Оптичний локатор
Формула / Реферат
Оптичний локатор, що складається з випромінювача, колімаційної оптичної системи та вузла орієнтації напрямків вихідних пучків, який відрізняється тим, що випромінювач, розміщений в фокальній площині об'єктива, складається з множини елементів, що утворюють матричну структуру, які вмикаються і вимикаються блоком управління незалежно від стану інших елементів.
Текст
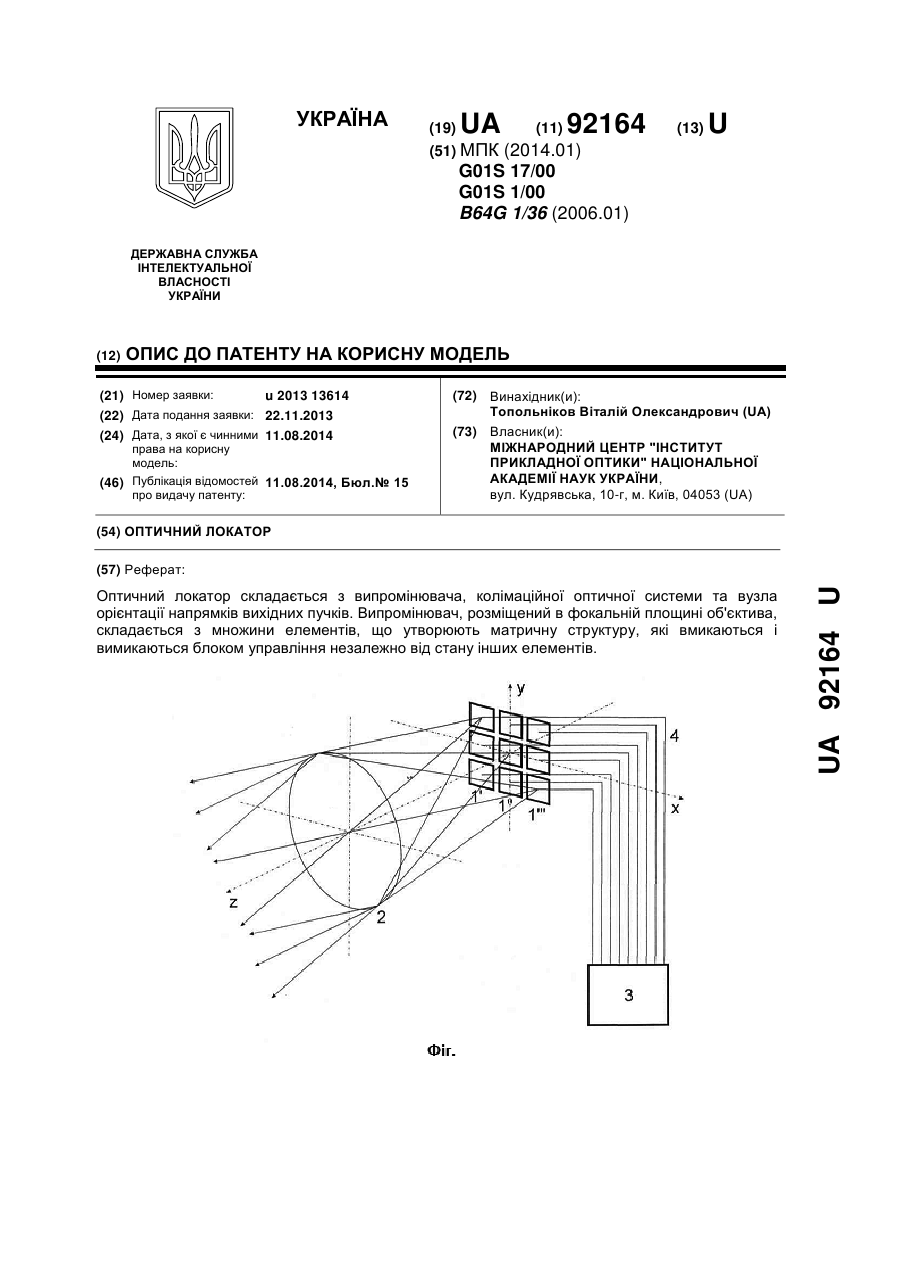
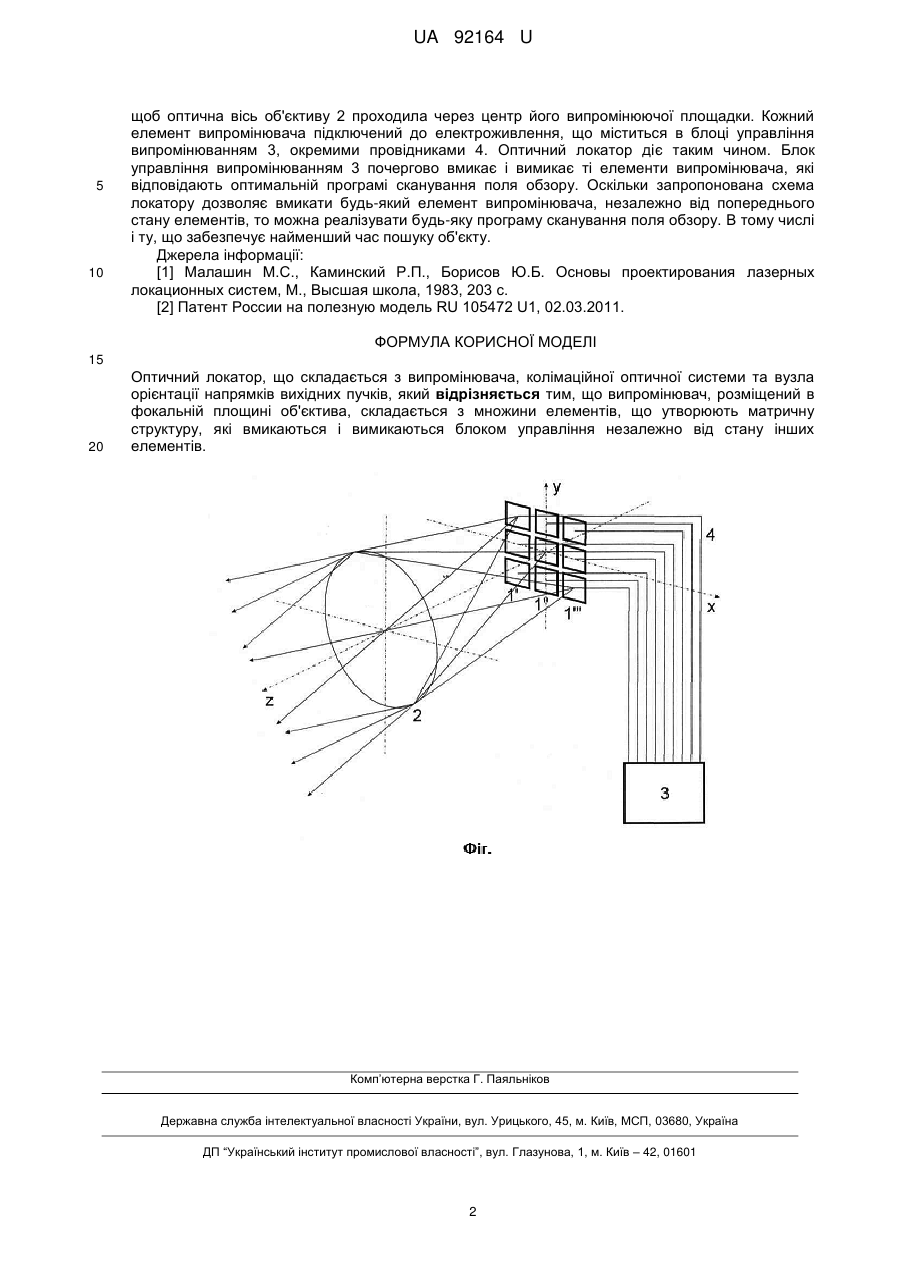
Реферат: UA 92164 U UA 92164 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області приладобудування, зокрема оптичних засобів навігації та координатного забезпечення систем управління рухом літальних та космічних апаратів, їх зближенням та стиковкою або посадкою, а також в робототехніці при дистанційному керуванні робототехнічними комплексами в шкідливих для людини зонах. Відомі оптичні локатори для виявлення об'єктів [1] складаються з джерела випромінювання, колімаційної оптики, вузла сканування пучком зони обзору та фотоприймача. Для цього найчастіше застосовують построкове або спіральне сканування пучка з допомогою двох рухомих дзеркал або акусто-оптичних дефлекторів. Механічне сканування рухомими дзеркалами вважається недостатньо надійним, а акусто-оптичні дефлектори потребують схемних ускладнень, оскільки вони ефективно працюють лише в паралельних пучках. Загальним недоліком таких вузлів сканування є неможливість змінювати черговість огляду елементів поля обзору та кутовий розмір пучка під час сканування, що перешкоджає оптимізації програми огляду елементів поля обзору. Відомий оптико-електронний пристрій [2], вибраний за прототип, містить багатоканальний лазерний передавач, кожний канал якого має свій випромінювач, модулятор та об'єктив. При цьому канали розміщені так, що осі діаграм випромінювання каналів лежать в одній площині, а їх пучки частково перекривають сусідні канали. Тому сумарна діаграма випромінювання має витягнуту форму. Її ширина дорівнює розміру діаграми одного каналу, а довжина збільшена пропорційно кількості каналів. Таким чином, сканування поля обзору проводиться не вузьким пучком, а рядком таких пучків. Тому сканування здійснюється по рядкам, а не по елементам, що дозволяє підвищити темп огляду зони обзору. Таке підвищення досягається ціною ускладнення передавача, через значне збільшення кількості випромінювачів, модуляторів та об'єктивів. Це призводить до підвищення вартості локатору, ускладнення юстировок та зниження надійності. При цьому огляд рядків поля обзору залишається почерговим, тобто детермінованим. Неможливість змінювати черговість огляду рядків перешкоджає оптимізації