Спосіб виставлення осей чутливості акселерометрів
Номер патенту: 91315
Опубліковано: 12.07.2010
Автори: Киричук Юрій Володимирович, Подчашинський Юрій Олександрович, Ткаченко Світлана Сергіївна, Безвесільна Олена Миколаївна, Остапчук Анна Анатоліївна, Кондратюк Жанна Михайлівна
Формула / Реферат
Спосіб виставлення осей чутливості акселерометрів, який включає встановлення акселерометра на гіростабілізовану платформу з орієнтацією його в просторі за допомогою риски, що нанесена на корпус акселерометра та вказує напрямок його осі чутливості, який відрізняється тим, що на гіростабілізовану платформу додатково встановлюють два акселерометри, орієнтуючи їх осі чутливості паралельно координатним осям тривимірної системи координат, пов'язаної з гіростабілізованою платформою, за допомогою рисок, нанесених на корпус кожного з акселерометрів, далі гіростабілізовану платформу з трьома акселерометрами встановлюють на обертовий стіл кутовимірювального пристрою, за допомогою якого визначають відхилення трьох взаємно перпендикулярних осей чутливості акселерометрів від координатних осей тривимірної системи координат, потім визначають відхилення від вертикального та горизонтального положення кожної з рисок, нанесених на корпуси акселерометрів, шляхом формування відеокамерою зображення цих рисок, подачі отриманих зображень в електронну обчислювальну машину (ЕОМ) та їх лінійної апроксимації, після чого за допомогою ЕОМ формують поправки, які використовують для корекції просторового положення осей чутливості акселерометрів.
Текст
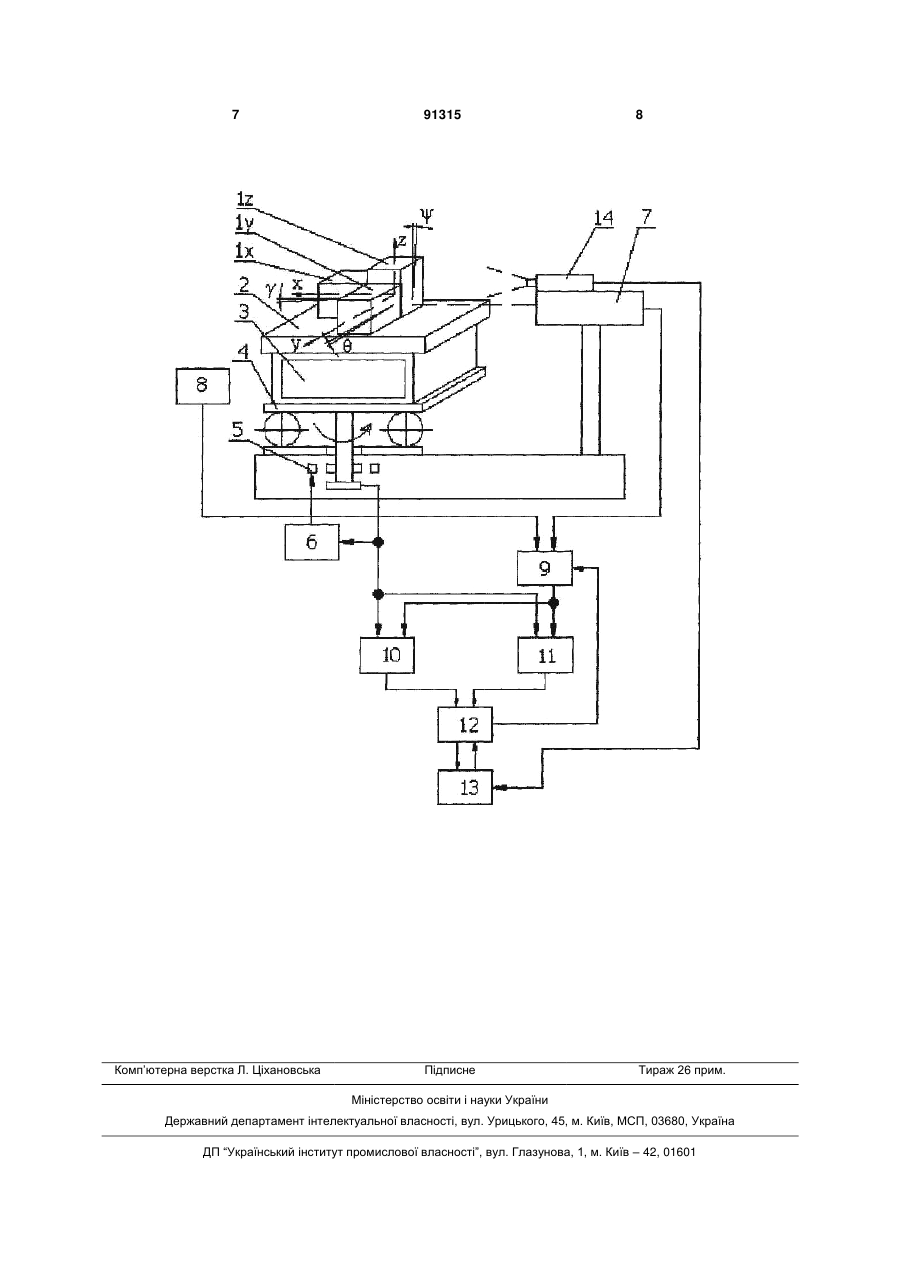
Спосіб виставлення осей чутливості акселерометрів, який включає встановлення акселерометра на гіростабілізовану платформу з орієнтацією його в просторі за допомогою риски, що C2 2 (19) 1 3 чають встановлення акселерометра на гіростабілізовану платформу з орієнтацією його в просторі за допомогою риски, що нанесена на корпус акселерометра та вказує напрямок його осі чутливості. Проте, на відміну від способу-винаходу, в способі-прототипі вісь чутливості кожного з акселерометрів виставляється окремо. Це виконується шляхом орієнтації заданим чином кожного з акселерометрів у тривимірному просторі за допомогою риски при встановленні цих акселерометрів на ГСП. При цьому мають місце похибки, що виникають під час встановлення і закріплення акселерометрів на ГСП. Ці похибки суттєво знижують як точність виставлення осі чутливості кожного з акселерометрів окремо, так і точність забезпечення взаємного розташування осей чутливості трьох акселерометрів, які повинні бути взаємно перпендикулярними. В способі-прототипі відсутні заходи, спрямовані на компенсацію вказаних похибок. Таким чином, спосіб-прототип має низьку точність виставлення в тривимірному просторі осей чутливості акселерометрів і, як наслідок, виникає суттєве зниження точності вимірювання прискорень в інерціальній навігаційній системі або в гравіметричній системі. В основу винаходу поставлена задача удосконалення способу виставлення осей чутливості акселерометрів, щоб забезпечити підвищення точності виставлення в тривимірному просторі осей чутливості акселерометрів і, як наслідок, суттєве підвищення точності вимірювання прискорень в інерціальній навігаційній системі або точності вимірювання аномалій прискорення сили тяжіння гравіметричною системою. Поставлена задача вирішується шляхом того, що на ГСП встановлюють ще два акселерометри, орієнтуючи їх осі чутливості паралельно координатним осям тривимірної системи