Маховик змінного моменту інерції
Номер патенту: 94321
Опубліковано: 26.04.2011
Автори: Ільченко Андрій Володимирович, Ломакін Володимир Олександрович
Формула / Реферат
Маховик змінного моменту інерції, який містить механізм (20) зміни моменту інерції з сонячною шестірнею (22), що виконана спільно з вихідним валом (21) двигуна, та планетарними колесами (23), до яких на важелях (27) прикріплені важки (28), електричну муфту (40), блок (51) керування, який відрізняється тим, що введена нерухома порожня камера (12) у вигляді прямого еліптичного циліндра, в якій розміщено кулісу (13) з повзуном (11), встановленим з дотиканням до стінок нерухомої порожньої камери (12), причому куліса (13) нерухомо з'єднана з вихідним валом (21) двигуна і розташована перпендикулярно до його осі.
Текст
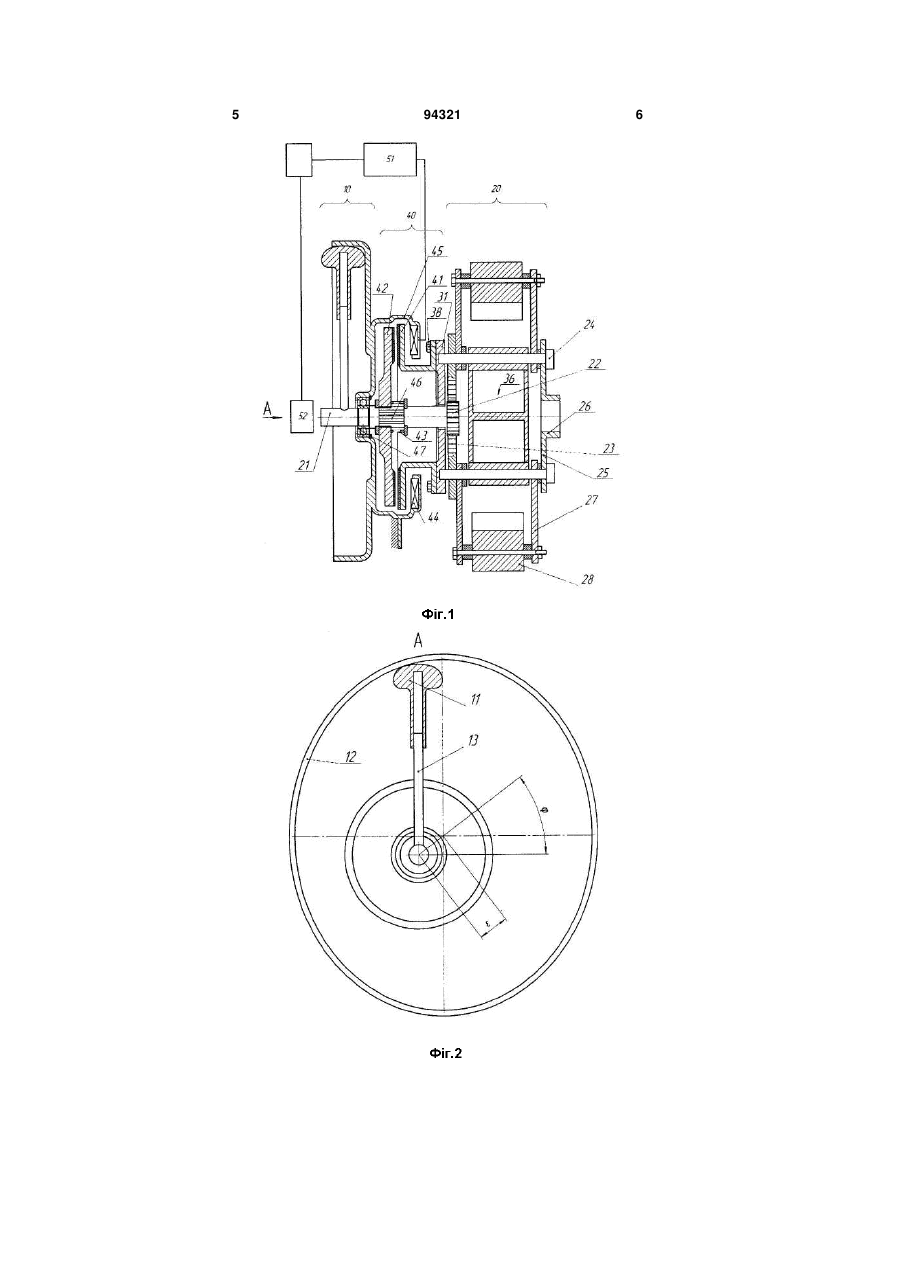
Маховик змінного моменту інерції, який містить механізм (20) зміни моменту інерції з сонячною шестірнею (22), що виконана спільно з вихідним валом (21) двигуна, та планетарними колесами (23), до яких на важелях (27) прикріплені важки (28), електричну муфту (40), блок (51) керування, який відрізняється тим, що введена нерухома порожня камера (12) у вигляді прямого еліптичного циліндра, в якій розміщено кулісу (13) з повзуном (11), встановленим з дотиканням до стінок нерухомої порожньої камери (12), причому куліса (13) нерухомо з'єднана з вихідним валом (21) двигуна і розташована перпендикулярно до його осі. (19) (21) a200910011 (22) 01.10.2009 (24) 26.04.2011 (46) 26.04.2011, Бюл.