його програми з тим, щоб скоротити час огляду поля обзору. Отже, побудова цього локатору не дозволяє зменшити час пошуку об'єкту за рахунок оптимізації програми сканування. В основу корисної моделі покладено задачу вдосконалення оптичного локатору шляхом модифікації випромінювача, його розміщення відносно об'єктиву та управління випромінюванням елементів, що дозволяє реалізувати таку черговість вмикання елементів, яка забезпечує мінімальний час пошуку об'єкту. Поставлена задача вирішується тим, що в оптичному локаторі, який складається з випромінювача, колімаційної оптичної системи та вузла орієнтації напрямку вихідних пучків, згідно з винаходом, випромінювач, розміщений в фокальній площині об'єктива, складається з множини елементів, що утворюють матричну структуру, які вмикаються і вимикаються блоком управління незалежно від стану інших елементів. Запропонована побудова устрою забезпечує відповідність напрямків пучків випромінювання локатору положенням елементів матриці. Це дозволяє змінювати напрямки пучків шляхом вмикання і вимикання відповідних елементів випромінювача, тобто електронними, а не оптикомеханічними засобами. Оскільки кожний елемент може вмикатися і вимикатися блоком управління незалежно від стану інших елементів, то вихідному пучку локатору можна надати будь-який напрямок, незалежно від попередньої його орієнтації. Окрім того, запропонована побудова дає можливість вмикати одночасно кілька елементів матриці, і тим самим, змінювати ширину пучка під час локації. Ці властивості запропонованого локатору знімають обмеження з траєкторії сканування пучком поля обзору та дозволяють змінювати ширину пучка. Таким чином, запропонований локатор дозволяє вибирати без обмежень, притаманних прототипу, такі програми сканування, які забезпечують найменший час пошуку об'єкту. Суть запропонованої корисної моделі пояснюється кресленням, на якому зображена схема передавача оптичного локатору. Він містить матричний випромінювач, що складається з елементів 1', 1", 1'"…, об'єктив 2, блок управління випромінюванням 3 та електричні провідники 4. Випромінюючі елементи 1', 1", 1'"… розміщені в фокальній площині об'єктиву 2. Це забезпечує на виході локатору певні напрямки пучків від кожного елементу, які визначаються положеннями цих елементів відносно оптичної вісі об'єктиву 2. Кожний елемент випромінювача 1', 1", 1'"… з'єднаний провідниками 4 з джерелом живлення, що міститься в блоці управління випромінюванням 3. Передавач оптичного локатору містить елементи матричного випромінювача 1', 1", 1'"…, що розташовані в фокальній площині об'єктиву 2, блок управління випромінюванням елементів 3 та електричні