координат, пов'язаної з ГСП, за допомогою рисок, нанесених на корпус кожного з акселерометрів, далі ГСП з трьома акселерометрами встановлюють на обертовий стіл кутовимірювального пристрою, за допомогою якого визначають відхилення трьох взаємно перпендикулярних осей чутливості акселерометрів від координатних осей тривимірної системи координат, потім визначають відхилення від вертикального та горизонтального положення кожної з рисок, нанесених на корпуси акселерометрів, шляхом формування відеокамерою зображення цих рисок, подачі отриманих зображень в електронну обчислювальну машину (ЕОМ) та їх лінійної апроксимації, після чого за допомогою ЕОМ формують поправки, які використовують для корекції просторового положення осей чутливості акселерометрів. Підвищення точності виставлення осі чутливості кожного з акселерометрів окремо в способівинаході забезпечується шляхом того, що визначають відхилення від вертикального та горизонтального положення кожної з рисок, нанесених на корпуси акселерометрів. При цьому риска вказує напрямок осі чутливості акселерометра, а відеокамера та ГСП мають задану високоточну орієнтацію в тривимірному просторі. Для підвищення точ 91315 4 ності визначення кутового положення риски використовується лінійна апроксимація її зображення, наприклад за методом найменших квадратів [3]. Така апроксимація забезпечує суттєве підвищення точності вимірювань координат об'єктів та кутових величин. Таким чином, забезпечується високоточне визначення відхилення осі чутливості кожного з акселерометрів від вертикального та горизонтального положення з подальшим формуванням поправок, що використовуються для корекції просторового положення осей чутливості акселерометрів. Підвищення точності взаємного розташування осей чутливості трьох акселерометрів забезпечується шляхом того, що на ГСП встановлюють три акселерометри, орієнтуючи їх осі чутливості паралельно координатним осям тривимірної системи координат, пов'язаної з ГСП, за допомогою рисок, нанесених на корпус кожного з акселерометрів. ГСП встановлюють на обертовий стіл кутовимірювального пристрою, за допомогою якого визначають відхилення трьох взаємно перпендикулярних осей чутливості акселерометрів від координатних осей тривимірної системи координат. При цьому кутовимірювальний пристрій, наприклад, з кільцевим лазером забезпечує високоточне визначення взаємного розташування трьох акселерометрів на ГСП. На цій основі ЕОМ обчислює поправки, що використовуються для корекції просторового положення осей чутливості акселерометрів. Таким чином, спосіб-винахід забезпечує підвищення точності виставлення у тривимірному просторі осей чутливості акселерометрів і, як наслідок, суттєве підвищення точності вимірювання прискорень в інерціальній навігаційній системі або точності вимірювання аномалій прискорення сили тяжіння гравіметричною системою. Спосіб-винахід виконують в такій послідовності: 1. На ГСП встановлюють три акселерометри, орієнтуючи їх осі чутливості паралельно координатним осям тривимірної системи координат, пов'язаної з ГСП. Ця дія виконується за допомогою рисок, нанесених на корпус кожного з акселерометрів. 2. ГСП з трьома акселерометрами встановлюють на обертовий стіл кутовимірювального пристрою, за допомогою якого визначають відхилення трьох взаємно перпендикулярних осей чутливості акселерометрів від координатних осей тривимірної системи координат. Вказані відхилення характеризують похибки взаємного розташування осей чутливості трьох акселерометрів, що повинні бути взаємно перпендикулярними. 