу 20, а також корпус камери 4 електрично з'єднані між собою і контуром заземлення електричним з'єднанням 27. Робота з лінійним індукційним апаратом виконується наступним чином. В камеру 4 через завантажувальне вікно 15 установлюється дистанційний елемент 20 з попередньо змонтованими стійками 23, струнами 25 і кріпиться в нижній частині відомими методами. Струни 25, електропровідне покриття 21 і корпус камери 4 електрично з'єднують між собою. Після цього в камеру 4 вводиться необхідна кількість матеріалу, який обробляється, і феромагнітних часток 5. Завантажувальне вікно 15 закривається торцевою стінкою 14. Для цього торцева стінка 14 з ущільнюючим елементом 16 приєднується до торця камери 4 фігурними скобами 18, які заводяться зі сторони заокруглених бокових стінок 11 камери 4 і фіксуються кріпильними еле 5 ментами 19, стискуючи при цьому ущільнюючі елементи 16. Робоча камера 4 установлюється в корпус 3 індукційного апарату між індукторами 1. Корпус камери 4 гнучким провідником електрично з'єднується з контуром заземлення. Після цього на індуктори 1 схемою управління 6 подається напруга. В залежності від характеру обробляємого матеріалу, часу обробки і інших факторів під час роботи апарата може включатися система дуття 8, 9, 10. Під дією вихорового магнітного поля індукторів 1 феромагнітні частки 5 приводяться в обертовий рух. При цьому феромагнітні частки 5 взаємодіють з обробляємим матеріалом перемішуючи його і подрібнюючи. За рахунок взаємодії тертя, електромагнітного поля і інших факторів деякі обробляємі матеріали електризуються, що приводить до їх злипання. Так як в зоні обробки матеріалу знаходиться дистанційний елемент 20 з заземленими покриттям 21 і струнами 25, то електростатичні заряди з робочих феромагнітних часток 5 і обробляємого матеріалу стікають через струни 25, покриття 21 і корпус камери 4 в контур заземлення 26. Так як струни 25 знаходяться на середині висоти h робочого об'єму камери 4, тобто в зоні максимуму дії кількох факторів (інтенсивності вихорового магнітного поля, впливу поля на обробляємий матеріал та ступінь його електризації), то знімання електростатичних зарядів виконується безпосередньо під час обробки матеріалів. 86108 6 Після завершення обробки матеріалу апарат відключається від напруги, камера 4 виводиться з апарата. Кріпильні елементи 19 відпускаються, фігурні скоби 18 виводяться з зачеплення з фланцем 13 і торцевою стінкою 14. Оброблений матеріал через завантажувальне вікно вільно виводиться з камери і направляється далі у відповідності до технологічного процесу. Таким чином, за рахунок обладнання камери 4 дистанційним елементом 20 можливо зменшити вплив сил тяжіння на феромагнітні частки 5 і рівномірно оброблювати матеріали по всій зоні камери. За рахунок використання заземлених струн 25 і покриття 21 можлива обробка діа-, пара-та феромагнітних матеріалів і їх сумішей, що значно розширює функціональні можливості апарату, а також дозволяє поліпшити якісні показники матеріалів, які обробляються. Авторами виготовлено дослідний зразок лінійного індукційного апарату вищезазначеної конструкції для приготування шихти при виготовленні комплектуючих деталей магнітотерапевтичних пристроїв захисту ПМТ-600 „SCATUM". Бібліографічні дані джерела інформації: 1. Авторське свідоцтво СРСР №1421223, кл. Η 02 К 44/06, 1988 2. Деклараційний патент на корисну модель №15734, МПК Η02К44/06, В01F5/06, Лінійний індукційний апарат, Опубл. 17.07.2006, Бюл. №7. 7 Комп’ютерна верстка В. Клюкін 86108 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear induction apparatus
Автори англійськоюOrlov Ihor Ivanovych, Shuliak Volodymyr Mykolaiovych, Bohaienko Mykola Volodymyrovych, Popkov Volodymyr Serhiiovych
Назва патенту російськоюЛинейный индукционный аппарат
Автори російськоюОрлов Игорь Иванович, Шуляк Владимир Николаевич, Богаенко Николай Владимирович, Попков Владимир Сергеевич
МПК / Мітки
МПК: H02K 44/00, B01F 5/06, B01F 13/00
Мітки: апарат, лінійний, індукційний
Код посилання
<a href="https://ua.patents.su/4-86108-linijjnijj-indukcijjnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Лінійний індукційний апарат</a>
Лінійний індукційний апарат
Номер патенту: 26240
Опубліковано: 10.09.2007
Автори: Шуляк Володимир Миколайович, Орлов Ігор Іванович, Попков Володимир Сергійович, Богаєнко Микола Володимирович
МПК: H02K 44/00, B01F 5/06
Мітки: індукційний, лінійний, апарат
Формула / Реферат:
Лінійний індукційний апарат, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що є кришкою завантажувального вікна, має форму і розміри торця камери і кріпиться до нього через ущільнювальні елементи за допомогою фігурних скоб і в якій розміщені феромагнітні робочі частки, який відрізняється тим, що камера в нижній частині внутрішнього об'єму обладнана дистанційним...
