Спосіб ідентифікації об’єктів керування електроприводів

Формула / Реферат
Спосіб ідентифікації об'єкта керування електроприводів, що включає визначення параметрів об'єкта керування за допомогою виміру основних електромеханічних величин з подальшим обчисленням параметрів об'єкта керування, який відрізняється тим, що визначення параметрів об'єкта керування здійснюють безпосередньо під час основної роботи електроприводу, а величину параметрів знаходять по наступних формулах:
- для електромагнітної частини двигуна без урахування зміни сФ:
![]() ;
;
![]() ,
,
де с - конструктивна постійна двигуна;
![]() - магнітний потік двигуна;
- магнітний потік двигуна;
![]() - сумарна індуктивність якірного ланцюга двигуна;
- сумарна індуктивність якірного ланцюга двигуна;
![]() - сумарний активний опір якірного ланцюга двигуна;
- сумарний активний опір якірного ланцюга двигуна;
![]() - кутова швидкість вала двигуна в момент часу і (при і = 0,1,2...);
- кутова швидкість вала двигуна в момент часу і (при і = 0,1,2...);
![]() - струм якірного ланцюга двигуна в момент часу і (при і = 0,1,2...);
- струм якірного ланцюга двигуна в момент часу і (при і = 0,1,2...);
![]() - напруга на якірному ланцюзі двигуна в момент часу і (при і =0,1,2...);
- напруга на якірному ланцюзі двигуна в момент часу і (при і =0,1,2...);
![]() - інтервал часу, значно менший постійної часу якірного ланцюга, через який відбувається вимір необхідних величин: напруги, струму і кутової швидкості вала двигуна,
- інтервал часу, значно менший постійної часу якірного ланцюга, через який відбувається вимір необхідних величин: напруги, струму і кутової швидкості вала двигуна, ![]() ;
;
- для електромагнітної частини двигуна з урахуванням зміни сФ:
![]() ;
;
![]() ;
;
 ;
;
- для електромеханічної частини електроприводу:
![]() ;
;
![]() ,
,
де ![]() - сумарний момент інерції, приведений до вала двигуна.
- сумарний момент інерції, приведений до вала двигуна.
![]() - статичний струм двигуна.
- статичний струм двигуна.
Текст
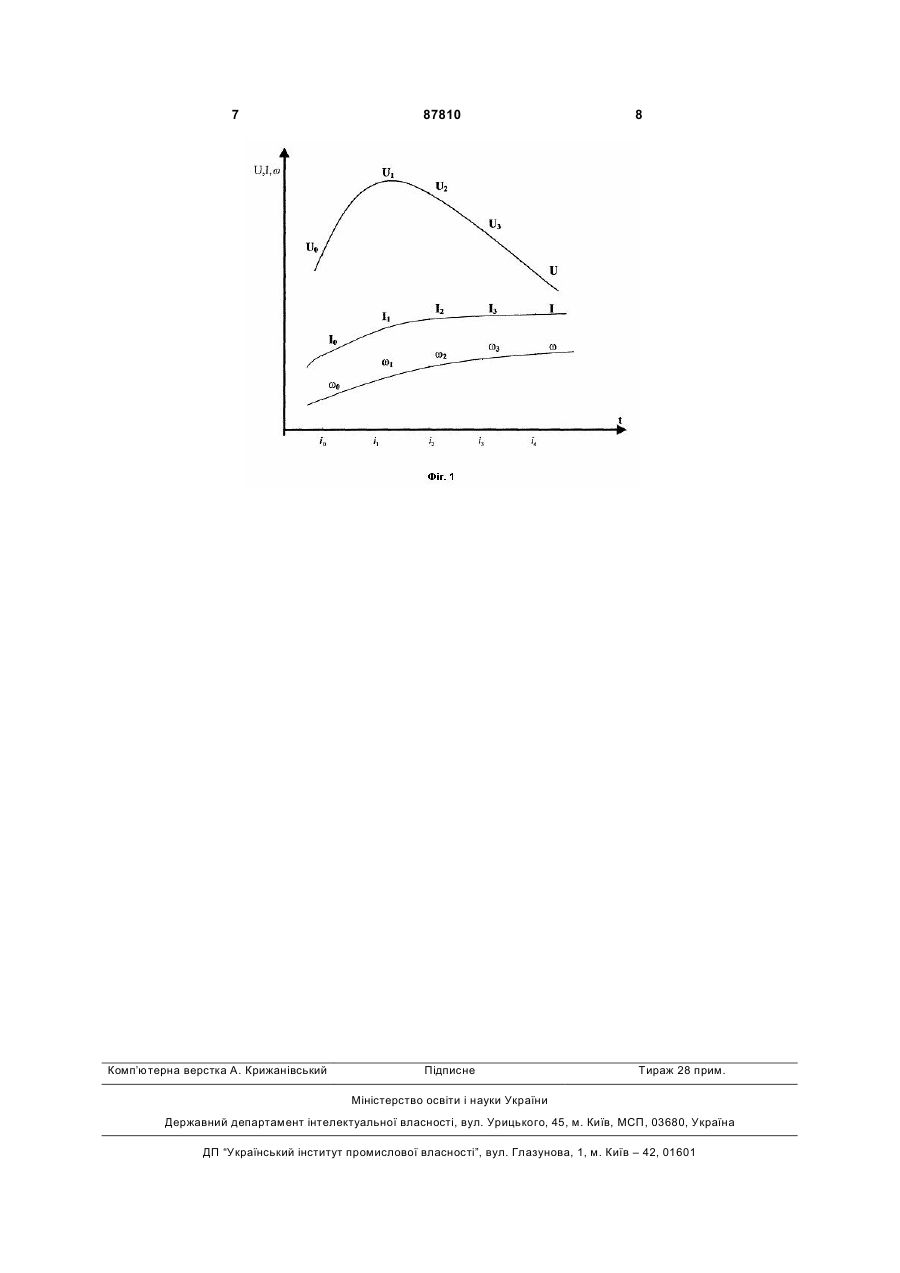
Спосіб ідентифікації об'єкта керування електIi - струм якірного ланцюга двигуна в момент часу роприводів, що включає визначення параметрів і (при і = 0,1,2...); об'єкта керування за допомогою виміру основних Ui - напруга на якірному ланцюзі двигуна в моелектромеханічних величин з подальшим обчисленням параметрів об'єкта керування, який відрімент часу і (при і =0,1,2...); зняється тим, що визначення параметрів об'єкта Dt - інтервал часу, значно менший постійної часу керування здійснюють безпосередньо під час осякірного ланцюга, через який відбувається вимір новної роботи електроприводу, а величину паранеобхідних величин: напруги, струму і кутової метрів знаходять по наступних формулах: швидкості вала двигуна, - для електромагнітної частини двигуна без ураху= i1 - i0 i2 - i1 i3 - i2 K in - in -1 ; = = Dt = вання зміни сФ: - для електромагнітної частини двигуна з урахуванням зміни сФ: C2 2 (19) 1 3 87810 Винахід відноситься до електропривода постійного струму, що регулюється, зокрема до приводів з високими вимогами до якості регулювання. Відомий спосіб ідентифікації об'єктів керування електроприводів, у якому визначення параметрів об'єкта керування відбувається за допомогою виміру основних електромеханічних величин і подальшим обчисленням параметрів об'єкта керування (Проблемы автоматизированного электропривода. Теория и практика: [Труды конференции] / Под общей редакцией В. Б. Клепикова, Л. В. Акимова. -Харьков: Основа, 1997,68-69 с). Недоліком цього способу є неможливість визначення сумарного опору якірного ланцюга двигуна R і сумарної індуктивності якірного ланцюга двигуна L під час основної роботи електропривода, для їхнього визначення необхідне загальмування двигуна. В основу винаходу поставлена задача удосконалити спосіб ідентифікації об'єктів керування електроприводів, у якому за рахунок визначення параметрів об'єкта керування без зупинки двигуна досягається ідентифікація об'єкта керування під час основної роботи електропривода. Поставлена задача досягається тим, що в способі ідентифікації об'єкта керування електроприводів, що включає визначення параметрів об'єкта керування за допомогою виміру основних електромеханічних величин з подальшим обчисленням параметрів об'єкта керування, згідно з винаходом, визначення параметрів об'єкта керуван 4 ня відбувається безпосередньо під час основної роботи електроприводу, а величину параметрів знаходять по наступним формулах: - для електромагнітноїчастини двигуна без урахування зміни сФ: - Ui +1Ii +1 + cФwi + 2Ii +1 - cФwi +1Ii + 2 ; I U L = D t i + 2 i +1 Ii +12 - Ii + 2Ii Ui +1Dt - сФwi +1Dt - L(Ii +1 - Ii ) , Ii +1Dt де с - конструктивна постійна двигуна; Ф - магнітний потік двигуна; L - сумарна індуктивність якірного ланцюга двигуна; R - сумарний активний опір якірного ланцюга двигуна. wі - кутова швидкість вала двигуна в момент часу і (при і = 0,1,2...); Іi - струм якірного ланцюга двигуна в момент часу і (при і = 0,1,2...); Ui - напруга на якірному ланцюзі двигуна в момент часу і (при і =0,1, 2...); Dt - інтервал часу значно менший постійної часу якірного ланцюга, через який відбувається виміру необхідних величин: напруги, струму і кутової швидкості вала двигуна. Dt = і1 – і0 = І2 – і1 = і3 – І2 = ...