Комп’ютерний маніпулятор, що дозволяє відчувати віртуальні предмети
Формула / Реферат
Комп'ютерний маніпулятор, який містить корпус, всередині якого знаходяться штоки та датчики положення штоків, який відрізняється тим, що маніпулятор складається з утримувача передпліччя руки та корпуса, з'єднаних шарніром з датчиком їх взаємного положення в цьому шарнірі, при цьому утримувач має дваборти для утримання передпліччя, а корпус, у порожнині між верхньою та нижньою частинами, має поперечину, до якої за допомогою важелів-джойстиків приєднані п'ять електромагнітних котушок з дротами, на ближчій до поперечини частині кожної котушки знаходиться електромагнітне реле з язичком, всередині порожнини котушки проходить шток, віддалена від поперечини його частина у кінці приєднана шарнірним з'єднанням з ковпачком, розмір та форма якого відповідає закінченню пальця людини, ця частина штока виконана із магніточутливого матеріалу, а ближча до поперечини його частина - із матеріалу, нечутливого до намагнічування, на цій частині штока знаходиться ряд поперечних проточок з шириною більше ширини язичка, також у цьому кінці штока встановлено фіксуючий пристрій, поперечина корпуса має отвори навпроти кінців штоків.
Текст
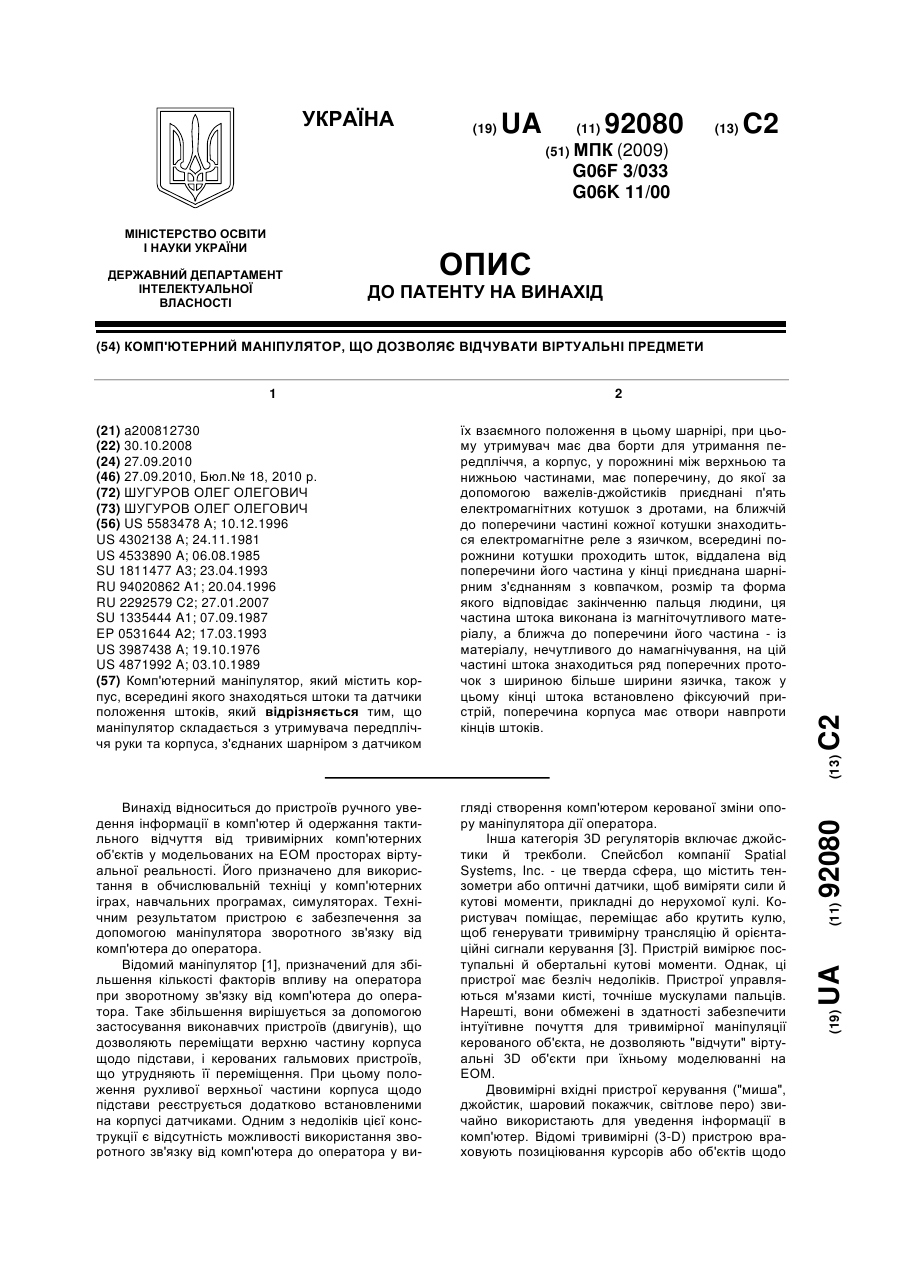
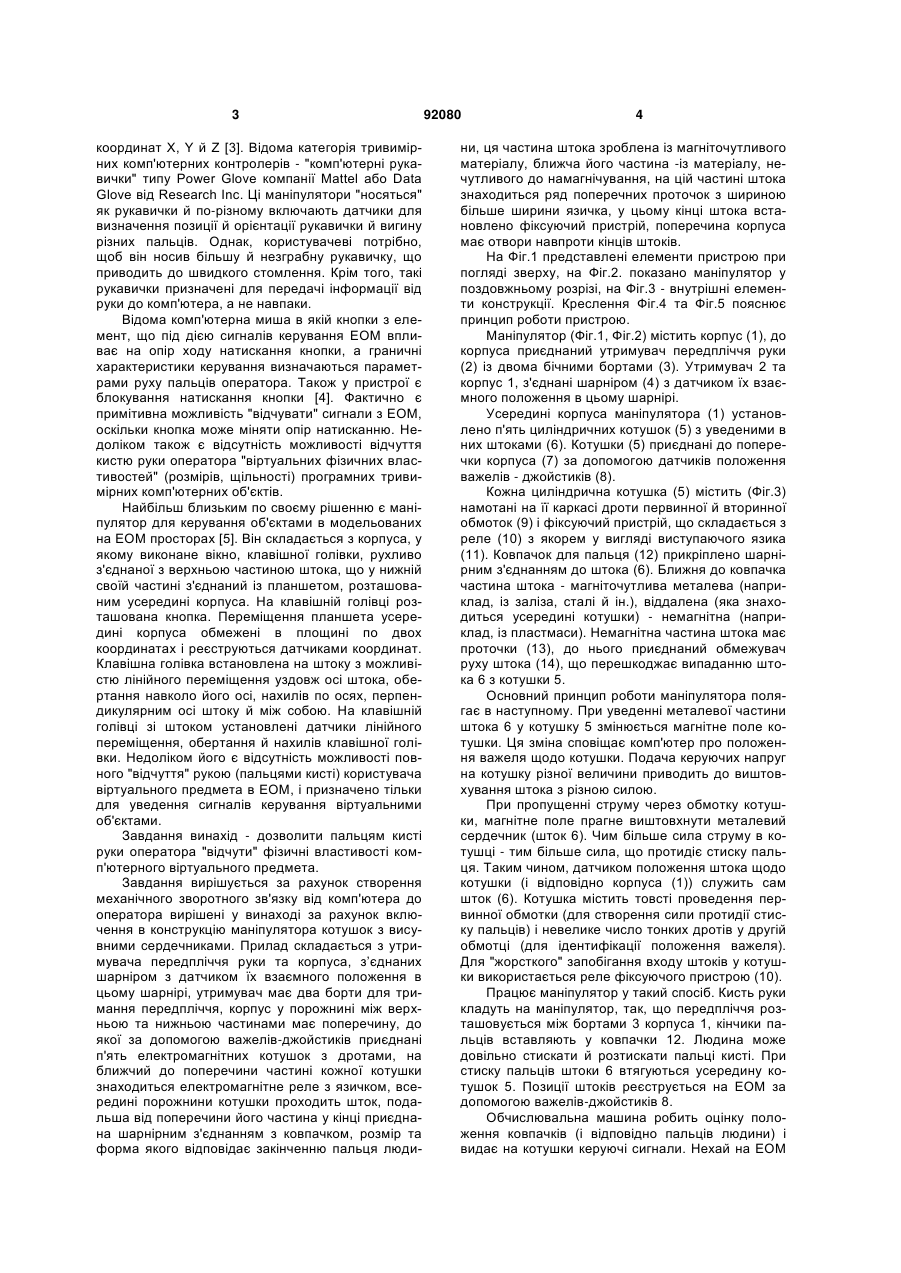
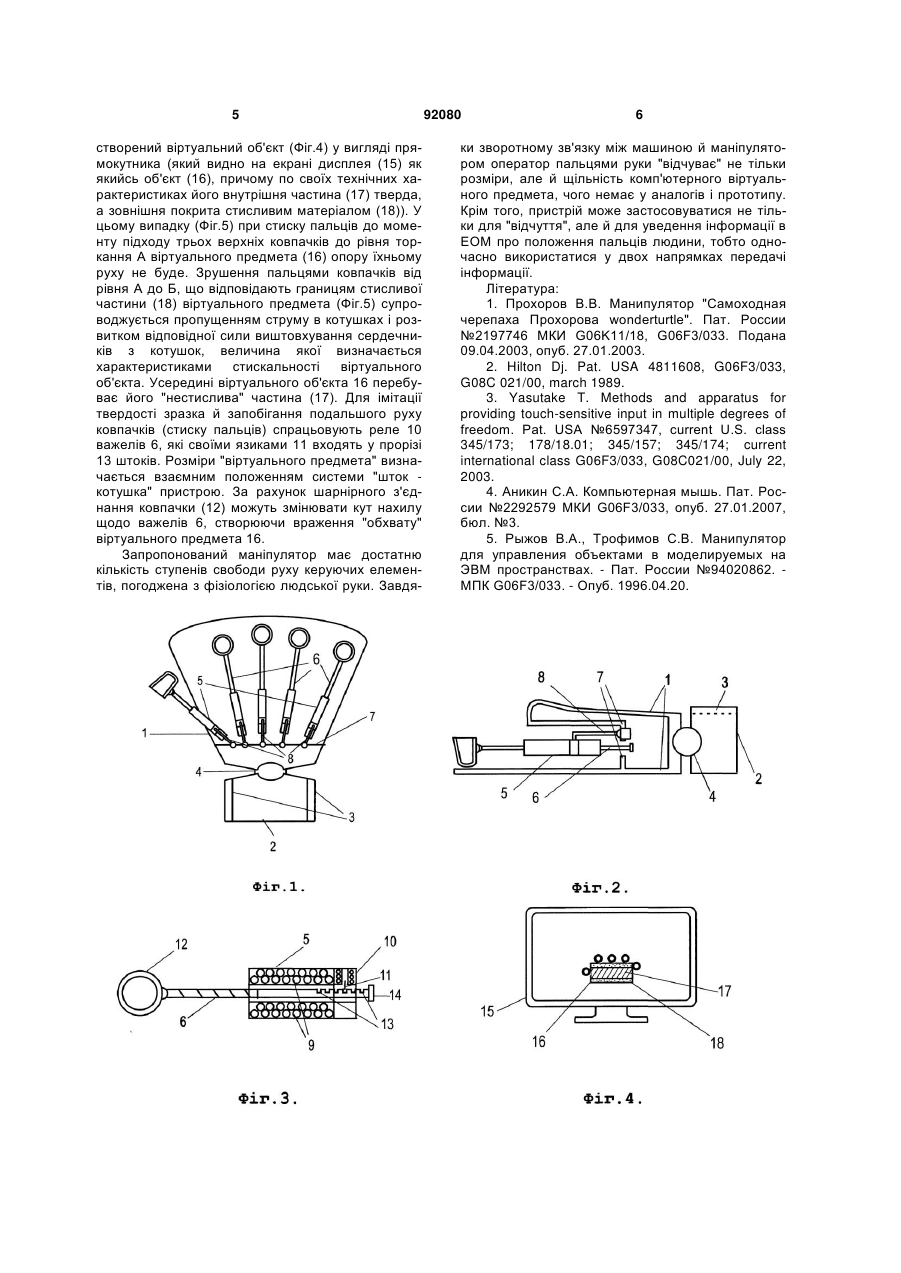
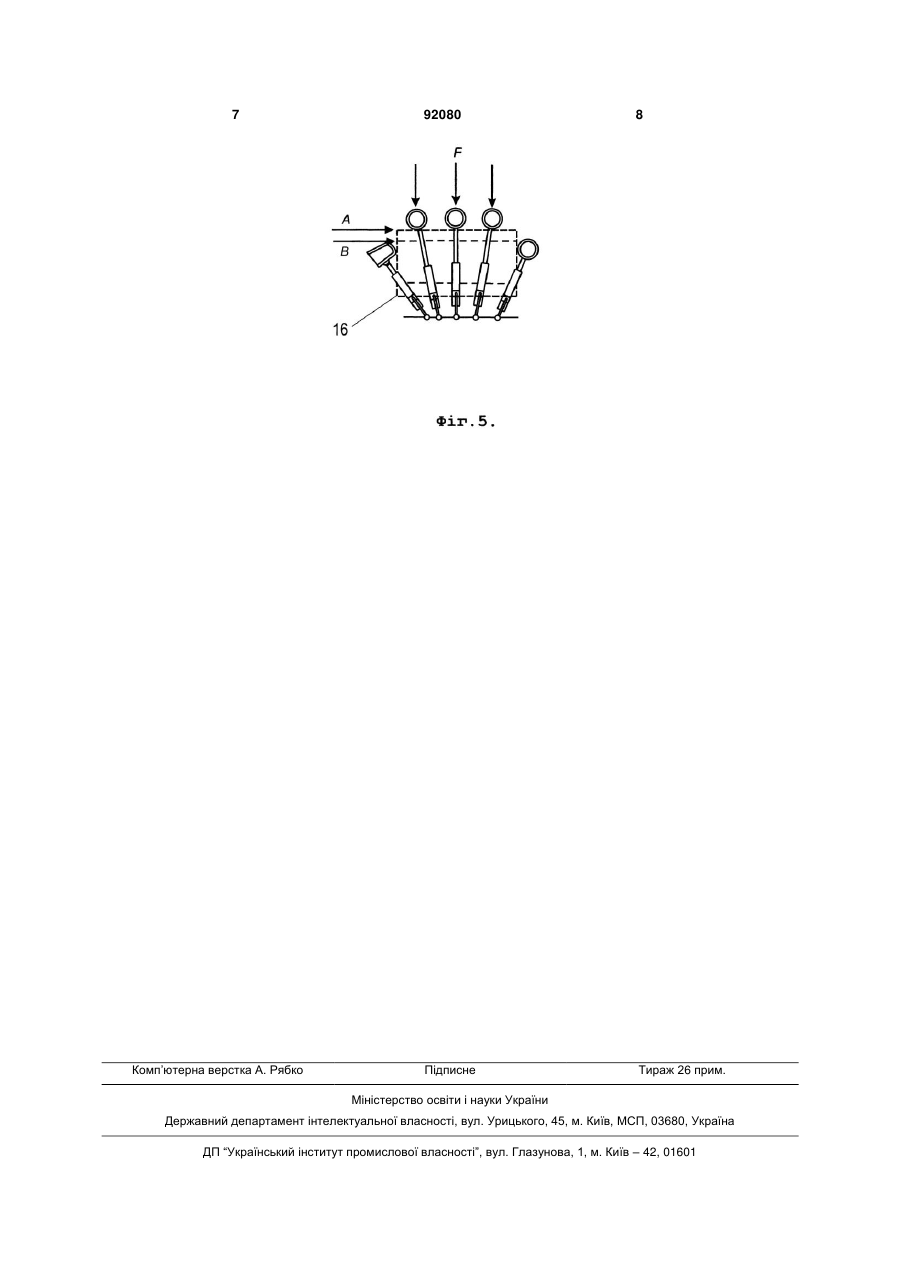
Комп'ютерний маніпулятор, який містить корпус, всередині якого знаходяться штоки та датчики положення штоків, який відрізняється тим, що маніпулятор складається з утримувача передпліччя руки та корпуса, з'єднаних шарніром з датчиком C2 1 3 координат Χ, Υ й Ζ [3]. Відома категорія тривимірних комп'ютерних контролерів - "комп'ютерні рукавички" типу Power Glove компанії Mattel або Data Glove від Research Inc. Ці маніпулятори "носяться" як рукавички й по-різному включають датчики для визначення позиції й орієнтації рукавички й вигину різних пальців. Однак, користувачеві потрібно, щоб він носив більшу й незграбну рукавичку, що приводить до швидкого стомлення. Крім того, такі рукавички призначені для передачі інформації від руки до комп'ютера, а не навпаки. Відома комп'ютерна миша в якій кнопки з елемент, що під дією сигналів керування ЕОМ впливає на опір ходу натискання кнопки, а граничні характеристики керування визначаються параметрами руху пальців оператора. Також у пристрої є блокування натискання кнопки [4]. Фактично є примітивна можливість "відчувати" сигнали з ЕОМ, оскільки кнопка може міняти опір натисканню. Недоліком також є відсутність можливості відчуття кистю руки оператора "віртуальних фізичних властивостей" (розмірів, щільності) програмних тривимірних комп'ютерних об'єктів. Найбільш близьким по своєму рішенню є маніпулятор для керування об'єктами в модельованих на ЕОМ просторах [5]. Він складається з корпуса, у якому виконане вікно, клавішної голівки, рухливо з'єднаної з верхньою частиною штока, що у нижній своїй частині з'єднаний із планшетом, розташованим усередині корпуса. На клавішній голівці розташована кнопка. Переміщення планшета усередині корпуса обмежені в площині по двох координатах і реєструються датчиками координат. Клавішна голівка встановлена на штоку з можливістю лінійного переміщення уздовж осі штока, обертання навколо його осі, нахилів по осях, перпендикулярним осі штоку й між собою. На клавішній голівці зі штоком установлені датчики лінійного переміщення, обертання