Лінійний індукційний апарат
Номер патенту: 15734
Опубліковано: 17.07.2006
Автори: Орлов Ігор Іванович, Шуляк Володимир Миколайович, Богаєнко Микола Володимирович, Попков Володимир Сергійович
МПК: B01F 5/06, H02K 44/00
Мітки: індукційний, апарат, лінійний
Формула / Реферат:
Лінійний індукційний апарат, що містить індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками, в якій розміщені феромагнітні робочі частинки, який відрізняється тим, що робоча камера містить знімну торцеву стінку, яка є кришкою завантажувального вікна, виконану подвійною, зовнішня стінка має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб, а внутрішня, до...
Лінійний індукційний апарат
Номер патенту: 80771
Опубліковано: 25.10.2007
Автори: Попков Володимир Сергійович, Шуляк Володимир Миколайович, Орлов Ігор Іванович, Богаєнко Микола Володимирович
МПК: B01F 5/06, H02K 44/00
Мітки: апарат, індукційний, лінійний
Формула / Реферат:
Лінійний індукційний апарат, що містить індуктори з обмотками, між якими встановлена робоча камера з заокругленими боковими стінками, в якій розміщені феромагнітні робочі частки, який відрізняється тим, що робоча камера має знімну торцеву стінку, яка є кришкою завантажувального вікна і виконана подвійною, зовнішня стінка має форму і розміри торця камери і закріплена до нього через ущільнювальні елементи за допомогою фігурних скоб, а...
Лінійний індукційний прискорювач
Номер патенту: 64208
Опубліковано: 15.06.2005
Автори: Гладченко Валентин Яковлевич, Гурин Анатолій Григорович, Алдакімов Олексій Сергіович, Корнілов Євген Олександрович, Ложкін Руслан Сергіович
МПК: H05H 11/00, H05H 9/00
Мітки: прискорювач, лінійний, індукційний
Формула / Реферат:
1. Лінійний індукційний прискорювач, що містить корпус, інжектор електронів, прискорюючу магнітну систему, прискорюючу трубку з ізолятором, який відрізняється тим, що його магнітна система розташована всередині корпуса та має співвісні кільцеві одиночні магнітопроводи, які розташовані вздовж осі магнітної системи та зібрані у єдину конструкцію і розміщені у магнітному полі первинного витка, при цьому внутрішнє кільце співвісного кільцевого...
Індукційний апарат
Номер патенту: 31770
Опубліковано: 25.04.2008
Автори: Богаєнко Микола Володимирович, Шуляк Володимир Миколайович, Орлов Ігор Іванович, Попков Володимир Сергійович
МПК: H02K 44/00
Мітки: апарат, індукційний
Формула / Реферат:
Індукційний апарат, що містить індукторну систему з вихровим магнітним полем, робочу камеру з немагнітного матеріалу, феромагнітні робочі тіла, які розміщені в активній зоні і взаємодіють з вихровим полем індукторної системи, який відрізняється тим, що робоча камера усередині поза активною зоною має одну чи ряд перегородок з наскрізними отворами, в центрі яких консольно защемлено, як мінімум один, пружний елемент, на вільному кінці якого...
Попередній патент: Вимірювальний прилад
Наступний патент: Пристрій для евакуації персоналу із висотних адміністративних будівель
Випадковий патент: Спосіб розведення афідофагів