№ 8, 2011 р. (72) ІЛЬЧЕНКО АНДРІЙ ВОЛОДИМИРОВИЧ, ЛОМАКІН ВОЛОДИМИР ОЛЕКСАНДРОВИЧ (73) ЖИТОМИРСЬКИЙ ДЕРЖАВНИЙ ТЕХНОЛОГІЧНИЙ УНІВЕРСИТЕТ (56) US 20070179012 A1; 02.08.2007 RU 2044939 C1; 27.09.1995 GB 2057061 A; 25.03.1981 EP 0329811 A1; 30.08.1989 Басалыгин Г.М. Моделирование динамики кривошипно-шатунного механизма как упругоинерционной системы с одной степенью свободы 3 Крім того, зміна моменту інерції протягом оберту дозволить зменшити загальну масу маховика при заданому рівні стабілізації частоти обертання. Таким чином, пристрій-винахід дозволяє періодично змінювати момент інерції протягом оберту, чим досягається вирішення задачі винаходу. Суть винаходу пояснюється кресленнями. Перелік креслень: - фіг.1 - осьовий розріз маховика змінного моменту інерції; - фіг.2 - розріз нерухомої порожньої камери. Маховик змінного моменту інерції містить механізм 20 зміни моменту інерції, електричну муфту 40 та механізм 10 періодичної зміни моменту інерції (фіг.1). Механізм 20 зміни моменту інерції, у свою чергу, містить сонячну шестірню 22, що виконана спільно з вихідним валом 21 двигуна, одне або декілька планетарних коліс 23, які входять в зачеплення з сонячною шестірнею 22, один або декілька опорних валів 24 для підтримки, при обертанні, планетарних коліс 23. Механізм 20 зміни моменту інерції також містить один або декілька важелів 27, шарнірно змонтованих на опорних валах 24, виконаних з можливістю повороту за допомогою планетарних коліс 23, один або декілька елементів 36, подібних за формою до важків 28 і