й нахилів клавішної голівки. Недоліком його є відсутність можливості повного "відчуття" рукою (пальцями кисті) користувача віртуального предмета в ЕОМ, і призначено тільки для уведення сигналів керування віртуальними об'єктами. Завдання винахід - дозволити пальцям кисті руки оператора "відчути" фізичні властивості комп'ютерного віртуального предмета. Завдання вирішується за рахунок створення механічного зворотного зв'язку від комп'ютера до оператора вирішені у винаході за рахунок включення в конструкцію маніпулятора котушок з висувними сердечниками. Прилад складається з утримувача передпліччя руки та корпуса, з’єднаних шарніром з датчиком їх взаємного положення в цьому шарнірі, утримувач має два борти для тримання передпліччя, корпус у порожнині між верхньою та нижньою частинами має поперечину, до якої за допомогою важелів-джойстиків приєднані п'ять електромагнітних котушок з дротами, на ближчий до поперечини частині кожної котушки знаходиться електромагнітне реле з язичком, всередині порожнини котушки проходить шток, подальша від поперечини його частина у кінці приєднана шарнірним з'єднанням з ковпачком, розмір та форма якого відповідає закінченню пальця люди 92080 4 ни, ця частина штока зроблена із магніточутливого матеріалу, ближча його частина -із матеріалу, нечутливого до намагнічування, на цій частині штока знаходиться ряд поперечних проточок з шириною більше ширини язичка, у цьому кінці штока встановлено фіксуючий пристрій, поперечина корпуса має отвори навпроти кінців штоків. На Фіг.1 представлені елементи пристрою при погляді зверху, на Фіг.2. показано маніпулятор у поздовжньому розрізі, на Фіг.3 - внутрішні елементи конструкції. Креслення Фіг.4 та Фіг.5 пояснює