іn-іn-1 - для електромагнітної частини двигуна з урахуванням зміни сФ: R= - Ui + 3wi + 2Ii +1 + Ui + 2Ii +1wi + 3 - Ui + 2Ii + 3wi +1 + Ui +1Ii + 3wi + 2 - Ui +1Ii + 2wi + 3 U w I ; L = Dt i +1 i+1i + 2 wi + 3Ii + 2Ii - wi + 3Ii +12 + wi + 2Ii +1Ii + 2 - wi + 2Ii + 3Ii + wi +1Ii + 3Ii +1 - wi +1Ii + 2 U w Dt - Ui + 2wi +1Dt + L(Ii + 2 - Ii +1)wi +1 - L(Ii +1 - Ii )wi + 2 R = i +1 i + 2 ; Ii +1wi + 2Dt - Ii + 2wi +1Dt (I - I ) Ui +1 - Ii +1R - L i +1 i Dt сФ = wi +1 - для електромеханічної частини електропривода: - wi +1)(Ii + 2 - Ii +1) (w ; Ic = Ii + 2 - i + 2 wi + 2 _ wi - 2wi +1 J (I - I )Dt = i +1 c , сФ (wi +1 - wi ) Де J - сумарний момент інерції, приведений до вала двигуна. усе це дозволяє ідентифікувати об'єкт керування під час основної роботи електропривода. Рівняння, що описують динаміку електроприводу у випадку двигуна постійного струму з незалежним збудженням, мають вид: - wi +1)(Ii + 2 - Ii +1) (w Ic = Ii + 2 - i + 2 (1) wi + 2 _ wi - 2wi +1 J dw I = IC + (2) сФ dt де U - напруга на якорі двигуна; с - конструктивна постійна двигуна; Ф - магнітний потік двигуна; w - кутова швидкість обертання валу двигуна; І - струм якірної обмотки двигуна; R - сумарний активний опір якірної обмотки двигуна; L - сумарна індуктивність якірної обмотки двигуна; Iс- статичний струм якоря двигуна; J- сумарний момент інерції, приведений до вала двигуна. Для визначення параметрів електромагнітної частини двигуна використовуємо рівняння 1. Якщо немає необхідності у визначенні величини сФ в електромагнітній частині двигуна визначаються тільки два параметри R і L. Обчислення цих параметрів зводиться до рішення системи з двох рівнянь складеної виходячи з рівняння 1 і Фіг.1: dI1 ì (3) ïU1 = СФw1 + I1R + L Dt ; ï í (4) ïU = СФw + I R + L dI2 . 2 2 ï 2 Dt î Заміняючи в рівнянні 3 і 4 похідні на збільшення, одержимо: 5 87810 I1 - I0 ì (5) ïU1 = СФw1 + I1R + L Dt ; ï í ïU = СФw + I R + L I2 - I1 . (6) 2 2 ï 2 Dt î Вирішуючи рівняння 5 і 6 відносно L і R, одержимо: I U - U 2 I1 + c Ф w 2 I1 - c Ф w 1 I 2 ; L = D t i+ 2 1 (7) 2 I1 - I2 I0 U Dt - сФw1Dt - L(I1 - I0 ) R= 1 (8) I1Dt При необхідності визначення параметрів R, L і параметра сФ необхідно скористатися результа том рішення системи з трьох рівнянь, складеної по Фіг.1 і рівнянню 1 і представленої нижче: dI1 ì (9) ïU1 = сФw1 + I1R + L dt ; ï dI2 ï ; íU2 = сФw2 + I2R + L (10) dt ï ï dI3 . ïU3 = сФw3 + I3R + L dt î (11) Замінивши похідні в рівняннях 9,10, 11 на збільшення, як це зроблено було вище в рівняннях 3 і 4 і вирішивши рівняння відносно сФ, R і L одержимо: U w I - U3w1I2 + U2I1w3 - U2I3w1 + U1I3w2 - U1I2w3 L = Dt 3 1 2 ; w3I2I0 - w3I12 + w2I1I2 - w2I3I0 + w1I3I1 - w1I22 U w Dt - U2w1Dt + L(I2 - I1)w1 - L(I1 - I0 )w2 R = i1 2 ; I1w2 Dt - I2w1Dt (I - I ) U1 - I1R - L 1 0 (14) Dt сФ = w1 Для визначення параметрів електромеханічної частини двигуна використовуємо рівняння 2 і Фіг.1, по яких складемо систему з двох рівнянь, вирішиJ вши яку, одержимо IC і : сФ J dw1 ì (15) ïI1 = IC + сФ dt ; ï í ïI = I + J dw2 . (16) ï 2 C сФ dt î Замінивши в рівняннях 15 і 16 похідні на збільшення і вирішивши систему рівнянь відносно IC і J , одержимо: сФ ( w - w1)(I2 - I1) IC = I2 - 2 (17) w2 + w0 - 2w1 J (I - I )Dt = 1 C (18) сФ w1 - w0 На Фіг.1 зображені умовні перехідні процеси напруги на якорі двигуна U, струму якоря І і кутової швидкості вала двигуна w. Спосіб ідентифікації об'єктів керування електроприводів, здійснюється таким чином. 6 (12) (13) Через рівні проміжки часу Dt (величина яких значно меньше величини постійної часу якірного ланцюга) відбувається вимір основних електромагнітних величин двигуна: напруга на якірній обмотці U, струму якірної обмотки двигуна І, кутової швидкості обертання вала двигуна w під час основної роботи електропривода. Далі за результатами зроблених вимірів і формулам 7, 8, 12, 13,14, 17, 18 відбуваються обчислення шуканих величин: R - сумарного опору якірного ланцюга; L - сумарної індуктивності якірного ланцюга; ІC - статичний струм двигуна; J коефіцієнт, рівний зворотному інтегральсФ ний электро- механічному коефіцієнту зв'язку струму якоря двигуна і кутової швидкості двигуна c ×Ф (w = ò × Idt ) ; J сФ - пропорційного коефіцієнта зв'язку кутової швидкості двигуна і EPC(Е = cФw). Використання пропонованого винаходу дозволить визначити сумарний опір якірного ланцюга двигуна R і сумарну індуктивність якірного ланцюга двигуна L під час основної роботи електропривода без необхідності загальмування двигуна. 7 Комп’ютерна верстка А. Крижанівський 87810 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for identification of objects of control of electric drives
Автори англійськоюSilchenko Eduard Yevhenovych
Назва патенту російськоюСпособ идентификации объектов управления электроприводов
Автори російськоюСильченко Эдуард Евгеньевич
МПК / Мітки
МПК: G01R 31/34
Мітки: керування, ідентифікації, електроприводів, спосіб, об'єктів
Код посилання
<a href="https://ua.patents.su/4-87810-sposib-identifikaci-obehktiv-keruvannya-elektroprivodiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації об’єктів керування електроприводів</a>
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів
Номер патенту: 32089
Опубліковано: 12.05.2008
Автори: Файнштейн Вілен Григорович, Цвітнов Віталій Олександрович
МПК: H02P 5/00
Мітки: постійного, станів, керування, електроприводом, струму, електроприводів, головних, цифрового, спосіб, прокатних
Формула / Реферат:
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів, що містить обчислювальний пристрій, що забезпечує регулювання струму й швидкості обертання якоря двигуна шляхом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом) інформації в (з) обчислювального пристрою, який відрізняється тим, що визначення...