розташованих якнайближче до осі обертання вихідного вала 21 двигуна для вміщення важків 28, що змонтовані на важелях 27. Електрична муфта 40 містить стаціонарний диск 41 електричної муфти, з'єднаний болтами 38 з опорою 31, рухомий диск 42 електричної муфти, розташований навпроти стаціонарного диска 41 електричної муфти та виконаний з можливістю переміщення вздовж шліців 46. Електрична муфта 40 також містить пружину 43 стискання, кожух 45 електричної муфти, на якому змонтована електромагнітна котушка 44. Механізм 10 періодичної зміни моменту інерції містить нерухому порожню камеру 12 у вигляді прямого циліндра, в основі якого лежить еліпс, центр якого може і не лежати на осі обертання вихідного вала 21 двигуна. В цьому випадку його положення буде характеризуватися величиною ексцентриситету та кутом (фіг.2). В нерухомій порожній камері 12 розміщено одну або декілька куліс 13, що нерухомо з'єднані з вихідним валом 21 двигуна у перпендикулярній площині, причому на кулісі 13 встановлено повзун 11. Кількість куліс 13, їх взаємне розміщення, вага повзунів 11, параметри еліпса, що лежить в основі нерухомої камери 12, величина ексцентриситету ε та кута підбираються індивідуально для відтворення заданого закону зміни моменту інерції. Для змен 94321 4 шення сил тертя повзун 11 може містити підшипники кочення. Маховик змінного моменту інерції працює таким чином. При роботі двигуна 52 на холостому ходу важки 28 максимально віддалені від осі обертання, електрична муфта 40 ввімкнена, а, отже, сонячна шестірня 