3. Визначають відхилення від вертикального та горизонтального положення кожної з рисок, нанесених на корпус акселерометрів. Ця дія виконується шляхом формування відеокамерою зображення цих рисок, подачі отриманих зображень в ЕОМ та їх лінійної апроксимації. Вказані відхилення характеризують похибки виставлення осі чутливості кожного акселерометра в площині, перпендикулярній осі оптичної системи відеокамери. 4. За допомогою ЕОМ формують поправки, які використовують для корекції просторового поло 5 ження осей чутливості акселерометрів, визначені в п. 2 і п. 3. Корекція просторового положення осей чутливості та їх виставлення може виконуватися шляхом корекції просторового положення ГСП (виставлення осей чутливості за допомогою технічних засобів) та/або шляхом корекції результатів вимірювань прискорень в ЕОМ (алгоритмічне виставлення осей чутливості). Спосіб-винахід пояснюється кресленням, де зображено пристрій, що реалізує цей спосіб. Пристрій містить: три акселерометри 1х, 1y, 1z з нанесеними на їх корпуси рисками, ГСП 2, кутовимірювальний пристрій, ЕОМ 13 та відеокамеру 14. Кутовимірювальний пристрій містить кільцевий лазер 3, обертовий стіл 4, електродвигун 5, блок 6 керування електродвигуном, фотоелектричний автоколіматор 7, блок 8 прив'язки, блок 9 селекції імпульсів, перший та другий лічильники 10 і 11, пристрій 12 зв'язку з ЕОМ, Пристрій працює наступним чином. Три акселерометри 1х, 1y, 1z з нанесеними на їх корпуси рисками встановлено на ГСП 2, що має горизонтальне положення у тривимірному просторі. Осі чутливості акселерометрів їх і 1у мають горизонтальне положення у тривимірному просторі, акселерометру 1z - вертикальне положення. При цьому осі чутливості акселерометрів 1х, 1y, 1z є взаємно перпендикулярними та виставлені з похибками , , , які необхідно компенсувати. ГСП 2 з акселерометрами 1х, 1y, 1z та кільцевий лазер 3 встановлені на обертовому столі 4 таким чином, щоб акселерометри 1х, 1y, 1z знаходились в зоні дії автоколіматора 7 та відеокамери 14. Обертовий стіл 4 обертається з постійною кутовою швидкістю за допомогою електродвигуна 5. Керування електродвигуном 5 здійснюється за допомогою блока 6 керування електродвигуном. Відхилення осей чутливості акселерометрів 1х, 1y, 1z від взаємно перпендикулярного положення визначають за допомогою методу лазерної гоніометрії [4, С.17-21]. Для цього під час повороту обертового стола 4 за допомогою автоколіматора 7 визначають зовнішній кут між корпусами акселерометрів. Біля ГСП 2 встановлено фотоелектричний автоколіматор 7, закріплений так, що його оптична вісь знаходиться перпендикулярно граням корпусів акселерометрів 1х, 1y, 1z. При обертанні акселерометрів 1х, 1y, 1z на обертовому столі 4 від грані кожного корпусу акселерометрів 1х, 1y, 1z на виході фотоелектричного автоколіматора 7 отримують електричні імпульси, що надходять на вхід блоку 9 селекції імпульсів. Необхідний сигнал селекції першої грані корпусу акселерометра 1z 91315 6 отримують від блоку 8 прив'язки. Цей сигнал також надходить на вхід блоку 9 селекції імпульсів. За цим сигналом блок 9 селекції імпульсів виділяє імпульс, сформований фотоелектричним автоколіматором 7 від першої грані акселерометра 1z. Цим імпульсом вмикається перший лічильник 10, який підраховує число періодів сигналу, що надходить від кільцевого лазеру 3. Імпульс від наступної грані, що належить корпусу акселерометра 1у, вимикає перший лічильник 10 та вмикає другий лічильник 11. Тим самим закінчується