принцип роботи пристрою. Маніпулятор (Фіг.1, Фіг.2) містить корпус (1), до корпуса приєднаний утримувач передпліччя руки (2) із двома бічними бортами (3). Утримувач 2 та корпус 1, з'єднані шарніром (4) з датчиком їх взаємного положення в цьому шарнірі. Усередині корпуса маніпулятора (1) установлено п'ять циліндричних котушок (5) з уведеними в них штоками (6). Котушки (5) приєднані до поперечки корпуса (7) за допомогою датчиків положення важелів - джойстиків (8). Кожна циліндрична котушка (5) містить (Фіг.3) намотані на її каркасі дроти первинної й вторинної обмоток (9) і фіксуючий пристрій, що складається з реле (10) з якорем у вигляді виступаючого язика (11). Ковпачок для пальця (12) прикріплено шарнірним з'єднанням до штока (6). Ближня до ковпачка частина штока -магніточутлива металева (наприклад, із заліза, сталі й ін.), віддалена (яка знаходиться усередині котушки) - немагнітна (наприклад, із пластмаси). Немагнітна частина штока має проточки (13), до нього приєднаний обмежувач руху штока (14), що перешкоджає випаданню штока 6 з котушки 5. Основний принцип роботи маніпулятора полягає в наступному. При уведенні металевої частини штока 6 у котушку 5 змінюється магнітне поле котушки. Ця зміна сповіщає комп'ютер про положення важеля щодо котушки. Подача керуючих напруг на котушку різної величини приводить до виштовхування штока з різною силою. При пропущенні струму через обмотку котушки, магнітне поле прагне виштовхнути металевий сердечник (шток 6). Чим більше сила струму в котушці - тим більше сила, що протидіє стиску пальця. Таким чином, датчиком положення штока щодо котушки (і відповідно корпуса (1)) служить сам шток (6). Котушка містить товсті проведення первинної обмотки (для створення сили протидії стиску пальців) і невелике число тонких дротів у другій обмотці (для ідентифікації положення важеля). Для "жорсткого" запобігання входу штоків у котушки використається реле фіксуючого пристрою (10). Працює маніпулятор у такий спосіб. Кисть руки кладуть на маніпулятор, так, що передпліччя розташовується між бортами 3 корпуса 1, кінчики пальців вставляють у ковпачки 12. Людина може довільно стискати й розтискати пальці кисті. При стиску пальців штоки 6 втягуються усередину котушок 5. Позиції штоків реєструється на ЕОМ за допомогою важелів-джойстиків 8. Обчислювальна машина робить оцінку положення ковпачків (і відповідно пальців людини) і видає на котушки керуючі сигнали. Нехай на ЕОМ 5 створений віртуальний об'єкт (Фіг.4) у вигляді прямокутника (який видно на екрані дисплея (15) як якийсь об'єкт (16), причому по своїх технічних характеристиках його внутрішня частина (17) тверда, а зовнішня покрита стисливим матеріалом (18)). У цьому випадку (Фіг.5) при стиску пальців до моменту підходу трьох верхніх ковпачків до рівня торкання А віртуального предмета (16) опору їхньому руху не буде. Зрушення пальцями ковпачків від рівня А до Б, що відповідають границям стисливої частини (18) віртуального предмета (Фіг.5) супроводжується пропущенням струму в котушках і розвитком відповідної сили виштовхування сердечників з котушок, величина якої визначається характеристиками стискальності віртуального об'єкта. Усередині віртуального об'єкта 16 перебуває його "нестислива" частина (17). Для імітації твердості зразка й запобігання подальшого руху ковпачків (стиску пальців) спрацьовують реле 10 важелів 6, які своїми язиками 11 входять у прорізі 13 штоків. Розміри "віртуального предмета" визначається взаємним положенням системи "шток котушка" пристрою. За рахунок шарнірного з'єднання ковпачки (12) можуть змінювати кут нахилу щодо важелів 6, створюючи враження "обхвату" віртуального предмета 16. Запропонований маніпулятор має достатню кількість ступенів свободи руху керуючих елементів, погоджена з фізіологією людської руки. Завдя 92080 6 ки зворотному зв'язку між машиною й маніпулятором оператор пальцями руки "відчуває" не тільки розміри, але й щільність комп'ютерного віртуального предмета, чого немає у аналогів і прототипу. Крім того, пристрій може застосовуватися не тільки для "відчуття", але й для уведення інформації в ЕОМ про положення пальців людини, тобто одночасно використатися у двох напрямках передачі інформації. Література: 1. Прохоров В.В. Манипулятор "Самоходная черепаха Прохорова wonderturtle". Пат. России №2197746 МКИ G06K11/18, G06F3/033. Подана 09.04.2003, опуб. 27.01.2003. 2. Hilton Dj. Pat. USA 4811608, G06F3/033, G08C 021/00, march 1989. 3. Yasutake T. Methods and apparatus for providing touch-sensitive input in multiple degrees of freedom. Pat. USA №6597347, current U.S. class 345/173; 178/18.01; 345/157; 345/174; current international class G06F3/033, G08C021/00, July 22, 2003. 4. Аникин C.A. Компьютерная мышь. Пат. России №2292579 МКИ G06F3/033, опуб. 27.01.2007, бюл. №3. 5. Рыжов В.А., Трофимов С.В. Манипулятор для управления объектами в моделируемых на ЭВМ пространствах. - Пат. России №94020862. МПК G06F3/033. - Опуб. 1996.04.20. 7 Комп’ютерна верстка А. Рябко 92080 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюComputer manipulator to allow feeling virtual objects
Автори англійськоюShuhurov Oleh Olehovych