22, планетарні колеса 23, важелі 27 та важки 28 заблоковані від переміщень. При цьому момент інерції маховика є максимальним. При прискоренні (сповільненні) двигуна 52 блок 51 керування вимикає струм на електромагнітній котушці 44, електрична муфта 40 вимикається і сонячна шестірня 22 починає обертатися, обертаючи планетарні колеса 23. Це відбувається внаслідок того, що при прискоренні (сповільненні) двигуна 52 частота обертання сонячної шестірні 22 більша (менша), ніж частота обертання планетарних коліс 23, що приводить до наближення (віддалення) важків 28 до осі обертання вихідного вала 21 двигуна. При подачі сигналу вимикання двигуна 52 блок 51 керування вимикає електричну муфту 40. За рахунок обертання сонячної шестірні 22 та планетарних коліс 23 важки 28 через важелі 27 переміщуються в найближче до осі обертання положення. Далі вмикається електрична муфта 40 і лише після цього вимикаєтьсядвигун 52. Це забезпечує мінімальний опір маховика при запуску двигуна. На всіх режимах роботи двигуна 52 при обертанні вихідного вала 21 з ним обертається і куліса 13 разом з повзуном 11. Під дією відцентрових сил повзун 11 переміщається вздовж куліси 13, поки не почне дотикатися до стінок нерухомого циліндра 12 (фіг.2). Далі при обертанні куліси 13 повзун 11 рухається по ній, постійно контактуючи з поверхнею нерухомого циліндра 12. При цьому за рахунок зміни положення повзуна 11, в залежності від кута повороту куліси 13, момент інерції пристрою змінюється протягом оберту на всіх режимах роботи двигуна. Джерела