підрахунок числа періодів сигналу кільцевого лазеру 3, що відповідає виміряному куту між гранями акселерометрів 1z і 1у. Надходження імпульсів від фотоелектричного автоколіматора 7 вмикає один (перший або другий) з лічильників 10 і 11 та вимикає інший. Інформація з першого та другого лічильників 10 і 11 через пристрій 12 зв'язку з ЕОМ надходить у ЕОМ 13. ЕОМ 13 обробляє ці дані та формує поправки, які використовують для корекції просторового положення осей чутливості акселерометрів 1х, 1y, 1z. За допомогою відеокамери 14 формують зображення рисок на корпусах акселерометрів 1х, 1y, 1z. Зображення рисок містять вимірювальну інформацію про відхилення осей чутливості в площині, перпендикулярній осі оптичної системи відеокамери 14. Зображення рисок надходять у ЕОМ 13, яка виконує лінійну апроксимацію цих зображень за методом найменших квадратів та формує поправки. Ці поправки також використовуються для корекції просторового положення осей чутливості акселерометрів 1х, 1y, 1z. Таким чином, забезпечується високоточне виставлення осей чутливості трьох акселерометрів 1х, 1y, 1z у тривимірному просторі і, як наслідок, підвищується точність інерціальної навігаційної системи або точність гравіметричної системи. Література: 1. Безвесільна О.М. Виставка вимірювальних осей акселерометрів // Вісник ЖДТУ. - 2007. - №3 (42). - С.46-55. 2. Безвесільна О.М. Вимірювання прискорень. Підручник. - К.: Либідь, 2001. - 264с. 3. Яцук В.О., Малачівський П.С. Методи підвищення точності вимірювань: Підручник. - Львів: Видавницво "Бескид Біт", 2008. - 368с. 4. Безвесільна О.М.. Киричук Ю.В., Ткаченко С.С. Аналіз похибки вимірювання кутів з використанням методу калібрування // Восточноевропейский журнал передовых технологий. - 2008. - №6/5 (36). - С.17-21. 7 Комп’ютерна верстка Л. Ціхановська 91315 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adjustment of sensitivity axes of accelerometers
Автори англійськоюBezvesilna Olena Mykolaivna, Podchashynskyi Yurii Oleksandrovych, Tkachenko Svitlana Serhiivna, Ostapchuk Anna Anatoliivna, Kondratiuk Zhanna Mykhailivna, Kyrychuk Yurii Volodymyrovych
Назва патенту російськоюСпособ выставления осей чувствительности акселерометров
Автори російськоюБезвесильна Елена Николаевна, Подчашинский Юрий Александрович, Ткаченко Светлана Сергеевна, Остапчук Анна Анатолиевна, Кондратюк Жанна Михайловна, Киричук Юрий Владимирович
МПК / Мітки
МПК: G01B 11/26, G01P 21/00
Мітки: виставлення, спосіб, осей, чутливості, акселерометрів
Код посилання
<a href="https://ua.patents.su/4-91315-sposib-vistavlennya-osejj-chutlivosti-akselerometriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб виставлення осей чутливості акселерометрів</a>
Пристрій для виставлення осі чутливості гравіметричної системи
Номер патенту: 90621
Опубліковано: 11.05.2010
Автори: Киричук Юрій Володимирович, Безвесільна Олена Миколаївна, Гнатейко Нонна Валентинівна, Подчашинський Юрій Олександрович
МПК: G01V 7/00
Мітки: системі, осі, гравіметричної, пристрій, чутливості, виставлення
Формула / Реферат:
Пристрій для виставлення осі чутливості гравіметричної системи, що містить гіростабілізовану платформу (1), на якій закріплений чутливий елемент (2) гравіметричної системи, та бортову цифрову обчислювальнумашину (3) (БЦОМ), вхід якої підключений до виходу чутливого елемента (2) гравіметричної системи, а вихід - до входу керування гіростабілізованої платформи (1), який відрізняється тим, що на корпус чутливого елемента (2) гравіметричної...