Пристрій для керування гальмуванням електроприводів кранових механізмів

Номер патенту: 53022
Опубліковано: 15.01.2003
Автори: Будіков Леонід Якович, Аветісян Сергій Манукович, Нєженцев Олексій Борисович
МПК: H02P 3/18, B66C 13/22
Мітки: кранових, механізмів, пристрій, керування, електроприводів, гальмуванням
Формула / Реферат:
1. Пристрій для керування гальмуванням електроприводів кранових механізмів, що містить асинхронний електродвигун з фазним ротором, кінематично зв'язаний з виконавчим механізмом, наприклад механізмом пересування крана або вантажного візка, трифазний випрямляч і резистори в ланцюзі ротора електродвигуна, релейний блок управління, вхід якого підключений до виходу трифазного випрямляча в ланцюзі ротора, а вихід - до входу керованого...
Спосіб керування крутним моментом двигуна
Номер патенту: 41715
Опубліковано: 17.09.2001
Автор: ІЛЬЧУК АНДРІЙ ІВАНОВИЧ
МПК: F02D 37/00
Мітки: моментом, керування, крутним, двигуна, спосіб
Формула / Реферат:
Спосіб керування крутним моментом двигуна шляхом змінювання тиску згоряння паливної суміші, який відрізняється тим, що змінювання тиску згоряння здійснюють збільшенням кількості циліндрів двигуна, які одночасно виконують такт "робочий хід" під час його роботи і/або зниженням частоти тактів "робочий хід", що виконують циліндри із зростанням числа обертів вала двигуна.
Спосіб прямого мікропроцесорного керування випрямлячем за обчислювальними прогнозами
Номер патенту: 27549
Опубліковано: 12.11.2007
Автори: Домнін Ігор Феліксович, Сокол Євгеній Іванович, Іванов Олександр Євгенійович, Кіяшко Борис Олександрович, Тимченко Микола Олександрович, Сунанто ..., Бахнов Леонід Євгенійович
МПК: H02M 7/00
Мітки: мікропроцесорного, обчислювальними, прямого, прогнозами, керування, випрямлячем, спосіб
Формула / Реферат:
1. Спосіб керування тиристорним перетворювачем за обчислювальними прогнозами, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють протиерс навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що величину струму навантаження, що задається на наступний інтервал провідності, визначають під час комутації на...
Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об’єкту
Номер патенту: 28769
Опубліковано: 25.12.2007
Автори: Кіяшко Борис Олександрович, Тимченко Микола Олександрович, Сокол Євгеній Іванович, Сунанто ..., Іванов Олександр Євгенійович, Бахнов Леонід Євгенійович, Домнін Ігор Феліксович
МПК: G05B 13/04, H02M 7/155, H02P 7/06
Мітки: об'єкту, випрямлячем, моделі, двигун, прогнозуючого, спосіб, навантаженого, керування
Формула / Реферат:
1. Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об'єкта, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють проти ЕРС навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що момент подачі імпульсів керування визначається шляхом циклічного розрахунку функціонала на кожному...
Попередній патент: Застосування каталізатора для розкладання n2o при здійсненні способу оствальда та пристрій для розкладання n2o при здійсненні способу оствальда
Наступний патент: Спосіб виготовлення перукарських ножиць, а також перукарські ножиці
Випадковий патент: Багатошарове полімерне покриття металевих труб