провідники 4. Матричний випромінювач з елементами 1', 1", 1'"… розміщений так, 1 UA 92164 U 5 10 щоб оптична вісь об'єктиву 2 проходила через центр його випромінюючої площадки. Кожний елемент випромінювача підключений до електроживлення, що міститься в блоці управління випромінюванням 3, окремими провідниками 4. Оптичний локатор діє таким чином. Блок управління випромінюванням 3 почергово вмикає і вимикає ті елементи випромінювача, які відповідають оптимальній програмі сканування поля обзору. Оскільки запропонована схема локатору дозволяє вмикати будь-який елемент випромінювача, незалежно від попереднього стану елементів, то можна реалізувати будь-яку програму сканування поля обзору. В тому числі і ту, що забезпечує найменший час пошуку об'єкту. Джерела інформації: [1] Малашин М.С., Каминский Р.П., Борисов Ю.Б. Основы проектирования лазерных локационных систем, М., Высшая школа, 1983, 203 с. [2] Патент России на полезную модель RU 105472 U1, 02.03.2011. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Оптичний локатор, що складається з випромінювача, колімаційної оптичної системи та вузла орієнтації напрямків вихідних пучків, який відрізняється тим, що випромінювач, розміщений в фокальній площині об'єктива, складається з множини елементів, що утворюють матричну структуру, які вмикаються і вимикаються блоком управління незалежно від стану інших елементів. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюTopolnikov Vitalii Oleksandrovych
Автори російськоюТопольников Виталий Александрович
МПК / Мітки
МПК: G01S 1/00, B64G 1/36, G01S 17/00
Код посилання
<a href="https://ua.patents.su/4-92164-optichnijj-lokator.html" target="_blank" rel="follow" title="База патентів України">Оптичний локатор</a>
Переносний оптичний пиловимірювач
Номер патенту: 52877
Опубліковано: 10.09.2010
Автори: Максименко Юрій Миколайович, Мазан Євгенія Григорівна, Дашковський Олександр Анастасійович
МПК: G01N 21/31
Мітки: оптичний, переносний, пиловимірювач
Формула / Реферат:
Переносний оптичний пиловимірювач, що містить оптичний випромінювач з лінзою, частота імпульсів якого задається генератором, фотоприймач з лінзою, сигнал з якого зчитується синхронно з випромінюванням випромінювача, а також зонд з прорізами для проходження досліджуваного потоку газу, що розміщується в газоході, який відрізняється тим, що в ньому додатково впоперек зонда з обох сторін прорізів встановлені вікна зі скла, прозорого для...
Локатор для виявлення порушень суцільності бурильних труб
Номер патенту: 31354
Опубліковано: 15.12.2000
Автор: Вирста Ярослав Ярославович
МПК: E21B 47/00
Мітки: суцільності, бурильних, виявлення, труб, порушень, локатор