Стенд для градуювання акселерометрів
Номер патенту: 84801
Опубліковано: 25.11.2008
Автори: Маршавка Ірина Олексіївна, Троценко Олександр Володимирович
МПК: G01P 21/00
Мітки: стенд, акселерометрів, градуювання
Формула / Реферат:
Стенд для градуювання акселерометрів, який містить робочу платформу, яка обертається навколо взаємно перпендикулярних осей, і змонтований на ній вал, на якому закріплені вантажі симетрично відносно осі обертання платформи, який відрізняється тим, що вантажі виконані у вигляді площинних лопаток, закріплених на валу з можливістю повороту і фіксації навколо осей, перпендикулярних осі вала.
Відмовостійкий блок акселерометрів

Номер патенту: 36546
Опубліковано: 27.10.2008
Автори: Фірсов Сергій Миколайович, Аблаєв Тімур Асанович, Златкін Олег Юрійович, Кулік Анатолій Степанович
МПК: G01C 21/00
Мітки: відмовостійкий, блок, акселерометрів
Формула / Реферат:
Відмовостійкий блок акселерометрів, що складається з акселерометрів, три з яких розташовані у вигляді правильної трикутної піраміди, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що четвертий акселерометр розташований по діагоналі куба на відстані , де
Стенд для градуювання акселерометрів
Номер патенту: 90334
Опубліковано: 26.04.2010
Автори: Троценко Олександр Володимирович, Мішин Максим Олександрович
МПК: G01P 21/00
Мітки: градуювання, акселерометрів, стенд
Формула / Реферат:
Стенд для градуювання акселерометрів, що містить інерційну масу, встановлену в опорі й зв'язану через торсіон з мембраною й робочою платформою, розташованою на мембрані, привід, який відрізняється тим, що має порожню циліндричну камеру, торсіон, виконаний у вигляді складаної порожнистої трубки, мембрану, герметично закріплену на порожній циліндричній камері, порожнина якої з'єднана з порожниною трубки й заповнена рідиною, а трубка містить...
Відмовостійкий блок акселерометрів

Номер патенту: 47348
Опубліковано: 25.01.2010
Автори: Давидов Дмитро Володимирович, До Куок Туан, Бандура Іван Миколайович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Златкін Олег Юрійович, Федорчук Ігор Володимирович
МПК: G01C 21/00
Мітки: акселерометрів, блок, відмовостійкий
Формула / Реферат:
Відмовостійкий блок акселерометрів, що складається з трьох акселерометрів, чутливі осі двох з них співпадають з двома осями ортогональної системи координат, який відрізняється тим, що вісь третього акселерометра складає з третьою ортогональною віссю кут 60° у площині XOY, у нього додатково введені два акселерометри, осі яких спрямовані з початку координат по діагоналі куба в 2 та 4 октанти відповідно, виходи акселерометрів послідовно...
Попередній патент: Бродильно-формувальний агрегат
Наступний патент: Спосіб виготовлення шарнірів для протезно-ортопедичних виробів
Випадковий патент: Спосіб підвищення урожайності озимих зернових культур по непарових попередниках