Назва патенту російськоюКомпьютерный манипулятор, позволяющий ощутить виртуальные предметы
Автори російськоюШугуров Олег Олегович
МПК / Мітки
МПК: G06F 3/033, G06K 11/00
Мітки: відчувати, віртуальні, дозволяє, предмети, комп'ютерній, маніпулятор
Код посилання
<a href="https://ua.patents.su/4-92080-kompyuternijj-manipulyator-shho-dozvolyaeh-vidchuvati-virtualni-predmeti.html" target="_blank" rel="follow" title="База патентів України">Комп’ютерний маніпулятор, що дозволяє відчувати віртуальні предмети</a>
Маніпулятор
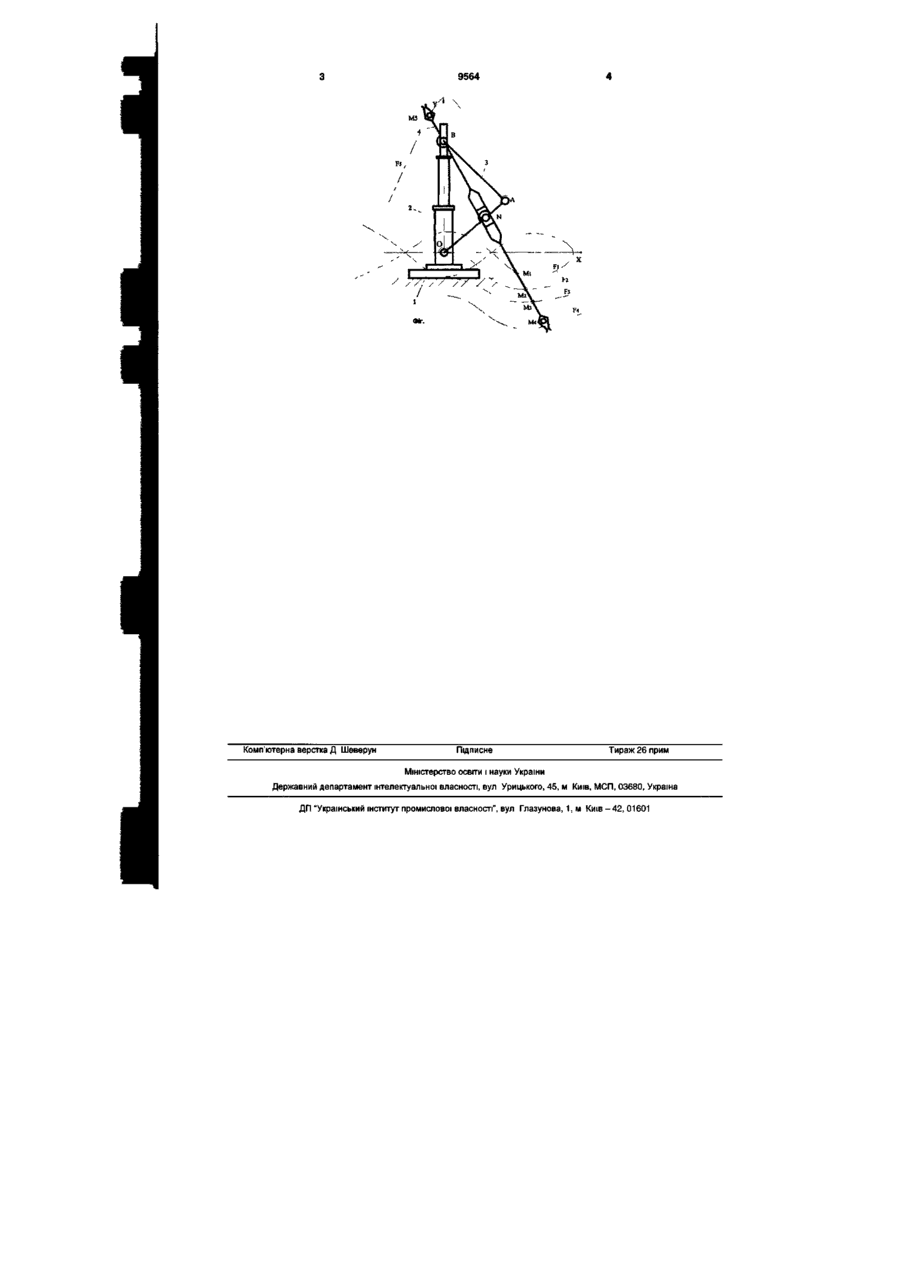
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Табацков Вячеслав Петрович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор портативної радіостанції
Номер патенту: 30167
Опубліковано: 11.02.2008
Автор: Шепотько Павло Олександрович
МПК: H04B 1/44
Мітки: портативної, маніпулятор, радіостанції
Формула / Реферат:
Маніпулятор портативної радіостанції, що містить мікрофон, мікросхему і кнопку-тангенту, який відрізняється тим, що мікрофон і кнопка-тангента винесені за межі блока маніпулятора і з'єднані з ним провідною або безпровідною системою.
Інструментальний маніпулятор
Номер патенту: 43879
Опубліковано: 10.09.2009
Автори: Залевський Костянтин Едуардович, Удовенко Сергій Олександрович, Дзержинський Віталій Олександрович, Волошин Олексій Іванович, Маринов Дмитро Всеволодович
МПК: B21J 13/00
Мітки: інструментальний, маніпулятор
Формула / Реферат:
Інструментальний маніпулятор, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і механізм обертання поворотної обойми, який відрізняється тим, що поворотна обойма виконана з упорами, розміщеними по колу на...
Маніпулятор для установлення та знімання шиберних затворів