інформації 1. Patent Application Publication United States US 2007/0179012 A1, МПК Р16Н57/08. Variable Flywheel Mechanism and Flywheel Apparatus/Yasunari Kimura, Takao Tsuboi, Tsuneo Endoh. - №P2006-022445; Filed 31.01.2006, Publish 02.08.2007 Appl. №11/699,368. 2. Басалыгин Г.М. Моделирование динамики кривошипно-шатунного механизма как упругоинерционной системы с одной степенью свободы // Двигателестроение. - Л.: Машиностроение. 1990. - № 9. - С. 16-19. 5 94321 6 7 Комп’ютерна верстка М. Ломалова 94321 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFlywheel with variable moment of inertia
Автори англійськоюIlchenko Andrii Volodymyrovych, Lomakin Volodymyr Oleksandrovych
Назва патенту російськоюМаховик переменного момента инерции
Автори російськоюИльченко Андрей Владимирович, Ломакин Владимир Александрович
МПК / Мітки
МПК: F16F 15/30
Мітки: змінного, інерції, маховик, моменту
Код посилання
<a href="https://ua.patents.su/4-94321-makhovik-zminnogo-momentu-inerci.html" target="_blank" rel="follow" title="База патентів України">Маховик змінного моменту інерції</a>
Маховик перемінного моменту інерції

Номер патенту: 31186
Опубліковано: 15.12.2000
Автори: Овсієнко Лариса Григорівна, Бондарєв Валентин Степанович, Бондарєв Сергій Валентинович, Тарасов Юрій Михайлович
МПК: F16F 15/30
Мітки: маховик, інерції, перемінного, моменту
Текст:
...аксіально рортзхора нї каналів S. Кгрпус і маховика гакріплений на валу 3 машини. Висота лопаток £ та 6 з одного торца, яка дорівнює h, більше висоти лопаток 3 та 7 а другого торца, яка дорівнює h f t як Ї/. ІНІМ ^ТЙ г" гва рагі;, отж^ h >= 2h^. Б порсжнині маховика анахо Маховик перемінного моменту інерції npsnrce т=:-с:м При пуск/ машини ибзргакгзїй момент від SSLT/ ЧІІНСИ. 9 перелаемся корпусу і маховика, який починає...
Спосіб регулювання динамічного моменту інерції маховика
Номер патенту: 38651
Опубліковано: 12.01.2009
Автори: Стрілець Олег Романович, Стрілець Володимир Миколайович, Ріло Ілля Павлович, Марчук Микола Михайлович, Марчук Роман Миколайович
МПК: F16F 15/30
Мітки: маховика, динамічного, регулювання, інерції, моменту, спосіб
Формула / Реферат:
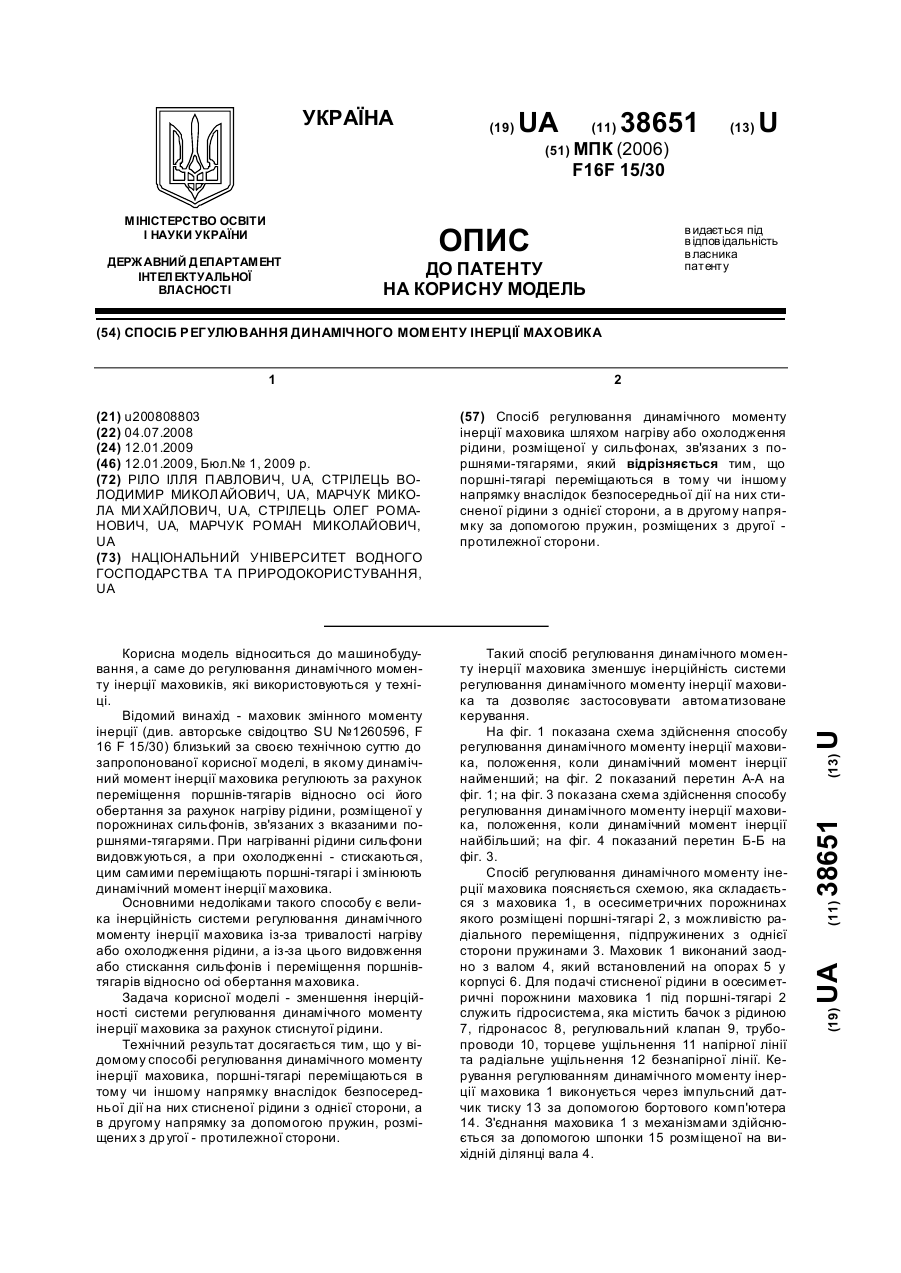
Спосіб регулювання динамічного моменту інерції маховика шляхом нагріву або охолодження рідини, розміщеної у сильфонах, зв'язаних з поршнями-тягарями, який відрізняється тим, що поршні-тягарі переміщаються в тому чи іншому напрямку внаслідок безпосередньої дії на них стисненої рідини з однієї сторони, а в другому напрямку за допомогою пружин, розміщених з другої - протилежної сторони.
Спосіб регулювання динамічного моменту інерції маховика
Номер патенту: 38650
Опубліковано: 12.01.2009
Автори: Марчук Микола Михайлович, Стрілець Володимир Миколайович, Ріло Ілля Павлович, Марчук Роман Миколайович, Стрілець Олег Романович
МПК: F16F 15/30
Мітки: маховика, моменту, спосіб, інерції, регулювання, динамічного
Формула / Реферат:
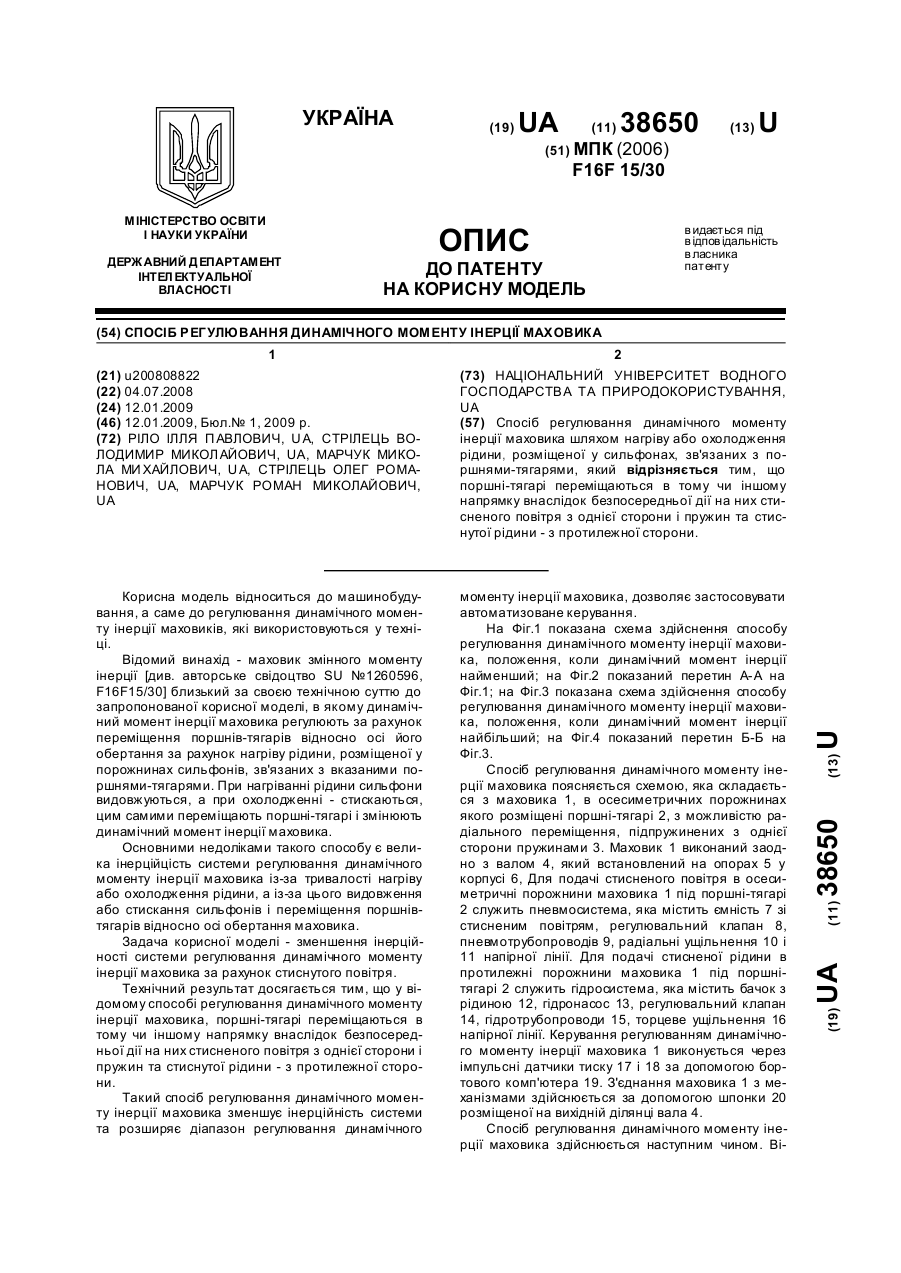