Формула / Реферат:
Локатор для виявлення порушень суцільності бурильних труб, який містить трансформатор з магнітопроводами круглого перерізу і електронну схему посилення, який відрізняється тим, що трансформатор виконаний з магнітопроводом, розташованим вздовж осьової лінії локатора, а вторинні обмотки з різним числом витків приєднані до вхідного ланцюга електронної схеми посилення та розташовані зустрічно вторинним обмоткам, приєднаним до вихідного ланцюга...
Переносний оптичний пиловимірювач
Номер патенту: 56454
Опубліковано: 10.01.2011
Автори: Дашковський Олександр Анастасійович, Максименко Юрій Миколайович
МПК: G01N 21/31
Мітки: переносний, оптичний, пиловимірювач
Формула / Реферат:
Переносний оптичний пиловимірювач, що містить оптичний випромінювач з лінзою-коліматором, частота імпульсів випромінювання якого задається генератором, фотоприймач з лінзою-об'єктивом, сигнал з якого реєструється синхронно з випромінюванням випромінювача, зонд, що поміщається в газоході та виконаний зі спеціальними подовжніми прорізами для проходження аналізованого пилогазового потоку, відбивач, що знаходиться на торці зонда та виконаний у...
Переносний оптичний пиловимірювач
Номер патенту: 47024
Опубліковано: 11.01.2010
Автори: Тімін Олексій Кузьмич, Мазан Євгенія Григорівна, Дашковський Олександр Анастасійович, Максименко Юрій Миколайович
МПК: G01N 21/31
Мітки: оптичний, переносний, пиловимірювач
Формула / Реферат:
1. Переносний оптичний пиловимірювач, який містить оптичний випромінювач, генератор задавальної частоти імпульсів випромінювання, фотоприймач, сигнали з якого зчитуються синхронно з вихідними імпульсами випромінювача, датчик температури та зонд, який розміщується в газоході з прорізами для проходження досліджуваного потоку газу, який відрізняється тим, що прорізи в зонді закриваються кожухом, що повертається, причому у момент початку...
Пожежний димовий оптичний сповіщувач
Номер патенту: 29253
Опубліковано: 10.01.2008
Автор: Сорокопуд Олексій Семенович
МПК: G08B 17/10
Мітки: оптичний, димовий, сповіщувач, пожежний
Формула / Реферат:
Пожежний димовий оптичний сповіщувач, що містить димову камеру з корпусом і кришкою, всередині якої установлені під кутом один до одного джерело направленого світла у вигляді інфрачервоного випромінювача і приймач розсіяного світла, оптично ізольовані між собою перегородкою, що має козирок, направлений в сторону випромінювача, а також розташований напроти випромінювача дзеркальний відбивач, який містить дві відбиваючі поверхні, що...
Попередній патент: Набір для харчування
Наступний патент: Тепловий пожежний сповіщувач
Випадковий патент: Магнітний захват