Номер патенту: 58993
Опубліковано: 15.08.2003
Автори: Музирін Олександр Олегович, Слівченко Анатолій Іванович
МПК: B25J 1/00, B22D 41/08
Мітки: установлення, маніпулятор, шиберних, затворів, знімання
Формула / Реферат:
Маніпулятор для установлення та знімання шиберних затворів, що містить нерухомий стояк, циліндр, на штоку якого встановлено з можливістю обертання стіл, важіль з вузлом кріплення циліндра,який відрізняється тим, що стіл додатково містить знімний пристрій для формування гнізда під сталерозливний вогнетривкий стакан, а вузол кріплення циліндра виконано у вигляді нерухомо закріпленого до торця важеля корпусу з пружиною, на яку встановлено...
Маніпулятор
Номер патенту: 91366
Опубліковано: 26.07.2010
Автори: Занічковська Любов Володимирівна, Ощипок Ігор Миколайович
МПК: B25J 11/00, B25J 1/00
Мітки: маніпулятор
Формула / Реферат:
1. Маніпулятор, який містить колону-основу, захоплювач, силові циліндри, шток, руку робота, який відрізняється тим, що колона-основа складається з верхньої, середньої і нижньої секцій, силові циліндри виконані як силові гідроциліндри, маніпулятор містить також обойму з горизонтальними роликами, охоплену втулкою гасіння вібрацій, шестірню, колесо, вал гідродвигуна, гідростанцію, блок керування, верхній і нижній підшипники з, відповідно,...
Попередній патент: Спосіб безперервного відпалу і підготовки смуги з високоміцної сталі для її цинкування шляхом гарячого занурення в розплав
Наступний патент: Комплекс обладнання для розділення відвалів центральних збагачувальних фабрик на вугільний концентрат та будівельний матеріал
Випадковий патент: Контейнер для зберігання екологічнонебезпечних речовин та радіоактивних відходів низької та середньої активності