Спосіб регулювання динамічного моменту інерції маховика шляхом нагріву або охолодження рідини, розміщеної у сильфонах, зв'язаних з поршнями-тягарями, який відрізняється тим, що поршні-тягарі переміщаються в тому чи іншому напрямку внаслідок безпосередньої дії на них стисненого повітря з однієї сторони і пружин та стиснутої рідини - з протилежної сторони.
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Кулаков Павел Ігоревич, Кухарчук Василь Васильович, Кучерук Володимир Юрійович, Поджаренко Андрій Володимирович
МПК: G01M 1/10
Мітки: спосіб, моменту, приведеного, інерції, визначення, механізму
Формула / Реферат:
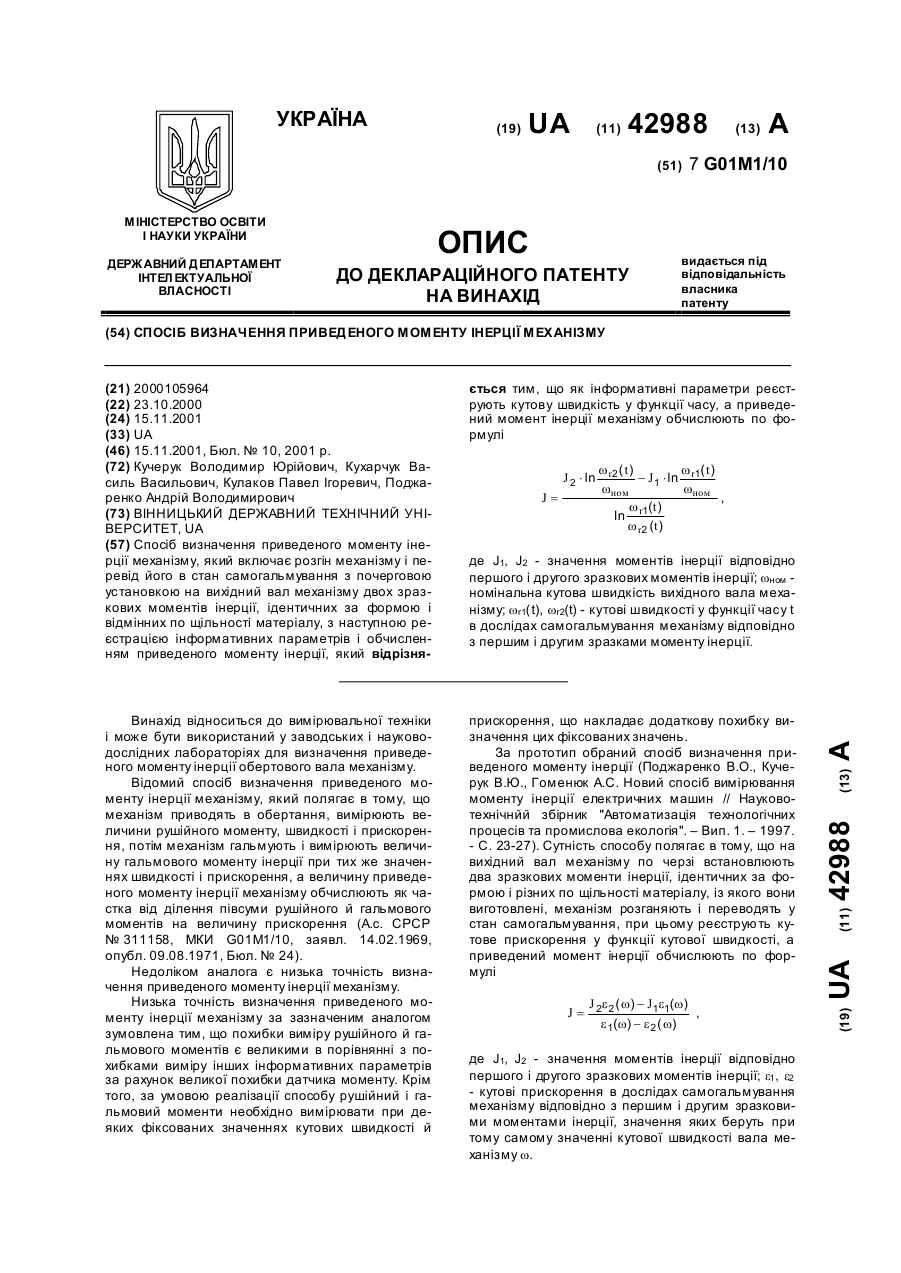
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Спосіб вимірювання моменту інерції ротора електричних машин

Номер патенту: 27658
Опубліковано: 12.11.2007
Автори: Ведміцький Юрій Григорович, Кухарчук Василь Васильович
МПК: G01L 3/10
Мітки: вимірювання, машин, інерції, електричних, моменту, спосіб, ротора
Формула / Реферат:
Спосіб вимірювання моменту інерції ротора електричних машин шляхом вимірювань в режимі самогальмування з зразковим моментом інерції та без нього, який відрізняється тим, що вимірюють проміжки часу з моменту знеструмлення електромеханічної системи до моменту досягнення ротором заздалегідь заданої кутової швидкості, за результатами часових вимірювань знаходять значення моменту інерції ротора об'єкта вимірювання за формулою:
Попередній патент: Вітроенергоустановка з карусельним генератором
Наступний патент: Спосіб пошуку покладів газу на морі
Випадковий патент: Лікувально-профілактичний засіб для підлітків, хворих на мікоз стопи